
ICS 13.110
J 09
GB/T 17888.3—2020/ISO 14122-3:2016 我替 GB/T 17888.3—2008
机械安全接近机械的固定设施 第3部分:楼梯、阶梯和护栏
Safety Of machinery—Permanent means Of access to machinery— Part 3: StairS, StePIadderS and guard-rails
(ISO 14122-3:2016,IDT)
2020-11-19 发布
2021-06-01 实施
国家市场监督管理总局片布 国家标准化管理委员会发布
附录A (资料性附录)本部分与GB/T 17888.3-2008相比的主要技术变化
GB/T 17888«机械安全接近机械的固定设施》由以下四部分组成:
第1部分:固定设施的选择及接近的一般要求;
第2部分:工作平台与通道;
第3部分:楼梯、阶梯和护栏;
第4部分:固定式直梯。
本部分为GB/T 17888
本部分按照GB/T 1
本部分代替GB/
栏》,与GB/T 1788 本部分使用/
阶梯和护栏>0 Z 与本部分/规;
-GBJ
的规则起草。
88^^008(机械安全进入机械的固定矗他:楼梯、阶梯和护 比,主要技术变化见附录AO
島采用ISO 14122-3s2016≪机械安全 接近机械的固如施<3部分:楼梯、
|
-Gq |
JTl |
|
~1 |
k要彳 |
|
本部分I | |
|
一更 |
E 了 |
|
一更1 | |
|
---更i | |
|
错误、 | |
朴引丽国际文件有一致, ,6—2012机械安全设计
B88.1-2020 机械安全接
(ISO 14122-1 s201βΓlDT)
:的我国文件如下: K
______L ,、险评估与风险减小(ISO 12100⅛ 近机械的固定设施 第1部分,固定设施的Z ≡ B, W 暨
:0IdlIDT) 接近的
本部分由垄
本部分起草
机械制造有限公司、亨
品有限公司、宁波纬据X
江奥鹏工贸有限公司、中
程研究中心、厦门莱凯盛智能
公司、西安旭迈智能家电科技有限公司:
必及“8.2.2试验程序乓及其下属
_________________ _ _ g
金禄准化接术蓼员会(SKC存吞208)提出并归m
如斯壮格安全设备有限公司、张家港市华祥离心机尊矗 限厶司、安徽邓氏 N锚集团有限责任公司、郑州贵竹工贸有限公項屉区万怡家居用 公司、上海瑞居金属制品有限公形朔俗攀赢制品有限公司、浙 Zd≥、南京林业大学/包曳生物质材料国家地方联合工 Jg扃第EePrW、南京轻机包装机械有限 雄阉£邸釦E⅛、苏州立宏标准化咨询服务有限
条的编号
公司、陕西国宏福检测技术有限公司、南安市中机标准化研究院有限公司、金华旺源电子科技有限公司、
陕西协佳亚光软件有限公司、浙江安雅智能科技有限公司、泉州市标准化协会、苏州市计量测试院。
本部分主要起草人:黄梅芳、姚佳宜、邓衍夫、刘小林、周泓伶、刘志隆、李勤、王胜江、杨毅、董凯菠、 胡有瑜、蔡宝荣、闻丽君、陈明珍、赵茂程、陈妙仁、林兴乐、付卉青、苏世伟、陈能玉、朱斌、陈东敏、李杰、 居荣华、陈志强、程红兵、刘治永、于波、陈惠玲、蔡彬彬、徐浩智、王学志、李春平、熊裕平、蔡嗇、陈卓贤、 李立言、沈德红、秦培均、黎嘉涛、刘英、林宏松、陈家兴、侯红英、张晓飞。
本部分所代替标准的历次版本发布情况为:
GB 17888.3—1999、GB/T 17888.3—2008o
机械领域安全标准的结构如下:
A类标准(基础安全标准),给出适用于所有机械的基本概念、设计原则和一般特征。
B类标准(通用安全标准),涉及在机械的一种安全特征或使用范围较宽的一类安全装置:
• Bl类,安全特征(如安全距离、表面温度、噪声)标准;
• B2类,安全装置(如双手操纵装置、联锁装置、压敏装置、防护装置)标准。
-C类标准(机械产品安全标准),对一种特定的机器或一组机器规定出详细的安全要求的标准。
根据GB/T 15706,GB/T 17888的本部分属于B类标准。
本部分尤其与下列与机械安全有关的利益相关方有关:
--机器制造商I
——健康与安全机构。
其他受到机械安全水平影响的利益相关方有:
一机器使用人员;
——机器所有者;
——服务提供人员;
——消费者(针对预定由消费者使用的机械)。
上述利益相关方均有可能参与本部分的起草。
此外,本部分预定用于起草C类标准的标准化机构。
本部分规定的要求可由C类标准补充或修改。
对于在C类标准的范围内,且已按照C类标准设计和制造的机器,优先采用C类标准中的要求。
GB/T 17888的目的是规定安全接近机器的通用要求。GB/T 17888.1给出了需要接近机器而又 无法从地面、地板或平台直接接近机器时.如何正确选择接近设施的指南。
本部分规定的尺寸与ISO 15534-3给出的人类工效学数据一致。
1范围
GB/T 17888的本部分规定了作为固 式接近设施上的无动力可调(如可I 注1: “固定式”接近设施是 本部分规定的最低郭
是此类设施的主要町
注2:如果没有
本部分与Gjrr K GB/T 178*适由百 施,如电梯、
瑟⅛力楼梯、阶梯和护栏.以及这类固定 时滑动)部件和活动部鬲萋J 聾搬安 達 ∏ΓfflRfeS 樓)后,Mi
Wil皆诚赢器的建筑物上的同寥路喉 H 酔啰羸■器使用。 、
农准分也适用于本部分范围之外的接近设施.
81中针对楼梯、阶梯和护栏规定的要求一起使用。
:式接近设施的固定式机械和移动式机械,查适用V带列力的接近设 扶讯或其他专门设计用于在两级平面之间提升人员的装置。
f % 1
V \
移除的接近设施.
楼梯、阶梯和护栏),前提
,縛
对十本文件的应用是必不可少的。凡是注日期的引用文■件,仅注日期的版 日*的引用文再,其最新版本(包括所有的修改単)适加于本文件。
'0祖械安全 设计通则 风险评估与风险减小(Safety OfmaChineryTK k —¾isk assessment and risk reducK ISO 141⅛-4s2‰6机械安全 接近机械的固定设施 第1部分:固定设侖呼饵 要 ^(Safety Pay^I: G
means and genersλrequ⅜KmentS Of access) / /
2规范性弓
下列文] 件。凡是不I
ISO 12∣ PieS for (IeSii
于本文
∣0
enι
aɪ princi-
潛近的一般
IOiCe Of fixed
3术语和定义
ISO 1210OJSO 14122-1
3.1
楼梯StairS
阶梯 SteP IadderS
可实现从一个水平面步行到另一个水平面的连续水平表面——踏板(3.1.11)和梯台(3.1.5).
注1:楼梯/阶梯的构件在图1中给出,并在3.1.1〜3.1.16给出定义.
注2:关于楼梯/阶梯倾角(3.1.9).详见ISO 14122-ls2016,3.2和3.3.
以及下
于本
说明:
H--上升高度;
g——级距;
e——净空高度;
h ---级高;
r——重叠长度;
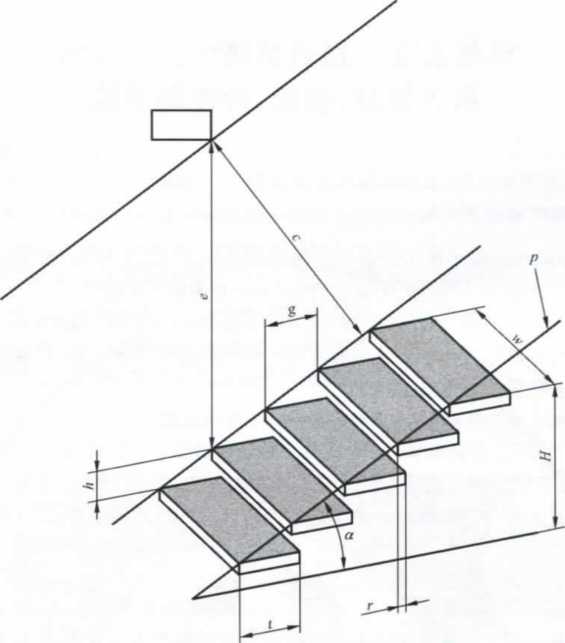
a 倾角;
W--寛度>
P--坡度线;
t——踏板深度;
C——净空.
图1楼梯构件
3.1.1
上升高度 CIimbing height
H
基准面与梯台(3.1.5)之间的垂直距离。
注:见图1中的H.
3.1.2
梯段∏ight
两个梯台之间(3.1.5)的不间断踏板(3.1.11)序列。
3.1.3
级距going
g
两个连续踏板的突沿(3.1.12)之间的水平距离。
注:见图1中的g.
3.1.4
净空高度 head-height
e
坡度线(3.1.8)到上方障碍物(如梁、走线槽等)的最小竖直距离。
注:见图1中的¢.
3.1.5
梯台 Ianding
位于梯段(3.1.2)末端的水平休息区域。
3.1.6
走线 WaIking Iine
表示使用者平常路线的理论直线。
3.1.7
重叠长度OVerlaP
F
踏板深度与级距(3.1.3)之间的差。
注:见图1中的r.
3.1.8
坡度銭 PitCh Iine
P
一条假想的直线,此直线连接具有走线(3.1.6)的连续踏板(3.1.11)的突沿(3.1.12)前缘,并且从梯 段(3.1.2)顶部的梯台突沿向下延伸至梯段底部的梯台。
注:见图1中的p.
3.1.9
倾角 angle Of PitCh
a
V楼梯或阶梯 > 坡度线(3.1.8)与其在水平面上投影之间的夹角。
注:见图1中的α.
3.1.10
级高rise
h
连续两级踏板(3.1.11)之间,从一级踏板上表面至下一级踏板上表面测得的垂直距离。
注:见图1中的方.
3.1.11
踏板SteP
上、下楼梯/阶梯(3.1)时踩踏的水平构件。
3.1.12
突沿 nosing
踏板(3.1.11)或梯台(3.1.5)前部的顶边。
3.1.13
斜梁String
支撑踏板(3.1.11)的侧面框架构件。
3.1.14
宽度 Width
踏板(3.1.11)两侧边之间的距离。
注:见图1中的
3.1.15
踏板深度 depth Of SteP
从踏板(3.1.11)前缘或突沿(3.1.12)至踏板后沿之间的净距。
注:见图I中的
3.1.16
净空 CIearanCe
垂直于坡度线(3.1.8)方向上,坡度线到上方障碍物之间的绝对最小距离。
注:见图1中的c.
3.2
护栏 guard-rail
楼梯、阶梯(3.1)、或梯台(3.1.5)、平台和通道可能配备的防止从侧面跌落的装置。
注:护栏的典型构件如图2所示,并在3.2.1~3.2.5中定义.
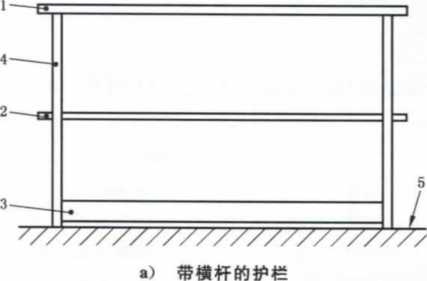
说明:
1——扶手;
2 横杆;
3——踢脚板;
4— —支柱,
5— —步行面;
6--立杆。
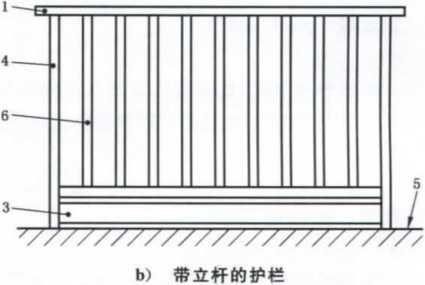
图2护栏结构示例
3.2.1
扶手 handrail
设计成用手抓住以支撑身体的刚性顶部构件,既可单独使用,也可用作护栏(3.2)±部构件。
注:见图2中的1.
3.2.2
横杆 knee rail
用于提供补充保护防止身体通过且与扶手(3.2.1)平行的护栏(3.2)刚性构件。
注:见图2中的2.
3.2.3
支柱 StanChiOn
将护栏固定于平台或楼梯(3.1)的护栏(3.2)垂直构件。
注:见图2中的4.
3.2.4
踢脚板toe-plate
防止物体从地板平面落下的护栏(3.2)刚性下部构件。
注1:见图2中的3.
注2:踢脚板也通过减小地板和横杆(3.2.2)之间的自由空间来阻止人体通过.
3.2.5
自闭门 SeIf-CIOSing gate
供人员出入且可自行关闭的护栏(3.2)上的旋转构件。
注1:见图10.
注2:牌止位置为关闭。
3.2.6
平台装卸门 mezzanine gate
设计用于在平台上装载和卸载货物,并能持续提供坠落保护的门。
注:见图3.
a)旋转门 b)升降门
图3平台装卸门功能原理示例
3.2.7
转移区 transfer zone
装载区和平台装卸门(3.2.6)运动所需空间确定的区域。
4 一般要求
4.1结构和材料
楼梯、阶梯和护栏,包括其零配件、钗链、锚定点、支撑和支架的设计、构造以及材料的选择应使其能 耐受可预见的使用条件(见ISO 14122-1:2016,第5章)。尤其是应至少满足以下要求:
a) 楼梯、阶梯和护栏的尺寸应与可获得的人体测量数据一致(也可参见ISO 15534-1和
ISO 15534-3);
b) 护栏的设计和构造应防止物体坠落。
注:物体从踏板开口坠落产生的风险,参见ISO 14122-2,2016,4.2.4.5.1.
运动部件(门)、可调节部件(如可折叠、可滑动)及可移动部件的打开或关闭不应对使用者或周围人 员产生新的危险(如剪切或坠落)。
4.2结构和踏板的设计与构造
4.2.1结构和踏板的设计应能可靠的承受可预见的载荷。
在工业领域,施加到楼梯或阶梯上的未修正载荷随着用途不同而不同。对于每种用途,应规定预期 的未修正载荷。在计算时,应至少采用以下假定的未修正载荷,但在可预见有更大载荷时,有必要采用 更大的值:
a) 低密度无载荷人员通行:1.5 kN∕m2 J
b) 低密度有载荷人员通行或高密度人员通行:5 kN∕m2o
4.2.2踏板应能承受以下未修正载荷:
如果净宽SVl 200 mm,则1.5 kN应分布在楼梯宽度中间100 mmX100 mm的区域上,该区 域的一条边线为突沿的前缘;
如果净宽w≥l 200 mm,则应在最不利的点,将两个1.5 kN的载荷分别同时分布在两个间隔 600 mm的100 mmX 100 mm的区域上,该区域的一条边线为突沿的前缘。
在未修正载荷作用下.踏板的结构支撑与踏板之间的挠度不应超过踏板跨度的1/300或6 mm,取 两者中的较小值。
5楼梯的特殊要求 5.1级距g和级高人应满足公式(1):
600 ≤ g ÷ 2Λ ≤ 660(单位为毫米)
..............................(1 )
5.2 级距(C减去r,见图4)应为210 mm〜310 mmo
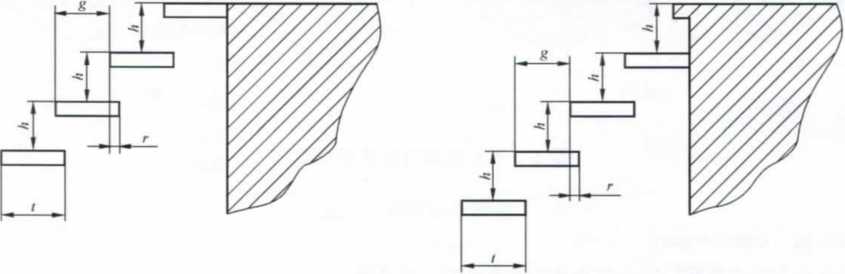
图4最上一级踏板的位置
5.3踏板的重疊长度r应大于或等于10 mm,且同样适用于梯台和地板。
5.4在同一梯段浦应一致。如果不可能实现,则该梯段第一级踏板的级高知最大可减少15%。
5.5最上一级踏板应与梯台平齐(见图4)。
5.6 净空高度e应至少为2 30Omm(见图1)。
5.7 净空C至少应为1 90Omm(见图1)。
5.8楼梯的净宽S至少应为800 mm,当楼梯经常有人通过或多人同时交叉通过时,宽度应増加到
1 000 mm。如果楼梯作为逃生通道,则楼梯净宽应满足相应法规的要求。
对于上升高度H低于1 500 mm的单个梯段,净宽W可从600 mm减小至500 mmo
因机器的设计、环境或只是偶尔使用(如每年低于30 d且每天低于2 h)等原因,净宽W可从 800 mm减小至600 mmβ如果地板上方可获得的空间受到管道、电力设备或机器结构等因素的限制, 则在地板上方200 mm范围内,净宽W最低可减小至500 mm(参见ISO 14122-2:2016,图1).
在净空高度处或地板上沿着楼梯安装的管道、电缆桥架等障碍物,不应将净宽W减小至500 mm
以下(参见 ISO 14122-2:2016,图 1).
5.9对于单个直梯段(见3.1.2),上升高度H不应超过4 000 mmβ
对于多个梯段,単个梯段的上升高度H(见图1)不应超过3 000 mm,并且在连接到另一个梯段之 前,有必要设置梯台。梯台的长度应大于或等于楼梯的宽度,但至少应为800 mm。
关于楼梯护栏的要求
阶梯的特殊要求
高.则最大
至少为2
至少
mm
升高度耳 ,宜考虑2
,净空(C)和一
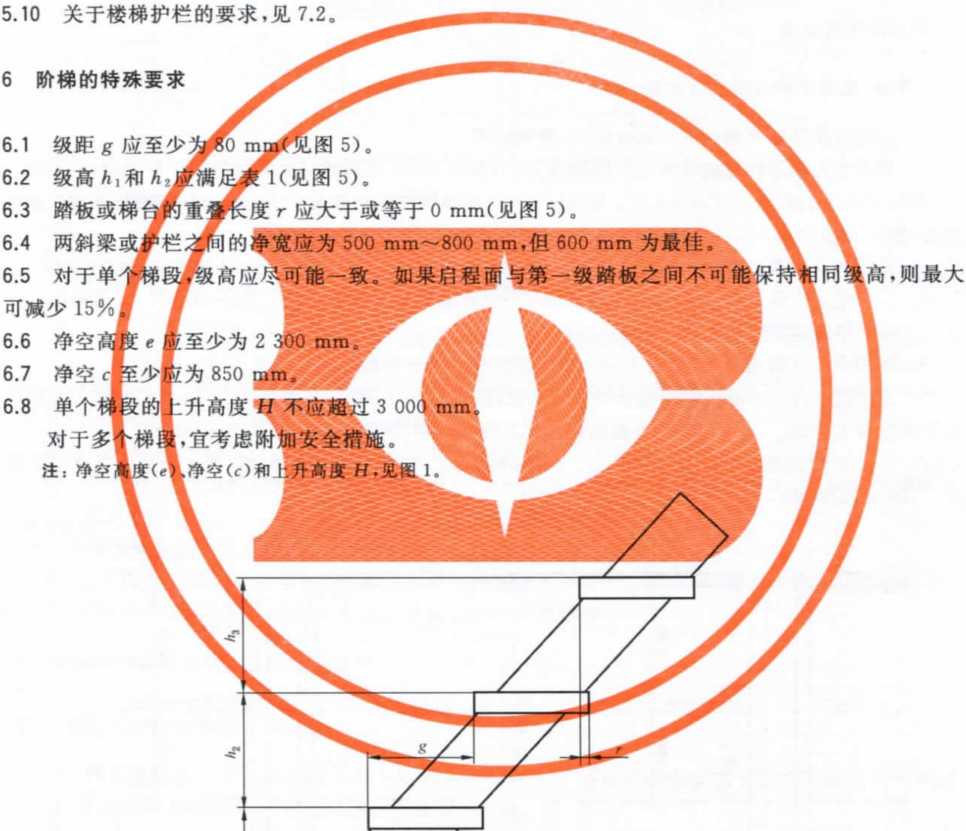
级距g应至少
1(见图5).
:r应大于或等于0 mm(见图5)o
U的净宽应为500 mm~800 mm,但600 mm为最佳。
髙应尽可能一致。如果启程面与第一级踏板之间不可1
6.3踏板或梯
6.4两斜梁
6.5对于单
可减少15%,
6.6 净空髙
6.7净空e]
6.8单个日
对于多
注:净空

///////////////〃//
说明:
g--级距;
h --级高;
r——重叠长度; a 倾角.
表1级高的要求 单位为毫米
|
最大值/最小值 |
45β<α≤60β |
60c<β≤75β | ||
|
Ai |
h2 |
Λ, |
Al | |
|
最小值 |
0.5XA, |
150 |
0.5×λ1 |
230 |
|
最大值 |
Λ1÷15 |
200 |
ht +40 |
300 |
7护栏的特殊要求
7.1平台、通道及楼梯梯台的护栏
7.1.1可能的坠落高度超过500 mm时,应安装护栏。
7.1.2当平台与机器构件或墙壁之间的间隙大于180 mm时,或防护结构不能等效于护栏时,应安装护 栏(参见ISO 14122-2:2016,4.2.4.5)o但是,平台与相邻构件的间隙大于20 mm时,应安装踢脚板或填 缝板(参见 ISO 14122-2:2016,4.2.4.5).
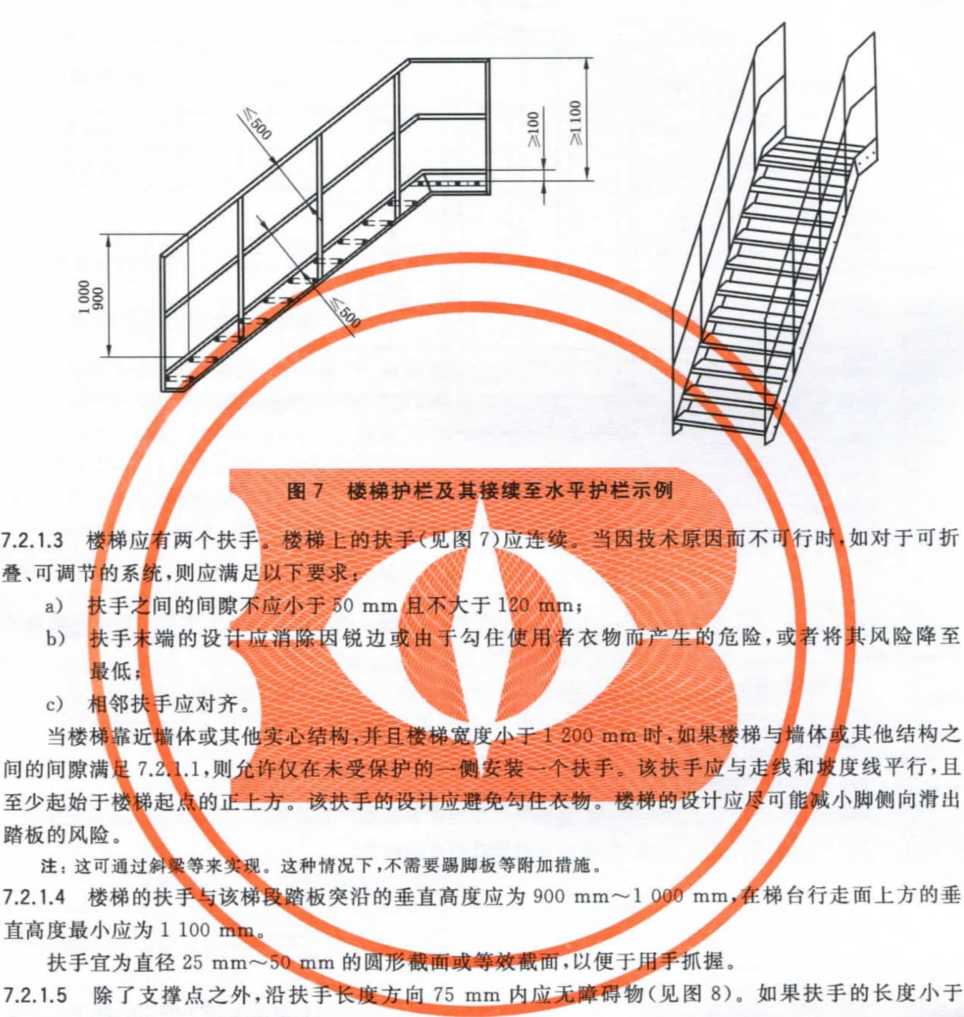
7.1.3护栏的高度至少应为1 100 mmo扶手的高度应小于或等于1 100 mm.扶手应平行于走线。
7.1.4护栏应至少包括一根中间横杆[见图2 a)]或其他等效的保护结构。扶手与横杆,以及横杆与踢 脚板之间的净距离不应超过500 mmo
7.1.5当用立杆代替横杆时[见图2 b)],各立杆之间的水平净间距最大应为180 mm。
7.1.6高度至少为100 mm的踢脚板与步行表面,以及平台(见图6)和楼梯梯台(见图7)边缘之间的距 离最大应为12 mmo如果相邻护栏段的踢脚板之间有间隙,则该间隙不应大于20 mmo
7.1.7各支柱轴线间的距离推荐限制在150Omm以内。如果超过了该距离,则应特别注意支柱的固 定强度和固定装置。
单位为毫米
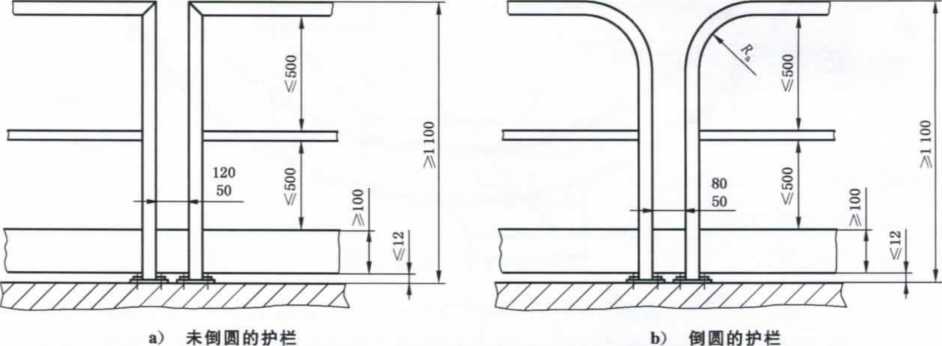
图6两个护栏段之间的净距离
说明:
R.——半径.
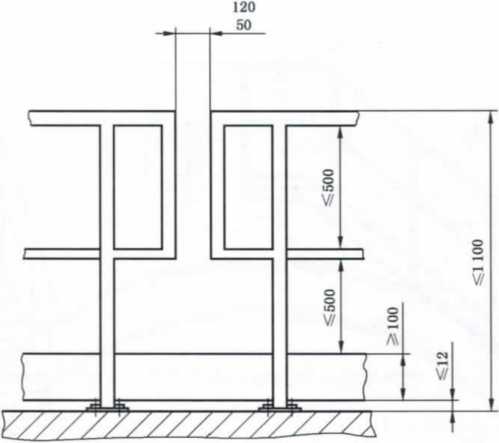
C)带“D”字支柱的护栏
图6两个护栏段之间的净距萬(续)
7.1.8如果扶手有中断(护栏段),则应避免两个护栏段之间的运动造成的挤压和剪切。如果不能通过 设计消除,则应满足以下要求.以防止夹手或坠落:
a) 不倒圆时,两个支柱之间的净空不应小于50 mm且不大于120 mm[见图6 a)];
b) 倒圆时,两个支柱之间的净空不应小于50 mm且不大于80 mm[见图6 b)]β倒圆半径最大 应为200 mm。
7.1.9如果需要穿过护栏,则应采用自闭门或平台装卸门(见7.4)。
7.1.10扶手末端的设计应消除因锐边或由于勾住使用者衣物而产生的危险,或者将其风险降至最低。
7.1.11可固定的或可折叠的护栏应配备防止被意外打开的组件。
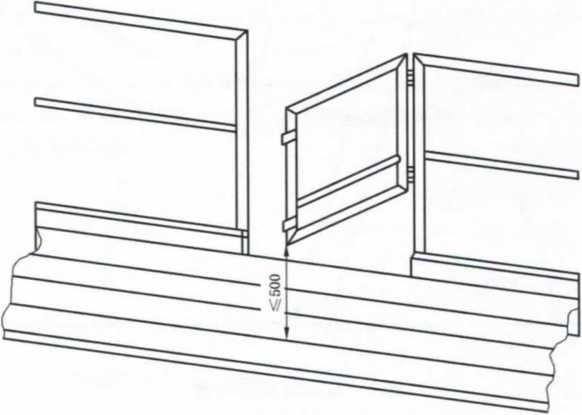
7.2楼梯的护栏和扶手以及阶梯的扶手 7.2.1楼梯的护栏和扶手
7.2.1.1只要楼梯的上升高度超过500 mm就应安装护栏。当斜梁外侧有大于120 mm的横向间隙 时,为了提供保护,应在具有此间隙的楼梯侧面安装护栏。
7.2.1.2扶手与斜梁之间的空间至少应采用一个横杆或等效的装置封闭。扶手到横杆以及横杆到斜梁 的净距离不应超过500 mm(见图7)0
单位为毫米
如对于可折
可调节的系
mm
F其他结构之 【度线平行,且 小脚侧向滑出
应对齐。E
体或其他实心结构,并且楼扌
k」,则允许仅在未受保护的
7)应g。当因技术原因而不
这种情况下,不需要踢脚板等附加措施。
[踏板突沿的垂直高度应为900 mm
以籍抓握。
见图8)。如果扶手的长度小于
F 1 200 mm时,如果楼梯 一个扶手。该扶手应与走 该扶手的设计应避免有住衣物。楼梯的设计应,尽
当楼梯 间的间隙满 至少起始于 踏板的风险
注:这可通过伊来噴( 7.2.1.4楼梯的扶事唾击 直高度最小应为1 100‰j
扶手宜为直径25 mm
7.2.1.5 除了支撑点之外.沿扶
mm梯台行走面上方的垂
有两个扶手武楼梯上的扶;
E则应满足以下要求笋
间的间隙不应小于50 mm W Ir
.端的设宜蠢消除因锐边或由手勾住使用者衣物危险
500 mm,则可50 mm内无障碍物。
|
厂 i | ||
|
夕 = |
S |
§ |
|
二 | ||
|
F= |
— | |
|
1 | ||
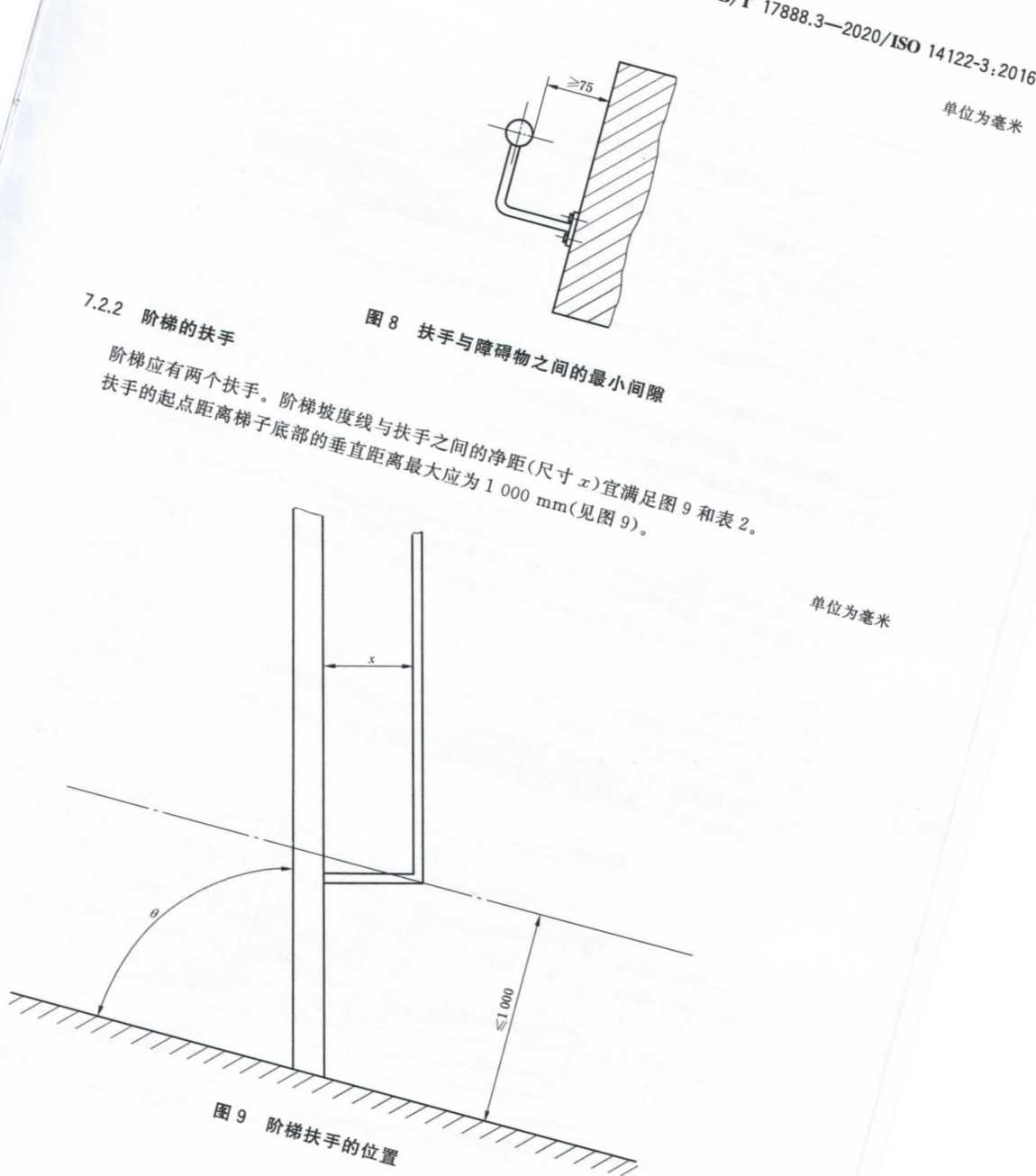
表2阶梯坡度銭与扶手之间净距的示例
|
θ C) |
X mm |
|
45 |
625 |
|
__________________________50___________________________ |
__________________________500__________________________ |
|
55 |
375 |
|
60 |
250 |
|
65 |
200 |
|
70 |
150 |
|
75 |
__________________________100__________________________ |
7.3阶梯、楼梯或直梯靠近工作平台护栏时的附加坠落防护
安装的阶梯、楼梯或直梯靠近工作平台的护栏时,通常1 100 mm的高度并不足以防止坠落。在这 种情况下,需要采取附加防护措施(如延长护栏的高度)(参见ISO 14122-4:2016,图16和图17).
7.4门
7.4.1自闭门
人员需要通行时.应采用自闭门,且自闭门应满足相邻护栏的要求。
与7.1.6的不同之处在于不需要踢脚板。应避免出现剪切点和挤压点。尺寸应满足图6。
自闭门应:
a) 自行关闭;
注:可通过弹力或重力等实现自行关闭.
b) 保持在关闭位置但不锁定;
C)设计成容易朝平台或地板方向打开;
d)关闭时由坚固挡块阻挡,以防止使用者推开并从开口处坠落。
单位为毫米
7.4.2平台装卸门
平台装卸门应满足7.1中除7.1.7之外的所有要求,以及本条的要求。
除了一般要求(第4章)之外.平台装卸门的设计应使其满足以下要求:
操作者可在不暴露于坠落风险的前提下放置或移开载荷(如托盘);
操作者可在危险区之外手动操作门;
平台装卸门打开且坡道/边缘处的门关闭时,不应限制人员在转移区内的活动;
——在转移区.平台与处于关闭位置的门的下边缘之间的间隙高度应小于500 mmj
手动操作力不应超过机械操作的推荐力限值(参见EN 1005-3:2OO2+ Al s2008 and EN 1005-
2 :2003+A1,2008),
在手动关闭门时,操作者应能清晰观察转移区,从而将陷入风险降至最低(见ISO 12100:
2010,6.2.2) j
——通过重力释放时,平台装卸门应在稳定位置自我关闭;
在运动过程中.尤其是在操作位置操作时.应避免挤压和剪切。间隙为100 mm或以上(参见 ISO 13854)时,可满足此要求;
——门的垂直运动部件之间的间隙应小于180 mm∣
一进入维护点无坠落风险;
——仅在平台装卸门有坠落风险的一侧提供踢脚板。
根据设计,相对运动的门的下表面与地板面之间的间隙应为120 mm,以避免脚被挤压。
8安全要求的验证
8.1 一般要求
安全要求可通过测试或计算进行验证。
a) 选择测试时,应采用本章给出的试验程序;
b) 选择计算时.应考虑本章的要求和假设,以使两种方法的强度验证可比。
8.2护栏的试验
8.2.1概述
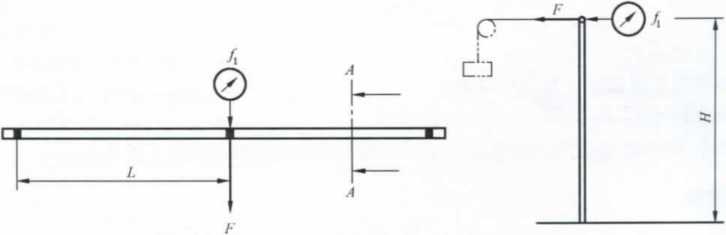
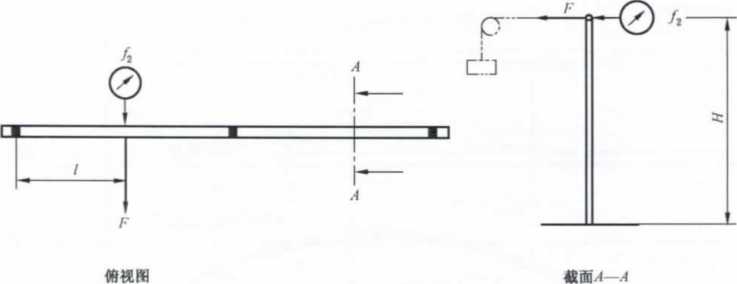
试验应在安装于通道上的具有三个支柱、扶手和横杆的护栏上进行。
根据8.2.2.1或8.2.2.2,所有载荷(F)为基于最小使用载荷300 N/m的集中载荷。该载荷应水平 施加且不产生动载荷,首先施加在中间支柱处的扶手中心平面上(位置1,图11).在第二次试验时,载 荷应施加在两个支柱之间扶手最薄弱的中心点(位置2,图12)o
通过挠度计在扶手的中心线上测量挠度A和,2。第一次试验,在位置“厶”姓水平测量挠度人(见 图11);第二次试验,在位置“人”处测量挠度(见图12)β
8.2.2载荷
8.2.2.1用于可用性验证的载荷
用于可用性验证的载荷通过公式(2)表示:
FU =300 N/m X L ..............................( 2 )
8.2.2.2用于强度验证的载荷
用于强度验证的载荷通过公式(3)表示:
根据钢和铝的材料系数y = 1.75,可得出公式(4):
注:采用其他材料时,如GRP(玻璃钢),载荷值可能需要更高且需要进行冲击试验。
8.2.2.3预加载荷
预加载荷通过公式(5)表示:
8.2.3试验程序
8.2.3.1位置1的试验
为避免定型效应,预加载荷FP施加到扶手的位置1上持续1 min,如图12所示。去除载荷后,应将 测量表归零。
载荷FU应按照同样的方式施加到位置Ie施加载荷的过程中的挠度不应超过30 mm。
测量挠度后,应将载荷增加至Fs。施加载荷FS并保持Imin。去除载荷后,永久变形不应超过高度
H 的 0.3%.
俯视图 截面JT
说明:
/1---挠度J
L——两个支柱之间的最大距离;
F--载荷;
H——扶手的高度。
图11支柱的测量
8.2.3.2 位置2的试验
为避免定型效应,预加载荷FP施加到扶手的位置2上持续1 min,如图12所示。去除载荷后,应将 测量表归零。
载荷FU应按照同样的方式施加到位置2。施加载荷的过程中的挠度不应超过30 mmβ
测量挠度后,应将载荷增加至Fs。施加载荷FS并持续Imin。去除载荷后,永久变形不应超过距 离L的0.3%。
说明:
ft---挠度;
I——支柱至最薄弱点的距离
F--载荷;
H——扶手的高度;
. ——通常位于L/2处.L见图11.
图12扶手的测・
8.3楼梯踏板的试验
8.3.1概述
为验证4.2中规定的要求.应通过试验测量楼梯单级踏板的挠度。
该试验(见图13)应在至少包含两级踏板的一段楼梯上进行。
将样品固定在地面和支撑墙(如挡块,见图13),以使样品结构在试验过程中不会移动。
根据宽度(斜梁与支撑结构之间的净宽3),试验应通过一种试验载荷(见图14)或两种试验载荷 (见图15)进行。
试验载荷应施加到没有锐边且最大尺寸为100 mm×100 mm的刚性块(衬底)上。
试验载荷通过公式(6)计算:
FS=/ X Fa ..............................( 6 )
式中,最小设计载荷Fd = 1.5 kN,钢和铝的材料系数》=1.75。
为避免定型效应造成的测量误差,楼梯的被测部位宜首先加载预加载荷FP=O.25XFs°
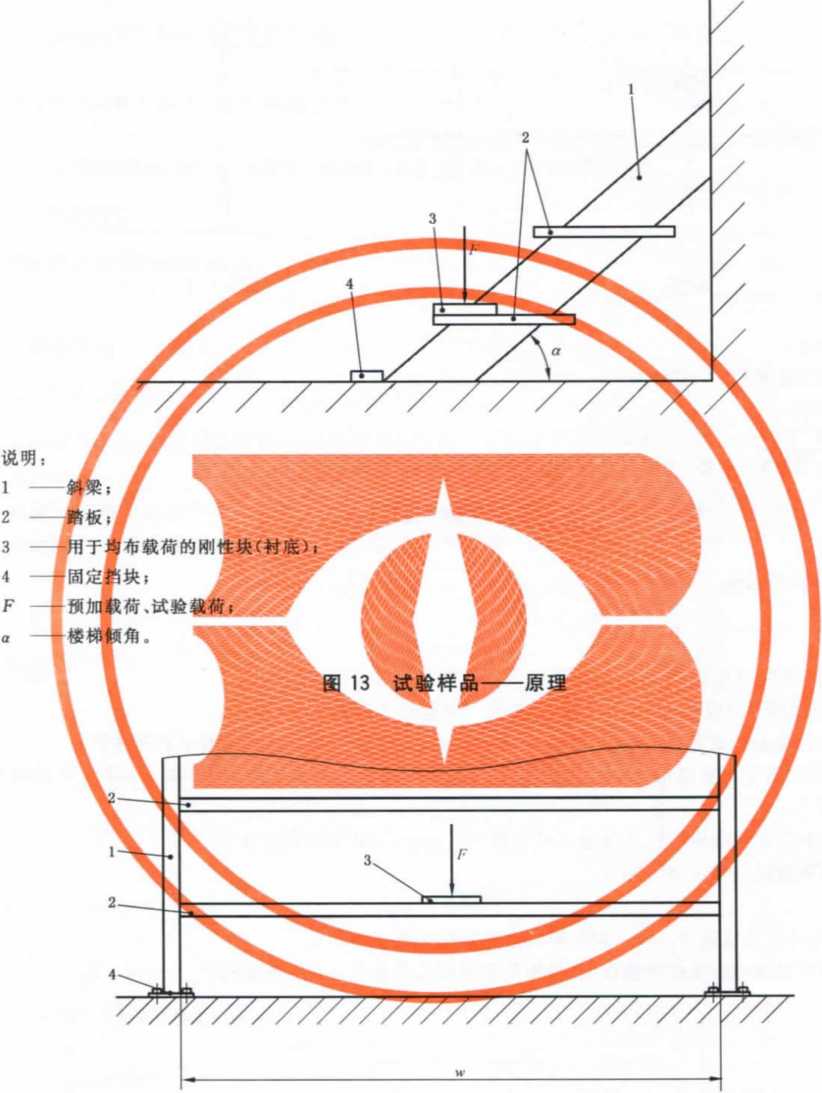
说明:
1——斜梁;
2 ---踏板I
3— —用于均布载荷的刚性块(村底);
4— —固定挡块;
F——預加载荷、试验载荷;
W --净宽.
图14 WVl 20Omm的试验样品
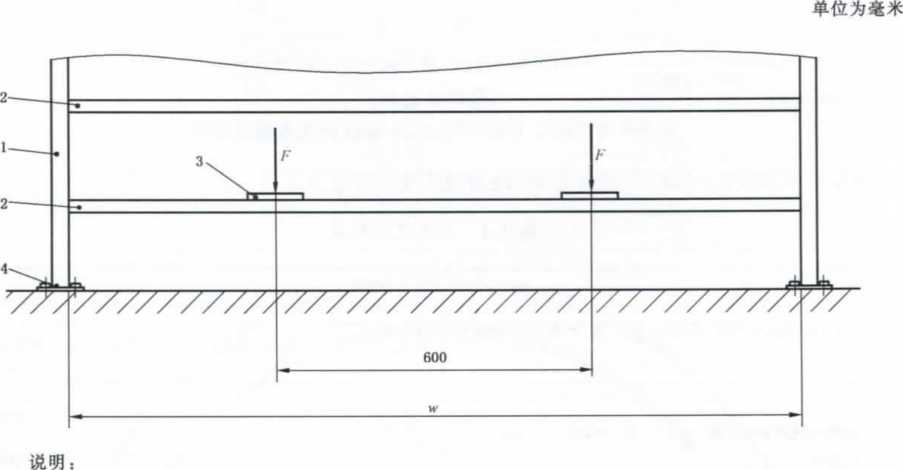
ɪ --斜梁;
2— —踏板;
3— —用于均布载荷的刚性块(村底);
4 --固定挡块;
F ——预加载荷、试验载荷;
W --净宽.
图15 w≥1 200 mɪn的试验样品
8.3.2试验程序
按照图13、图14和图15,将100 mm×100 mm的刚性块置于踏板最薄弱的点上,或者按照刚性块 之间相距600 mm的方式放置。
将预加载荷FP缓慢施加到刚性块上并保持载荷至少1 IninO移除载荷后,测量装置应重新归零。
将试验载荷FS缓慢施加到刚性块上并保持至少1 min0移除载荷后,永久性挠度不应超过跨度的 0.3%或者 6 mm0
8.4阶梯的试验
对阶梯的试验,可参照GB/T 17889.2.
附录 A (资料性附录)
本部分与GB/T 17888.3—2008相比的主要技术变化
本部分与GB/T 17888.3—2008相比的主要技术变化见表A.I.
表A.1主要技术变化
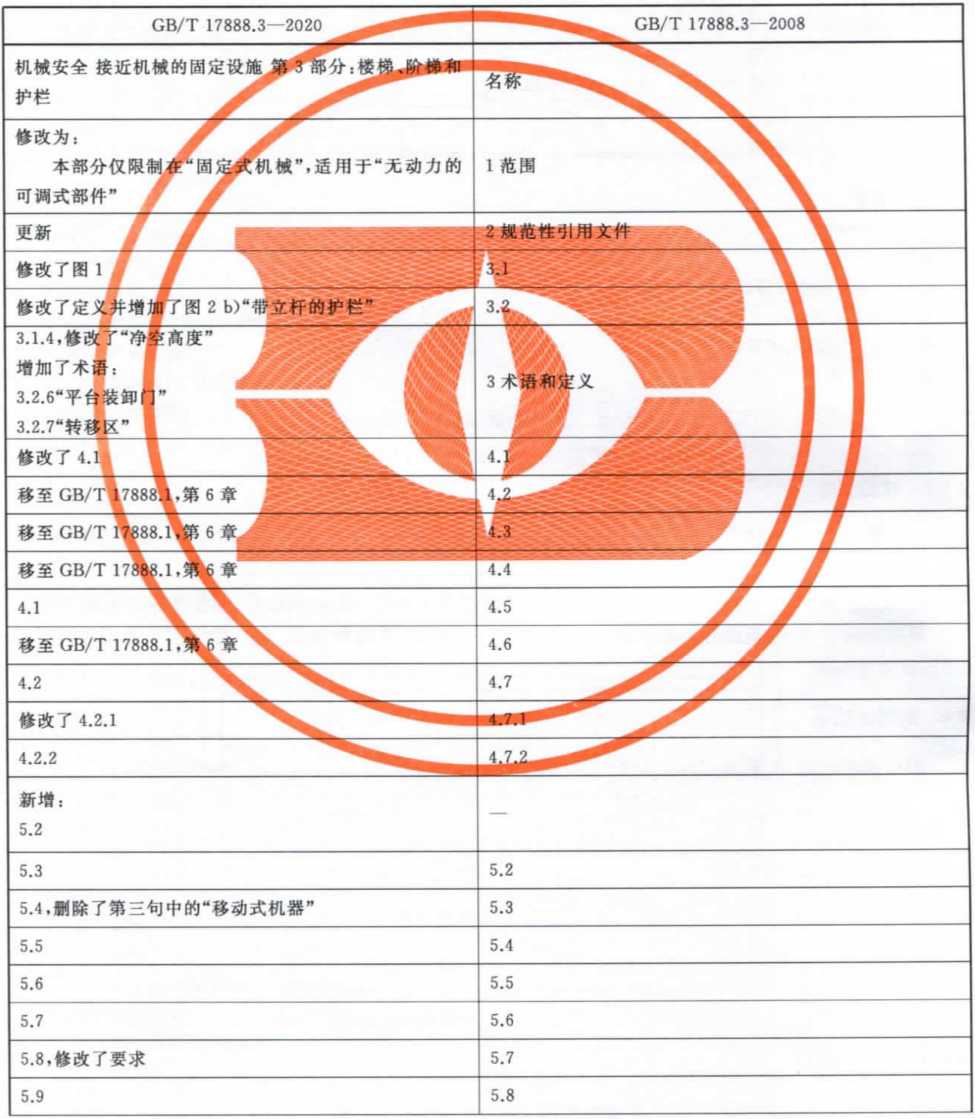
表A.1 (续)
|
GB/T 17888.3—2020 |
GB/T 17888.3—2008 |
|
5.10 |
5.9 |
|
第6章,增加了图5“踏板梯子的级高”和表1“级高的要 求” |
— |
|
6.1,将“踏板深度”改为“级距” |
6.1 |
|
6.2,引用新的图和表 |
6.2 |
|
6.3,将重叠长度的值从“大于或等于10”修改为“大于或 等于0” |
6.3 |
|
6.4,净宽由“450 InmW改为“500 mm” |
6.4 |
|
6.5 .删除了第三句中的“移动式机器” |
6.5 |
|
7.1,标题改为“平台、通道及楼梯梯台的护栏” |
7.1 |
|
7.1.1 |
7A.2 |
|
7.1.2,将间隙由“200 mm”改为“180 mm”.“30 mm”改为 “20 mm” |
7.1.3 |
|
7.1.3,修改了扶手的要求 |
7.1.4 |
|
7.1.4 |
7.1.5 |
|
74.5 |
7.1.6 |
|
7.1.6,修改广间隙由10 mm增加至12 mm”,増加“与相 邻护栏段的賜脚板的间隙最大为20 mm” |
7.1.7 |
|
7.1.7.增加图6 b),倒圆的护栏 |
7.1,03 4,7.1.8 |
|
7.1.8,修改“倒圆护栏的要求” |
7.1.9 |
|
7.1.9/自闭门”的要求移到7.4“门” |
7.1.10 |
|
7.1.10 |
7.1.11 |
|
新条 7.1.11 |
— |
|
7.2“楼梯和阶梯的护栏和扶手” 7.2.1楼梯的护栏和扶手 7.2.2阶梯的扶手 |
7.2 |
|
7.2.1,修改了图 |
7.2.1 |
|
721.1L最大间隙从200 mm降至120 mm”,且根据技 术因素进一步细化了要求 |
7.2.2 |
|
7.2.1.2 |
7.2.5 |
|
7.2.1.3,修改 |
7.2.1 |
|
721.4,修改 |
7.2.3 |
表A.l (续)
|
GB/T 17888.3—2020 |
GB/T 17888.3—2008 |
|
7.2.1.5,修改,“距离从100 mm降至75 mm”,“最短距离 至 50 mm" |
7.2.6 |
|
7.2.2,扩展了表2 |
7.2.4 |
|
新条 “7.3阶梯、楼梯或直梯靠近工作平台护栏时的附加坠落 防护”____________________________ |
— |
|
新条 “7.4 ∩" 包括“7.4.1自闭门”和“7.4.2,平台装卸门”__________ |
7.1.10 |
|
第8章,完全修改 |
8,7.3 |
|
删除 |
9,10 |
|
注:本表给出了相对于GB/T 17888.3—2008的主要技术变化,并不包括所有修改。 | |
参考文献
Ell GB/T 17889.2梯子第2部分:要求、试验和标志
[2] ISO 2867 Earth-moving machinery—ACCeSS SyStemS
[3] ISO 4254-1 AgriCUltUral machinery一Safety Part 1: General requirements
[4] ISO 13854 Safety Of machinery一MinimUm gaps to avoid CrUShing Of PartS Of the human body
[5] ISO 13857 Safety Of machinery一Safety (IiStanCeS to PreVent hazard ZOneS being reached by UPPer and IOWer IimbS
[6] ISO 14122-2 Safety Of machinery一Permanent means Of access to machinery一Part 2: WOrking platforms and WalkWayS
[7] ISO 14122-4 Safety Of machinery一Permanent means Of access to machinery一Part 4: FiXed IadderS
[8] ISO 15534-1 ErgOnOmiC design for the Safety Of machinery一Part 1: Principles for determining the CIimenSiOnS required for OPeningS for WhOIe-body access into machinery
[9] ISO 15534-2 ErgOnOmiC design for the Safety Of machinery一Part 2: PrinCiPIeS for determining the dimensions required for access OPeningS
[10] ISO 15534-3 ErgOnOmiC design for the Safety Of machinery一Part 3: AnthrOPOmetriC data
[11] EN 353-1 PerSOnal PrOteCtiVe equipment against falls from a height—Part 1: GUideCl type fall arresters including a rigid anchor Iine
[12] EN 364 PerSOnal PrOteCtiVe equipment against falls from a height—TeSt methods
[13] EN 795 PerSOnal fall PrOteCtiOn equipment—AnChOr devices
[14] EN 1005-2:2003÷ Al: 2008 Safety Of machinery一HUman PhySiCal PerfOrmanCe—Part 2: ManUal handling Of machinery and COmPOnent PartS Of machinery
[15] EN 1005-3:2002÷ AI:2008 Safety Of machinery一HUman PhySiCal PerfOrmanCe一Part 2: ManUal handling Of machinery and COmPOnent PartS Of machinery