方法1
方法2
特征载荷 特征载荷
设计载荷效应 设计载荷效应
ICS 27.180
F 11
GB/T 31517—2015/IEC 61400-3: 2009
海上风力发电机组设计要求
DeSign requirements for OffShOre Wind turbines
(IEC 61400-3: 2009, Wind turbines一Part3 : DeSign requirements for OffShOre Wind turbines,IDT)
2015-05-15 发布
2016-02-01 实施
附录B (资料性附录)波谱公式 ....................................................;
附录E (资料性附录)冰载作用下海上风力发电机组支撑结构的设计
附录G (资料性附录)用于极限强度分析的海洋气象运行参数的统计外推
∏
* r ,r-⅜τ-.
刖 S
本标准按照GB/T 1.1—2009给出的规则起草。
本标准使用翻译法等同釆用IEC 61400-3 = 2009«风力发电机组 第3部分:海上风力发电机组设计 要求》(英文版)。
与本标准中规范性引用的国际文件有一致性对应关系的我国文件如下:
——GB/T 4797.1—2005 电工电子产品自然环境条件 温度和湿度(IEC 60721-2-1 : 2002, MOD)
为了便于使用,本标准做了下列编辑性修改:
a) 将“IEC 61400-3: 2009”改为本标准;
b) 删除了 IEC 61400-3: 2009中资料性概述要素(包括封面、目次和前言);
C)保留了 IEC 61400-3: 2009的引言,同时增加了本标准的“前言”;
d) 用现行 IEC 60721-2-l≡2002 替代 IEC 60721-2-1 : 1982 及其 1987 年 1 号修改单;
e) 用现行 ISO 9001:2008 替代 ISO 9001:2000;
f) 本标准修正了 IEC 61400-3:2009中的若干错误:
1) 删除了在 IEC 61400-3: 2009 中未提及的引用文件:IEC 62305-3: 2006UEC 62305-4:2006;
2) 修改了 7.4.6、7.6.1.1.2中提及公式编号的错误,以及式(D.9)和式(D.10)中反双曲正切三 角函数的写法错误;
3) 参考文献中补录= IEC 60721-3-3:2002o
本标准由中国机械工业联合会提出。
本标准由全国风力机械标准化技术委员会(SAC/TC 50)归口。
本标准主要起草单位:华锐风电科技(集团)股份有限公司、中国农业机械化科学研究院呼和浩特分 院、神华国华能源投资有限公司、中国船级社、北京鉴衡认证中心有限公司、上海绿色环保能源有限公 司、上海勘测设计研究院有限公司、浙江运达风电股份有限公司、湘潭电机股份有限公司、美泽新能源控 股有限公司、新疆金风科技股份有限公司。
本标准主要起草人:陈党慧、王建平、高辉、金宝年、马文勇、严忠、秦海岩、张开华、李健英、刘作辉、 叶杭冶、郭灯塔、张芹、金家坤、党群、唐超、田野、刘河。
本标准概述了海上风力发电机组的最低设计要求,但不是完整的设计规范或安装指导手册。
在海上风力发电机组设计、制造、组装、装配、吊装、调试、运行及维护等环节中,不同的合同方可能 负责承担不同的工作,但要确保满足本标准的要求。合同方之间的责任划分问题,不在本标准讨论范 围内。
只要能合理地证明系统的安全性不受影响,可对本标准的要求进行修改。遵照本标准并不能免除 任何个人、组织或公司应该遵照的其他适用规范的责任。
1范围
本标准规定了海上风力发电机组场址外部条件评估的附加要求,以及确保海上风力发电机组工程 完整性的基本设计要求。其目的是在风力发电机组的预期寿命期间,提供适当等级的防护,以防止各种 危险对风力发电机组造成损失。
本标准致力于海上风力发电机组各结构部件的工程完整性,同时也涉及各子系统,如控制和保护机 构、内部电气系统以及机械系统。
如果风力发电机组的支撑结构承受水动力载荷,则可认定其为海上风力发电机组。本标准规定的 设计要求不能完全保证漂浮式海上风力发电机组的工程完整性。
本标准宜与第2章中提到的IECJSO以及相应国家标准一起使用。特别是本标准完全符合 GB/T 18451.1的要求。由本标准设计的海上风力发电机组的安全等级应不低于GB/T 18451.Io某些 章节中,有摘自GB/T 18451.1的内容,以便清楚地理解所规定的要求。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 18451.1—2012 风力发电机组设计要求(IEC 61400-1 :2005,IDT)
GB/T 19001—2008 质量管理体系 要求(ISO 9001 :2008,IDT)
GB/T 23511—2009石油天然气工业海洋结构的一般要求(ISO 19900≈2002,IDT)
IEC 60721-2-1:2002 环境条件等级 第2部分:自然环境 温度和湿度(CIaSSifiCatiOn Of environmental COnditiOnS一Part 2-1: EnVirOnmental COnditiOnS appearing in nature一TemPeratUre and humidity)
ISO 2394:1998 结构可靠性的一般原则(General PrinCiPleS On reliability for StrUCtUreS)
ISO 2533 : 1975 标准大气(Standard atmosphere)
ISO 19901-1:2005石油天然气工业 海上结构的具体要求 第1部分:海洋气象设计与运行条 件(PetrOIeUm and natural gas industries一SPeCifiC requirements for OffShOre StrUCtUreS一Part 1: MetOCean design and OPerating COnditiOnS)
ISO 19901-4:2003石油天然气工业 海上结构的具体要求 第4部分:岩土与基础设计要点 (PetrOIeUm and natural gas industries一SPeCifiC requirements for OffShOre StrUCtUreS一Part 4: GeOteChniCai and foundation design COnSideratiOnS)
ISO 19902 石油天然气工业 固定式海上钢结构(PetrOIeUm and natural gas industries一FiXed Steel OffShOre StrUCtUreS)
ISO 19903: 2006 石油天然气工业 海上固定式混凝土结构(PetrOleUm and natural gas industries一FiXed COnCrete OffShOre StrUCtUreS)
3术语和定义
GB/T 18451.1界定的以及下列术语和定义适用于本文件。
3.1
同向(风和波浪)co-directional (Wmd and WaVeS)
作用在同一个方向上。
3.2
水流 CUrrent
经过某一固定点的水流,通常用流速和流向来描述。
3.3
设计波 design WaVe
用于海上结构设计的具有指定高度、周期和方向的确定性波浪。设计波可满足特殊周期波理论的 应用要求。
3.4
设计者 designer
负责海上风力发电机组设计的一方或团体。
3.5
环境条件 environmental COnditiOnS
可影响风力发电机组性能的环境特性(如风、波浪、海流、水位、海冰、海生物、冲刷和海床整体运动 等)。
3.6
外部条件(风力发电机组)external COnditiOnS (Wind turbine)
影响海上风力发电机组运行的因素,包括环境条件、电网条件和其他气候因素(如温度、降雪、覆冰 等)。
3.7
极大有义波高 extreme SignifiCant WaVe height
, 最大有义波高的期望值,为3 h以上的平均值,年超越概率为1∕N(重现期为N年)。
3.8
极大波高 extreme WaVe height
最大单个波高的期望值(通常为上跨零点波高),年超越概率为1∕N(重现期为N年)。
3.9
固定冰盖 fast ice COVer
无运动的刚性连续冰盖。
3.10
风区 fetch
风以近似恒定的速度和方向在海面上持续地吹过的距离。
3.11
基础 foundation
海上风力发电机组支撑结构的组成部分,能将作用于结构上的载荷传递至海床。不同类型的海上 风力发电机组基础以及机组其他部分如图1所示。
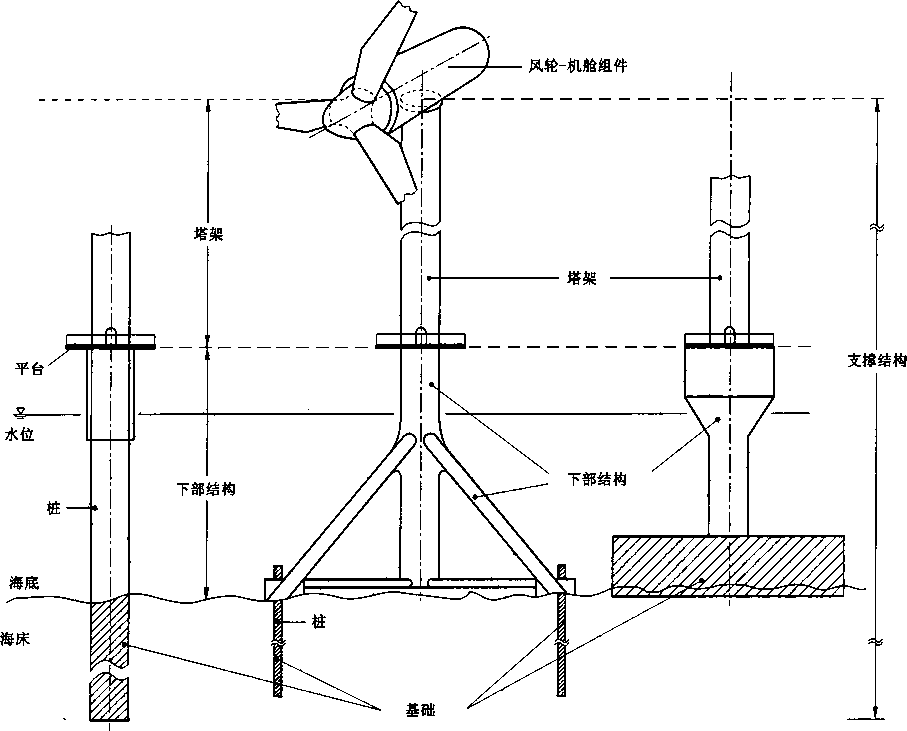
图1海上风力发电机组组成部分
3.12
最高天文潮位 highest astronomical tide
在一般气象条件下,各种天文条件任意组合所能岀现的最高静水位。由于风暴潮源于气象,本质上 无规律并与潮位变化相互叠加,因此最终静水位可能高于最高天文潮位。
3.13
追算法 hindcasting
通过数值模拟对某一区域历史(海洋气象)数据进行仿真的方法。
3.14
轮毂高度(风力发电机组)hub height (Wind turbine)
风力发电机组风轮扫掠面中心点距平均海平面的高度。
3.15
堆积冰 hummocked ice
大块浮冰相互碰撞或碰到坚硬障碍物(如海上风力发电机组支撑结构)时,碎冰和浮冰堆积形成的 冰丘。
3.16
浮冰 ice floe
未冻结于岸边,处于静止或漂移状态,大小从几米到几千米的片状冰块。
3.17
覆冰icing
海上风力发电机组某些部件上形成的可引起额外载荷和/或改变其特性的冰层或霜冻。
3.18
闭合水域 Iand-IOCked WaterS
几乎全部或完全被陆地环绕的水域。
3.19
载荷效应 IOad effect
单一载荷或组合载荷对结构部件或整个系统产生的影响,如内力、应力、应变、位移等。
3.20
最低天文潮位 IOWeSt astronomical tide
在一般气象条件下,各种天文条件任意组合所能出现的最低静水位。由于风暴潮源于气象,本质上 无规律并与潮位变化相互叠加,因此最终静水位可能低于最低天文潮位。
3.21
制造商 manufacture
负责海上风力发电机组制造和生产的一方或团体。
3.22
海洋条件 marine COnditiOnS
能够影响风力发电机组性能的海洋环境特性(波浪、海流、水位、海冰、海生物、海床运动和冲刷等)。
3,23
海生物 marine growth
由动植物和细菌引起的结构部件表面覆盖物。
3.24
平均海平面 mean Sea IeVel
排除波浪、潮汐及风暴影响,在一段足够长时间内的海平面的平均水位高度。
3.25
平均跨零周期 mean ZerO CrOSSing PeriOd
在某个海况下,跨零(向上或向下)波浪的平均周期。
3.26
海洋气象 metocean
单词“气象的"(meteorological)和“海洋学的,,(oCeanOgraPhiC)的缩写。
3.27
多向(风和/或波浪)multi-directional (Wind and/or WaVe)
方向的分布。
3.28
海上风力发电机组 OffShOre Wind turbine
支撑结构承受水动力载荷的风力发电机组。
3.29
海上风力发电机组场址 OffShOre Wind turbine Site
独立的或处于某风电场内的单台海上风力发电机组位置或拟定位置。
3.30
桩贯入深度 PiIe PenetratiOn
从海底面到桩底部的竖向距离。
3.31
电力汇集系统(风力发电机组)POWer COlIeCtiOn SyStem (Wind turbines)
从一个或多个风力发电机组汇集电能的电气系统。包括连接于风力发电机组输出端和电网接入点 之间的所有电气设备。海上风电场的电力汇集系统可包括与岸上电力系统的连接部分。
3.32
基准期 reference PeriOd
假定随机过程(如风速、海面上升及响应)保持稳定的时段。
3.33
折射 rafraction
由于水深和/或流速的变化导致波浪的传播速度改变,引起波能重新分配的过程。
3.34
余流 residual CUrrentS
除去潮流后的海流。主要指风暴潮引起的海流。
3.35
风轮-机舱组件 rotoɪ^naeeɪɪe assembly
海上风力发电机组中由支撑结构支撑的部分,参见图IO
3.36
海底 Sea floor
海水和海床的分界面。
3.37
海底坡度 Sea floor SloPe
海底的局部梯度,如海滩的倾斜度。
3.38
海况 Sea State
统计数据保持稳定的海洋条件。
3.39
海床 Seabed
海面以下用于建造支撑结构的部分。
3.40
海床运动 Seabed movement
自然地质过程引起的海床运动。
3.41
冲刷 SCOUr
由于海流、波浪或结构部件阻断海底上方水体自然流动所引起的海床面土层流失。
3.42
有义波高 SignifiCant WaVe height
在某海况下波高的统计量,定义为4×σv其中叫为海面高程的标准差。在窄带波频的海况中,有 义波高近似等于最大上跨零波高1/3的平均值。
3.43
飞溅区 SPlaSh ZOne
支撑结构在波浪和潮汐作用下干湿交替的区域。飞溅区可定义为下列水位之间的区域:
•重现期为1年的最高静水位,加上重现期为1年的有义波高的波峰高度;
•重现期为1年的最低静水位,减去重现期为1年的有义波高的波谷深度。
3.44
静水位 Still Water IeVel
考虑潮汐和风暴潮效应,并扣除波浪引起的变化而计算得到的理论水位。静水位可以高于、等于或 低于平均海平面。
3.45
风暴潮 StOrm SUrge
由于风和大气压变化而引起的不规则海洋运动。
3.46
下部结构 SUb-StrUCtUre
海上风力发电机组支撑结构的一部分,由海床向上延伸,连接基础与塔架,参见图IO
3.47
支撑结构 SUPPOrt StrUCtUre
海上风力发电机组的一部分,包括塔架、下部结构和基础,参见图I0
3.48
涌浪swell
海况中,由远离场址的风所生成的向场址移动的波浪,而非在场址局部生成的波浪。
3.49
潮流 tidal CUrrent
潮汐引起的水流。
3.50
潮差 tidal range
最高天文潮位和最低天文潮位之间的潮位差。
3.51
潮汐tides
由于天体引力产生的有规律且可预测的海洋运动。
3.52
塔架 tower
海上风力发电机组支撑结构的一部分,连接下部结构和风轮一机舱组件,参见图IO
3.53
海啸 tsunami
海底剧烈竖向运动引发的长周期海洋波浪波动。
3.54
单向(风和/或浪)uni-directional (Wind and/or WaVeS)
作用于单一方向。
3.55
水深 Water depth
海底和静水位之间的垂直距离。
注意:因为存在几种静水位(见3.44),会有几种不同的水深值。
3.56
波峰高度 WaVe CreSt elevation
波峰和静水位之间的垂直距离。
3.57
波向 WaVe direction
波浪传播的平均方向。
3.58
波高 WaVe height
一个向上跨零波中水面最高点和水面最低点之间的垂直距离。
3.59
波周期 WaVe PeriOd
形成一个上跨零波浪的两个上跨零点之间的时间间隔。
3.60
波谱峰频率 WaVe SPeCtral Peak frequency
波谱峰值能量的频率。
3.61
波谱 WaVe spectrum
某海况下海面高程的频域描述。
3.62
波陡 WaVe SteePneSS
波高与波长之比。
3.63
天气性停工期 Weather downtime
因环境条件恶劣而不能进行海上作业的一个或多个时间段。
3.64
天气性工作期 Weather WindoW
环境条件允许进行海上施工作业的时间间隔。
3.65
风廓线■■风切变定律 Wind PrOfile-Wind Shear IaW
风速随静水位以上高度变化的数学表达式。
注:通常应用的是对数廓线[见式(1)]或者籍律廓线[见式(2)]:
In(Z∕z0)
∙ln(z√zo)
V(Z) =V(Zr)・(j
式中:
V(N)^-高度N处的风速;
N ——平均海平面以上的高度;
Nr ——为拟合风廓线的平均海平面以上的高度;
——粗糙度长度;
Q ——风切变(或幕律)指数。
3.66
上跨零波 ZerO UP-CrOSSing WaVe
上跨零点之间的波高随时间变化的部分。在海面自下向上(而不是自上向下)经过静水面时,出现
上跨零点。
4符号和缩略语
为便于理解本标准的内容,除GB/T 18451.1规定的以外,还将使用以下符号和缩略语。
4.1符号和单位
|
AC |
査诺克常数 | |
|
d |
水深 |
[m] |
|
∕p |
波谱峰频率 |
Cs-] |
|
g |
重力加速度 |
[m∕s2] |
|
h |
海冰厚度 |
Cm] |
|
h N |
重现期为N年的海冰厚度 |
[m] |
|
龙m |
冬季冰冻情况下长期年平均最大冰厚 |
K |
|
H |
单个波高 |
[m] |
|
HB |
破碎波高 |
[m] |
|
HD |
设计波高 |
Cm] |
|
HN |
重现期为N年的单个波高 | |
|
HS |
有义波高 |
Cm] |
|
HSN |
重现期为N年的有义波高 |
[ɪn] |
|
H redN |
重现期为N年的折算波高 |
Cm] |
|
k |
波数 | |
|
K ʃɪ mzx |
累计冰冻期内的(度-日)数 |
EOCJ |
|
S |
海底坡度 |
∏ |
|
P (VhUb) |
轮毂高度处风速的概率密度函数 |
:-] |
|
S, |
单面波谱 |
[m2∕HZ] |
|
Ri |
构件抗力的设计值 |
C-J |
|
Rk |
构件抗力的特征值 |
[-1 |
|
Sd |
载荷效应的设计值 |
E-] |
|
Sk |
载荷效应的特征值 |
E |
|
t |
时间 |
Cs] |
|
T |
波周期 |
[s] |
|
TD |
设计波周期 |
[s] |
|
TP |
谱峰周期 |
[s] |
|
TZ |
平均跨零波周期 |
[s] |
|
USS |
次表层流流速 |
[m∕s] |
|
UW |
风生流流速 |
[m∕s] |
|
ɛʃbw |
破碎波引起的表层流流速 |
[m∕s] |
|
VN |
重现期为N年的预期极端风速(10 min平均值) |
[m∕s] |
|
VredN |
重现期为N年的折算极端风速(3 s平均值) |
[m∕s] |
|
7 |
相对于静水位的海面高度 |
Cm] |
|
K |
冯•卡门常数 | |
|
λ |
波长 |
[m] |
|
九 |
波向 |
[。] |
|
a U Wm |
平均波向 |
O |
|
流向 |
:°] | |
|
海面高度的标准偏差 |
[m] | |
|
τ |
温度 |
[°C] |
|
4.2缩略语 | ||
|
COD |
同向 | |
|
CPT |
静力触探试验 | |
|
DLC |
设计载荷工况 | |
|
ECD |
方向变化的极端相干阵风 | |
|
ECM |
极端流模型 | |
|
EDC |
极端风向变化 | |
|
EOG |
极端运行阵风 | |
|
ESS |
极端海况 | |
|
EWH |
极大波高 | |
|
EWLR |
极端水位范围 | |
|
EWM |
极端风速模型 | |
|
EWS |
极端风切变 | |
|
HAT |
最高天文潮位 | |
|
LAT |
最低天文潮位 | |
|
MlC |
微生物腐蚀 | |
|
MlS |
方向偏差 | |
|
MSL |
平均海平面 | |
|
MUL |
多向 | |
|
NCM |
正常流模型 | |
|
NSS |
正常海况 | |
|
NTM |
正常湍流模型 | |
|
NWH |
正常波高 | |
|
NWLR |
正常水位范围 | |
|
NWP |
正常风廓线模型 | |
|
RNA |
风轮一机舱组件 | |
|
RWH |
折算波高 | |
|
RWM |
折算风速模型 | |
|
SSS |
恶劣海况 | |
|
SWH |
极限波高 | |
|
SWL |
静水位 | |
|
UNI |
单向 |
5基本要求
5.1概述
5.2〜5.5中给出的工程技术要求是为了保证海上风力发电机组结构、机械系统、电气系统和控制系 统的安全。这些技术要求适用于风力发电机组的设计、制造、安装、运行维修手册及相关的质量管理过 程。此外,还考虑了海上风力发电机组安装、运行和维护中所要求的各种安全规程。
5.2设计方法
本标准要求应用结构动力学模型预测设计载荷。该模型可确定与外部条件(第6章规定)和设计状 态(第7章规定)所有组合相关的载荷效应。本标准定义了最少的相关组合作为设计载荷工况。
海上风力发电机组支撑结构的设计应基于特定场址的外部条件,并与第12章中所规定的要求保持 一致。上述条件应作为设计依据。
若海上风力发电机组风轮-机舱组件的最初设计基于GB/T 18451.1-2012中6.2所规定的标准等 级,则应证明海上特定场址的外部条件不会影响结构完整性。该证明应包括海上风力发电机组场址的 载荷和变形计算结果与初始设计计算结果之间的比较,同时考虑安全裕度、环境对结构抗力及所选材料 的影响。此外,载荷和变形的计算还应考虑特定场址的土壤性质对海上风力发电机组动力学特性的影 响,及由于海床运动和冲刷引起的潜在、长期的动力学特性变化。
海上风力发电机组的设计过程如图2所示。图中给出了设计过程的主要步骤以及在本标准中所对 应的相关章节。设计是一个反复的过程,应包含整个风力发电机组(包括支撑结构和风轮一机舱组件) 的载荷和载荷效应计算。仅当海上风力发电机组的结构完整性经由极限状态分析(见7.6)验证满足后, 方可结束结构设计过程。
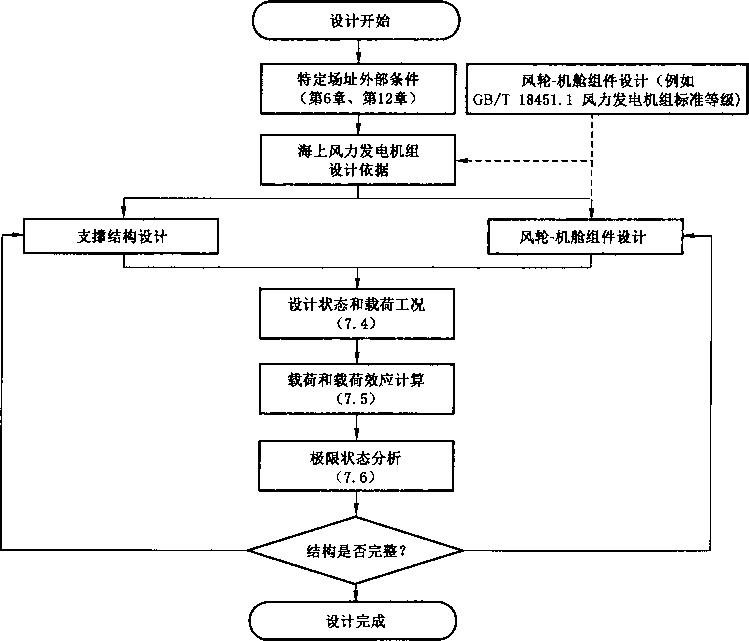
图2海上风力发电机组的设计过程
IO
全尺寸试验数据可用来提高预测设计值的可信度,并验证结构动力学模型和设计工况。关于全尺 寸试验的机械载荷测量相关导则参见IEC 61400-13o
应通过计算和/或试验来验证设计的合理性。如果釆用试验结果验证,则试验时的外部条件应符合 本标准中规定的特征值和设计状态。包括试验载荷在内的试验条件选择,应考虑相关的安全系数。
5.3安全等级
海上风力发电机组应根据下列两种安全等级之一进行设计:
・一般安全等级:当失效结果可导致人身伤害或造成经济损失和社会影响时,可釆用此等级;
•特殊安全等级:当根据地方法规和/或由制造商与用户协商来确定安全要求时,可釆用此等级。
本标准对风力发电机组一般安全等级的局部安全系数的详细描述见7.60
特殊安全等级的局部安全系数应由制造商与用户协商制定。根据特殊安全等级设计的海上风力发 电机组,即为6.2中所规定的S级风力发电机组。
5.4质量保证
质量保证是海上风力发电机组及其零部件设计、釆购、制造、安装、运行和维护的组成部分。
质量管理体系宜遵照GB/T 19001的要求。
5.5风轮-机舱组件铭牌
至少以下内容应显著标示在永久性的风轮-机舱组件铭牌上:
•制造商和国家;
•型号和产品编号;
•生产日期;
•额定功率;
•参考风速Vref;
•轮毂高度处的运行风速范围Vin-VoUl;
•工作环境的温度范围;
• IEC风力发电机组等级(见GB/T 18451.1);
•风力发电机组输出端额定电压;
•风力发电机组输出端频率或标称变化大于2%时的频率范围。
6外部条件
6.1概述
在海上风力发电机组设计中,应考虑本章规定的外部条件。
海上风力发电机组受限于可能影响其载荷、使用寿命和运行的环境与电气条件。为了保证适当的 安全性和可靠性,设计中应考虑环境、电网和地质等参数,并应在设计文件中予以明确规定。
环境条件划分为风况、海洋条件(波浪、海流、水位、海冰、海生物、海床运动和冲刷)和其他环境条 件。电气条件指电网状况。
应考虑场址的土壤特性,包括由于海床运动、冲刷和其他海床不稳定因素所引起的土壤特性随时间 的变化。
尽管海洋条件会对某些涉及支撑结构动力特性的载荷工况有影响,但风况是确定风轮-机舱组件结 构完整性的基本外部条件。在所有情况下(包括海洋条件在风轮-机舱组件设计中忽略不计的情况)论 证结构完整性时均应适当考虑每个特定场址(即海上风力发电机组拟安装地点)的海洋条件。
其他环境条件也会影响设计特性,如控制系统功能、耐久性、腐蚀等。
外部条件可分为正常外部条件和极端外部条件。正常外部条件通常涉及重复出现的结构载荷条 件,而极端外部条件则代表罕见的外部设计条件。设计载荷工况应包括这些外部条件在海上风力发电 机组不同运行模式及其他设计条件下可能的临界组合。
6.2〜6.6规定了设计中应考虑的正常外部条件和极端外部条件。
6.2风力发电机组等级
设计中需考虑的外部条件取决于海上风力发电机组场址类型。在GB/T 18451.1中,风力发电机 组等级由风速和湍流参数定义,该等级涵盖绝大部分的陆上风电应用。
对于海上风力发电机组,根据风速和湍流参数定义的风力发电机组等级仍可作为风轮-机舱组件的 设计依据。
若设计者或用户要求特殊的风况、其他外部条件或特殊的安全级别(见5.3),则需另外定义风力发 电机组等级,即S级。
对于海上风力发电机组设计,除定义风力发电机组等级的风速和湍流强度外,还需引入其他重要参 数,尤其是海洋条件参数,以形成完整的外部条件。上述其他参数值的选取见6.3、6.4、6.5和6.6的 规定。
设计寿命应至少为20年。
制造商应在设计文件中说明所使用的模型和主要设计参数的取值。当釆用第6章中的模型时,对 参数取值应作详细说明。设计文件应包含附件A中所列资料。
6.4中各标题后括号内添加缩略语,用于描述7.4所定义的设计载荷工况的风况。
6.3 风况
风况是海上风力发电机组设计的基础,海上风力发电机组应按能够安全承受各种风况载荷来设计。
从载荷和安全角度考虑,风况可分为海上风力发电机组正常运行期间频繁出现的正常风况,和重现 期为1年或50年的极端风况。
海上风力发电机组支撑结构应依据机组所在场址的典型风况进行设计,该典型风况应根据第12章 要求进行评估。
对于风轮-机舱组件,设计考虑的风况可为特定场址风况或是由GB/T 18451.1中模型和参数值定 义的风况。对于后者,应证明特定场址的外部条件不会影响结构的完整性。当使用GB/T 18451.1规 定的风况作为风轮-机舱组件的设计依据时,则应考虑以下模型和参数的特例情况:
•平均气流与水平面夹角为0°;
•风廓线V(Z)表示平均风速为距静水位高度Z的函数。对于风力发电机组的标准等级,正常风 廓线应按赛律给出,见式(3):
式中对于正常风况,藉律指数α可取0.14o
假定极端风速Ve5o ʃei(3 S的平均值)和极大波高H50.H1的出现无关联,且其组合是保守的。则 极大波高应与下列折算极端风速(RWM)[见式(4)、式(5)]联合使用。
Vredso (Z) = 1.1Vref(Z∕zhub)0∙11
6.4海洋条件
海洋条件是海上风力发电机组设计的基础,海上风力发电机组应按能承受各种海洋条件来设计。 本节所描述的海洋条件包括波浪、海流、水位、海冰、海生物、海床运动和冲刷。与海上环境有关的其他 12
外部条件见6.5o
海上风力发电机组支撑结构应基于环境条件进行设计,包括海上风电机组场址典型海洋条件。
设计者应考虑海洋条件对风轮-机舱组件的影响。大多数情况下海上风力发电机组风轮-机舱组件 的设计需适应较宽范围的海洋环境,而非仅符合某特定场址。因此设计者可假定一个和海上风力发电 机组拟安装环境同样恶劣的通用海洋条件。基于支撑结构的动力学特性和假定的设计海洋条件,釆用 合适的分析方法,设计者有时会论证出海洋条件对风轮-机舱组件结构完整性的影响可忽略不计。
从载荷和安全考虑,海洋条件可分为正常海洋条件和极端海洋条件。正常海洋条件指海上风力发 电机组正常运行期间较1年重现期更为频繁的海洋条件。极端海洋条件则定义为具有1年重现期或 50年重现期°的海洋条件。
6.4.1波浪
波浪的形状不规则,高度、长度和传播速度也变化不定,并可从一个或多个方向同时接近海上风力 发电机组。反映真实海洋特性的最佳方法是通过随机波浪模型来描述海况。该随机波浪模型由多个小 的单频率分量叠加而成,每个分量均为具有独立振幅、频率和传播方向的周期性波浪。这些波浪分量间 具有随机相位关系。设计海况由波谱S、有义波高H,、谱峰周期TP和平均波向Og共同描述。其中, 适当情况下波谱可由方向分布函数来补充。标准波谱公式参见附录BO
在一些应用中,为设计需要,可将周期波浪或规则波浪作为真实海况的抽象模拟。确定性设计波浪 应由波高、周期和方向予以描述。
在海上风力发电机组的设计中,应考虑风况和海浪的相关性。应根据如下参数的长期联合概率分 布考虑上述相关性:
•平均风速V;
•有义波高H,;
•谱峰周期Tp。
上述参数的联合概率分布受当地场址条件的影响,例如风区、水深、海底地形等。因此应根据适当 的长期测量结果,通过追算法确定概率分布,见12.4o
正常风况和波浪的相关性也包含平均风向和波向。某些情况下,风向和波向的分布(多方向)会对 作用在支撑结构上的载荷有重要影响。影响的大小取决于风和浪的方向性,以及支撑结构的对称性。 某些情况下,设计者可以通过适当的分析证明釆用风和浪同向,且从最恶劣的单一方向作用于支撑结构 设计的假定是保守的、可接受的。各种设计载荷工况下所考虑的风和波浪的假定方向见7.4。
当考虑风和波浪的方向偏差时,应确保方向数据和风力发电机组建模技术是可靠的,见7.5。
以下波浪模型根据随机海况和规则设计波定义。其中,随机海况模型应基于适合海上风力发电机 组预期场址的波谱。
6.4.1.1 正常海况(NSS)
对于每个正常海况,应在适合于预期场址的海洋气象参数的长期联合概率分布的基础上选择有义 波高、谱峰周期和方向以及相关的平均风速。
计算疲劳载荷时,应确保所考虑的正常海况的数目和分辨率能充分说明疲劳损伤,该损伤与海洋气 象参数的整个长期分布有关。
对于极限载荷计算,除了 7.4.1描述之外,正常海况应由有义波高HS的期望值来定性描述,其取决 于平均风速的给定值。设计者应考虑适合每个有义波高的谱峰周期TP的范围。设计计算应釆用导致 最大载荷作用于海上风力发电机组的谱峰周期值。
1) ■本标准中正常水位范围定义为1年重现期的水位变化,见6.4.3.1o
6.4.1.2 正常波高(NWH)
假定正常确定性设计波的波高HNWH等于给定平均风速条件下的有义波高期望值Hs,NSSo
设计者应对每个正常波高设定合适的波周期T范围。与正常波高联合使用的波周期可在下列范 围内选取:
11.1 √Hs,NSS(V)/g ≤ T≤ 14.3√Hs,NSS(V)/g ........................( 6 )
基于正常波高的设计计算应假定波周期值在导致海上风力发电机组作用有最大载荷的周期范 围内。
6.4.1.3 恶劣海况(SSS)
对于海上风力发电机组发电期间的极限载荷计算,应考虑恶劣随机海况模型与正常风况的组合。 恶劣海况模型综合了恶劣海况与相应发电范围内的各个风速。各个恶劣海况的有义波高HMSS(V)通 常应由合适特定场址的海洋气象数据外推确定,其有义波高和风速的组合应具有50年的重现期3>。对 所有风速,50年重现期的无条件极大有义波高H而可作为H“Sss(V)的保守值。
设计者应对各个有义波高考虑合适的谱峰周期TP范围。在此范围内,设计计算应采用导致最大 载荷作用于海上风力发电机组的谱峰周期值。
6.4.1.4 极限波高(SWH)
计算海上风力发电机组发电时的极限载荷应考虑恶劣情况下确定性设计波浪和正常风况的组合。 极限波高模型将极限波高和可发电范围内的每个平均风速相联系。极限波高HSWH(V)通常应由适当 场址特定海洋气象数据外推来确定,使其有义波高和风速的组合具有50年的重现期4>。对于所有的平 均风速,50年重现期的无条件极大波高Hs。可作为HSWH(V)的保守值。 -
设计者应考虑适合于每个极限波高波周期T的范围,与极限波高结合使用的波周期范围可由式
(7)确定:
11.1 √Hs.sss (V)∕g ≤ T ≤ 14.3√Hs,sss(V)∕g ........................( 7 )
基于极限波高的设计计算应假定波周期值在导致最大载荷作用于海上风力发电机组的波周期范 围内。
6.4.1.5 极端海况(ESS)
极端随机海况模型应同时考虑50年重现期的极大有义波高H,m和1年重现期的极大有义波高 WSlo H部和H"的值应通过对海上风力发电机组场址的测量结果和/或追算来确定,见12.4o设计者 应分别考虑适合于H部和H时的谱峰周期TP的范围。设计计算应釆用导致最大载荷作用于海上风力 发电机组的谱峰周期值。
缺少极端风况与极端波况的长期联合概率分布资料时,应假定50年重现期的10 min极端平均风 速发生在50年重现期的3 h极端海况下。同样的假设可以应用在1年重现期的10 min极端风速和3 h 极端海况的组合。
2) 波周期具有一个与深度有关的下限值,其由破碎波高的极限值确定,参见附录CO
3) 建议海洋气象数据的外推釆用所谓的“反向一阶可靠度分析方法(IFORM)\附录G介绍了如何用该方法从 特定场址的环境条件中确定HSSSS(V)的说明。
4) 恶劣海况模型见6.4.1.3,建议使用附录H所述的IFORM方法,附录H还给出如何由Hs,sss(V)确定HSWH(V) 的方法。
6.4.1.6极大波高(EWH)
对于极端确定性设计波,应考虑50年重现期的极大波高H"和1年重现期的极大波高HIO H50 和HI及相关的波周期值,可通过对海上风力发电机组场址的适当测量分析来确定,见12.4。若假设波 高符合瑞利分布,则可认为:
H50 = 1.86Hs50 ..............................( 8 )
H1 = 1.86HSI ..............................( 9 )
式中有义波高Hs5。和Ha是3 h基准期的值。与上述极大波高联合使用的波周期可在下列范围内取值:
11∙1 JH"SS(V)/g W T ≤ 14.3√Hs.ESS(V)/g ........................( 10 )
基于极大波高的设计计算应取波周期值在导致最大载荷作用于海上风力发电机组的波周期范 围内。
对于浅水场址,极大波高H50, H1及相关的波周期,可通过对适当的特定场址测量分析来确定。 当无法测量,且破碎波波高小于从上述瑞利分布公式中得出的Hs。和HI值时,应取Hs。和Hl等于破 碎波波高。附录C给出根据场址条件确定破碎波性质和大小的规范,也提供了用在浅滩波高分布的经 验模型。
6.4.1.7 折算波高(RWH)
折算确定性设计波应同时考虑50年重现期的折算波高。和1年重现期的折算波高Hledi O确 定H&5。和的值时,应假定其与3 s极限风速(Ve5o,Vei)同时发生的组合与其和极大波高(H”, Hl)及折算极限风速(Vredso, Vredι)的组合具有相同的出现概率。
Hrcd50. H red!和相关的波周期值可以通过分析海上风力发电机组场址适当实测数据来确定,见12.4。 也可假设波高符合瑞利分布,则:
Hred50 =1.3HSso ..............................( H)
Hredl = 1.3HSl ..............................( 12 )
其中,有义波高H部和H时是3 h基准期的值。
考虑10 min平均风速随机变化和单个波高变化的联合概率统计,可推出以上关系。在推导过程 中,假设风速变化符合高斯概率分布而波高符合瑞利分布。由于出现破碎波,波高的瑞利分布不适于浅 水场址。对于浅水场址,折算波高HledS^Hledi和相关的波周期可通过对特定场址的适当实测数据分析 来确定。如果无法进行这些测量,且破碎波高小于由瑞利分布确定的5。和HrM ,则可假定HraI5。和 H硕与破碎波高相同。附录C提供了一种浅滩波高分布的经验模型。
6.4.1.8破碎波
在海上风力发电机组设计中应评估破碎波的影响。破碎波分为崩碎波、卷碎波或激碎波,前两种类 型与海上风力发电机组场址有关。水深、海底坡度和波周期决定浪花是崩碎波还是卷碎波。
浅水区水动力学以及场址特性对破碎波的特性和尺寸的影响参见附录CO破碎波引起的海上风力 发电机组支撑结构载荷计算参见附录DO
6.4.2海流
理论上海流在空间和时间上不断变化,但一般认为海流是定常速度和方向的水平均匀流场,仅随深 度而变化。海流速度应考虑下列分量:
•由潮汐、风暴潮和大气压力变化等引起的次表层流;
•风生近表层流;
•由近岸波浪生成的与海岸平行的表层流。
总流速是上述分量的矢量和。波浪引起的水质点速度应和流速矢量叠加。海流对波长和波周期间 关系的影响一般很小,可忽略。
当总流速与波浪引起的波峰水质点速度相比很小时,且涡流脱落或浮冰移动不可能使支撑结构产 生振动的情况下,海流对海上风力发电机组水动力疲劳载荷的影响可忽略。应通过对特定场址数据的 适当评估,来确定海流对疲劳载荷计算的影响是否可忽略。
6.4.2.1次表层流
次表层流分布可用水深a的幕公式表示,其中流速USS(Z)是静水位以上高度Z的函数:
USSCZ)=USS(0) ∙ i(z+d')∕d3y7 ..............................( 13 )
重现期为1年和50年的表层海流速UsS(O)值,可通过对海上风力发电机组场址的适当测量分析来 确定,见12.50
通常可假设次表层流与波向一致。
6.4.2.2风生近表层流
风生流可用速度UW(Z)的线性分布来表示,该速度从海表层的UW(O)减少到静水位以下20 m深 处的零值:
UW(Z)=UW(O) ∙ (l + z∕20) ..............................( 14 )
在水深小于20 m的场址,海底的风生流速为非零。
风生表层海流流速可假定与风向一致,并可按式(15)估算:
UW(O) = 0.01 VlhOUr(Z = 10 m) ..............................( 15 )
式中:
VlhOUr (z = 10 m)--在静水位以上10 m高度处风速的1 h平均风速,单位为米每秒(m∕s)。
重现期为1年和重现期为50年的VIhOUr(Z = IO m)值,可通过对海上风力发电机组场址的适当测量 分析来确定。再用这些风速和上式一起估算1年和50年重现期的风生表层海流流速。
6.4.2.3破碎波生成的表层流
当风力发电机组安装在海岸破碎波区时,应该考虑由破碎波剪应力产生的表层流。
在考虑波浪和海流全耦合的情况下,可运用适合的数值模型(如BOUSSineSq)来确定破碎波生成的 表层流值。对于方向与海岸线平行的近岸表层流,破碎波区的设计流速UbW可按式(16)估算:
UbW =2sVzgHB ..............................( 16 )
式中:
HB --破碎波高;
S —海底坡度;
g——重力加速度。
破碎波高可根据附录C中描述的场址特征进行估算。
6.4.2.4正常流模型(NCM)
正常流模型指适当的特定场址的风生流和对应正常波况下破碎波生成的表层流(如有时)的组合。 正常流模型不包括潮汐和风暴生成的次表层流。
包含正常波况和恶劣波况(NSS、NWH、SSS、SWH)的极限载荷工况,应釆用正常流模型。对于每 种载荷工况,风生流流速可根据相应的平均风速来估算,见6.4.2.2o
6.4.2.5极端流模型(ECM)
极端流模型指适当特定场址的重现期为1年和50年的次表层流、风生流以及破碎波生成的表层流 的组合。
包含极端波况或折算波况(ESS、EWH、RWH)的极限载荷工况应釆用极端流模型。对于上述载荷 工况应假定海流与波浪具有相同的重现期。
6.4.3水位
计算海上风力发电机组的水动力载荷时,若场址的水位变化范围较大,应考虑其对计算载荷的影 响。对于包含正常波况(NSS, NWH)的极限载荷工况,可采用等于平均海平面(MSL)的恒水位(6.4.3.1 中规定的除外)。
图3表示了不同的水位。
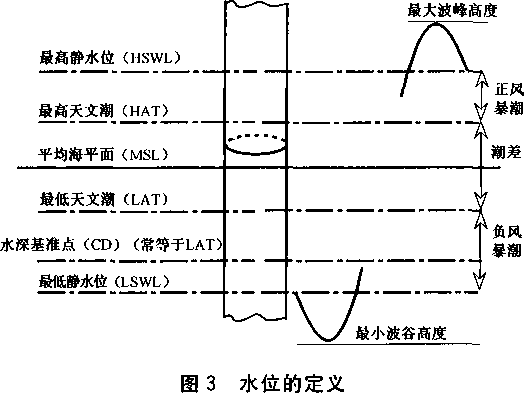
6.4.3.1正常水位范围(NWLR)
正常水位范围应假定为1年重现期的水位变化范围。在缺乏特定场址的长期水位概率分布数据 时,应假定正常水位范围为最高天文潮(HAT)和最低天文潮(LAT)之间的变化范围。
若基于海况和风速联合概率分布(Hs, Tp, Vhub)的正常海况模型(NSS)用于疲劳和极限载荷工况 时,应采用正常水位范围(NWLR)O用于下列条件的极限载荷工况也应采用正常水位范围(NWLR):
・恶劣海况模型(SSS)和极限波高模型(SWH);
•重现期为1年的波况。
极限载荷计算应基于正常水位范围(NWLR)内产生最大载荷的水位,或对正常水位范围(NWLR) 内水位概率分布的合理考虑。
对于恶劣随机海况(SSS)和极限波高(SWH)模型相关的极限载荷工况,正常水位范围(NWLR)内 的水位可能使波高受到深度限制。为避免波高受到深度限制,应釆用极端水位范围(EWLR)内的较高 水位。
对于水动力疲劳载荷计算,在某些工况下,设计者可通过适当的分析来证明水位变化对疲劳载荷的 影响可忽略,或者通过保守的方式,即釆用大于或等于平均海平面的恒定水位来说明。
6.4.3.2极端水位范围(EWLR)
对于与50年重现期的波况相关的极限载荷工况,应采用极端水位范围。在此范围内,载荷计算应 基于对海上风力发电机组产生最大载荷的水位。对于水动力载荷、冰载荷和支撑结构浮力的计算,应分 别确定相应的设计水位。
若缺少海洋气象参数(包括水位)的长期联合概率分布,设计计算应至少基于下列水位:
・ 基于最高天文潮和正向风暴潮适当组合的50年重现期的最高静水位;
•基于最低天文潮和逆向风暴潮适当组合的50年重现期的最低静水位;
•与最高破碎波载荷有关的水位。
6.4.4 海冰
在某些区域,海冰可对海上风力发电机组的支撑结构产生决定性的载荷。冰载荷可能是固定冰盖 产生的静载荷,或是在风和流作用下浮冰运动所产生的动载荷。若浮冰在较长时间内不断撞击支撑结 构,则可产生很大的疲劳载荷。应根据12.7的规定,对特定场址海冰的出现和特性进行评估。
附录E提供了关于冰载荷计算的指南。
6.4.5海生物
海生物影响海上风力发电机组支撑结构的质量、几何形状和表面状态,进而可影响支撑结构的水动 力载荷、动态响应、可达性和腐蚀速率。
某些区域内,海生物可能大量存在,应在支撑结构的设计中予以考虑。
海生物大体上分为“硬性”(通常为动物类如贻贝和藤壶)和“软性”(海草和海藻),其中硬性海生物 相比软性海生物较薄,但更粗糙。通常结构安装后海生物在其上迅速繁殖,但在几年后会逐渐停止 生长。
海生物的特性和厚度不仅取决于结构件相对于海平面的位置、相对于海流的主方向、寿命和维护策 略,同样也取决于其他场址条件,如盐度、氧含量、PH值、海流和温度。
在支撑结构的全浸区上部和飞溅区下部区域内,海生物通常可改变腐蚀环境,加快或延迟腐蚀,结 果取决于海生物的类型和其他局部条件。海生物(例如通过腐蚀性的代谢物)加快腐蚀的过程一般可参 考“微生物腐蚀,,(MIC)o海生物可能会进一步干扰腐蚀控制系统,如涂层/衬套和阴极保护。
由于有关海生物的假设具有不确定性,因此检査策略和海生物移除应作为支撑结构设计的一部分。 海生物的检査频率、检查方法和移除标准应基于海生物对海上风力发电机组结构可靠性的影响,以及当 前特定场址条件下对海生物处理经验的丰富程度。
6.4.6海床运动和冲刷
海上风力发电机组支撑结构的设计应考虑海床运动和冲刷的影响。海床运动和冲刷的分析以及适 当的保护设计应符合ISO 19901-4的要求。有关海床条件评估的要求见12.9o
6.5其他环境条件
除风和海洋条件之外,其他环境(气候)条件能通过热、光、腐蚀、机械、电气或其他物理作用影响海 上风力发电机组的完整性和安全性,且与气候因素共同作用会加剧这种影响。
至少还应该考虑下列其他环境条件,并在设计文件中说明相应的措施:
•气温;
•湿度;
•空气密度;
•太阳辐射;
•雨、冰雹、雪、冰;
•化学作用物质;
•机械作用颗粒;
•盐分腐蚀;
•雷电;
・地震;
•水密度;
•水温;
•交通。
设计中考虑的气候条件可依照标准值或气候条件变化范围来确定。选择设计值时,应考虑诸多气 候条件同时出现的可能性。
对应重现期为1年或更频繁的正常范围内气象条件变化,应不影响海上风力发电机组的正常运行。
除相关因素外,6.5.2中其他极端环境条件应与GB/T 18451.1的正常风况和6.4的正常海洋条件 相组合。
6.5.1其他正常环境条件
应考虑的其他正常环境条件为:
• 环境气温范围:一 10 °C~+40 °C;
•相对湿度达100%;
•太阳辐射强度J 000 W∕m2i
• 空气密度:1.225 kg/m3;
• 水密度:1 025 kg∕m3 ;
• 水温范围5, :0 0C~ + 35 OCo
设计者指定其他附加外部条件,则所用参数及其取值应在设计文件中加以说明,并应满足 IEC 60721-2-1 的要求。
6.5.2其他极端环境条件
海上风力发电机组设计中应该考虑的其他极端环境条件有温度、雷电、冰和地震。
6.5.2.1 温度
对于标准安全等级的海上风力发电机组,极端气温范围至少应在一20 °C〜+ 50 °C。
6.5.2.2 雷电
GB/T 18451.1中的雷电防护要求适用于标准等级的海上风力发电机组。
6.5.2.3 覆冰
对于标准等级的海上风力发电机组,未给定冰的最低要求。在风力发电机组部件上的覆冰应从下 述内容予以考虑:
• 温度在0 °C和0 °C以下的水气和碎冰;
•温度在0 °C以下的波峰飞溅。
6.5.2.4 地震
对于标准等级的海上风力发电机组,未给定地震的最低要求。有关地震条件和影响的考虑见 GB/T 18451.10
6.6电网条件
以下列出了海上风力发电机组输出端应考虑的正常条件。
5)环境温度和水温应该为Ih平均值。
当相关参数在下述范围内时,应釆用正常电网条件:
• 电压:额定值(参见IEC 60038) + 10%;
•频率:额定值士 2%;
•三相电压不平衡度(电压负序分量的比值):不超过2%;
•自动重合闸的时间间隔:应考虑第一次失电后的重合时间间隔为0.1 s~5 S和第二次失电后的 重合时间间隔为10 s~90 s;
•断电:假定一年内电网断电20次,断电持续时间不超过6 可认为是正常工况。而断电持续3 个月则应视为极端工况。
7结构设计
7.1概述
应验证海上风力发电机组承载零部件的结构完整性,并确保其具有可接受的安全等级。结构部件 的极限强度和疲劳强度应通过计算和/或试验来验证,以表明海上风力发电机组的结构完整性具有适当 的安全等级。
结构分析应基于ISO 2394进行。
应釆用适当的方法进行计算,在设计文件中应提供计算方法的说明。这些说明应包括计算方法有 效性的证据,或相应验证研究的参考文献。所有强度验证试验中的载荷水平应与7.6中适合特征载荷 的安全系数相对应。
7.2设计方法
应验证风力发电机组的极限状态未超出设计范围,模型试验和样机试验也可代替计算来验证结构 设计的合理性,如ISO 2394的规定。
7.3载荷
设计计算中应考虑7.3.1-7.3.6所列出的载荷。
7.3.1重力和惯性载荷
重力和惯性载荷分别是由于地球引力、振动、旋转和地震作用所产生的静态和动态载荷。
7.3.2空气动力载荷
空气动力载荷是由气流及气流与风力发电机组各部分的相互作用所引起的静态和动态载荷。
气流特性取决于穿过风轮平面的平均风速和湍流、风轮转速、空气密度、风力发电机组部件的气动 外形以及它们之间的相互作用,包括气动弹性效应。
7.3.3驱动载荷
驱动载荷由风力发电机组的运行和控制所产生。它可分为几类,包括发电机/变流器的扭矩控制, 偏航和变浆机构的破动载荷,以及机械制动载荷。每种情况下,在计算响应和载荷时,考虑驱动力有效
6)假定断电持续6 h对应于风暴恶劣阶段的持续时间。 范围是非常重要的。尤其是对于机械制动器,在任何制动过程中,检查响应和载荷时都应考虑易受温度 和老化影响的摩擦力、弹力或压力的范围。
7.3.4水动力载荷
水动力载荷是由水流及其与海上风力发电机组支撑结构相互作用所引起的动力载荷。
水动力载荷由水流运动、水密度、水深、支撑结构形状及其与水流相互作用(包括水力弹性作用)所 确定。
对于设计中未考虑承受水动力载荷的海上风力发电机组部件,其安装位置应与预期的最大波峰高 度(50年重现期)保证最小距离。其中应考虑最高天文潮位、正风暴潮、极端波峰高度和支撑结构运动 的影响。最小距离,即气隙,规定为0∙2H,κ>,但不小于1 m0
应考虑由于浪涌而产生的水动力载荷,尤其是对于附属装置的设计。
7.3.5海冰载荷
作用于海上风力发电机组的海冰载荷有静力载荷和动力载荷。静力载荷由温度波动或固定冰盖中 水位的变化引起。而动力载荷由风和水流引起的浮冰运动及其与支撑结构连接处的撞击产生。
在海或湖中,设计支撑结构相关的冰载荷取决于海上风力发电机组场址的特定位置和特征。海冰 载荷的有关计算参见附录E。
7.3.6其他载荷
其他可能产生的载荷,如尾流载荷、冲击载荷、冰载荷等均应适当予以考虑。
还应根据GB/T 18451.1适当地考虑地震载荷。此外,地震(海啸)可能引起的巨浪所产生的水动 力载荷,也应考虑在内。
还应适当地考虑由于内外压力以及浮力所引起的作用于支撑结构上的水动力载荷。
7.4设计状态和载荷工况
本条款介绍了海上风力发电机组的设计载荷工况,并规定了设计中应考虑的最少载荷工况要求。
为便于设计,本标准以涵盖绝大多数典型工况条件的一系列设计状态,来表述海上风力发电机组 寿命。
载荷工况应由运行模式或其他设计工况(如特定的装配、吊装或维护条件)与外部条件的组合来确 定。应将具有合理发生概率的各相关载荷工况与控制和保护系统动作结合在一起考虑。用于验证海上 风力发电机组结构完整性的设计载荷工况,应由下列组合进行计算:
•正常设计状态和相应的正常外部条件或极端外部条件;
•故障设计状态和相应的外部条件;
•运输、安装和维护设计状态和相应外部条件。
如极端外部条件和故障工况之间存在相关性,则应将两者的实际组合作为一种设计载荷工况。
在每种设计状态中,应考虑几种设计载荷工况。表1列出了至少应考虑的设计荷载情况。表中每 种设计状态都通过对风况、海况、电气和其他外部条件的描述规定了设计载荷工况。另外,若海上风力 发电机组安装在可能出现海冰的场址时,还应考虑表2中的载荷工况。
在具有确定性风模型的设计载荷工况中,若控制器能使海上风力发电机组在达到最大偏航角和/或 最大风速前停机,则须证明在与上述确定性风况相同的湍流条件下,风力发电机组也能安全停机。
在特定的风力发电机组设计中,还应考虑其他与结构完整性相关的设计载荷工况。
表1中,对每种设计工况用“F”和“U”注明了相应的分析类型。“F”表示疲劳载荷分析,用于疲劳强 度评估;“U”表示极限载荷分析,如有关材料强度、叶尖变形和结构稳定性的分析。
表1设计载荷工况
|
设计 工况 |
DLC |
风况 |
波浪 |
风和波浪方向性 |
海流 |
水位 |
其他情况 |
分析 类型 |
局部安全系数 |
|
1.发电 |
1.1 |
NTM VrinWhUbwOUt RNA- |
NSS HS=E[Hs ∣Vhub] |
同向,单向 |
NCM |
MSL |
风轮-机舱组件上极端载荷的 外推______ |
U |
N(1.25) |
|
1.2 |
NTM Vin <Vhub< Vout |
NSS H 八 TFlVhUb 的联合概率分布 |
同向,多向 |
无海流 |
NWLR 或 ≥MSL |
F |
* | ||
|
1.3 |
ETM Vin < Vhub <Voul |
NSS Hs = E[Hs∣Vhub] |
同向,单向 |
NCM |
MSL |
U |
N | ||
|
1.4 |
ECD VhUb=Ur一2 m∕s, VrVr+ 2 m/S |
NSS (或 NWH) HS = E[HSlVhUb] |
偏向,风向变化 |
NCM |
MSL |
U |
N | ||
|
1.5 |
EWS Viπ < Vhub < Voul |
NSS (或 NWH) HS = EilHSMUb] |
同向,单向 |
NCM |
MSL |
U |
N | ||
|
1.6a |
NTM Vin <Vhub< Vout |
SSS HS = HS,sss |
同向,单向 |
NCM |
NWLR |
U |
N | ||
|
1.6b |
NTM VinVVhUbVKUt |
SWH H = HSWH |
同向,单向 |
NCM |
NWLR |
U |
N | ||
|
2.发电 和有故障 |
2.1 |
NTM ⅛π <Vhub< Vout |
NSS Hs = E[Hs ∣Vhuh] |
同向,单向 |
NCM |
MSL |
控制系统故障或电网连接中断 |
U |
N |
|
2.2 |
NTM Vin < Vhuh <Voul |
NSS Hs = ECHJVhuJ |
同向,单向 |
NCM |
MSL |
保护系统或内部电气故障 |
U |
A | |
|
2.3 |
EOG VhUb=Vr ±2 m/s 和 VOUt |
NSS(或 NWH) HS = E[H」VhUb ] |
同向,单向 |
NCM |
MSL |
外部或内部电气故障,包括 ____电网连接中断 |
U |
A | |
|
2.4 |
NTM VinVVhUbVvOUt |
NSS HS = E[Hs IVm,] |
同向,单向 |
无海流 |
NWLR 或 ≥MSL |
控制系统、保护系统或电气 系统故障,包括电网连接中断 |
F |
* | |
|
3.启动 |
3.1 |
NWP VmVVhUbVVg |
NSS(或 NWH) HS=E[HM□ |
同向,单向 |
无海流 |
NWLR 或 2 MSL |
F |
* | |
|
3.2 |
~^EOG-VhUb =Vm, Vr+ 2 m/s 和 VOUt |
NSS(或 NWH) HS = E[Hs∣Vy] |
同向,单向 |
NCM |
MSL |
U |
N | ||
|
3.3 |
EDCl VhUb=Vm ,Vr ± 2 m/s 和 VOUl |
NSS(或 NWH) m = E[HjVhW |
偏向,风向变化 |
NCM |
MSL |
U |
N | ||
|
4.正常 停机 |
4.1 |
NWP VmVVhUbVVw |
NSS(或 NWH) HS = ECHSlVhUbl |
同向,单向 |
无海流 |
NWLR 或 ≥MSL |
F |
* | |
|
4.2 |
EOG Vhub=Vr + 2 m/s 和 VOUl |
NSS(或 NWH) HS-E[Hs ∣Vhub] |
同向,单向 |
NCM |
MSL |
U |
N |
3 一517—2015MEC 6-0∙"2009
23
|
设计 工况 |
DLC |
风况 |
波浪 |
风和波浪方向性 |
海流 |
水位 |
其他情况 |
分析 类型 |
局部安全系数 |
|
5.紧急 停机 |
5.1 |
NTM VUb=Vr± 2 m/s 和 VOUl |
NSS Hs = E[HJ Vhub] |
同向,单向 |
NCM |
MSL |
U |
N | |
|
6.停机 (静止或 空转) |
6.1a |
EWM (湍流风速模型) V hub “ 1 卩 ret |
ESS Hji =奴 H加 |
偏向,多向 |
ECM |
EWLR |
U |
N | |
|
6.1b |
EWM (稳态风速模型) V (ZhUb) = Ve5O |
RWH H=Hred50 |
偏向,多向 |
ECM |
EWLR |
U |
N | ||
|
6.1c |
RWM (稳态风速模型) V(ZhUb) =Vred50 |
EWH H = H5。 |
偏向,多向 |
ECM |
EWLR |
U |
N | ||
|
6.2a |
EWM (湍流风速模型) V hub =AVref |
ESS HS=力2 H厲O |
偏向,多向 |
ECM |
EWLR |
电网连接中断 |
U |
A | |
|
6.2b |
EWM (稳态风速模型) 卩(Z hub) =ve50 I |
RWH H = HredSO |
偏向,多向 |
ECM |
EWLR |
电网连接中断 |
U |
A | |
|
6.3a |
EWM (湍流风速模型) VhUb =妇 Vl |
ESS H$ =奴 H帛 |
偏向,多向 |
ECM |
NWLR |
极端偏航角误差 |
U |
N | |
|
6.3b |
EWM (稳态风速模型) V(ZhUb) =Vel |
RWH H = Hredl |
偏向,多向 |
ECM |
NWLR |
极端偏航角误差 |
U |
N | |
|
6.4 |
NTM Vhub<0.7Vref |
NSS H,, Tp, Vhub 的联合概率分布 |
同向,多向 |
无海流 |
NWLR 或 ≥MSL |
F |
⅛ | ||
|
7.停机 和有 故障 |
7.1a |
EWM (湍流风速模型) VhUb=力 IVI |
ESS Hs-⅛2Hsl |
偏向,多向 |
ECM |
NWLR |
U |
A | |
|
7.1b |
EWM (稳态风速模型) V(ZhUb) =Vel |
RWH H = HTedl |
偏向,多向 |
ECM |
NWLR |
U |
A | ||
|
7.1c |
RWM (稳态风速模型) V(ZhUb) =VredI |
EWH H = HI |
偏向,多向 |
ECM |
NWLR |
U |
A | ||
|
7.2 |
NTM Vhub<0.7Vref |
NSS Hs, Tp ,Vhub 的联合概率分布 |
同向,多向 |
无海流 |
NWLR 或 ≥ MSL |
F |
* |
GB、T 31517—2015/IEC 61400,3“2009
表1 (续)
|
设计 工况 |
DLC |
风况 |
波浪 |
风和波浪方向性 |
海流 |
水位 |
其他情况 |
分析 类型 |
局部安全系数 |
|
8.运输、 安装、维 护和修理 |
8.1 |
由制造商规定 |
U |
T | |||||
|
8.2a |
EWM (湍流风速模型) VhUb=^IVrI |
ESS HS=如 HSl |
同向,单向 |
ECM |
NWLR |
U |
A | ||
|
8.2b |
EWM (稳态风速模型) V(ZhUb)=VeI |
RWH H = Hredl |
同向,单向 |
ECM |
NWLR |
U |
A | ||
|
8.2c |
RWM (稳态风速模型) V(ZhUb) =Vredl |
EWH H = HI |
同向,单向 |
ECM |
NWLR |
U |
A | ||
|
8.3 |
NTM VhUb<0.7V 蔺 |
NSS Hs, Tp, Vhub 的联合概率分布 |
同向,多向 |
无海流 |
NWLR 或 ≥MSL |
安装期间没有接入电网 |
F |
* | |
315 一 7—2015/IEC 6 一 40'3 “ 2009
表1中所用的缩略语和符号:
|
COD |
同向(见6.4.1); |
NWH |
正常波高(见6.4.1.2); |
|
DLC |
设计载荷工况; |
NWLR |
正常水位范围(6.4.3.1); |
|
ECD |
方向变化的极端相干阵风(见GB/T 18451.1); |
NWP |
正常风廓线模型(见GB/T 18451.1); |
|
ECM |
极端流模型(见6.4.2.5); |
NSS |
正常海况(见6.4.1.1); |
|
EDC |
极端风向变化(见GB/T 18451.1); |
RWH |
折算波高(见6.4.1.7); |
|
EOG |
极端运行阵风(见GB/T 18451.1); |
RWM |
折算风速模型(见6.3); |
|
ESS |
极端海况(见6.4.1.5); |
SSS |
恶劣海况(见6.4.1.3); |
|
EWH |
极大波高(见6.4.1.6); |
SWH |
极限波高(见6.4.1.4); |
|
EWLR |
极端水位范围(见6.4.3.2); |
UNI |
单向(见6.4.1); |
|
EWM |
极端风速模型(见GB/T 18451.1); |
Vr+ 2 In/S |
应分析此范围内的所有风速的敏感度; |
|
EWS |
极端风切变(见GB/T 18451.1); |
F |
疲劳(见7.6.3); |
|
MlS |
偏向(见6.4.1); |
U |
极限强度(见7.6.2); |
|
MSL |
平均海平面(见6.4.3); |
N |
正常; |
|
MUL |
多向(见6.4.1); |
A |
非正常; |
|
NCM |
正常流模型(见6.4.2.4); |
T |
运输和吊装; |
|
NTM |
正常湍流模型(见GB/T 18451.1); |
* |
疲劳局部安全系数(见7.6.3)o |
标有“U”的设计工况,又分为正常(N)、非正常(A)、运输和吊装(T)三种类型。在海上风力发电机 组寿命期内,正常设计工况频繁出现,此时海上风力发电机组处于正常状态或仅出现微小的异常或故 障。非正常设计状态很少发生,通常对应安全系统功能启动的严重故障设计状态。设计状态的类型N、 A或T确定极限载荷所使用的局部安全系数山,这些系数在表3中给出。
当风速范围如表1所示时,应考虑对海上风力发电机组设计造成最不利条件的风速。风速范围可 用一组离散值表示,为确保计算的精度”,该组数据应足够多。在定义设计载荷工况时所参考的风况和 海洋条件在第6章已作岀相关说明。
计算作用于风轮-机舱组件上的载荷时,除了涉及平均风向瞬变的设计载荷工况(DLCl.4和 DLC3.3)外,通常可假定波浪始终与风同向,且均在单一方向8>作用。
计算支撑结构载荷时,除涉及平均风向瞬变的设计载荷工况(D LCI.4、DLC3.3)和对应于海上风力 发电机组停机(静止或空转)的设计工况外,可假定波浪与风同向。
在某些情况下,风和波浪的多方向性可根据支撑结构的非轴对称程度,对作用于其上的载荷产生重 要影响。对于表1中的某些设计载荷工况,载荷计算时可假定风和波浪来自最不利的方向(单向)。再 用计算出的与支撑结构方向定位相关的最不利载荷进行结构完整性验证。
各种设计载荷工况需考虑的平均或极端偏航角度误差,应遵循GB/T 18451.1的规定。偏航角误 差定义为风轮轴线方向偏离风向的水平夹角。
7.4.1 发电(DLCl.1~1.6)
该设计状态下,海上风力发电机组处于运行状态并有电力负载。海上风力发电机组总体布局应考 虑风轮不平衡的影响。设计计算中应考虑风轮制造中所规定的最大质量和气动不平衡(如叶片的变桨 角和扭转角偏差)。
此外,在分析运行载荷时应考虑与理论最佳运行状态的偏差,例如偏航误差和控制系统错误等。
DLCl. 1和DLCl.2包含了在海上风力发电机组寿命期内正常运行期间,对由大气湍流(NTM)和 随机海况(NSS)所引起的载荷要求。
DLCI.1仅用于计算作用在风轮-机舱组件上的极限荷载。DLCLl的计算应基于对随机海况和平 均风速范围内湍流多次模拟的载荷响应结果的统计外推。各单独海况的有义波高应取为相应平均风速 条件下有义波高的期望值。
对于DLC1.2,每种相关平均风速可对应一个有义波高。应确保所考虑的正常海况数目和分辨率能 充分说明与海洋气象参数长期全分布有关的疲劳损伤。在海洋气象参数的长期联合概率分布基础上, 为每种正常海况选择有义波高、谱峰周期、方向以及相应的平均风速。
DLCl.2应采用正常海况(NSS),且在适合于预期场址的海洋气象参数长期联合概率分布的基础 上,为每种正常海况选择有义波高、谱峰周期、方向以及相应的平均风速。设计者应确保所考虑的正常 海况的数目和分辨率足以计算与海洋气象参数长期分布有关的疲劳损伤。
DLCl.3包含了极端湍流条件引起的极限载荷要求。DLCl.3应釆用正常海况(NSS),且每个单独 海况的有义波高应取为相应平均风速条件下有义波高的期望值。
DLCl.4和DLCI.5规定了可作为海上风力发电机组寿命期内潜在危险事件的瞬态工况。DLCl.4 和DLCl.5应釆用正常海况(NSS),且每个单独海况的有义波高应取为相应平均风速条件下有义波高 的期望值。也可使用正常确定性设计波(NWH)来进行模拟,其中波高可假定等于相应平均风速条件
7) 通常分辨率为2 m/s已经足够。
8) 对于DLCl.4和3.3,在平均风向瞬变前,可以假设风和浪为同向,且单向。
下有义波高的期望值。
对于DLC1.4,可假定在风向瞬变之前,风和波浪同向。
DLCl.6a包含了由正常湍流模型(NTM)和恶劣海况(SSS)引起的极限载荷要求。每种海况的有 义波高应由相关平均风速的有义波高条件分布计算得到,见6.4.1.30
对于DLCI.6b,应按6.4.1.4计算每个平均风速的恶劣确定性设计波高(SWH)O若计算DLCI.6a 时,已在恶劣随机海况的动态仿真中完全表现出非线性波运动特性,则可省略DLCl.6b的计算。
计算风轮-机舱组件的载荷时,DLC1.1仿真数据的统计分析应至少包括叶片根部面内和面外弯矩 以及叶尖挠度的极值计算。如果DLCl.3的极限设计值超出上述参数的极限值,则DLC 1.1的进一步 分析可忽略。如果由DLC1.3的极限设计值未超出上述参数的极限值,可增加极端湍流模型所用到的 参数c[GB∕T 18451.1-2012中式(19)]的值,直到根据DLCl.3计算所得的极限设计值达到或超过根 据DLCl.1计算所得的极限设计值。
7.4.2发电时有故障或电网连接中断(DLC2.1-2.4)
此设计状态包括了海上风力发电机组发电期间由故障或失去电网连接所触发的瞬时事件。任何对 海上风力发电机组载荷有重要影响的控制系统和保护系统故障或电气系统的内部故障(如发电机短路) 均应考虑。DLC2.1中与控制功能或失去电网连接有关的故障属正常事件'I对于DLC2.2与保护功能 或内部电气系统相关的故障为罕见事件,属非正常事件。对于DLC2.3,潜在的重要风况EOG与电气 系统内部或外部故障(包括失去电网连接)的组合属非正常事件。在此种情况下,这两种事件发生时机 的选择应能产生最不利的载荷。若故障或失去电网连接后未能引起立即停机,由此产生的载荷可引起 严重的疲劳损伤,此工况的可能持续时间和在正常湍流模型(NTM)中造成的疲劳损伤应在DLC2.4中 评估。
DLC2.1,DLC2.2,DLC2.3和DLC2.4应采用正常海况(NSS),且每个单独海况的有义波高应取为 相应平均风速条件下有义波高的期望值。或者对于DLC2.3,可使用正常确定性波(NWH)来模拟,其 中波高应假定等于相应平均风速条件下有义波高的期望值。
7.4.3 起动(DLC3.1~3.3)
此设计状态包括海上风力发电机组从静止或空转状态到发电状态的瞬间可产生载荷的所有事件。 事件发生的次数应根据控制系统行为进行评估。
DLC3.1,DLC3.2和DLC3.3应采用正常海况(NSS),且每个单独海况的有义波高应取为相应平均 风速条件下的有义波高的期望值。或可使用正常确定性设计波(NWH)来模拟上述载荷工况,其中波 高应假定等于相应平均风速条件下有义波高条件分布的期望值。
对于DLC3.3,可假定在风向瞬变之前,风和波浪同向。
7.4.4 正常停机(DLC4.1~4.2)
此设计状态包括海上风力发电机组从发电状态到静止或空转状态的瞬间可产生载荷的所有事件。 事件发生次数应根据控制系统行为进行评估。
DLC4.1和DLC4.2应釆用正常海况(NSS),且每个单独海况的有义波高应取为相应平均风速条件 下有义波高的期望值。或可釆用正常确定性设计波(NWH)来模拟,其中波高应假定等于相应平均风 速条件下有义波高的期望值。
9)对于DLC2.1,也应该考虑与电网故障穿越有关的设计工况。
7.4.5 紧急停机(DLC5.1)
由紧急停机引起的载荷应予以考虑。
DLC5.1应釆用正常海况(NSS),且每个单独海况的有义波高应取为相应平均风速条件下有义波高 的期望值。
7.4.6停机(静止或空转)(DLC6.1~6.4)
在此设计状态下海上风力发电机组停机,风轮处于静止或空转状态。DLC6.1,DLC6.2和DLC6.3 用于分析极限载荷,DLC6.4用于分析疲劳载荷。
DLC6.1和DLC6.2应考虑极端风况和极端波况的组合,整个极端环境条件的组合重现期为50年。 在缺少极端风况和极端波况长期联合概率分布资料的情况下,可假定重现期为50年的10 min极端平 均风速发生在重现期为50年的极端海况下。对于DLC6.3,同样的假定可适用于10 min极端平均风速 和重现期为1年的极端海况的组合。
DLC6.1、DLC6.2和DLC6.3可通过湍流和随机海况的仿真来分析,或通过稳态风模型与确定性设 计波的组合分析。表1给出基于这两种方法的DLC6.1、DLC6.2和DLC6.3的附加载荷工况。上述设 计载荷工况,风况由极端风速模型(EWM)定义,可按表1所示使用稳态极端风速模型或极端湍流风速 模型。若使用稳态极端风速模型或稳态折算风速模型(RWM),则应与确定性设计波相组合,并通过准 稳态分析,并对动态响应进行适当修正来评估响应,参见附录D。
在DLC6.1、DLC6.2和DLC6.3中,计算作用于支撑结构上的载荷时应考虑风向和波向的方向偏 差。如果有合适的特定场址测量风向和波向,可从中得到与这些设计载荷工况有关的极端风况和极端 波况组合所对应的方向偏差角范围。载荷计算应基于此范围内的偏差角数值,并由此得到作用于支撑 结构上的最大载荷。
若缺少合适特定场址的风向和波向数据,应釆用导致支撑结构上作用有最大载荷的方向偏差角。 若该方向偏差角超过30°,由于在风向变化产生方向偏差角的期间内海况的恶劣程度降低,极大波高可 能会减小。应考虑水深、风区和其他相关的特定场址条件来计算极大波高的减小量。
若海上风力发电机组偏航系统在特征载荷下发生滑动,则应将最大可能的不利滑动加到平均偏航 误差中。如果海上风力发电机组设置偏航系统,并在该系统中考虑了极端风况下的偏航运动(如:自由 偏航、被动偏航或半自由偏航),则应釆用湍流风速模型,且偏航误差取决于湍流风向的变化和偏航系统 的动态响应。如随着风速的增加,海上风力发电机组由正常运行到极端状态的期间遭遇大幅度偏航运 动或平衡变化,这种情况也应纳入分析之中。
在DLC6.1中,对有主动偏航系统的海上风力发电机组,如能确保偏航系统不产生滑动,则釆用稳 态极端风速模型时允许最大偏航误差为±15°,或釆用极端湍流风速模型时允许最大偏航误差为±8°。
在DLC6.1a中,极端湍流风速模型应和极端海况(ESS)一起使用。应釆用全动态模拟来评估响应, 其中对极端风速和极端海况的每个组合,模拟应基于至少6个Ih的真实数据。在此情况下,轮毂高度 处的平均风速、湍流标准偏差和有义波高应取50年重现期值,且每个值都参考了 1 h的模拟周期。 50年重现期平均风速的1 h值可根据表1中的转换关系从10 min平均值获得,其结果见式(17):
卩 50, IhOUr = SlV50,1Omin= 0.95 ) ..............................( 17 )
湍流标准偏差1 h值可按式(18)从10 min值得到:
10)极端风浪条件可以在开始假定为同向。当风暴经过风力发电机组场址时,风向可能发生变化并引起与波浪方 向的偏差。在显著风向变化期间,波浪条件的恶劣程度将有所减缓。
σi.i hour =Cri.10 min 4- 6 (⅛ = 0.2 Γ∏∕S) ..............................( 18 )
可使用GB/T 18451.1-2012中附录B的湍流模型以及式(17)、式(18)给出的50年重现期平均风 速的1h值和湍流标准偏差。
对于1 h模拟周期的50年重现期的有义波高可从相应的3 h基准周期的有义波高转换得到,转换 关系见表1,对于深水区域:
奴=1.09 ..............................( 19 )
在浅水区域,式(19)中奴值则相对保守,可适当调整。
若能证明上述方法不会降低所评估的极端响应,则可釆用小于1 h的仿真。可使用约束波方法实 现,参见附录Do当釆用10 min模拟时间的约束波分析时,轮毂高度平均风速应釆用50年重现期的 10 min值,有义波高应釆用50年重现期的3 h值,嵌入规则波波高应不小于50年重现期的极大波 高 H 50。
对于DLC6.1b,应釆用稳态极端风速模型和折算确定性设计波(RWH),其中折算设计波的波高为 H redSO , 重现周期为50年。
对于DLC6.1c,应釆用稳态折算风速模型(RWM)和极端确定性设计波(EWH)O其中,风速为 Vred5o ,波高等于重现期为50年的极大波高H50。
计算DLC6.1a时,若已在极端随机海况的动态模拟中完全表现出非线性波运动学特性,则 DLC6.1b和DLC6.1c的计算可省略。
在DLC6.2中,应假定在风暴早期阶段极端风况下电网失效的情况。除非能为控制系统和偏航系 统提供后备电源,并且具有至少6 h的偏航调节能力,否则应分析风向变化±180°所产生的影响。
对于DLC6.2a,应采用极端湍流风速模型和极端海况(ESS),其中轮毂高度处的平均风速和有义波 高应取50年重现期值。极端响应应釆用DLC6.1a的方法进行评估。
在DLC6.2b中,应釆用稳态极端风速模型和折算确定性设计波(RWH),其中折算设计波的波高为 Hred5o,重现期为50年。计算DLC6.2a时,若已在极端随机海况的动态模拟中完全表现出非线性波运 动特性,则DLC6.2b的计算可省略。
在DLC6.3中,重现期为1年的极端风况应与极大偏航误差相结合。采用稳态极端风速模型时,假 定极端偏航误差为±30°,采用湍流风速模型时,假定平均偏航误差为士 20°。
在DLC6.3a中,应釆用极端湍流风速模型和极端海况(ESS)O其中,轮毂高度处的平均风速和有义 波高应取1年重现期值。应使用DLC6.1a的方法来评估极端响应。
在DLC6.3b中,应釆用稳态极端风速模型和折算确定性设计波(RWH),其中折算设计波的波高为 Hredl ,重现期为1年。计算DLC 6.3a时,若已在极端随机海况的动态模拟中完全表现出非线性波运动 特性,则DLC6.3b的计算可省略。
在DLC6.4中,对于出现任何部件重大疲劳损伤(如来自空转状态下叶片的重力)的各种风速条件, 应考虑这些风速所对应的波动载荷下预期的不发电时间。由于波浪的激励及由风轮静止或空转引起的 低气动阻尼影响,应特别注意支撑结构的共振载荷。应釆用正常海况(NSS)O应在适合于预期场址海 洋气象参数的长期联合概率分布基础上,为每个正常海况选择有义波高、谱峰周期和方向,以及相关的 平均风速。应确保所考虑的正常海况数量和分辨率能充分说明疲劳损伤,其与海洋气象参数的长期分 布有关。
7.4.7停机兼有故障(DLC7.1〜7.2)
对由电网或海上风力发电机组自身故障所引起的停机中所出现的不正常现象,应进行分析。在海 上风力发电机组的停机状态,如果任何故障(除失去电网之外)造成风力发电机组的不正常现象,则应分 析可能产生的后果。
对于偏航系统故障,则应考虑士 180°的偏航角度误差。对于任何其他故障,偏航角度误差应按 DLC6.1 选取。
在DLC7.1中,故障状况应与极端风况和极端波况相结合,整个极端环境联合作用的重现期为1年。 在缺少极端风况和极端波况长期联合概率分布资料的情况下,应假定1年重现期的IO min极端平均风 速发生在1年重现期的极端海况期间。
DLC7.1的分析可采用湍流和随机海况的模拟,或由稳态风速模型和确定性设计波的组合来进行。 根据上述两种方法,表1中规定了 DLC7.1的附加载荷工况。这些设计载荷工况,风况由极端风速模型 (EWM)定义,可按表1所示使用稳态极端风速模型或极端湍流风速模型。若使用稳态极端风速模型或 稳态折算风速模型(RWM),则应和确定性设计波相结合,由准稳态分析来评估响应,并对动态响应进 行适当修正,参见附录D。
在DLC7.1中,计算作用于支撑结构上的载荷时,应考虑风向和波向的方向偏差。若风向和波向有 合适的特定场址可供测量,则可从中得到与该设计载荷工况有关的极端风况和极端波况组合所对应的 方向偏差角范围。载荷计算应基于此范围内的方向偏差角值,并由此得到作用于支撑结构上的最大 载荷。
若缺少合适的特定场址的风向和波向数据,应釆用导致支撑结构上作用有最大载荷的方向偏差角。 若该方向偏差角超过30°,由于在风向变化产生方向偏差角的期间内海况的恶劣程度降低,极大波高可 能会减小。应考虑水深、风区和其他相关的特定场址条件来计算极大波高的减小量。
若在DLC7.1特征载荷条件下,偏航系统出现滑动,则应考虑可能的最不利滑动。
在DLC7.1a中,应采用极端湍流风速模型和极端海况(ESS)O极端响应按DLC6.1a方法进行 评估。
在DLC7.1b中,应釆用稳态极端风速模型和折算确定性设计波(RWH),其中折算设计波的波高为 HKiI,重现期为1年。
在DLC7.1c中,应采用稳态折算风速模型(RWM)和极端确定性设计波(EWH),其中,应假定风速 为Vredl ,波高等于极大波高Hi,重现期为1年。
计算DLC7.1a时,若已在极端随机海况的动态模拟中完全表现出非线性波运动学特性,则DLC7.1b 和DLC7.1c的计算可省略。
在DLC7.2中,对每个风速和海况应考虑由电网或海上风力发电机组故障导致的不发电时间的期 望小时数,该时间内,任何部件都可能出现重大的疲劳损伤。由于波浪的激励及由风轮静止或空转引起 的低气动阻尼的影响,应特别注意支撑结构上的共振载荷。应釆用正常海况(NSS)O应在适于预期场 址海洋气象参数长期联合概率分布的基础上,为每个正常海况选择有义波高、谱峰周期和方向,以及相 关的平均风速。应确保所考虑的正常海况的数目和分辨率能充分说明疲劳损伤,其与海洋气象参数的 长期分布有关。
7.4.8运输、安装、维护和修理(DLC8.1~8.3)
在DLC8.1中,制造商应说明海上风力发电机组运输、现场组装、使用、维护和修理假定的所有风 况、海况和设计状态。如果风况和海洋条件对海上风力发电机组产生重大载荷,则在设计中应考虑它们 的最大值。制造商应在规定工况与设计中所考虑的风况、海况之间留有足够的裕度,以给出可接受的安 全水平。可在规定风况上增加5 m/s以确保足够的裕度。
海上风力发电机组运输、安装、使用、维护和修理期间应考虑如下载荷:
•工具和移动式设备的重量;
•起重机运行产生的载荷;
•船只作业时停靠和系泊产生的载荷;
•其他相关的载荷,如直升机作业产生的载荷。
应考虑作业船只对支撑结构的撞击,并按ISO 19902的要求和指导进行分析。
应规定设计工况、作业船的最大尺寸和其接近海上风力发电机组的外部限制条件。此外,还至少应 考虑作业船以0.5 m/s的速度行进时与支撑结构撞击产生的冲击力,并计入附加质量系数,其中侧面撞 击为1.4,船首或船尾撞击为1.1。在上述情况下,应假定护舷设备吸收了所有和冲击力有关的动能。载 荷应考虑允许作业船登陆的最大风况、海况与作业船撞击的组合情况。
支撑结构吸收的能量取决于其与作业船撞击部件的相对刚度。若支撑结构的刚度很大,如混凝土 结构,则能量主要被船只吸收。与船只发生撞击后,应检查冲击力对支撑结构产生的损伤,并确定需要 进行的维修,以确保支撑结构有足够的承载能力。
若设计者不清楚作业船的信息,通常可以在支撑结构的整个宽度上作用5 MN的水平线载荷来计 算冲击力,且载荷还应考虑动态放大效应。应根据船只吃水、最大波高和允许作业船登陆的潮位来估算 撞击区域的竖向深度。实际中,竖向深度在相对平均海平面+ 3m〜一5m之间变化。计算局部压力 时,可假定竖向深度为2 m。
如相关,应考虑直升机作业对海上风力发电机组产生的载荷。运营方和设计方应规定设计状态、直 升机的最大尺寸及直升机接近海上风力发电机组的外部限制条件,并在载荷计算中予以考虑。
此外,DLC8.2应包括所有可能持续一周以上的海上风力发电机组运输、安装、维修情况。相应的, 还应包括未吊装完的支撑结构、支撑结构上未安装风轮-机舱组件和风轮-机舱组件缺少一只或多只叶 片的情况。应假定以上所有状态中电网均未连接。上述任一状态可釆取除电网连接以外的相应措施来 减少载荷。
锁定装置应能承受DLC8.1相应状态产生的载荷,尤其应考虑最大设计驱动载荷的作用。
对于DLC8.2a,应釆用极端湍流风模型和极端海况(ESS)O极端响应使用DLC6.1a所描述的方法 进行评估。
对于DLC8.2b,应釆用稳态极端风速模型和确定性折算设计波(RWH),其中折算设计波的波高为 Hredl,重现期为1年。
对于DLC8.2c,应釆用稳态折算风速模型(RWM)和确定性极端设计波(EWH)O其中,应假定风速 为Vwi,波高等于极大波高Hl ,重现期为1年。
计算DLC8.2a时,若已在极端随机海况的动态模拟中完全表现出非线性波运动学特性,则 DLC8.2b和DLC8.2c的计算可省略。
在DLC8.3中,应考虑在海上风场建造期间和并网之前,每个风速和海况下预期停机时间。该时间 内,任何部件都可能出现重大的疲劳损伤。还应考虑部分安装的海上风力发电机组的疲劳载荷,如部分 安装的支撑结构、未安装风轮-机舱组件的已竖立支撑结构,和未安装一只或多只叶片的风轮-机舱组 件,该状况将持续一段相当长的时间应釆用正常海况(NSS)O应在适于预期场址海洋气象参数的 长期联合概率分布的基础上,为每个正常海况选择有义波高、谱峰周期和方向,以及相关的平均风速。 应确保所考虑的正常海况的数目和分辨率能充分说明疲劳损伤,其与海洋气象参数的长期分布有关。
7.4.9海冰设计载荷工况
海上风力发电机组安装在可能存在海冰的场址时,除表1中的载荷工况外,其支撑结构的设计还应
11)应考虑未完成全部安装的海上风力发电机组对由风和(或)浪以及海流的涡流所产生振动的敏感性。 考虑表2中的载荷工况。海冰设计载荷工况E1~E7和相关载荷计算方法的说明参见附录Eo
表2海冰设计载荷工况
|
设计工况 |
DLC |
冰况 |
风况 |
水位 |
分析 类型 |
局部安 全系数 |
|
发电 |
El |
温度波动产生的水平载荷 |
NTM VFhUb=Vr+ 2 m/s 和 VOUl 风速产生最大推力 |
NWLR |
U |
N |
|
E2 |
水波动或拱效应产生的 水平载荷 |
NTM Vhub=Vr 土 2 m/s 和 VOUt 风速产生最大推力 |
NWLR |
U |
N | |
|
E3 对于极端 事件外推 |
相应速度的移动浮冰产生的 水平载荷 h =A50 远海 h=hτn闭合水域 |
NTM VhUb=Vr ±2 m/s 和 VoUt 风速产生最大推力 |
NWLR |
U |
N | |
|
E4 |
相应速度的移动浮冰产生的 水平载荷 h =hSQ 远海 h=hm 闭合水域 |
UinWhubVV0Ut |
NWLR |
F |
* | |
|
发电 |
E5 |
因水位波动由固定冰盖产生 的垂直力 |
无风载作用 |
NWLR |
U |
N |
|
停机 |
E6 |
冰丘和冰脊产生的压力 |
EWM 湍流风速模型 VhUb=VI |
NWLR |
U |
N |
|
E7 |
相应速度的移动浮冰产生的 水平载荷 A=^50远海 h=hm闭合水域 |
NTM VhUbVO.7 Vrref |
NWLR |
F |
* |
表2中所使用缩略语和符号
|
DLC EWM NTM NWLR F U N * |
设计载荷工况 极端风速模型(见GB/T 18451.1) 正常湍流模型(见GB/T 18451.1) , 正常水位范围(见6.4.3.1) 疲劳(见7.6.3) 极限强度(见7.6.2) 正常 疲劳载荷局部安全系数(7.6.3) |
7.5载荷和载荷效应计算
应使用合适的方法来计算载荷和载荷效应,同时适当考虑海上风力发电机组对相应外部条件组合 的结构动态响应。
7.5.1水动力载荷的相关性
作用在海上风力发电机组支撑结构上的水动力载荷会导致支撑结构的振动,间接地影响风轮-机舱
组件。通常,水动力载荷对风轮-机舱组件的间接影响很小,根据支撑结构的动态特性,有些情况下可忽 略不计。
如能证明水动力载荷的影响可忽略,则设计者可不考虑水动力载荷对风轮-机舱组件的影响。在所 有工况中,包括在风轮-机舱组件设计中不考虑水动力载荷的工况,均应依据海上风力发电机组场址的 海洋条件来证明结构的完整性。
对于和海上风力发电机组支撑结构设计相关的载荷计算,应考虑7.3.1~7.3.6所描述的所有载荷。 载荷计算应基于海上风力发电机组场址的典型外部条件。
7.5.2水动力载荷的计算
应釆用适当的方法计算作用在海上风力发电机组支撑结构上的水动力载荷。附录D介绍了支撑 结构的水动力载荷计算方法,并且考虑了附属装置和海生物的影响。
应考虑海生物对支撑结构水动力载荷的影响,可通过考虑“硬”体海生物的平均期望厚度增加支撑 结构外部尺寸,以及根据海生物的期望数量和厚度将结构单元划分为“光滑”或“粗糙”。如果结构构件 高于最高天文潮位,可以认为其水动力性是光滑的。
如果海生物的厚度能够完全堵塞某些部件,则应在支撑结构水动力载荷模拟中适当考虑这种影响。
7.5.3海冰载荷计算
附录E介绍了海冰引起的静态和动态载荷的计算方法。
7.5.4仿真要求
利用结构动力学模型的动态仿真,通常用于计算海上风力发电机组的载荷效应。由于某些载荷工 况需输入随机风和/或随机波,因此,釆集载荷数据的总周期应足够长,以确保特征载荷效应评估的统计 可靠性。一般对于仿真中考虑的每个轮毂高度处的平均风速和海况,至少需要6个10 min的随机仿真 (或连续1 h周期)。对以下设计载荷工况有更详尽的计算要求:
• 在DLC 2.1、DLC 2.2和DLC 5.1中,对于每个给定风速和海况应至少进行12个10 min的 仿真;
•在DLC 1.1中,对于每个平均风速和海况组合,仿真的数量和周期应能足够确定一个可靠的极 值长期概率分布,用于特征载荷效应的外推;
• 在DLC 1.6a、DLC 6.la、DLC 6.2a、DLC 6.3a和DLC 7.1a中,对于仿真中考虑的每个平均风速 和海况,至少需要6个Ih的随机仿真。若设计者能证明评估的极端响应低于1 h仿真所获响 应的严重程度,则可放宽上述要求,采用较短的仿真。为此可使用约束波方法,参见附录DO
对于所选的仿真周期,应使用合适的平均风速、湍流标准偏差和有义波高的值,作为载荷工况动态 仿真的输入。
除DLC 1.6a,DLC 6.1a、DLC 6.2a、DLC 6.3a和DLC 7.1a外,平均风速、湍流标准偏差和有义波高 的值应作为动态仿真的载荷工况的输入,若必要,应进行调整以确保输入参数的基准期与所选的仿真周 期匹配。12.3和12.4对不同基准期的风速、湍流标准偏差和海况参数给出了调整要求和方法导则。在 DLC 6.1a、DLC 6.2a、DLC 6.3a和DLC 7.1a中,应釆用7.4.6规定的转换要求。对于DLC 1.6a,附录G 给出相应导则。
由于在仿真周期的前期,用于动态仿真的初始条件会对载荷效应的统计有影响,因此在任何分析区 间(包括随机风和/或波浪的输入),均应去除前5 S的数据(如必要,可更长)。
在那些对随机海况和给定风速范围内的湍流进行仿真的载荷工况中,应计算特征载荷效应的超越 概率,计算中应考虑海上风力发电机组安装场址的正常海况和风速的联合概率分布。由于许多载荷计 算包括有限时段的随机仿真,因此根据要求的由对应重现期所确定的特征载荷效应可能会大于仿真计 32
算的任何值。
对于给定风场和波浪环境的载荷工况,载荷效应的特征值应是最不利情况计算的暂态值。当湍流 和不规则海况组合时,对于不同随机仿真,应采用最不利情况计算的载荷效应平均值,除DLC2.1、 DLC2.2和DLC5.1以外,载荷效应的特征值应是1/2最大载荷效应的平均值。
7.5.5其他要求
每个设计载荷工况都应该考虑到7.3.1〜7.3.6规定的载荷。若与下列因素有关,也应予以考虑:
•由海上风力发电机组自身(尾流诱导速度、塔影效应等)引起的空气流场扰动;
•三维气流对叶片气动特性的影响(如三维失速和叶尖气动损失);
•非定常空气动力影响;
•结构动力学和振动模态耦合;
•气动弹性效应;
•海上风力发电机组控制系统和保护系统的动作;
•海上风力发电机组的叶片或其他部件覆冰对气动特性和动态特性的影响;
•基础和海床相互作用的静态和动态特性,设计者应重点考虑到基础和海床的非线性相互作用, 以及因冲刷和沙波等作用而产生的动态特性的不确定性和潜在的长期时变,应根据支撑结构 共振频率的变化和基础所承受载荷的变化来评估海上风力发电机组设计的稳固性;
・累积的海生物重量对支撑结构的共振频率和动态载荷的影响;
•由空气动力和水动力载荷组合引起的海上风力发电机组的动态响应;
•非线性波动特性,参见附录C;
•衍射,参见附录D。
对于疲劳载荷计算,用于定义载荷工况的海洋气象参数(有义波高、谱峰周期和平均风速)的精度, 应能充分说明疲劳损伤,其与海洋气象参数的长期全分布有关。
考虑风向和波向之间实际方向偏差角的动态仿真,可证明由于横向气动弹性阻尼过低而导致的因 波浪力产生的支撑结构共振响应偏大。设计中应确保方向数据和支撑结构水平运动的气动弹性阻尼的 模拟是可靠的。
多数情况下,所给海上风力发电机组零部件关键位置的局部应变或应力取决于同时作用的多轴向 载荷。这种情况下,仿真输出的正交载荷时间序列有时可用于确定设计载荷。当釆用该正交载荷分量 时间序列计算疲劳和极限载荷时,应将这些分量合成,以保持其幅值和相位。因此,直接的方法是基于 对主要应力时间序列的推导。极限和疲劳载荷的预测方法适用于此单个信号,避免了载荷合成的问题。
也可用保守方法将极限载荷分量合成,即假定各分量的极值同时出现。
应定义用于评估混凝土裂缝和地基沉降的设计工况。建议使用基于发电载荷工况(DLCI.2)的下 列两种方法之一:
•超出1%概率的弯矩产生的载荷;
•与最大平均推力[加上了 1.28倍标准差(90%分位点)]有关的弯矩产生的载荷。
7.6极限状态分析
7.6.1方法
本标准使用局部安全系数形式来考虑载荷和材料的不确定性和易变性、分析方法的不确定性以及 失效构件的重要性。
海上风力发电机组风轮-机舱组件的极限状态分析应满足GB/T 18451.1规定的要求。对于支撑结 构的设计应符合以下子条款中的规定。
7.6.1.1局部安全系数形式
当设计载荷效应Sd不超过设计抗力Rd时,可认为结构或结构零部件的安全水平满足要求。
Sd≤Rd ..............................( 20 )
该设计准则也可称为设计不等式,相应的,=Rd即为设计等式。
7.6.1.1.1设计载荷效应
下列两种方法用来确定特定载荷Fi对应的设计载荷效应Sdio
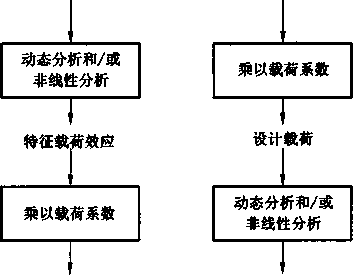
方法1:设计载荷效应Sdi由特征载荷效应Sln乘以特定的载荷系数儿得到,即:
Sd, =&SIU ..............................( 21 )
式中特征载荷效应Ski通过特征载荷FH作用下的结构分析确定。
方法2:设计载荷效应Sdl从设计载荷Fdi的结构分析获得,其中设计载荷Fd,由特征载荷FH乘以规 定的载荷系数九得到,即:
Fii=7llFkl ..............................( 22 )
当主要考虑动态响应时,通常釆用方法1来确定设计载荷效应。若主要考虑非线性材料特性或几 何非线性以及二者均考虑时,通常采用方法2。方法1通常用来确定风力发电机组载荷对支撑结构(包 括塔架)的设计载荷效应。方法2通常用于支撑结构和基础的设计,以塔架的载荷效应作为边界条件。 两种方法的区别见图4。
方法1
方法2
特征载荷 特征载荷
设计载荷效应 设计载荷效应
图4计算设计载荷效应的两种方法
7.6.1.1.2设计抗力
下列两种方法用来确定特定构件的设计抗力R% 方法1:设计抗力由材料的特征强度确定:
(23 )
式中:
∕m —对应于材料强度的材料系数;
fk——材料强度的特征值。
方法2:设计抗力由特定构件的特征抗力确定:
式中:
∕m —对应于特定构件的材料系数;
Rk——构件抗力的特征值。
根据GB/T 18451.1的规定,式(21)应与式(23)共同使用。某些标准,如ISO 19902,要求式(22)和 式(24)结合使用,而其他标准,如ISO 19903,要求式(22)和式(23)结合使用。
7.6.2极限强度分析
支撑结构系统及其构件的设计抗力应按照ISO海上结构设计标准或其他公认的海上标准来确定。 塔架的设计抗力也可按照GB/T 18451.1确定。在支撑结构设计中,应采用本标准规定的极限强度设 计载荷工况和相关的载荷安全系数。
为评估每个支撑结构部件,对表1中适合进行极限强度分析的每个载荷工况,在最临界极限状态下 验证式(21)的设计准则时,应以具有最小裕度为基础。
如依据ISO标准或其他公认的基于相似设计原则的海上标准对下部结构和基础进行结构设计,应 釆用7.6.1.1.1中的方法2适当地考虑土壤非线性的影响。在典型设计工况下,除永久载荷外,主要载 荷是风载荷、水动力载荷以及永久荷载。基础和下部结构的设计载荷效应可以通过结构分析来确定,在 结构分析中可将设计风载荷效应作为外部载荷施加于风力发电机组的适当界面上(如塔筒法兰或海底) 进行分析,另外还应加上水动力载荷和永久载荷设计值。
在7.6.1.1.1的方法1中,将通用的载荷安全系数乘上特征载荷效应来确定设计载荷效应,其中特 征载荷效应由特征风载荷、水动力载荷和永久载荷组合的整体动态分析确定。在此情况下,应校准局部 安全系数,以补偿响应中未模拟土层和下部结构非线性的影响。校正应确保结构可靠度水平和本标准 相关规定一致,包括对相关ISO设计标准的参考。
7.6.2.1载荷局部安全系数
载荷的局部安全系数至少应为GB/T 18451.1中的规定值。表3给出了这些值。
表3载荷局部安全系数儿
|
_________ 不利载荷 |
________有利载荷⑵________ | ||
|
设计状态类型(见表1和表2) |
所有设计状态 | ||
|
正常(N) |
非正常(A) |
运输、安装(T) | |
|
1.35* |
1.1 |
1.5 |
0.9 |
|
* 对于设计载荷工况DLeLl,如果在规定的Vin和Vg风速之间载荷是通过统计载荷外推值得到的,则正常设 计状态的载荷局部安全系数应为兀= 1.25。 对于正常设计状态,如由重力引起的载荷响应FgraVity的特征值可以计算,且重力是不利载荷,则重力和其他载 荷的合成载荷所釆用的局部安全系数为: 7( = 1.1 ÷ 95 ∙ ζ2 (0.15 对于 DLCLl (P =(0.25 其他情况 W = Jl— l⅛1∣ ∣Fg"WFk∣ II k I FgraVity ∣> Fk i | |||
12)有助减小总载荷响应的预应力和重力载荷可视为有利载荷。
7.6.2.2抗力和材料的局部安全系数
应按ISO海上结构设计标准或其他公认海上设计标准来确定支撑结构系统及其部件的设计抗力。 应从上述标准中选取用于极限设计抗力评估的公式,及与其相关的材料强度和/或抗力的特征值、材料 和/或抗力的安全系数。塔架的设计抗力也可根据GB/T 18451.1来确定。
7.6.3疲劳失效
应按ISO海上结构设计标准或其他公认海上设计标准来确定支撑结构系统及其部件的设计抗力O 应从上述标准中选取用于疲劳设计抗力评估的公式,及与其相关的材料强度和/或抗力的特征值、材料 和/或抗力的安全系数。塔架的设计抗力也可根据GB/T 18451.1来确定。在支撑结构的设计中应使 用本标准规定的疲劳设计载荷工况和相关的载荷安全系数。
为了对支撑结构各构件进行评估,在使用表1和表2中各种载荷工况对每个支撑构件进行评估时, 应以极限受载状态为准,取安全裕度最小的情况评估。
7.6.4特殊局部安全系数
由测试或在测试基础上的分析得岀的载荷值,如果其置信度高于正常水平,则可釆用较低的载荷局 部安全系数。所有使用的局部安全系数值应在设计文件中加以说明。
8控制和保护系统
决定海上风力发电机组运行与安全的控制系统和保护系统应符合GB/T 18451.1的要求。
应制定相关规定,对控制系统和保护系统的所有部件进行适当保护,避免受到海洋环境的影响。相 关腐蚀防护导则参见附录HO
9机械系统
本标准中,机械系统不包括独立的静态结构零件或电气零件,而是指将轴、连杆、轴承、滑动部件、齿 轮和其他设备结合起来使用或传递相对运动的系统。在风力发电机组内部,上述系统可包括传动链中 各部件(如齿轮箱,轴和联轴器),以及辅助部件(如制动装置、变桨装置和偏航驱动等)。辅助部件可由 电力、液压、气动方式进行驱动。
海上风力发电机组的机械系统设计应满足GB/T 18451.1的要求。
应制定相关规定,对机械系统进行保护,以避免受到海洋环境的影响。相关腐蚀防护导则参见附 录Ho
10电气系统
海上风力发电机组的电气系统包括风力发电机组终端在内的所有安装在其上的电气设备。以下称 为“风力发电机组电气系统”。
本标准不包括电力汇集系统。
海上风力发电机组电气系统的设计应满足GB/T 18451.1的相关要求(仅适用于陆上风力发电机 组的要求除外)。
应制定相关规定,对电气元件进行适当保护,避免受海洋环境影响。应依据国际、国内相关的设计 规范来选择电气元件的腐蚀等级、气候等级、环境等级、污染等级和外壳防护IP等级。腐蚀防护导则参 36
见附录HO
设计者应该适当考虑电气绝缘要求、盐分环境、湿度和温度、通风要求、潮气和凝露、滴水的可能性、 机械冲击或振动、维护要求,以保持风力发电机组电气系统的完整性。
11基础设计
对于海上风力发电机组基础的设计和结构分析,应按照ISO海上结构设计标准或其他公认的海上 设计标准进行。若采用ISO以外其他设计标准,则需证明在极限强度和疲劳强度等方面达到相同的结 构可靠度等级。本标准表1及表2中的设计载荷工况及相关载荷安全系数应作为基础设计的依据。
一般情况下,设计分析应符合GB/T 23511的要求。对于广泛适用于海上结构的地质科学和基础 工程方面的技术和特定要求基于ISo 19901-4o适用于多种海上结构,且满足特定要求的地质和基础工 程,应依据ISO 19901-4o桩式基础通常为固定式钢结构,其具体要求见IS。19902o浅水重力式基础 通常为固定式混凝土结构,其具体要求见ISO 19903o
基础的设计应能够承受静态及动态载荷(循环及冲击载荷),且结构不应出现过度变形及振动。此 外,应特别注意循环及瞬态载荷作用下的结构响应及其对支撑土壤强度的影响。应对海床相对于基础 构件运动的可能性进行研究,若能对海床运动产生的载荷进行预估,在设计时应予以考虑。
应考虑在运输和安装过程中作用在基础上的载荷。对于桩基础(见图1),应对桩体打入海床时产 生的疲劳损伤进行分析计算⑶。疲劳分析应考虑桩身动态特性及桩体设计、打桩过程等引起的应力 增加。
应制定相关规定,对海上风力发电机组支撑结构进行保护,以避免腐蚀,腐蚀防护导则参见附 录Ho
附录F给出了海上风力发电机组基础设计相关的指导文件名录。
12海上风力发电机组场址外部条件评估
12.1概述
海上风力发电机组受环境和电气方面影响(包括附近的机组),这些因素可影响其载荷、寿命和运 行。除这些条件外,还应考虑海上风力发电机组场址的地震条件、地形条件和地质条件。
应对海上风力发电场址的外部条件进行评估,并按照如下各子条款的要求将评估结果作为设计和/ 或设计验证的基础。在设计文件中应明确说明海上风力发电机组设计的外部条件。附录A列出的关 键外部条件参数作为设计依据。
7.6.2.1中载荷局部安全系数假定正常风况和极端风况的场址评估是按本条的最低要求进行。
12.2海洋气象数据库
应建立特定场址的海洋气象数据库,并包括以下信息:
•风速和风向;
•有义波高、波浪的周期和方向;
•风和波浪统计的相关性;
•流速和流向;
•水位;
・海冰的发生和特性;
13)在海上风力发电机组寿命周期内桩体总的累积损伤中,沉桩过程产生的疲劳损伤可能占重要部分。
•覆冰;
•其他相关的海洋气象参数,例如:气温和水温、空气和水的温度与密度、水的密度和盐度、场址 地形测量、海生物等。
数据库可根据特定场址的测量来建立,若可行,亦适用,测量可运用数值仿真(追算法)。若釆用特 定场址的测量数据,结果通常要与附近区域的长期测量结果保持相关,除非可用其他方式证明结果是保 守的。对特定场址的测量要有足够的监测周期以保证每个单独参数以及这些参数的联合概率分布S的 可靠性。当邻近地区有合适的相关长期数据,或釆用数值工具能够可靠地获得特定场址长期数据时,通 常不要求进行特定场址长期观测。
在确定浅水场址的波高、周期和波谱时,时间序列的测量尤其重要。
当评估数据的质量和数量时,应特别注意数据的充分性以满足罕遇事件的外推。
12.3风况评估
应估算风力发电机组场址的下列参数值:
• 50年重现期轮毂高度处的10 min平均极大风速;
•风速概率密度函数∕>(Vhub);
•环境湍流标准偏差估计为纵向分量标准偏差的平均值⑸;和在(Vi∏≤VhubCVout,Vhub =‰) 时σ的标准偏差
•风切变⑹;
•空气密度。
上述风速区间的间隔应小于或等于2 m/s,并且风向扇区应小于或等于30°o除空气密度外,上述 参数都可以为10 min平均风向的函数。
场址风况参数应釆用下列两种方法之一获得:
•在0.2V&和0.4VM的范围内测量,并外推计算;
•根据场址短期监控测量数据、当地气象站长期记录或按当地的规范/标准计算。
当特定场址极端平均风速的平均周期长于10 min时,可采用表4规定的转换系数估算极端10 min 平均风速。这些系数为给定平均周期内的极限风速和10 Inin极端平均风速的比率。
表4不同平均周期极端风速之间的换算
|
平均周期 |
10 min |
1 h |
3 h |
|
相对10 min平均风速的修正因子 |
1.00 |
0.95 |
0.90 |
可假定平均风速VhUb的长期概率分布与周期在10 min和3 h范围内的平均周期无关。
湍流标准差可通过采用适当的统计技术对测量数据和可用去趋势数据的分析来确定。当地形(海 岸线)或其他局部效应可对湍流强度产生影响时,这些效应应在数据中予以体现。在评估湍流强度时,
14) 如果只考虑测量数据的相关性分析,那么长期测量地点与预选海上风力发电场址距离应小于50 kɪn,并且两 个地点的水深、吹程和海床地形应相似。当长期数据与特定场址的短期数据结合使用时,应该注意二者应有 适当的相关性,并且可以估计相关性分析中的不确定性。如果长期测量地点距预选海上风力发电场址超过 50 km时,建议使用数值模拟(追算法)来估计场址的海洋气象统计数据。
15) 湍流纵向分量可用水平分量近似。
16) 据资料记载,在一些地区,超过周期的高切变值与高分层流或粗糙度的剧烈变化有关。第6章的外部条件并 不包括这些情况。
17) 当平均风速超过Km时,这个假设可能对长期概率分布的尾部无效。
应考虑用于数据测量的测风塔特性、取样率和平均时间。
若无适用于湍流的场址数据,可用表面粗糙度参数ZO来评估湍流标准偏差% ,而表面粗糙度参数 Zo可由CharnOCk公式获得,见式(25):
式中:
AC ---CharnOCk 常数;
g ——重力加速度;
K = O.4---VOn Karman 常数。
在远海建议Ac=0.011,近海取Ac=0.0341 2,o
海面粗糙度会随着风速而增加,因此湍流强度也将按其与风速的函数关系而增大。通过上面的隐 式方程可求解粗糙度参数。纵向风速分量的标准偏差由式(26)计算:
V..
ffι =I / / ? + I-28 × I-44 × ʃɪs ..............................( 26 )
ιn{zha∣3/z0)
式中:
/is——在VhUb = I5 m/s时轮毂高度湍流强度的平均值。
当缺少合适的特定场址数据来评估1 h平均周期的湍流标准偏差时,可认为其与10 min平均湍流 标准偏差有关,即:
σi.ɪhour +6 Cb =0.2 m/s) ..................( 27 )
当场址数据中没有空气密度时,可认为空气密度值与ISO 2533:1975 一致,并可根据年平均温度作 适当修正。
12.4波浪评估
应评估以下参数:
•重现期为50年的有义波高(假定3 h基准期)Hm。和相关的谱峰周期范围;
•重现期为1年的有义波高(假定3 h基准期)Hm和相关的波谱峰周期范围;
•重现期为50年的单个极大波高HSoi
•重现期为1年的单个极大波高
•重现期为50年的单个折算波高Hred50;
•重现期为1年的单个折算波高H瑚;
•重现期为50年的极端波峰高度。
可基于有义波高长期分布的尾部,通过对海洋气象数据库的外推来确定极大有义波高,见 ISO 199Ol-Io根据单个波高H(给出了有义波高HS)的短期条件分布,通过对有义波高HS和谱峰周 期TP的长期分布的卷积来确定单个极大波高。但极大波高可能受到水深的限制。
在海上风力发电机组场址上可能会有破碎波产生,这取决于水深、海底坡度、波高、周期和波陡。基 于对上述参数的评估,可依据具体风场条件,参见附录C中的导则来确定破碎波的特性和参数。
对于特定场址海洋气象数据库的分析将用来确定下列参数的联合概率分布:
•轮毂高度的平均风速Vm>;
•有义波高H,;
•谱峰周期Tp。
根据定义,H,和TP与平均周期无关,因此其长期概率分布不随平均周期而改变。为确定VhUl).Hs 和TP的联合概率分布,应选择平均周期来定义平均风速,并使其与有义波高和谱峰周期相关联。平均 周期应取为1 ho如果Vhub,Hs和TP的联合统计数据是基于不同的平均周期,则数据应该转换成基于 风速对应Ih平均周期的值。VhUb^Hs和TP之间的相关性会随平均周期而增加,由于风力的影响而增 大的波浪会在相当长的一段时间内出现(以小时计)。但由于风场的一些特性,这种关联可能不会随着 平均周期而显著改变,因此假设长期联合概率分布 Hs和TP与平均周期无关是合理的。
尽管用于推导这五个参数同时出现的特定场址测量数据经常无法获得m,若有必要应扩大联合概 率分布以便包括风向和波向。联合概率分布应釆用如下分辨率,即所有风速区间间隔均应小于或等于 2 m/s,所有有义波高区间的间隔均应小于或等于0.5 m,所有波周期区间的间隔均应小于或等于0.5 So 若方向数据可用,风向和波向扇区的扇角均应小于或等于30oo
对于特定场址的波谱和传播方向无评估要求,可参考附录B提供的标准公式。当有适当和可靠的 测量结果时,特定场址的波谱和方向分布函数可以作为海上风力发电机组设计和/或设计认证的依据进 行评估。
12.5海流评估
海流除了对海上风力发电机组支撑结构产生冲击载荷外,还会影响停靠船只和护舷的位置和方向, 同时会造成海床的冲刷。
评估海流时,应考虑到与风力发电机组场址有关的潮汐、风暴潮、风和波浪生成的表层流等因素。 应分别评估场址海流每个分量的流速和流向特点。
重现期为1年和50年的极端表层海流的流速,应通过特定场址的海洋气象数据分析来确定。
对于特定场址的流速随水深变化无评估要求,可使用6.4.2提供的标准廓线。当有适当和可靠的 测量结果时,特定场址的流廓线可以作为海上风力发电机组设计和/或设计认证的依据进行评估。
12.6水位、潮汐、风暴潮评估
应评估风力发电机组场址处水位的平均值和波动,以便确定下列参数:
・平均海平面(MSL);
•最高天文潮位(HAT)和最低天文潮位(LAT);
•最高静水位(HSWL),包含正风暴潮;
•最低静水位(LSWL),包含负风暴潮。
这些参数可由特定场址的海洋气象数据确定。对风暴潮的准确评估,需要一个长期的数据库。可 运用邻近场址长期测量或追算结果以及相关技术,来获得特定场址的风暴潮特性。
12.7海冰评估
当海上风力发电机组安装在海冰可能发生的场址时,应在支撑结构的设计中评估海冰的影响。评 估需要与海上风力发电机组场址海冰特性相关的详细信息。制造商应在设计文件中说明所假设的海冰 特性。下列参数应从冰图或相似资料的统计数据中予以确定:
•重现期为50年的海冰厚度H;
•冰的抗压强度气;
•海流和风所产生的浮冰风险;
20)尽管风和波浪同向的假定可能并不保守,但对于特定场地和海上风力发电机组结构,同向会是很保守的。
•水位波动导致的冰载风险;
•海冰密集度频率。
12.8海生物评估
应在可行的建议、当地经验和现有测量结果的基础上,评估海生物的厚度及其对水深的依赖性。有 必要对特定场址进行研究,以确定海生物的性质、可能的厚度和水深依赖性2"。
12.9海床运动与冲刷评估
海床的稳定性应进行评估。应确定场址的地形和土壤结构是否会产生倾斜,滑动,孔洞问题以及腐 蚀情况。通常在重力式基础设计时应考虑海床沉降和土壤液化。
通过观测,海底变化一般可以特征化为下列情况的组合:
•局部冲刷,特点为构件周围有陡边冲刷坑,如桩柱和群桩;
•以结构周围大范围的浅冲刷洼为特征的总体冲刷,可能是由总体结构效应、多重结构相互作用 或波浪-土壤-结构的相互作用所引起;
•在没有支撑结构时可能发生沙波、海脊和浅滩的整个海床运动。这样的运动可能导致海底的 升降或周期性的升降。增加人造结构后,可能会改变当地沉积物流动机制,导致腐蚀、堆积,也 可能不发生影响。
海床运动和冲刷可能导致基础竖向支承和水平支承流失,引起浅水基础产生不必要的沉降和位移, 使得基础构件处于超负荷状态,导致风力发电机组结构的动力特性发生改变。若存在冲刷,应在设计中 予以考虑,和/或釆取相应的防冲刷措施。
应确定风力发电机组场址的冲刷范围和必要的冲刷防护:
・根据邻近的或具有相似海底特征场址的前期记录;
•模型试验;
•样机或模型试验的校准计算。
12.10相邻风力发电机组尾流影响评估
应根据GB/T 18451.1的要求,对相邻风力发电机组产生的尾流影响进行评估。
12.11其他环境条件评估
为了与海上风力发电机组设计中所作的假设相比较,应评估下列环境条件:
•正常和极端气温范围;
•冰雹,雪;
・湿度;
•雷电;
・太阳辐射;
•化学活性物质;
•盐度;
•水密度;
•水温范围。
21) 一些区域关于海生物的信息是可查的(如北部海、波斯湾、西非海岸、墨西哥湾、加利福尼亚海岸、加拿大东海 岸),见 ISO 199Ol-IO
12.12地震条件评估
应根据GB/T 18451.1的要求,对地震条件进行评估。
12.13天气性工作期和天气性停工期的评估
天气性工作期和天气性停工期对海上风力发电机组的运输、安装和维护十分重要。应对风力发电 机组场址进行天气性工作期和天气性停工期的评估。
12.14电网条件评估
应对风电场的外部电气条件进行评估,以保证与风力发电机组设计条件相一致。外部电气条件应 包括下列内容
・正常电压和范围,包括在指定的电压范围和持续时间内并网或解列的要求;
•正常频率范围和变化率,包括在指定的频率范围和持续时间内并网或解列的要求;
・电压不平衡度,指对称和不对称故障的电压负序分量的百分比;
•中性点接地方法;
•接地故障的检测/保护方法;
•电网年断电次数;
•整个寿命期间电网断电总时间;
•自动重合周期;
•所需的无功补偿计划表;
•故障电流和持续时间;
•风力发电机组输出端的相间和相对地间的短路阻抗;
•电网的谐波电压失真;
•电力线路出现载波信号(若有且频率相同)情况;
•故障穿越能力要求;
•功率因子控制要求;
•上升速率要求;
•其他电网兼容性的要求。
12.15地质条件评估
应由具备专业资质的岩土工程师对拟建场址的土壤特性进行评估。
进行地质勘查以提供完整的信息来表征土壤特性随深度和区域的变化,该特性将影响基础结构或 受基础结构影响。一般地质勘査包括以下内容:
•风力发电机组场址的地质勘测;
•海底地形勘测,包括定位海底上的巨石、沙波或者其他障碍物;
•地球物理勘测;
•岩土勘测包括原位测试和实验室内试验。
为了开发必需的基础设计参数,勘测过程中所得到的数据应结合该区域浅层地质的评估来考虑分 析。若可行,土壤取样和实验项目可以在复核勘测结果后再进行。
地质勘査应包括一个或多个地质钻孔,为原位测试和室内试验提供土样,来确定适于定义工程特性
22)风力发电机组设计者应考虑电网适应性条件。上面介绍了一组最低要求。当地和国家电网的适应性要求应 在设计阶段确定。
的数据。需要的钻孔数量和深度应根据海上风场中风力发电机组基础的数量和位置、场址附近的土壤 变异性、基础的类型和地球物理勘探初步结果来确定。在地质勘査中,可使用静力触探试验和振动岩心 浅钻孔来补充土壤钻孔。原则上,在风力发电场中,应为每个基础确定特定场址的土壤地质参数,若风 力发电机组场址无地质钻孔,可釆用静力触探试验代替。若对静力触探试验进行标定,则应在紧邻地质 钻孔的位置进行试验。
地质勘查应提供下列数据,以作为基础设计的依据:
• 土壤分级和土层说明的数据;
•剪切强度参数;
•变形特性,包括固结参数;
•渗透性;
•用来预测风力发电机组结构动力学特性的刚度和阻尼参数。
应运用适当的原位测试和实验室内试验,对每个土层的上述工程特性进行全面评估。
地质情况的评估还要考虑土壤潜在的液化可能、基础结构的长时期沉降和位移,以及周围土壤、水 动力稳定性和土壤稳定特性。
13组装、安装和吊装
13.1概述
海上风力发电机组制造商应提供安装手册,明确说明海上风力发电机组结构和安装要求。海上风 力发电机组的安装应由经过专门培训或受过专业指导的人员完成。
海上风力发电机组设施场地应便于准备、维护、运作和管理,能使工作安全、高效的进行。应包括阻 止未授权人员进入的措施,操作人员应能分辨出存在的现有和潜在危险,并加以消除。
执行具体的安装工程。应准备好工作计划过程的清单,在安装和调试中应做好全面的记录,以提供 竣工数据。
在操作过程中,安装人员应使用有效的眼、脚、耳、头等个人防护装备。所有攀塔或者高空作业人员 都应经过相关的培训,并使用合格的安全带、安全攀爬辅助设施和其他安全装置。其他的安全设备也包 括:救生衣和漂浮辅助装备。
所有的设备都应保持完好状态,并符合其工作性质。起重机、卷扬机和提升设备,包括所有吊带、吊 钩和其他部件,都应符合安全提升的要求。
海上风力发电机组在非正常环境下,如冰雹、雷电、疾风、地震、覆冰、巨浪和极端潮汐等条件下的安 装,应特别注意。
安装规程应明确:为避免对人员造成伤害或使结构超载,如有必要,可中止作业。在塔架竖立而未 安装机舱时,应釆取适当措施,以避免由风或水流产生的涡流所引起的水平振动。安装手册应明确临界 风速和预防措施。
在海上风力发电机组进行任何安装工作之前,对于任何被认为是影响航海、航空的临时或者永久性 结构都应事先发布警示公告,并且在相关地图和数据库上标注出位置、范围和海拔。障碍警示灯和标识 都应遵循相关的国家、国际规范和条例。
所有与直升机运行相关的各方面,包括直升机平台结构安全、净空、防火和标识等,均应符合相关国 家、国际规范和条例。
13.2计划
风力发电机组及其相关设备的组装、吊装和安装应根据地方和国家规范做好计划,以使工作能安全 进行。除了质量保证要求外,计划还应包括以下相关内容:
•施工详图、工作说明及检查计划;
•安全进行釆掘作业、爆破和其他与基础建设、水下施工活动(如打桩、冲刷保护安置和电缆敷 设)相关的规程;
•预埋件(如基础、螺栓、地锚和钢筋等)的处理规范;
•混凝土成分构成、运输、取样、浇注、养护和管道敷设规范;
・塔筒和其他锚固件的安装规定;
•海上作业的健康、安全和环境保护的规程,包括潜水的安全规程;
•撤离规定(包括关于风况和海况的监测规程,以及顺次撤离)。
13.3安装条件
在海上风力发电机组安装过程中,现场应保持无安全隐患或者航行风险状态。
13.4场址出入通道
应确保场址出入通道安全,并应考虑下列因素:
・障碍物和进出路线;
•禁入区域;
•交通;
•通道的承载能力;
•场内设施的移动;
•船只-风力发电机组通道系统;
•直升机-风力发电机组通道系统。
13.5环境条件
在安装过程中,应遵循制造商规定的环境限制条件。应该考虑以下内容:
•风速;
•冰雪;
•环境温度;
•雷电;
•能见度;
•雨;
•波高;
•水深不足。
13.6文件
海上风力发电机组制造商应提供机组的组装步骤、安装和吊装用图纸、说明和指导。制造商还应提 供详细载荷、重量、起吊点、专用工具以及海上风力发电机组装卸和安装的必要步骤说明。制造商应提 供所有危险操作的风险评估。
13.7接收、装卸和储存
安装过程中,风力发电机组设备的装卸和运输应按照制造商推荐方法,釆用适合于此任务的设备 进行。
当可能因风力影响而产生移动并造成相应损伤时,应确保叶片、机舱、其他气动部件和较轻箱子的 安全。
13.8基础/地锚系统
为安装和组装的安全,应在制造商规定的地方使用专用工具、夹具、固定器和其他仪器设备。
13.9海上风力发电机组组装
海上风力发电机组的组装应按照制造商的说明书进行。应进行检查,以确保适当的润滑和所有零 件处于工作前准备状态。
13.10海上风力发电机组吊装
海上风力发电机组的吊装应由经过正确和安全的海上吊装培训以及接受过指导的人员进行。除应 进行机组安装方面的培训外,还应进行以下方面的培训:
•急救;
・海上特殊作业规程(如救生筏、救生衣、专用服装的使用和海上生存技能);
•包括受伤或失去知觉人员的疏散规程;
•船只、直升机和海上登陆系统的使用(应特别注意夜间的安全转移规程)。
所有工作都应至少由两个以上的人员协同完成,并且配备有合适的通讯工具。
在吊装过程中,除非安装需要,海上风力发电机组的电气系统不应接通电源。如须供电,电气设备 的供电操作应按照风力发电机组制造商提供的书面规程进行。
对运动(转动或平动)可能导致潜在危险的零件,在整个吊装过程中,应确保这些零件不会意外 移动。
13.11紧固件和咐件
带螺纹的紧固件和其他附件应按照风力发电机组制造商推荐的扭矩或其他说明安装就位。对关键 的紧固件,应进行检查并确保其满足所需的安装力矩及其他相关要求。
特别应进行以下项目的检査和确认:
・拉索、电缆、转动接头、起吊设备、其他附件和设备的正确装配和连接;
・安全吊装所需的提升装置的正确连接。
13.12起重机、提升机和起吊设备
起重机、提升机和起吊设备以及所有锁具、吊钩和安全吊装所需的其他设备,应满足安全提升要求, 能承受加于其上的全部载荷。制造商说明书和有关吊装和装卸文件应提供零部件和/或组件的期望负 载和安全起吊点。应测试所有起吊设备、吊索、吊钩,验证其安全负载。
14调试、运行和维护
14.1概述
考虑到人员安全,应制定调试、运行、检测和维护规定,并在海上风力发电机组手册中说明。
设计应包含对各部件检查和维护的安全准入规定。该准入系统应遵循当地、国家和国际的法规。
第IO章的要求也同样适用于为测量而临时安装在海上风力发电机组上的电气测量装置。
必要时,运行维护人员应使用有效的针对眼、脚、耳、头部的个人防护装备。所有攀塔人员、地面或 水面以上作业人员应经过专业培训,并使用合格的安全带、安全攀登辅助装置及其他安全装置(包括救 生衣、潜水衣和漂浮救护装置)。
14.2安全运行、检查和维护的设计要求
运行人员应能在平台上对海上风力发电机组进行正常操作。应提供标识明显的就地人工操作系 统,并且其优先级高于自动或远程的控制系统。
如果检测出外部原因所造成的故障,但并不影响海上风力发电机组安全,如失去电负荷后又恢复的 情况,则允许在完成停机后自动恢复到正常运行状态。
为防止人员发生意外碰触运动部件的事故,应安装固定的防护装置。只有经常出入的通道才能安 装可移动的防护装置。防护装置应:
•结构坚固;
•不能轻易跨越;
・在尽可能不拆除的情况下,使主要维修工作能够进行。
所有安装在海上风力发电机组支撑结构上的走道或者平台都应位于飞溅区域之上。出于安全,应 考虑海生物的移除措施。如现场有冰冻的风险,应考虑覆冰条件下限制接近爬梯和平台。同时还应考 虑坠落冰块对结构产生破坏的风险。
设计过程中,应考虑风力发电机组运行期间,旋转叶尖与走道或平台之间必要的最小竖向净距。
在设计中应规定使用故障诊断及监测设备。
为了保证检查和维护人员的安全,设计应包含以下内容:
•检査和定期维护所需的安全通道和工作场地;
•防止工作人员意外碰触旋转件或移动部件的适当措施;
•攀爬或平台面以上作业时,提供安全绳和安全带或其他防护器材的规定;
•在DLC8.1规定的风况和设计状态下进行服务作业时,对风轮旋转、偏航机构和其他机械运动 (如叶片变桨机构)进行锁死的规定,以及安全解锁的规定;
•带电导体的警示标记;
•合适的放电设备;
•适合的人员防火措施;
•备用的机舱逃生路线;
・提供紧急情况下海上风力发电机组的备用逃生通道;
•提供能在海上风力发电机组中生存一周所需的物资(食物、水、取暖物品、衣服或者毛毯
•海上安全装备(如救生衣、救生筏、照明灯、警示枪和信号弹)。
维护规程中应要求为进入任何封闭空间的人员提供安全措施(如轮毂或叶片内部),同时确保协助 人员了解任何危险状况,如有必要,可立即采取援救程序。
与航海和航空相关的障碍物照明和标识的操作应符合国家和国际有关标准和法规。
14.3调试说明书
制造商应提供调试说明书。
14.3.1接通电源
制造商的调试说明应包括风力发电机组电气系统首次接通电源的程序。
14.3.2调试测试
制造商的调试说明应包括海上风力发电机组完成安装后的测试程序,以确保所有装置、控制系统和 设备的正确性、安全性和功能运行。调试测试应包括但不限于以下内容:
•安全启动;
•安全停机;
•安全紧急停机;
•超速或者模拟超速状态下安全停机;
•保护系统功能测试。
14.3.3记录
制造商的说明书应包括对测试、调试和控制参数及其结果进行正确记录的说明。
14.3.4调试后的工作
安装完成后,接下来进入制造商建议的试运行期间,制造商可能还应完成一些特定工作。
这些工作包括但不限于紧固件的预紧、润滑油的更换、检查其他部件的装配和运行情况以及适当的 控制参数调节。
14.4运行人员指导手册
14.4.1概述
海上风力发电机组制造商应提供运行人员指导手册,在风力发电机组调试期间应针对当地特殊情 况适当补充手册内容。此手册应便于操作和维护人员阅读和理解,手册内容应包括但不限于以下方面:
・应由受过适当培训或接受过指导的人员来执行运行工作;
•安全运行范围和系统说明;
•启动和停机的规程;
•报警清单;
•应急方案;
•海上安全准入规程;
・其他规定的要求:
♦必要时,应使用合格的眼、脚、耳和头部的保护用具;
♦所有攀塔或水面以上作业的人员都应经过专业培训,并使用合格的安全带、安全辅助攀登 装备和其他安全装置。
14.4.2运行维护记录说明
手册中应规定保存运行维护记录,并包括以下内容:
•风力发电机组标识;
•发电量;
•运行时间;
•停机时间;
•故障报告日期和时间;
・ 维护或修理日期和时间;
•故障或维护性质;
•采取的措施;
•更换的零件。
14.4.3非计划自动停机的指导说明
手册应要求,对于由故障导致的非计划自动停机,即运行手册或指导说明规定外的停机,在海上风 力发电机组重启前,运行人员应检查引起停机的原因。应记录所有的非计划自动停机事件。
风力发电机组在超过3个月未发电的情况下重启时,应釆取特别的预防措施。重启前,应对所有部 件和系统进行全面检查,并评估其工程整体性。若确定部件和系统因长期不发电而不再满足设计要求, 则应进行维修或更换。重启后,应对主要部件和系统的运行状况进行监控,并使其恢复到正常发电 状态。
14.4.4可靠性降低的指导说明
手册中应要求采取措施,以消除任何非正常迹象或警告、可靠度降低的根源。
14.4.5工作程序计划
手册应要求海上风力发电机组按照安全工作程序进行操作,并考虑以下内容:
•电气系统的操作;
•运行和维护的协调;
•设备拆除规程;
・攀塔规程;
•仪器装卸规程;
•恶劣天气下采取的措施;
•通信程序和应急计划;
•风力发电机组准入规程。
14.4.6应急计划
手册中应该规定可能的意外紧急情况和运行人员应釆取的措施。
手册中应要求,当发生火灾或风力发电机组及其部件出现明显的结构损坏危险时,在危险未明确判 定之前,任何人都不宜接近风力发电机组。
在制定应急计划时,应考虑到下列因素可能增加结构损坏的风险:
•超速;
•覆冰;
•雷暴;
•地震;
•拉索断裂或松弛;
•制动失效;
•风轮不平衡;
・紧固件松脱;
•润滑不畅;
•火灾,水灾;
•船只撞击;
•其他部件失效。
14.5维护手册
每种海上风力发电机组均应配备维护手册,手册至少应包括风力发电机组制造商规定的维护要求 和应急程序,手册还应包括非计划维护的内容。
维护手册应说明易损件、破坏件、腐蚀件、海生物堵塞件等的说明及更换标准。
手册还应包括下列内容:
•风力发电机组的任何检查维护均要求由经过专业培训或受过专业指导的人员进行,其间隔时 间遵从手册要求;
•海上风力发电机组子系统及其运行描述;
・润滑时间表,规定的润滑周期和润滑剂种类或其他特殊液体;
・再调试程序;
•维护检査的周期和程序;
•保护子系统的功能性检査程序;
•完整的布线图和内部接线图;
•拉索的检查和紧固周期表、螺栓的检查和预紧周期表,包括拉紧力和扭矩;
•准入系统损坏的维护和修复方案,例如:由服务船只撞击导致的损坏;
・诊断规程和故障排除指南;
・推荐的备品备件清单;
•现场组装和安装图;
.工具清单;
•海生物的检查及必要的清理;
•防冲刷系统的维护。
附录A
(资料性附录)
海上风力发电机组关键设计参数
A.1海上风力发电机组标识
海上风力发电机组设计文件概要中应给出如下信息:
海上风力发电机组的名称和类型(说明);
场址坐标。
A.1.1风轮-机舱组件(机械设备)参数
应给出如下参数:
额定功率 EkW]
转速范围 [r/mɪn]
功率调节方式[失速/变桨]
运行质量(最小值,最大值) [kg]
风轮-机舱组件的防腐保护(说明)
A.1.2支撑结构参数
应给出如下参数:
基础包括冲刷防护(若存在)的说明
设计水深 [m]
风力发电机组周围的海底地形测量
风力发电机组场址的土壤条件(说明,参见12.15)
支撑结构的共振频率(最小值,最大值):
——正常运行状态时 [Hz]
——极端运行状态时 EHZJ
防腐保护说明
A.1.3风况(基于10 min基准期和考虑风场尾流影响,若相关)
应给出下列参数:
正常湍流模型(NTM)和极端湍流模型(ETM)所使用的以平均风速为函数的湍流强度
风速分布(威布尔、瑞利、实测值和其他分布)
正常风切变模型和参数 湍流模型和参数 轮毂高度处的极端风速Kl和KS [m/s]
1年重现期和50年重现期的极端阵风模型和参数 1年重现期和50年重现期的极端风向变化模型和参数 极端相干阵风模型和参数 方向变化的极端相干阵风模型和参数 极端风切变模型和参数 风向分布(风向玫瑰图)
A.1.4海况(基于3 h基准期,若相关)
包括方向的风浪联合概率分布(Hs,Tp,V) 波谱和参数 确定性波模型和参数 破碎波模型和参数 海冰条件(描述见12.7) 局部和整体冲刷或二者之和(允许的最大值) [m]
A.1.5风力发电机组电网条件
正常供电频率和范围
自动重合周期(说明) 对称和不对称外部故障期间状态特征(说明)
A.2其他环境条件
应给出下列信息:
正常和极端空气温度范围 正常和极端海水温度范围 空气密度
[°C]
[°C]
[kg∕m3J
[kg∕m3J
[W∕m2]
[%]
水密度
太阳辐射
湿度
雨、冰雹、雪、冰
化学作用物质
机械作用颗粒
雷电保护系统说明
地震模型和参数(说明)
盐度 [g∕r∏3]
DLC6.4釆用的持续时间和环境条件
DLC7.2釆用的持续时间和环境条件
DLC8.3釆用的持续时间和环境条件
A.3运输、吊装和维护的限制条件
应给出下列信息:
附录B
(资料性附录) 波谱公式
B.1概述
通过指定一个波谱,并采用线性随机波模型来描述海况通常是有效的。对于海上工程而言,通常首 选双参数的波谱公式,例如,采用有义波高HS和谱峰周期TiI来定义波谱。
最宜釆用的波谱形式由地理区域、待模拟海况的恶劣程度和相关使用条件决定。在风生海浪中,对 于已充分发展的海浪,常釆用PierSOn-MOSkOWitZ(PM)波谱;对于正在发展的海浪,常使用JOnSWaP波 谱。对于涌浪谱的相关信息参见ISO 199Ol-IO
若波谱和特定场址参数一起应用,可获得最佳结果,因为波普本质上考虑了风区和浅水影响的实际 限制。
B.2波谱
PM波谱适用于已充分发展的海浪,即波浪的增长不受风区的限制。对于很多区域,大部分时间属 于此种情况,因此PM波谱经常用于疲劳分析。海面高程的谱密度如下:
SPM(f) =0.312 5 ∙ •尺•广$ . exp(—1.25(¥)') ............( B.1 )
式中:
HS--有义波高;
/p——波峰频率√p = l∕Tp;
f——频率,Hz。
图B.1给出一种海况的PM波谱,其中Hs = 2.25 m,Tp = 7.13 SO
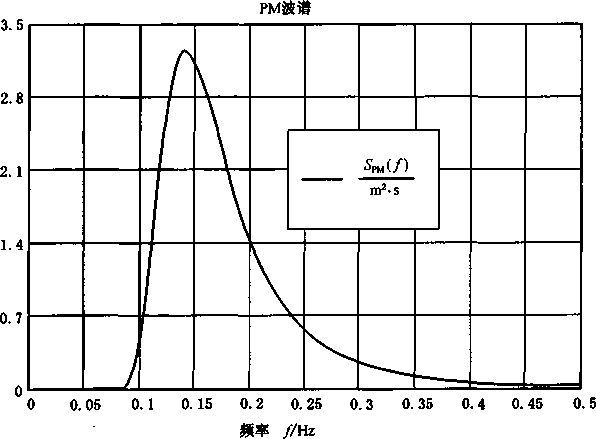
图B.1 PM波谱
B.3 JOnSWaP 波谱
JOnSWaP波谱是对PM波谱的一种修改,适用于受风区限制的发展中海域。与PM波谱相比,在风 暴状态下对于相同的总能量JOnSWaP波谱具有峰值较高,频带较窄的特点。因此,Jonswap波谱常用 于极限工况分析。
此谱引入了两个修正因子即峰值放大因子r和标准因子C(Z)0峰值放大因子增加峰值、缩窄波 谱;标准化因子减少谱密度,以确保这两种谱具有相同的能量)。选择该谱公式,当/=1时就是 PM波谱。
海面高程的谱密度公式如下:
Sjs(Z)=C(Z) - SPM (/) ∙ ∕α ........................( B.2 )
ISPM (_/) <if
C(7)= -⅛.......... ........................( B.3 )
J Spm (ʃ) 7°<if
式中:
7 ——峰形参数;
C(7)--标准因子。
例如,图B.2表示在北海典型的风暴海况下,Jonswap波谱和PM波谱之间的比较(HS = I4.4 m, TP = 15.4 s,∕ = 3.3) O
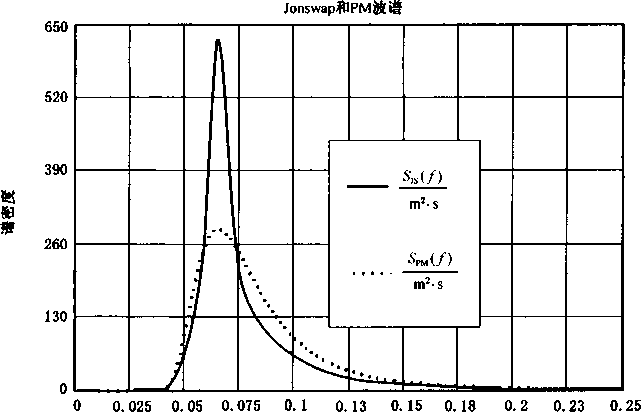
频率〃Hz
图B.2 JonSWaP波谱与PM波谱在北海风暴海况中的对照
可用下列值替代详细信息:
Z (/ — /p) 2 ∖ ∕τ>,∖
β=expI- - ) ..............................(B-4)
其中: σ = 0.07,∕≤∕p;
σ-0.09,∕>∕Po 峰形参数:
eχp 5.75-1.15

T τ^≤3.6 √H?
T 3.6≤-z^≤5 √∏7
T ⅛>5 √∏7
(B. 5
式中HS的单位为m,Tp的单位为SO 标准因子:
C(Z) =1—0.287 ・ ln7
(B. 6
当/ = 1时,标准因子应等于Io
应用上述数值JonSWaP波谱通常表示为:
Sjs(∕) = 0.312 5 ∙ ∙Tp∙ (ɪ) 5 • exp -1.25 (ɪ) ' • (1 - 0.287 ∙ Iny) ∙ yexp[-°'5∙(⅛) 2J
............(B. 7 )
JOnSWaP波谱是适用于浅水波的最佳波谱模型。
B.4峰值周期与跨零周期的关系
在谱峰周期TP和跨零周期TI之间存在以下近似关系。该关系式对PM波谱和JOnSWaP波谱都 适用。
7 ..............................(B-S)
对于7=1时的PM波谱,其关系式如下:
Tp =1.41 • TI ..............................( B.9 )
B.5波向分布
在海上结构的设计中,通常假定所有波浪均沿一个方向传播,即沿风向传播。因此,所有波浪都认 为是长峰的(二维的)。上述一维的波谱就反映了此情况。
大部分真实海况是由沿许多方向传播的大量大波和小波组成的,即某点的波能既有角分布,又有频 段分布。由于无长峰,称这样的波浪为短峰波。与长峰波相比,短峰波的波动作用减小,这一点可在二 维波谱S(f ,θ)中表现出来,其中/指与风向的夹角。
S(f,θ) = S(f) ∙ D(∕,0) ..............................( B.10 )
式中:
S(∕)——维波谱;
D(f,θ)——方向传播函数。
传播函数D(f,θ)通常是未知的,因此常用主方向两侧扇区上与频率无关的对称函数D(O)来代 替。并采用下列关系式进行定义:
Γ D(θ)dθ = l ..............................( B.11 )
J ~τt
方向信息通常很难测量和验证,因此在固定式海上结构的实际设计中,尤其是在浅水区,应使用单 向的海况。
B.6频率单位换算的影响
在本附录中,波谱使用的频率单位是HZO也可采用以rad/s为频率单位的波谱,两者满足以下 关系:
2π
a>=- ..............................( B.12 )
S(∕) =2τr ・ S(α>) ..............................( B.13 )
B.7参考文献
[1] ISO 19901-1, PetrOleUm and natural gas industries—SPeCifiC requirements for OffShOre StrUCtUreS一Part 1: MetOCean CieSign and OPerating COnditions.
[2] Det NOrSke VeritaS and Ris0 NatiOnal Laboratory, GUidelineS for DeSign Of Wind TUrbineS) 2nd edition 2002.
[3] Det NOrSke VeritaS DNV-OS-JlOI, DeSign Of OffShOre Wind TUrbine Structures, OCtOber 2007.
附录C
(资料性附录)
浅水流体力学和破碎波
C.1选择合适的波浪理论
可以釆用几个周期性的波浪理论来预测二维规则波的运动特性。不同的理论在适当的边界条件下 对同一微分方程均给出了近似解。所有计算表明,波形关于波峰对称,传播时形状不改变。这些理论在 函数表达式及波面处对非线性运动特性和动力边界条件的满足程度不同。图C.1以标准化波高和水深 函数的形式,为规则波理论的正确选择提供了依据。
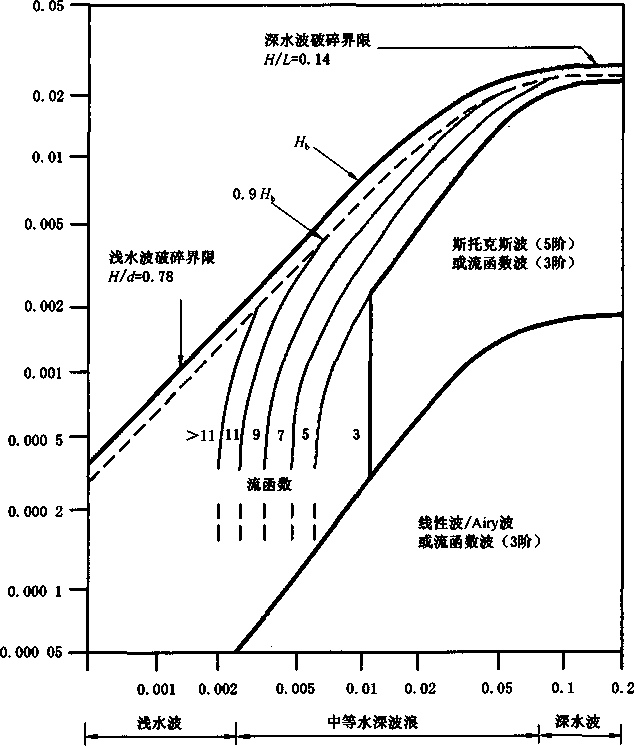
说明:
H--波高;
L——波长;
T --波周期;
d --水深;
g 重力加速度。
图C.1规则波理论选择图
GB/T 31517—2015/IEC 61400-3:2009
深水中波高较小的波浪实际上近似于线性。该区域内规则波的形状是正弦曲线,可以用线性Airy 波浪理论或低阶流函数来模拟。
随着波高增加或水深减少,波浪轮廓线变得更陡峭,在静水位以上的波峰高度比静水位以下波谷深 度更大。这样,波形和水颗粒运动无法用线性波浪理论准确描述。如果函数阶数选择正确,流函数理论 可适用于更广的深度范围。StOkeS 5阶波理论可用来模拟深水中的陡波。
当波高进一步增加或水深进一步减少时,波峰中水颗粒的水平速度将在某个点超过波速,波的结构 将破碎。水颗粒从波峰中向前甩出,亦即产生波浪的破碎。
波浪理论及其适用范围的详尽说明见ISO 199Ol-IO
C.2不规则波列的模拟
反映随机海况的不规则波列,可用正弦波分量的叠加来模拟,各正弦分量用Airy理论来描述。在 中等水深或浅水处,应评估Airy理论的准确性。
线性Airy波动理论定义了从海底到静水位的水颗粒运动。为了考虑水位变化,可应用波拉伸技 术。WheeIer拉伸和delta拉伸是两种适用的方法,见ISO 19901-1 ≈2OO5(A.8.4和A.9.4.1)o
波场中大体积结构的存在可能会显著影响结构附近行进波的波浪特性。此情况下,要求进行衍射 分析。可使用MaCCanIy-FUChS修正来说明结构载荷的波衍射效应。
在浅水中水面高程的分布将偏离高斯分布曲线,个别波高的分布将偏离瑞利分布曲线。该情况下, 可将BattjeS和GrOenendijk(见本附录参考文献[1])用于浅水场址区的波高分布。BattjeS和Groe-∏endijk模型是在按照海底坡度为常数、二维波浪、无海流条件进行物理实验的基础上提出的。因此,在 应用该模型时存在局限性&。小于1的波扩展因子可能无法与BattjeS和GrOenendijk模型一起应用。
BattjeS和GrOenendijk模型的波高分布为当地海底水深和坡度的函数:
Fi (∕ι) = 1 — exp
F (h) — Pr (h VZl)=Y
3.6 η
A ≤ Λtr
h h tr
仏和心是常数,其取值见表C.1。均方根波高HgS如下:
HrmS =^2.69√5w7 + 3.24 繹 ..............................
a
Htr = (0.35 + 5.8tanα!)・。 ..............................
(C.1 )
(C.2 )
(C.3 )
式中:
d --局部水深;
m0 ——海面高程的变化;
α(rad)——当地的海底坡度(正文中以S表述); Htr ——折算波高。
23)若使用BattjeS和GrOenendijk模型,建议满足下列条件:
a) 波浪传播方向与最陡海底坡度方向的夹角小于30°;
b) 在风力发电机组位置的迎浪方向上,当考虑1倍和3倍深水波长距离上海底坡度的平均值时,二者中较 大值应是正值,且不大于0.05 rad;
C)当考虑在风力发电机组位置迎浪方向上的10倍深水波长距离上的海底坡度值和在各波长区间内的海底 坡度平均值时,这10个海底坡度值中的每一个与b)中计算的坡度值相差不能大于0.02 rad,且任意相邻 区间的坡度值相差不能大于0.005 rad;
d)海流速度应小于1.5 m∕so
标准折算波高们'如下:
A.γ=7Γ2l ..............................( C.4 )
ʃɪ rms
超越概率s%的特定波高为:
Hkr% = hx% FIrms ..............................( C.5 )
对于不同 % 的取值见表c.lo
表C.1常数炳02,标准化波高hx%(htr的函数)
|
Λ,r |
h-↑ |
A2 |
为2% |
hχ% |
龙 0.1% |
|
0.05 |
12.209 |
1.060 |
1.549 |
1.621 |
1.814 |
|
0.10 |
7.012 |
lt060 |
1.549 |
1.621 |
1.814 |
|
0.15 |
5.070 |
1.060 |
1.549 |
1.621 |
1.814 |
|
0.20 |
4.028 |
1.060 |
1.549 |
1.621 |
1.814 |
|
0.25 |
3.369 |
1.060 |
1.549 |
1.621 |
1.814 |
|
0.30 |
2,912 |
1.060 |
1.549 |
1.621 |
1.814 |
|
0.35 |
2.575 |
1.061 |
.1.549 |
1.621 |
1.814 |
|
0.40 |
2.315 |
1.061 |
1.549 |
1.621 |
1.815 |
|
0.45 |
2.108 |
1.061 |
1.550 |
1.622 |
1.815 |
|
0.50 |
1.939 |
1.062 |
1.551 |
1.623 |
1.816 |
|
0.55 |
1.799 |
1.062 |
1.552 |
1.624 |
1.817 |
|
0.60 |
1.682 |
1.064 |
1.554 |
1.626 |
1.820 |
|
0.65 |
1.582 |
1.065 |
1.556 |
1.628 |
1.823 |
|
0.70 |
1.497 |
1.068 |
1.560 |
1.632 |
1.827 |
|
0.75 |
1.424 |
1.071 |
1.564 |
1.637 |
1.832 |
|
0.80 |
1.361 |
1.075 |
1.570 |
1.643 |
1.839 |
|
0.85 |
1.308 |
1.080 |
1.577 |
1.650 |
1.847 |
|
0.90 |
1.261 |
1.086 |
L586 |
1.659 |
1.857 |
|
0.95 |
1.222 |
1.093 |
1.596 |
1.670 |
1.869 |
|
1.00 |
1.188 |
1.100 |
1.607 |
1.682 |
1.882 |
|
1.05 |
1.159 |
1.109 |
1.620 |
1.695 |
1.898 |
|
1.10 |
1.134 |
1.119 |
1.635 |
1.710 |
1.914 |
|
1.15 |
1.113 |
1.130 |
1.650 |
1.726 |
1.932 |
|
1.20 |
1.096 |
1.141 |
1.666 |
1.744 |
1.952 |
|
1.25 |
1.081 |
1.153 |
1.684 |
1.762 |
1.972 |
|
1.30 |
1.068 |
1.165 |
1.702 |
1.781 |
1.993 |
|
1.35 |
1.057 |
1.178 |
1.721 |
1.801 |
2.016 |
|
1.40 |
1.048 |
1.192 |
1.741 |
1.821 |
2.038 |
|
1.45 |
1.040 |
1.205 |
1.761 |
1.842 |
2.062 |
表C.1 (续)
|
Atr |
龙1 |
h2 |
丘2% |
h∖% |
“0.1% |
|
1.50 |
1.033 |
1.219 |
1.781 |
1.864 |
2.086 |
|
1.55 |
1.028 |
1.234 |
1.802 |
1.885 |
2.110 |
|
1.60 |
1.023 |
1.248 |
1.823 |
1.907 |
2.135 |
|
1.65 |
1.019 |
1.262 |
1.844 |
1.930 |
2.160 |
|
1.70 |
1.016 |
1.277 |
1.865 |
1.952 |
2.184 |
|
1.75 |
1.013 |
1.292 |
1.887 |
1.974 |
2.209 |
|
1.80 |
1,011 |
1.306 |
1.908 |
1.996 |
2.234 |
|
1.85 |
1.009 |
1.321 |
1.929 |
2.019 |
.2.259 |
|
1.90 |
1.007 |
1.335 |
1.951 |
2.041 |
2.284 |
|
1.95 |
1.006 |
1.350 |
1.972 |
2.063 |
2.309 |
|
2.00 |
1.005 |
1.364 |
1.987 |
2.085 |
2.334 |
|
2.05 |
1.004 |
1.379 |
1.985 |
2.107 |
2.358 |
|
2.10 |
1.003 |
1.393 |
1.984 |
2.129 |
2.383 |
|
2.15 |
1.002 |
1.407 |
1.983 |
2.151 |
2.407 |
|
2.20 |
1.002 |
1.421 |
1.982 |
2.150 |
2.431 |
|
2.25 |
1.002 |
1.435 |
1.981 |
2.149 |
2.455 |
|
2.30 |
1.001 |
1.449 |
1.980 |
2.149 |
2.479 |
|
2.35 |
1.001 |
1.463 |
1.980 |
2.148 |
2.502 |
|
2.40 |
1.001 |
1.476 |
1.979 |
2.148 |
2.525 |
|
2.45 |
1.001 |
1.490 |
1.979 |
2.147 |
2.548 |
|
2.50 |
1.000 |
1.503 |
1.979 |
2.147 |
2.571 |
|
2.55 |
1.000 |
1.516 |
1.979 |
2.147 |
2.594 |
|
2.60 |
1.000 |
1.529 |
1.978 |
2.147 |
2.616 |
|
2.65 |
1.000 |
1.542 |
1.978 |
2.146 |
2.629 |
|
2.70 |
1.000 |
1.555 |
1.978 |
2.146 |
2.629 |
|
2.75 |
1.000 |
1.568 |
1.978 |
2.146 |
2.629 |
|
2.80 |
1.000 |
1.580 |
1.978 |
2.146 |
2.629 |
|
2.85 |
1.000 |
1.593 |
1.978 |
2.146 |
2.628 |
|
2.90 |
1.000 |
1.605 |
1.978 |
2.146 |
2.628 |
|
2.95 |
1.000 |
1.617 |
1.978 |
2.146 |
2.628 |
|
3.00 |
1.000 |
1.630 |
1.978 |
2.146 |
2.628 |
对于浅水区,如采用上式和表C.l相结合的方法确定重现期为50年的极大波高H50(EWH),折算 波高(RWH)可根据下式估算:
H red50 = 1 • 1 /2 H rms50
(C.6 )
式中HraI湖由50年重现期海况的海面高程变化获得,同样的方法可估算重现期为1年的折算 波高。
作为BattjeS和GrOenendijk波高分布的应用实例来考虑某个场址,其水深<√ = 21 m,测得的有义 波高(4倍的标准差)Hm0=7.1 m,海床的坡度tan α = 0.01o得出超越概率为0.1%的波高Ho.1⅝ :
波高标准偏差:両= HnI °∕4 =1.775(m)
折算波高: Htr = (0.35 + 5.8 X 0.01) X 21 =8.57(m)
波高均方根: Hg=2.69 X 1.775 + 3.24 X 1.7752∕21 = 5.26(m)
标准化折算波高:λ,r =Htr∕HrrnS=8.57/5.26 =1.63 .
由表 C.1 可得:当 Λtr =1.63 时,加=1.021,A2 = 1.256。
由分布函数F得到标准化的h0M :
• 由 FI 得:h0.ικ =∕ι1 (-ln(0.001)) 1/2 =1.021 X (- ln(0.001) ) 1/2 =2.68
• 由 F?得:h0.M =h2 (- ln(0.OOI)) 'z3∙6 = 1.256 × (-ln(0.001) )1/3-6 =2.15
因为h0.ι⅛ >∕ιtr = 1.63,所以釆用F?,因此 如% =2.15。
最终,超越概率0.1%的波高为:
H0.ι⅝ =2,15 X HrmS = 2.15 × 5.26 = 11.3(m)
波高的常规瑞利分布为:
Ho.ι⅝ =1.86 X 7.1 =13.2(m)
C.3破碎波
根据深水波陡和海底坡度的比值,波浪可以不同的形式破碎。
浅水中,根据经验,波高的破碎极限近似为当地水深的78%。海底倾斜(静水深度沿着波浪传播方 向减少)导致破碎波比当地相同水深中(O.78d)规则波的极限波高大得多。BarltrOP和AdamS提供了 导则(见本附录参考文献[2])。
波周期T与规则波的波高H有关,周期有一个取决于水深的下限,可从破碎波的波高限值中确 定,周期可近似表示为:
T > / °'78d ∙ arctan∕ι (HVo.78d) .....................( C.7 )
式中:
d-.一水深刃。
在深水中,当波陡超过1/7时,即当波高大于波长的14%时,波浪也可发生破碎。
破碎波的波高HB可用下式估计:
HB=i 6 / c〒 ..............................(C∙8)
[1/^ +α∕gT 訂
其中:
◎ =44 [1 — exp (― 19tanσ)] [1 + exp (— 19tanα,)]
24)注:在此表述中的常数0.14是基于规则的水平海床上的近破波理论,当海床不平坦或者有坡度时,其值可能改变。
式中:
Tb——破碎波的周期;
a ——海底坡度(正文中以S表述)。
破碎波特性受风和波浪之间、波浪和波浪之间及海流之间相互作用的影响。从外观上可将破碎波 分为崩碎波、卷碎波或激碎波。
崩碎波只在给定条件下发生破碎,并保持一边陡峭的波形。波形和水颗粒的运动可用高阶流函数 来描述。
卷碎波通常是在海底坡度突然上升时,由中等初始波陡的波浪破碎产生。因此,卷碎波的波高,比 当地水深的规则波的极限波高大得多,并在波峰形成水柱。当水柱冲击到固定结构时可产生很大的冲 击载荷和局部高压。
卷碎波很难进行数值模拟。附录D给出了一种方法。在静水面以下,波浪的形状和运动可用高阶 流函数解来描述。
当波高小的长波遇到海底斜坡时(如海滩),便会产生激碎波。该破碎波的特点与崩碎波和卷碎波 有很大不同,其对海上风力发电机组设计而言并不重要。
可能岀现的破碎波类型,可根据海底坡度α(rad)和波陡平方根的函数,从表C.2中确定。而参数E 可根据深水波高Ho或破碎波波高Hh及未扰动波的波长A0来计算:
. tana
A tana
表C.2破碎波类型
|
崩碎波 |
卷碎波 |
激碎波 |
|
^o<O.45 |
O.45<eo<3.3 |
Eo>3.3 |
|
孔 V0.4 |
0.4<eb<2.0 |
破碎波的出现和类型可能也受到自身结构(尤其是大体积结构)存在的影响。
C.4参考文献
[1] Battjes, J. A4, and Groenendijk, H. W., WaVe height distributions On shallow foreshores J J. Of COaStal EngLneering, VoL 40 (2000) pp.161-182.
[2] BarltrOP J N. D. P., and Adams, A. J., DynamiCS Of FiXed Marine StrUCtUreS » Butterworth Heinemann, ISBN 0 7506 1046 8, available from the Energy Institute, London, UK.
[3] Ochi, M. K., OCean Waves-The StoChaStiC APPrOaCh , Cambridge UniVerSity PreSS, 1998.
附录D
(资料性附录) 水动力载荷计算导则
D.1概述
在选择了适当的波浪理论后(参见附录C),即可计算与波浪和水流有关的水颗粒运动以及由此产 生的结构荷载。
运用下列方法可对不规则波列的水颗粒运动进行研究:
a) 白噪声过滤:该方法是釆用可显示波谱的滤波器在时域中过滤高斯白噪声;
b) 随机系数法:该方法中,海平面由多个正弦和余弦函数的和来近似,其中,每个正弦和每个余弦 函数都有一个取决于波谱的正态分布的随机振幅;
C)随机相位角法:该方法中,海平面由多个正弦(余弦)函数的和来近似,其中,每个正弦(余弦)函 数都有一个取决于波谱的固定振幅和一个随机相位角。
依据计算类型或应考虑的设计载荷工况要求,釆用一个或多个与现实接近的特征对水面进行建模 是非常重要的,例如:
•波谱粗糙度;
•波群长度;
•每个波群的波浪数量;
•仿真数据之间的差异。
使用随机相位角法时应注意:若使用无限个分量时,此法只模拟真实的高斯过程(并给出正确的“波 群”)。实际上至少应考虑IoOo个分量(见参考文献[l])o
海上结构的水动力载荷可以分成以下几类:
•黏性阻力载荷:水流经过构件时产生涡流,而涡流又引起黏性阻力载荷。黏性阻力和入流速度 的平方成正比。
・惯性载荷:构件与加速流体之间的局部相互作用和加速流体的压力梯度共同构成惯性载荷。 惯性力和流体的加速度成比例。
•动压载荷:当波浪经过结构时,流体静压力变化产生的载荷。
・衍射载荷:结构物的存在改变了波形,因此改变了作用于结构上的载荷。
•拍击和冲击载荷:构件穿过水面时产生的惯性力。该力和相对速度的平方成比例。
•涡旋脱落载荷:当每个产生拖拽力的涡旋离开结构时,都会在结构上产生波动力。如果结构的 自振频率接近涡旋“脱落”频率,那么会引起结构产生较大的振动。
•波辐射载荷:该载荷由结构的振荡运动引起,该运动使得自由表面波从结构处向外传播。这种 载荷与结构的振荡速度成线性关系,并取决于运动的历程。当振荡运动很小时(如安装于海床 中的大部分海上风力发电机组支撑结构就属于这种情况),波辐射载荷可以忽略不计。可根据 势流理论衍射/折射方法计算相关的阻尼。
除以上载荷,还应考虑静水压力场产生的载荷,其对未浸没构件尤为重要。
如果一个构件相对于波长很小,那么水颗粒运动只在局部受到构件影响,则可用MOriSOn公式依据 拖曳力和惯性力分量计算出该力,详见D.2o当构件尺寸大于波长的1/5值时,衍射效应就会非常明 显,见D.3。
D.2 MOriSOn 公式
MOriSOn公式(见参考文献2)是计算框架结构上拖曳力和惯性力的常用表达式。对于静态构件,公 式如下:
1 .
F=-CdPD ∖U∖U +CmpAU ........................( D.1 )
式中:
F --构件单位长度上的力;
Cd——拖曳力系数;
Cm --惯性力系数;
P ——水密度;
D --构件直径;
A --构件截面面积;
U——水流在垂直于构件方向上的流速;
U——水流在垂直于构件方向上的加速度。
若结构有明显位移,相对速度则会改变拖曳力,并产生水动力阻尼。相对加速度产生与惯性力相似 的力,这种力可方便地用附加水质量(其只能随结构移动)来分析。在这种情况下,MOriSOn公式则 变为:
ɪ • •
F = -CiPD ∖Uτ∖Ur -∖- CmPA UW — CSPA US ........................( D.2 )
式中:
Ut——垂直于构件的水流相对速度;
lλ——水流在垂直于构件方向上的加速度;
US——结构在垂直于构件方向上的加速度;
Ca ——附加质量系数(对于固定式结构的细长型圆柱构件,Ca = Cm-Do
Cd和Cm值作为雷诺数、表面粗糙度'Keulegan-Carpenter数和流速/波速比的函数而变化。很多 场址的试验都说明,名义上相同的条件下,G,和Cm值有很大的不同。因此,适用于海上结构的Cd和 Cm值有很大的不确定性。有关Cd和CnI值选取的方法,可参见本附录参考文献[3]。
对于非圆柱形构件,可参照本附录参考文献[4]对Cd和Cm值进行选择。应注意,对于非圆形的横 截面,G是入射流角度的函数。
D.3衍射
当结构的截面直径大于波长时(通常当D>0.2λ时),结构在改变波形的过程中会产生衍射。此时 MOriSOn公式不再适用。
为计算波的衍射效应,应遵循波浪理论的程序。此理论的附加边界条件是:衍射结构中无水流通 过。通常,须运用基于库源法或流体有限元的数值方法,并釆用线性波浪理论。此外,应检査由库源法 得出的结果,以避免不规则频率。若引入了新的结构概念,且载荷不能通过数值方法确定,则建议进行 模型试验。
对于一些简单的构件而言,如从海底延伸到自由面的立式圆柱体,可通过解析法来求解衍射问题。 MaCCamy和FUChS为从中等水深处延伸到自由面的圆柱体提供了解决方法(见本附录参考文献[5])。 沿着波传播的方向,作用于半径为α的圆柱体上的单位轴向长度的静载荷如下:
其中:
2pgH COSh(如) 1
k COSh(W) v∕A1(ka)
CoS(OM — Cr)
(D.3 )
Al(ka) =J,lXka) +Y,1%ka)1
a = arctan
(Jm)
'yTc⅞Σ)
(D.4 )
同样,单位长度上的水平力可等效表示成MOriSOn公式的惯性力部分:
(D.5 )
式中:
Ua——相位滞后4离海底高度S处的水颗粒加速度。
Ua = QgHk/2} (CoSh(如)∕cosh以d))cos(如— a) 4
Cm=----—= ..............................( D.6 )
π (ka) √zA?
可运用解析法来预估圆柱形基础(如单桩和某些重力式基础)上的波浪力。若结构的几何形状与所 假定的圆柱形相差太多,此公式可能产生错误结果,例如用于减少冰载荷的飞溅区圆锥形构件。
D.4拍击和冲击载荷
当构件突然浸入水中时会产生波浪的拍击和冲击力。当波浪经过时,近似水平的构件被上升的水 面吞没,便会产生波浪冲击力,构件的最大冲击力出现在平均水位,且冲击力的方向几乎垂直。波浪拍 击力与破碎波有关,除垂直于波向平面内的构件外,拍击力可影响到其他任何倾角的构件。最大拍击力 产生在平均水位以上。在这两种载荷工况下,施加的力均是冲击性的,因此,结构的动态响应很重要。
实际的水动力冲击载荷是非常复杂的。冲击发生时构件的形状、水面的准确形状和空气气泡均会 对冲击力产生很大的影响。单位长度上的冲击力一般按式(D.7)计算:
F=JCSPDU2 ..............................( D.7 )
式中:
CS——冲击系数。对于圆柱体,G的实测值一般在3〜7之间。
对于波浪的拍击或冲击,速度U不单是水颗粒的速度。U可以根据波浪理论,通过分解撞击点的 质点速度(首先垂直于水面,然后垂直于构件)来确定。理论上,在冲击方程中釆用IUIUp来替代U2 更为准确,其中,Us指水面穿过圆柱体直径的速度,Up指垂直于圆柱体的水颗粒速度。
拍击和冲击能产生高压。尽管计算中存在较大的不确定性,但仍可以估算这些压力。出于应用目 的,在开阔海域中的易受冲击或拍击的构件表面上可考虑1 MPa的压力。(见本附录参考文献[4])。
Wienke对作用于竖向和倾斜圆柱形结构上的破碎波测量(见本附录参考文献[6])表明,可将冲击 力Ft作为波浪力的附加分量叠加在MOriSOn公式中:
FWaVjbraJk=FD-I-FM + F] ..............................( D. 8 )
式中:
FD --波浪力中的拖曳力分量;
FM—为波浪力中的惯性力分量;
Fl——为破碎波力的冲击力分量。
拖曳力和惯性力根据水面的高度和波周期随着时间变化,可运用更高阶的波浪理论来分析拖曳力 和惯性力。
考虑到圆柱体处于破碎波环境中,冲击区域可以定义为如图D.1所示。
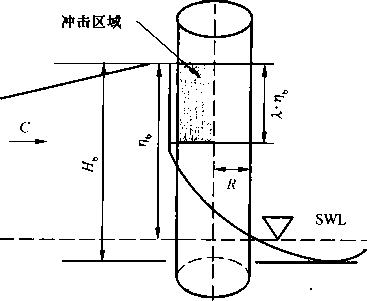
说明:
C —波速;
Hb——在破碎波区域的波高;
% --自由水面的最大高程;
R——圆柱体的半径;
A——卷曲系数,约为0.5。
图DJ破碎波和圆柱体的参数
当水流不是垂直撞击,而是以一个斜角7撞击圆柱体时,圆柱体的横断面应按椭圆形考虑;当圆柱 体是倾斜的或者上卷的破碎波尖倾斜(即在波峰下)撞击竖向的圆柱体时,该方法也适用。
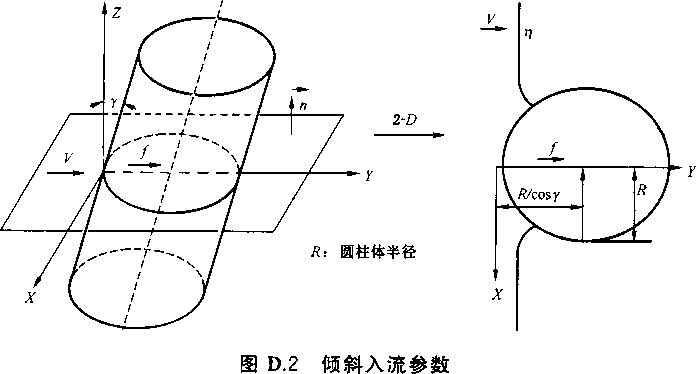
冲击力FI可以由下列公式计算:
FI
Fl =ληbpRV2 COSZy
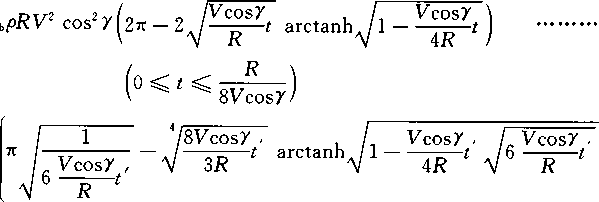
(D.9 )
......(D.10 )
(3R , 12R , = R \
(32VCoSy d ' W 32 VCOS/'' ='一 32 VCoSy 丿
总的冲击时间可表示为:
13R
32VCOSy
(D.11 )
式中:
7 ——水质点的运动方向与垂直于圆柱体轴线的方向之间的夹角;
cos/= 1——波浪在直立的圆柱体上发生破碎时;
cos7<l——上卷的破碎波尖冲击直立的圆柱体,或波浪在倾斜的圆柱体处破碎时;
P —水密度。
应注意到,卷曲因子人随着圆柱体相对波向的倾斜度而增加。当圆柱体与波向间的倾角近似于 25°时,冲击力最大。
wws^鞏tf≡
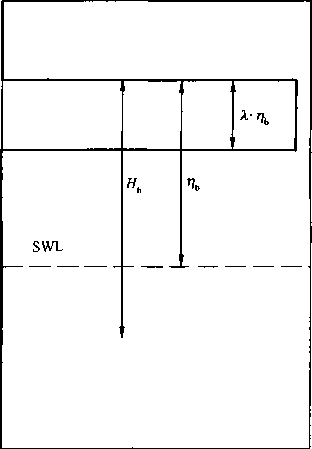
O 2π
FliPRC2
图D.3最大冲击线载荷的高度分布(y = 0°)
D.5涡激振动
水流经过非流线体(如圆柱形的桩柱)时形成和脱落的涡流,对结构产生动态载荷作用,该类载荷的 主要危险是在结构的固有频率和激励频率之间可能引发共振。大幅且有破坏性的振动可能由复杂的共 振机制引起,当水流和结构运动的交互作用导致激励频率受控于响应频率且与之同步时,多数情况下会 发生共振。
涡流脱落激励是由压力波动和涡流在物体尾流中的运动引起的。尽管波动力主要与来流方向成直 角,但涡流脱落能产生与水流同轴的水动力,并且由涡流脱落引起的结构运动可极大地增加时均拖曳 力。涡流脱落产生的力是一种复杂的流体动力学现象,这种力在一个宽广的参数(定义水流和结构特 征)范围内敏感。尽管有相当多的研究,但整个过程仍较难理解,对载荷和响应的预测也要考虑相当多 的不确定性。关于由涡流脱落引起的水动力载荷的计算,见本附录参考文献[7]、[8]、[9]和[10]。
结构部件一般无法承受共振。因此,避免共振情况的发生,或釆取特殊方法来抑制机械装置的共振 尤为重要。相对载荷和响应,较大振幅所对应的频率更容易预测。
涡激振动可以由稳态流或长周期波浪(高KeUIegan-CarPenter数)的水流流速产生。
D.5.1水平流动的临界速度
脉动升力的频率随着流速而增加。若在临界流速时,脉动升力的频率七与构件的固有频率相同, 则会产生共振。根据结构现有的阻尼水平情况,可能会发生大幅度的振动。若流体可近似为定常流,即 KC数很大时,临界速度可由下式给出:
UCrit= ~ ..............................( D.12 )
式中:
/n --结构的自振频率,Hz ;
St ---StrOUhal 数。对于圆柱体,Strouhal 数为 0.2。
UCnt 5fnD ..............................( D.13 )
对于峰值水平流振动,运动的初始流速较低。此流速可以用折算速度Ur来表示:
Ur = TTJT ..............................( D.14 )
在StrOUhal数约为0.2对应的雷诺数下,对于峰值振幅,临界折算速度的值约为5。在超临界雷诺 数下,大幅水平流运动的起始流速可以根据UrQ3.7来计算。当Ul稍低时,低阻尼的结构可能会有 响应。
大幅水平流运动的起始流速通常取决于结构的质量和阻尼,以及置换的质量。包括上述影响的无 量纲“质量阻尼参数”奴可定义为:
式中:
——单位长度上的等效质量(参见本附录参考文献[4]);
a —结构阻尼的对数衰减率。
图D.4用奴和U,展示了大幅横流振动的发生条件。若这些条件不可避免,可以用护板、护索和整 流罩等装置来抑制激励。
2.5 -----------------1-----------------1-----------------1-----------------1-----------------1-----------------1-----------------1-----------------1-----------------1-----------------
加-IeSsW-s«

• ɪ B X+♦ - -
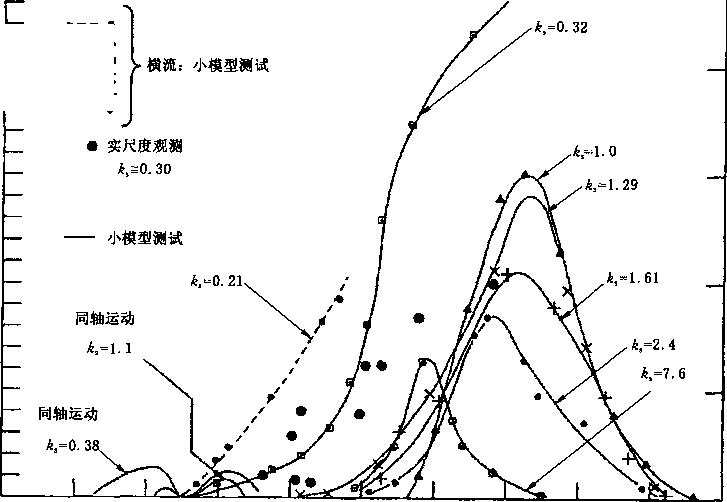
10
图D.4模型响应和全尺寸圆柱体的顺流和横流(引自参考文献[4])
D.5.2同轴运动的临界速度
频率为/ɪ的交替涡流脱落在同轴方向产生频率为2片的动态载荷。这种激励模式的临界折算速 度为:
Ur=2.5 ..............................( D.16 )
其他产生同轴振动的涡流脱落模式也应遵循该公式。最主要的一种模式是涡流同时成对脱落而不 是以常规的交替模式脱落,它具有如下更低临界流速:
Ur= 2.0 ..............................( D.17 )
对于一个给定的结构,同轴摆动的振幅一般不超过横流方向振幅的20%。
D.6附属装置
应该考虑到作用于结构附属装置(例如J型管、船只护舷、爬梯和走道等)上的水动力载荷。大的附 属装置,如J型管和船只护舷,通常可以模拟成独立构件。如果所模拟构件的尺寸和/或力系数可以反 映被忽略构件上的力作用时,则不必精细地模拟小的附属装置。
下面提出了一种通过计算等效水动力系数的简单方法来模拟作用于附属装置上的载荷。
D.6.1考虑附属装置和单桩上的海生物,估算水动力系数的方法
下面提出一种用于全局载荷分析的简单方法,其主要基于API的推荐作法2A-WSD (参见本附录 参考文献[11])。该方法通过计算等效水动力系数来模拟附属装置上的载荷。
该方法确定等效的拖曳系数和惯性系数(C奶和Cmeq)O当这些系数结合单桩的基本几何尺寸(直 径),并使用MOriSOnS公式,就可以得到含附属装置和海生物等的整个横截面上的总水动力载荷。
等效水动力系数是下列变量的函数:
•雷诺数(R);
•表面粗糙度(e);
•海生物厚度(7mg);
• KeUiegan-CarPenter 数(K );
•整体速度(Um)、波速(UW)和流速(UC);
•附件大小(4);
•附件在单桩上相对于波向和流向的方位(们);
•单桩和附属装置的间距。
J型管、船只护舷和停靠装置等附属装置可近似为直立的圆柱体(管),可按本附录参考文献[11]用 等效直径匕来表示。
总体原则是将特定构件上的相应载荷求和,并用单桩直径将其标准化来计算等效水动力系数。
在给定横截面上的等效水动力系数可按下式计算:
iɔ f Nl- It η I
Cdeq = j 訐ds (R 孵)・ WAFd(K) + 排昂•瞞(R ,e)・ WAFdI (KJ ∙ IFd,(们,K,∙) “
……(D.18 )
Crneq 'Cm (K ,C⅛s) + " * (1 + (Clni (K, ,Cdsi) — 1) ∙ IFm, >K,))]
……(D.19 )
甘由 P Um∙D'c, Um ∙ d,t Um ∙ T Um . T k
V V di D D
d i ≡ di + 2$mg ,∙D' ≡ D + ZtMQ
式中:
CdS CR,e)——稳态拖拽系数(仅为海流);
WAFd ——尾流放大因子;
IFd和IFnl——干扰因子,表示单桩引起的附属装置水动力系数的变化。
应注意,当DX 时,不必考虑单桩上附属装置产生的干扰。
尽管在很多实际应用中,忽略了水动力系数与R的相关性,但并非附属装置或疲劳分析均属这种 情况。因此,应将水动力系数对R的相关性考虑在内。
在浅水中,波动在整个水深上没有较大延伸,R和K可基于自由水面处的波动来计算。但通常采 用计算每一横截面的局部R和K值会更加准确。
干扰因子IF&和IFnu可以解释三种现象:
(1) 遮蔽效应,即减少作用于单桩遮蔽下附属装置上的水动力载荷;
(2) 间隙效应,即当附属装置和单桩之间的间隙很小时,作用于附属装置上的附加水动力载荷;
(3) 单桩侧的加速效应。
API的推荐作法2A-WSD (参见本附录参考文献口口)可用来计算遮蔽效应。尽管无计算间隙效 应的现成方法,但挪威船级社的30.5号注释(参见本附录参考文献[8])为近似无限长直壁圆柱体的水 动力系数计算提供了有效方法。圆柱体结构侧的加速效应,在大多数情况下可使用二维的势流理论进 行计算。
D.7计算方法
对于个别设计载荷工况,尤其是描述极端事件的设计载荷工况,应考虑下列所有效应:风和波浪载 荷的随机性、结构柔性和波浪的非线性。为同时考虑上述效应,应按D.7.1所述,使用非线性、不规则波 浪模型。由于这些模型不适用于常规工程,因此D.7.2、D.7.3和D.7.4给出了 3种可供选择的方法。
D.7.1显式方法
最精确的方法包括下列因素的显式模型:
•结构柔度;
•湍流风;
•不规则、非线性、短峰波。
在这种情况下,可使用不规则、非线性模型,如BOUSSineSq求解程序,来计算波浪运动。湍流场址 风场和结构动力计算模型与陆上风力发电机组进行时域模拟的模型相似。该方法的缺陷是:一些设计 载荷工况要进行长时间的模拟来获取最大载荷,波求解的收敛过程也很慢。
D.7.2波的非线性系数法
应用此方法仿真时应考虑下列效应:
•结构柔度;
•湍流风;
•不规则的、线性波浪。
可用一组载荷系数来说明波的非线性影响,该组载荷系数用于计算特定的风力发电机组和考虑的 条件。从时域模拟数据中可确定对应于最大载荷的风速和波高。根据这些条件,可用刚性结构结合(a) 70
GB/T 31517—2015/IEC 61400-3:2009
规则的非线性波、(b)规则的线性波进行附加仿真,以计算每个关注载荷的“波的非线性系数”。进而, 在最初的模拟中将所确定的最大载荷乘以这些系数。或在最初模拟时釆用放大的线性波,其中放大因 子按如下方式选择,即在(b)条件下放大的规则波和在(a)条件下的非线性波的最大载荷相等。
若无特殊要求,应将方向传播系数应用于二维波浪运动的水平分量中,以包括不规则波和规则波中 的方向传播影响。方向传播系数的说明见ISO 19901-1:2005中A.8.7.2o
D.7.3规则波方法
应用此方法仿真时应考虑以下效应:
•结构柔度;
•稳态风;
•规则的、非线性波。
首先釆用平静海况下的湍流风进行模拟,以确定所关注构件上的最大气动载荷。随后釆用稳态风 模型和规则的非线性波来模拟,此时风速应增加到设计值以上,直到气动载荷至少与之前湍流风模型所 得数值相当。模拟应不长于3个波周期,以避免支撑机构的非物理性极限状态响应影响到计算结果。
通过方向传播系数在二维规则波运动的水平分量中的应用,可以在规则波方法中计入方向传播的 影响。方向传播系数的说明见ISO 19901-1:2005中A.8.7.2o
D.7.4约束波的方法
应用此方法仿真时应考虑下列效应:
•结构柔度;
・湍流风;
•不规则的、线性波;
•规则的、非线性波。
这种情况下,通过在一系列不规则的线性波中嵌入一个非线性规则波的方法来计算波浪运动。湍 流风场和结构动力计算模型与陆上风力发电机组的时域仿真所釆用的模型相似。也可选择使用约束 “新波”法与拉伸法相结合。
通过方向传播系数在二维波浪运动的水平分量中的应用,可以在约束波方法中计入方向传播的影 响。方向传播系数的说明见ISO 19901-1:2005中A.8.7.2o
D.7.5 参考文献
[1] Elgar, S., Guza, R.T., and Seymour, R.J,, 1985, WaVe group StatiStiCS from numerical SimUlatiOnS Of a random sea, APPlied OCean ReSearCh 7 (1985) 2, p93-96.
[2] Morison, J.R., O'Brien, M.P., Johnson, J.W. and Schaf, S. A., 1950, The forces exerted by SUrfaCe WaVeS On PileS PetrOleUm TranSaCtiOnS, AIME, Vol. 189, PP 149-157.
[3] InternatiOnal Standard ISO 13819-2, PetrOleUm and natural gas industries一OffShOre structures一Part 2 : FiXed Steei structures.
[4] Barltrop, N.D.P., and Adams, A.J., 1977, DynamiCS Of fixed marine structures, Butterworth Heinemann, ISBN 0 7506 1046 8, available from the Energy Institute, London, UK.
[5] MacCamy, R.C., and FUChS R.A., 1954, WaVe forces in piles: A diffraction theory, Technical memorandum no. 69, BeaCh ErOSiOn Board, US NaVy COrPS Of Engineers.
[6] Wienke, J., DrUCkSChlagbelaStUng auf SChIanke ZyIindriSChe BaUWerke durch BreChende Wellen-SIamming an OffShOre Windkraftanlagen, Dissertation, TeChniSChe UniVerSitat Carolo-Wil-helmina ZU Braunschweig.
[7] Det NOrSke Veritas, CN 30.5 : EnVirOnmentaI COnditiOnS and EnVirOnnlentaI Loads, Classification NOteS No. 30.5, MarCh 2000.
[8] UK DePartlnent Of Energy, FIUid LOading On FiXed OffShOre StrUCtUreS—BaCkgrOUnd to the 4th edition Of OffShOre InStalIations: GUidanCe On DeSign and COnStrUCtion, OffShOre TeChnOlOgy RePOrt OTH 90322, 1990.
[9j DS410: COde Of PraCtiCe for LOadS for the DeSign Of StrUCtUreS (NOrm for IaSt PaO kon-StrUktiOner) J DaniSh StandardS ASSOCiation, 2004.
[lθ] GermaniSCher Lloyd, RUieS and GUidelineS IV—Part 8 Pipelines, 1 RUIeS for SUbSea Pipelines and RiSerSl 2004.
[11] API ReCOnImended PraCtiCe 2A-WSD (RP 2A-WSD) TWentieth Edition, JUly 1, 1993, ReCOmmended PraCtiCe for PIanningJ DeSigning and COnStrUCting FiXed OffShOre PIatfOrmS一WOrking StreSS Design,
附录E
(资料性附录)
冰载作用下海上风力发电机组支撑结构的设计
E.1引言
在冬季气候水域里,冰载荷是一种恶劣且关键的载荷工况。在北美、欧洲北部和亚洲北部的湖泊和 海域中,应对海上场址的覆冰情况进行评估。浮冰可引起支撑结构的极限载荷,并能导致海上风力发电 机组的灾难性事故。
本附录的制定主要基于参考文献[1]和[2]。
在评估冰载荷大小时,应考虑当地冰况、水位、冰的运动,及支撑结构的尺寸大小和类型。以下载荷 应予以评估:
•固定冰盖中由于温度波动引起的水平载荷(冰热压力);
・固定冰盖中由于水位波动和拱效应产生的水平载荷;
•浮冰移动产生的水平载荷;
・堆积冰和冰脊中由于潜没和隆脊产生的压力;
•固定冰盖中由于水位波动产生的竖向力。
E.2概述
若未进行详细的统计分析,通常假定冰载荷发生在正常水位范围内的任意水位。对于包含锥体在 内的结构来说(对水位比较敏感),应收集冬季条件下水位波动的统计数据来确认设计水位范围,以便确 定锥体的高度。本附录中的支撑结构假定是圆柱形或矩形的水线横截面,包括由混凝土或钢制成的直 立圆柱体和锥体。
在湖泊和靠近岸线的海洋中,通常冰盖增大到一定厚度后不再移动。应验算此厚度的浮冰产生的 载荷。由于冰盖的长期增长,应检验更厚冰盖的热压力、阀效应和竖向升力产生的载荷。
在可能存在浮冰的区域,应对所有季节计算浮冰产生的载荷,并考虑盛行流向和风向的作用。应考 虑到风向与冰运动方向无关的可能性。通常需要对载荷工况进行动态的时域模拟。应研究冰破碎频率 和海上风力发电机组的固有频率及风电场中其他风力发电机组固有频率动态锁定的可能性。模型试验 可作为评估的一部分。
E.3冰厚度的选择
冰的厚度h应通过当地冰图或类似文件(参见本附录参考文献[7])的统计数据分析来确定。通常 情况下,应对冰厚度及其抗压强度进行组合分析。对于远海中的风力发电机组,可选相应于50年重现 期的厚度。对于群岛和闭合水域中的风力发电机组,浮冰的厚度可选为与“正常冬季”相符,固定冰盖厚 度可相应于50年重现期选取。
冰冻期末期的冰厚度可按式(E.1)估算:
h = 0.032 √0.9Kmax -50 ..............................( E.1 )
式中:
KmaX——冰冻期(度-日)内低于O °C的24 h平均温度的绝对值的总和3>,gP:
天救l l
E.4载荷工况
若下列载荷工况与场址有关,则应釆用。风况和水位情况的说明见表2。可根据第12章的要求评 估上述条件,以便确定合适的特定场址数据和下列载荷工况的海冰载荷组合。可不考虑波浪。载荷工 况El、E2、E3、E5和E6是极限载荷工况,E4和E7是疲劳载荷工况。动力载荷的确定见E.4.6。
E.4.1固定冰盖中由于温度波动产生的水平载荷(DLC El)
在湖泊和微咸海域中,应只考虑冰热压力。在盐度较大的远海,如北海中,可忽略冰热压力。
风电场中海上风力发电机组支撑结构的外部,单侧的冰热压力最大,应假定其沿陆地往远海的方向 或从风电场的中心沿径向向外辐射作用。若破冰设备在热压力下穿过固定冰盖开岀一条通道,则冰将 向凿开的通道膨胀,并产生热力。
热力可按式(E.2)估算:
Ht =ftD ..............................( E.2 )
式中:
D--水位线处支撑结构的直径,若DV4 m,则D取4 m;
ft--支撑结构单位宽度上的力,kN∕mo .
对于孤立的或风电场中位于外围的支撑结构,儿取300 kN∕mo对于外层排列后面的或风场内部 的支撑结构,兀取IOO kN∕mo
E.4.2固定冰盖中由于水位波动和拱效应产生的水平载荷(DLC E2)
由海上风力发电机组支撑结构之间或支撑结构和海岸之间的拱效应产生的单侧水平压力,可按式 (E.3)估算:
HV =∕vL> ..............................( E.3 )
式中:
D 水位线处支撑结构的直径,若I)V4 m,则D取4 m;
fv---取 200 kN/m。
E.4.3浮冰移动产生的水平载荷(DLC E3, E4和E7)
巨大的浮冰产生的载荷应按E.4.3.1或E.4.3.2中的方法来估算。其中DLC E3中极端风载和极端 冰载组合的外推法参见E.6o
DLC E7中,海上风力发电机组处于停机状态,浮冰对支撑结构和塔架产生疲劳载荷。
E.4.3.1直立的圆柱形
此方法来自于本附录参考文献[1]和[3],适用于直立圆柱形的结构。挤压产生的最大静力可按式 (E.4)估算:
Hi = k1kik3hDσ, ..............................( E.4 )
式中:
kλ——冰撞击侧支撑结构的形状系数;
k2—— 冰与支撑结构的接触系数;
k3——冰厚度和支撑结构直径之间的比例系数;
D——水位线处支撑结构的直径;
<7c --冰的抗压强度。
冰的抗压强度U
冰的抗压强度应由统计数据或αM的乘积确定。为了对参考的抗压强度进行统计分析,应根据实 际的温度和盐度来修正现有的数据,参见本附录参考文献[7]。
若无当地可用的冰数据,冰抗压强度值可从下面典型的北波罗的海和加拿大北极区的数据中 选用河:
σc = 3.0 MPa,适用于在全年最冷的时候沿风和海流方向运动的冰;
U = 2.5 MPa,适用于由于热膨胀或收缩产生缓慢运动的浮冰;
σc = 1.5 MPa,适用于在融点温度附近开裂的冰;
σc = 1.0 MPa,适用于在融点温度附近部分融化的冰;
σc=0.5 MPa,远海中第一年盐水冰,如在北海。
形状因子k1
形状因子払的取值如下:
加=1,矩形;
kl =0.9,圆形。
接触因子& 2
接触因子说明连续撞击状态下冰实际上并未与整个支撑结构的名义表面Dh相接触,冰完全冻结 在支撑结构上的运动初始阶段外除外。
当冰连续运动时^kZ =0.5;
当冰冻结在支撑结构表面上,并开始运动时,龙2 = 1;
支撑结构基础附近冻结的冰的厚度局部增加时,奴= 1.5。
对于第三种情况,可釆用与支撑结构相邻的冰的厚度来替代厚度∕l,而不是用原状冰源。
纵横比例因子奴
纵横比例因子奴考虑了接触点处的三维应力状态。若桩基或塔架与冰盖的厚度相比很细,则可考 虑二维应力状态。奴可由下式计算:
k 3 =λ∕1 + 5AID
载荷作用高度
若支撑结构附近有冰堆积的风险,则载荷作用的高度应增加0.2倍的水深(水深低于6 m时)。
模型试验校准
模型试验表明,力的等级和类型完全依赖于是否发生连续撞击或是否出现不稳定的膨胀模式,参见 本附录参考文献[9],而并非很大程度上依赖于冰速产生的峰值力水平。模型试验的更多说明见E.7o
26)依据加拿大桥梁标准(1978)选取了以上参考值,该值在0.7 MPa~2.8 MPa范围内。苏联标准(1976)规定范 围是0.44 MPa~1.47 MPaO可以看出,上面给出值是偏保守的。
E.4.3.2倾斜形状
该公式由RalStOn于1977年提出,参见本附录参考文献[2],该式适用于倾斜结构,如带有冰锥的 风力发电机组塔架。该公式也在本附录参考文献[5]中被APl推荐釆用。该公式适用于水平测量倾斜 角α在0o~70°范围内的锥体。本附录参考文献[9]中提到的模型试验,表明RaIStOn公式给出了一个 冰速小于Im/s的锥体上的冰力安全值。
由向上锥弯曲的冰作用的水平载荷可按式(E.5)计算:
H=A4 [_AiOih2 + A2pghD2 -∖- A3pgh (D2 — DT) J ............( E.5 )
竖向向下的载荷:
V = BlH + BiPgh (D2 — ) ..............................( E.6 )
式中:
A^A^A^A^Bl和B?——以冰-锥体摩擦系数“和锥体倾斜角α为函数的无量纲系数,系数可 从本附录图E.1中查得;
σι> ---冰的弯曲强度,不小于0.26σc ;
H 冰盖的厚度;
P —水的密度;
g --重力加速度;
D --水位线处锥体的直径;
DT ——锥体顶部的直径(等于塔架直径)。
对于受冰层向下弯曲作用的锥体,将上式中P变成p∕9,竖向力变成向上的方向后,也可釆用上式 计算。
对于受冰层向上弯曲作用的锥体,若锥体高度超过冰层至顶部的厚度,或者对于受冰层向下弯曲作 用的锥体,若锥体高度超过冰层至底部的厚度时,也可釆用上述公式。原则上,锥体的设计应确保除锥 体本身之外,冰层不会在支撑结构的其他任何部位上产生挤压。应评估作用于圆锥形结构外部的冰撞 击载荷产生的风险和后果(如水位波动)。
对于双面锥体,除了直接作用于顶部的载荷之外,其他力可按上述方法来估算。对于尖顶,水平载 荷应增大至2倍,对于圆顶,水平载荷应增大至3倍,参见本附录参考文献[9]。
冰-锥体的动摩擦系数可取为:
对于混凝土或锈蚀钢的锥体,μ = 0.15;
对于新钢或涂漆钢的锥体,μ=0.10o
E.4.3.3局部冰压力
支撑结构的设计应满足下列局部冰压力公式:
crc,ɪoeaɪ = σc (5∕j2 /A Ioeal — 1)0'5 V 20 MPa..............................( E.7 )
式中:
AIOCaI——所考虑的局部面积。
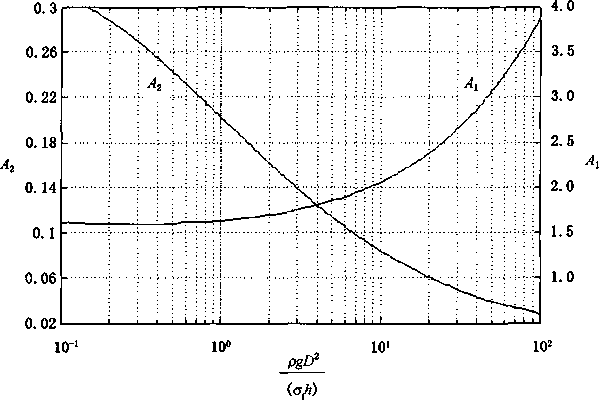
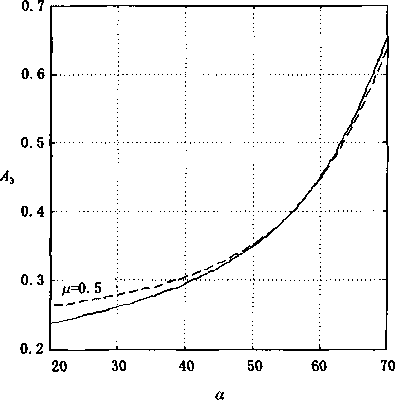
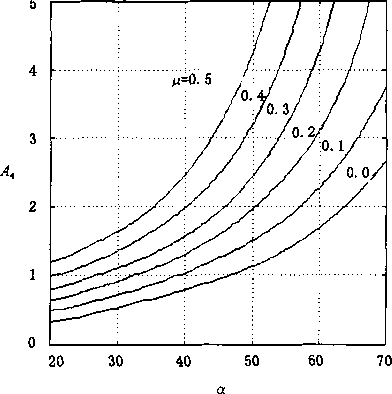

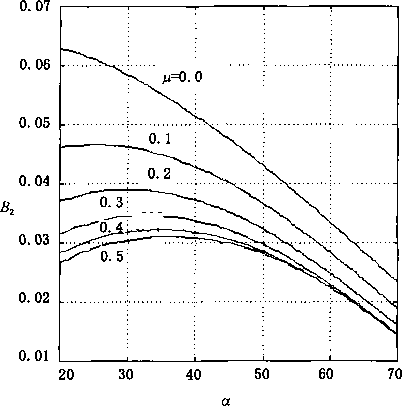
图E.1用于塑性极限分析的冰载荷系数(引自参考文献[6])
E.4.3.4风和水流产生的载荷
风和水流在浮冰上产生的载荷可按式(E.8)估算:
U2
H=CdiOyA ..............................( E.8 )
式中对于风:
Cd = 0.004 ;
(O = I.3 kg∕m3 ;
U—冰面以上Iom处的自由气流速度。
对于水:
Cd =0.006 ;
(O=I 000 kg∕m3 ;
U—冰面以下1m处的自由水流速度;
A—浮冰的面积。
风载荷和水流载荷最高不超过冰的抗压强度。风和水流联合产生的漂移力应基于场址区数据的统 计分析。
E.4.4固定冰盖产生的竖向载荷(DLCE5)
固定冰盖冻结到支撑结构上时,由水位波动产生的竖向载荷受到粘附在支撑结构表面的剪切强度 K的限制,或冰在支撑结构周围环形破碎时,受到抗弯强度Vb的限制。两种限制中较低的值是起决定 作用的,应使用该值。
Vt=Ar ..............................( E.9 )
式中:
T——粘附剪切强度,kN∕mzi
A—圆形竖向支撑结构的接触面积,A=πDh,m∖
粘附剪切强度r可取如下值:
对于钢-淡水冰/可取为0.8 MPa;
对于钢-咸水冰,r可取为0.3 MPa,参见本附录参考文献[12];
对于混凝土-咸水冰,τ可取为1 MPa,参见本附录参考文献[8]。
Vb= 0.6A √σb∣og∆2 ..............................( E.10 )
式中:
A——接触面积;
<τt ---冰的抗弯强度,不小于0.26<7“
P —水的密度;
g --重力加速度;
∆z--水位差。
E.4.5 冰脊压力(DLCE6)
DLC E6包括了极端冰载荷和重现期为1年的极端风况的组合情况。应釆用对支撑结构产生最大 剪切载荷的风载荷。
如果冰脊粘附在移动的冰盖撞向支撑结构,将产生非常大的载荷。这些冰脊由碎冰组成,也包含冻 结在一起的2 m~3 m厚的固结碎冰。在固结碎冰上下的松散冰块对冰载荷的贡献很小。
可运用冰被压碎或冰脊在水平面内弯曲失效的假设来粗略地估算冰载荷。一般不建议将海上风力 发电机组安装在有冰脊风险的区域。
E.4.6动载荷
应检验海上风力发电机组是否受到冰载荷产生的动力影响。若无统计数据或实测数据不可用时, 可使用下列折算公式模拟动力载荷。
在竖向支撑结构上移动的冰盖产生的载荷变化,可近似为竖向交变的正弦曲线,如下所示:
Hdynv = Hd ɪ + ysin(^^z) J ..............................( E.11 )
式中:
Hd——浮冰产生的水平载荷,按式(E.4);
t ——时间;
/n ——海上风力发电机组结构的固有频率,应检验第1阶和2阶模态。
当发生屈曲失效时,动力效应达到最大,导致冰载荷出现强烈波动,参见本附录参考文献[9]和 ClllO
调谐准则如下参见本附录参考文献Eio]:
U
-~ > 0.3 ..............................( E.12 )
h・j n
式中:
U——浮冰速度;
h --冰盖厚度。
在圆锥形基础上(锥体倾斜角σ≥30°)移动冰盖产生的载荷变化,可近似为竖向交变的正弦曲线, 如下所示:
ʃʃ dynk =Z d
(E.13 )
式中:
Hi——移动冰盖产生的水平载荷,按式(E.4)计算;
t ---时间;
fi=U∕Kh ,U为浮冰的实际速度,4≤κ≤7,应选择产生最大载荷的K值。
或者可假定动力载荷(包括竖向圆柱和锥体)为三角形的曲线,见图E.2。
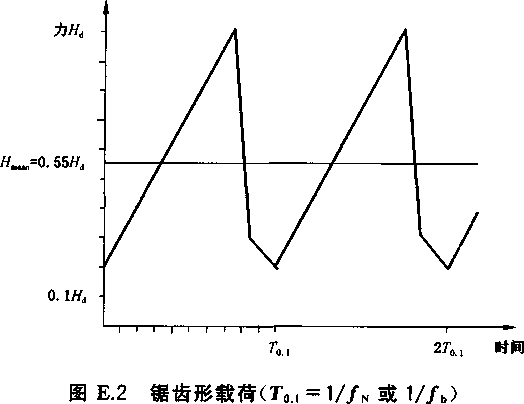
应用下列瞬态载荷法来检验大型浮冰冲撞产生的载荷。
Ud
HQ)=RUt tV W
kU
'0
H
H(t)=< t > ―^- ..............................( E.14 )
kU
Hd
式中:
U--冲击速度;
t --撞击的持续时间;
k——水位线处结构的刚度。
E.5随机仿真的要求
由于受冰场监控质量的许可限制,通常要求基于响应仿真,并主要用下面E.7所述冰模型试验。从 此模型试验中,得到描述随机冰载荷的时间序列是可用的。因为冰模型试验通常只生成对应数分钟原 型载荷的载荷时间序列,要求釆用本附录参考文献[9]中的方法延伸所测的时间序列,以获得大量的统 计上近乎独立的动态冰载荷的IO min仿真。
另外,在风力发电机组动态模型中,模拟独立的冰载时间序列和风荷载。评估与运行风载及极端冰 载组合的10 min事件数量(N)。可对GB/T 18451.1-2012附录F的要求修正后,评估推算的极限载 荷,附录F中式(F,6)使用的不是50年重现期10 min事件数量的倒数,而是在50年重现期浮冰运动期 间内,运行风速的10 min事件数量的倒数。
E.6模型试验的要求
模型试验可釆用人造冰进行。通常情况下根据FrOUde模型定律对结果进行缩放,其中力通过人3 缩放,弯曲和撞击强度通过人缩放,时间通过人°』缩放。
为模拟冰载荷和结构的动态耦合,应正确地模拟受冰载荷影响结构的共振频率、阻尼和刚度。
对于动态耦合受限的锥形结构,可用刚性模型试验来生成动态冰载荷施加在支撑结构上。对于竖 向结构,在冰载荷与结构振动间可能发生强烈的动态耦合,应将其作为模拟的一部分,该情况下对相应 共振频率、阻尼、刚度进行模拟尤为重要,其可使浮冰速度和结构振动速度之间的比率得以正确建模。 对于典型的海上风力发电机组支撑结构,通常是第2阶共振模态引起冰载作用动态耦合。
模型试验的特有要求、相关结果和设计程序参见本附录参考文献[9丄
E.7参考文献
[1] Bergdahl, Lars: ISIaSter Pa VindkraftVerk till HaVS) DimenSiOneringSrekOmmendatiOner (in SWediSh) DePartment Of Water, EnVirOnment Transport, Chalmers, RaPPOrt nr 2002:1. (ICe LOadS on Wind TUrbineS at Sea) ReCOmmendatiOnS for Design).
[2] Christensen, FIemming ThUnbO and Gravesen, Helge: DeterminatiOn Of EXtreme ICe Forces, LeCtUre Notes. 2003.
[3] Haapanen, E, Maattanen, M and Koskinen, P; OffShOre Wind TUrbine FOUndatiOnS in ICe InfeSted Waters. PrOCeedingS OWEMES COnferenCe 1997.
[4] LofqUist, BertiI: IStryCk mot bropelare (in SWediSh), VagVerket 1987. (ICe PreSSUreS at bridge columns.
[5] AmeriCan PetrOleUm Institute, API: Planning) DeSigning and COnStrUCting FiXed OffShOre StrUCtUreS in ICe Environments. BUiletin 2N, API, SeCOnd Edition, 1995.
[6] Ralston, T: ICe FOrCe DeSign COnSideratiOnS for COniCal OffShOre Structures. POAC 1977.
[7] Christensen, F.T. and SkOUrUPJ J: EXtreme ice PrOPerties, Journ. Of COid RegiOnS Engineering, Vol. 5, No. 2, June, 1991, PP 51-68.
[8] Cammaert, A.B. and Muggeridge, D.B: ICe interaction With OffShOre structure. Van Nostrand ReinhOId. NeW York, 1988.
[9] GraVeSenJ H., Petersen, B., Sorensen, S.L., and Volund, P: ICe forces to Wind turbine foundations in Denmark. PC)AC'03, Trondheim. Norway, 2003.
[10] Singh, S.K., Timco, G.W., Frederking, R.M.W., and JOrdam) L.J: TeSt Of ice CrUShing On a flexible structure. 9th Int. Conf. On OffShOre MeChaniCS and ArCtiC Engng, Vol. IV, PP 89-94, 1990.
[11] Yue, Q. > & Bi J X., : ICe-IndUCed JaCket StrUCtUre VibratiOnS in BOhai Sea, JOUrnal Of COld RegiOnS Engineering, Vol. 14, No. 2, JUne 2000 J ASCE.
[12] OkSanen P: AdheSiOn Strength Of ice, VTT, ESPOO) FinIand 1982.
E.8冰况参考资料
[1] CiimatOIOgiCal ICe AtlaS for the BaitiC Sea, Kattegat, Skagerak and Lake Vanern. Sjofartsverket, S-601 78 Norrkoping, Sweden.
[2] The NatiOnaI ICe Center, USA (NATICE): WWW.natice.noaa.gov.
[3] The NatiOnal SnOW and ICe Data Center, USA (NSlDC) : www.nsidc.org.
[4] NOAA Atlas, ArI EIeCtrOniC AtIaS Of Great LakeS ICe Cover: WWw.glerl.noaa.gov∕data/ ice/atlas.
[5] Canadian ICe Service: http://ice-glaces.ec.gc.ca27).
27)该网站是加拿大环境官方在线资源(关于加拿大水域的海冰和冰山)°
附录F
(资料性附录)
海上风力发电机组的基础设计
关于海上风力发电机组基础设计的具体指导可参考下列文献:
[1] GermaniSCher LlOyd WindEnergie GmbH, RUleS and Guidelines: IV一IndUStriaI Services, Part 2一GUideline for the CertifiCatiOn Of OffShOre Wind Turbines.
[2] DNV OffShOre Standard, DNV-OS-JIOI, DeSign Of OffShOre Wind turbine structures.
附录G
(资料性附录)
用于极限强度分析的海洋气象运行参数的统计外推
G.1概述
本附录说明了环境海洋气象参数的外推方法。对于将长期海洋气象参数外推到50年重现期的相 对值,不需考虑给定的海洋气象参数的响应波动,例如,忽略给定平均风速、湍流强度和有义波高1 h最 大响应的随机波动。因此通过先推求长期海洋气象参数再进行响应计算以确定50年重现期的响应,与 对所有相关的海洋气象参数进行响应计算之后再适当考虑海洋气象参数长期分布影响的方式相比,推 求结果往往不同。但如DLC 1.6a和1.6b所要求的只推求外部条件的方法,可为DLC 1.1所要求的全 响应外推提供有用的补充。本附录说明了海洋气象参数外推的一般方法,即反向一阶可靠度法 (IFORM)(参见本附录参考文献[口),其用于确定DLC 1.3使用的极端湍流模型的湍流强度。
IFORM给出了环境等值线定义,在某种意义上,即给出了平均风速V和有义波高HS的50年重现 期的组合。确定环境等值线后再沿等值线观察,以确定在哪一个点上极端响应的条件期望值变为最大。 此点的极端响应就是50年重现期响应的估算值。根据非线性波浪运动和波浪载荷动态放大的重要性, 极端响应的条件期望值可由多个动态模拟的伪随机响应时间序列,和/或者由基于规则波的准静态响应 计算来确定。为此,6.4.1.4中定义了极限波高。在本附录最后讨论了极限波高(SWH)的估算方法。
G.2运用IFORM测定平均风速条件下5。年重现期的有义波高
IFORM要求使用平均风速V(有适当的平均周期)和有义波高HS的联合分布模型。IFORM的结 果是联合分布的环境等值线。为了构造该环境等值线,需要对两个不相关的标准正态分布变量S和 U2进行概率转换,变成联合分布的一对(V, Hs):
(V,Hs) = φ(Ul,U2) ..............................( G.1 )
这种转换通常采用所谓的Rosenblatt变换:
①(Ul)=FV (V)
Φ(U2)=Fh5 (HjV) ..............................( G.2 )
式中:
Φ ——标准正态累计分布函数(CDF);
FV(V) ——平均风速的边缘CDF;
FHS (HSw)—平均风速下的有义波高分布。
ROSenblatt变换的优点是简单,它以一种简便的方法将FV(V)和FHa(HSIV)两分布表示为联合 分布。这样,所要求的概率转换变为:
V = F^1[Φ(U1)]
HS=F^Φ(Uz) I V] ..............................( G.3 )
通过运用式(G.3)的转换,可根据下列过程获得环境等值线:在U1-U2平面上,半径为β的圆(即 满足方程U f+U;=伊的点),可以转换成V-HS平面内的曲线,此曲线即为环境等值线。其中半径戶由 下式确定:
φ(∕3) =1-1 ..............................( G.4 )
式中:
N——50年内独立海况数目。
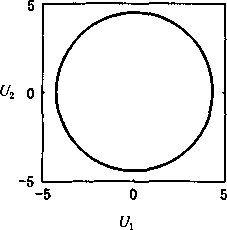
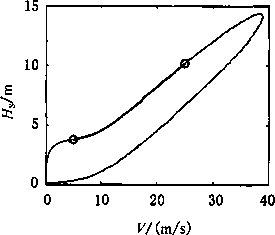
图G.1持续时间为3h海况构造50年环境等值线的示例
对于持续时间为3 h的海况,N = 5O×365X24/3= 1.46XlO5,则β^4.35,对于持续时间为1 h的 海况,jβQ4.60°图G.1给出一个持续时间为3h海况的例子。通常,无需确定整个环境等值线。对于 给定的平均风速,仅需关注在运行范围内给出了最大有义波高(称其为恶劣海况或SSS)的那部分环境 等值线,因为在此可获得最大平均极端响应。该部分环境等值线可不采用近似法来确定,应可按如下方 式获得确定:对于运行范围内的每个平均风速V,应首先用下式来估算标准化的变量LA :
UI =Φ~1 [Fv(V) ] ..............................( G.5 )
其次,与V相关的有义波高H5,sss(V),由以下公式得到:
Hs,sss(V) =F讯[①弗2 —5 I VJ ........................( G.6 )
图G.1中小圆之间的环境等值线的粗线部分即是由式(G.5)和式(G.6)得出。
由于该方法在很大程度上取决于平均风速和有义波高的联合分布模型,因此应对该模型的适用性 拟合度进行统计或观测试验。联合分布模型应包括可能的上限对有义波高的影响。若不清楚模型中是 否包含此影响,那么则在确定环境等值线之后,可附加一个上限,以避免过大的估算Hs,sss(V)o
G.3 V和HS的联合分布以及环境等值线的近似值
下面提出了两个在多数情况下其与实际数据符合较好的联合分布模型。这两种模型的优点是可以 获得用于近似式(G.5)和式(G.6)的简单解析表达式。这些表达式取决于几个可能在多数情况下被可 靠估算得出的统计参数。需注意,上述统计参数的可靠估算并不能保证环境等值线的可靠估算。因此 须对所选模型的适用性进行测试。若模型通过了测试,则其所提供的表达式即可对环境等值线做出可 靠的估算。
第一个分布模型假定是基于V的正态分布。则有:
FHS(HS I V)=φ(hs~^^) ........................( G.7 )
∖ σHa (V) /
式中^HS(V)=ECHS I V],σHS(V)=DEHS丨V]分别是V条件下H,的平均值和标准偏差。在此 情况下,式(G.6)变为:
ʃʃ S t SSS = ZZHS (U) + J皆 一 Uf gs (V) ........................( G.8 )
通过去掉勺的平方,可以得出式(G.8)的保守近似值,如此获得简化的公式:
H s,sss ZZHS (U) ~∖~ βσHs (V) ..............................( G.9 )
V与HS的关联程度越高,平均切岀风速与重现期为50年的平均风速差异就越大,式(G.9)就越接 近式(G.8)o
第二个分布模型假定HS为V条件下的对数正态分布,则有:
FHS(HS I V) =φ(lnHS (V^ ............( G.10 )
∖ (TInHS (V) f
^InHa =Irψ % (V) — InJl +CθVHS (V)2
σι∏Hs = λ∕1π( 1^-∣-CoVhs (V)2 )
σH (V)
COVHS (V) = " ..............................( G.11 )
应用式(G.10),将式(G.6)变换为:
Hgs = exp M (V) + 睥一叩皿(V)) ............( G.12 )
通过式(G.11)的泰勒展开,省略式(G.12)中的S的平方项,可得到式(G.12)的保守近似表达: HqSSezZfG(V) ∙ exp(BCoVh,(V)) ........................( G.13 )
V和HS之间的相关性越大,平均切出风速和50年重现期的平均风速之间的差异就越大, 式(G.13)也就越近似式(G.12)o通过再引入Ul的平方,即用丿伏一Uf来代替们式(G.13)可获得显著 改进。
在大多数情况下,可对条件平均数^HS(V)=E[Hs∣V]和标准差σHSV) = DLHs∖V^]进行可靠估 算。对拟合度适用性进行观测试验或统计试验时,要求数据多于估算^HS(V)和。h, (V)的数据,但最终 还需进行评判,以确保结果是保守的。应注意,当给定相同的数据集时,对数-正态模型相比于正态模型 来说是保守的。如果无法估算EEHSIV]和和/或不能保守地选择分布模型,则作为Hs.sss (V)的保守估算方法,可使用与平均风速无关的由HS的边缘分布确定的50年重现期极大有义波高 H,* ,以及与构造环境等值线时相同的海况持续时间。
用正态分布模型和对数-正态分布模型来准确地说明有义波高在较高平均风速时的可能上限值或 许存在一定困难。因此应注意,为避免过大地估算H5.sss(V),可以规定一个上限,例如,50年重现期的 海况持续时间与构造环境等值线时使用的海况持续时间相同的极大有义波高H55Oo
G.4海况持续时间的选择
很难给出选择海况持续时间的确切指导,因为恰当的选择与特定的场址有关。在此仅对此问题作 简短介绍。
海况定义是以假定海平面升高的过程平稳为条件的。由于海况的持续时间一般大于或等于1 h, 因此选择10 min的持续时间与风速的基准期匹配存在困难。若选择10 min为周期,则很有可能所寻 求的风力发电机组在正常风况下发电时所发生的50年重现期的极端响应,出现在10 min海况中,而非 恶劣海况(SSS)O因此,在这种情况下,恶劣海况的有义波高需要被放大(增加)。如选择比海况实际持 续时间稍长的时间可减少此上述问题。可能很重要的设计状态是在风暴结束时,波浪仍很恶劣,但是风 速已经降低到允许风力发电机组启动,在此情况下,运行的气动载荷和水动力载荷的组合可通过确定环 境等值线来分析。若选择10 min的持续时间,且H,,sss未明显放大,那么该重要载荷工况中的波浪载 荷作用可能被低估了。
通常,测量或追算的海洋气象数据是通过1 h的数据来获得,即每小时进行一次海洋气象数据观 测。如果有风力数据,那么获得的Ih数据通常记录为1 h平均值,即为在平均周期为1 h的平均风速 值。或可使用10 min的平均风速数据,转换成Ih或3 h的数据。以下简要介绍该转换对V和HS联 合分布的影响。当考虑平均风速的长期边缘分布时,平均周期分别为10 min、l h和3 h的风速分布是 有所不同的。随着基准期的增加,边缘分布的标准差略微降低,但平均值保持不变。的长期边缘分 布不变,因为其定义与取样间隔和基准期无关。
由于在风的影响下,波浪的形成要经过一段相当长的时间(以小时计),V和HS的相关性可能随着 基准期的增加而增强。但取决于场址的具体特点,相关性可能不会随着平均周期发生很大变化,因此假 定VkUb ,Hi和TP的长期联合概率分布与基准期无关是合理的。
G.5极限波高(SWH)的确定
极限波高HSWH(V)是有义波高H5,sss(V)在恶劣海况下的极大值。根据恶劣海况的定义,海况最 大响应的期望值,需出现在环境等值线的对应点上,因此HSWH应是恶劣海况可能出现的最大波高期望 值。在很多海上应用中,最大波高的分布模型釆用极大波高。该模型比期望值稍小,但对于现阶段应 用,允许使用该模型来代替期望值。
如果已知波高分布F(H∣Hs),通过以下关于HSWH的公式就可能得到Hswh(V):
F (HSWH IHS=Hs,sss (V) )=1 ― — ........................( G. 14 )
式中:
M——恶劣海况下海浪的平均数。
式(G.14)给出了分布模型。如果波高分布F(HIH5)是未知的,可假设波高服从瑞利分布(基于深 水区海面沿一个狭窄带上升的假设),Hswh(V)可以由HMSS(V)得到。对于持续3 h的海况,Hswh(V) 按下式计算:
HSWH(U) Q L86Hs,sss(V) .......................*......( G.15 )
若基于HS的波高分布不能很好地用瑞利模型来表示,如受到水深的限制,则式(G.15)可能无效。 若使用式(G.14)或式(G.15)没有足够的数据来确定Hswh(V),则50年重现期的与V无关的无条件限 制的极大波高可用作HSWH(V)的保守值。
G.6参考文献
eɪɔ WinterSteinJ S.R., Ude, T., Cornell, C.A., Bjergagerl P. and Haver, S.: 'Environmental ParameterS for extreme response: InVerSe FORM With OmiSSiOn factors S ICOSSAR ? 93, Innsbruck, 1993.
附录H
(资料性附录)
腐蚀防护
Hl概述
海上风力发电机组暴露于恶劣的海洋腐蚀环境中,受可达性制约,其检查和维护也常受限制。因此 海上风力发电机组需特别注意腐蚀防护,如材料的选择、设计考虑、腐蚀防护系统、适当的检査和维护 计划。
腐蚀损伤会影响结构的完整性,降低构件的承载能力。腐蚀防护的目的就是预防此类损伤发生在 疲劳和极限载荷敏感区。对于疲劳,腐蚀损伤可导致应力集中,引起疲劳裂纹。对于极限载荷,腐蚀防 护可避免结构承载能力的降低。对于疲劳设计,当全面的腐蚀防护系统(就位且此该系统具备适当的检 查和维护计划)就位时,可认为支撑结构没有无因腐蚀而受损坏损伤。海上风力发电机组结构部件、机 械部件和电子部电气部件的设计同样应该考虑到腐蚀对其功能的影响,如转动部位的连接部件的锈蚀 卡阻或传感器失效。
应根据公认的规范和标准,设计海上风力发电机组的腐蚀防护系统,并应注意,避免不同标准中分 析方法的混淆。
H.2海洋环境
腐蚀的特点是金属表面分解成离子形态,在电化学中,称之为氧化。此过程依赖于电解质提供的导 电离子。腐蚀过程受到下列主要海水参数的影响:
•含盐量及污染物种类及含量;
•含氧量;
・温度;
• 运动及流动。
海上风力发电机组可以分为以下区域以助理解其与海洋环境的关系:
・大气区;
・飞溅区或过渡区;
•全浸区;
•海泥区。
大气区包括飞溅区以上的完全暴露和半遮蔽区域。
飞溅区是指在潮汐和波浪作用下间歇被浸没的区域。它经常承受巨大的局部变化。
全浸区指飞溅区以下包括海水淹没的内部舱室。
海泥区包括被海床沉积物或土壤掩埋的构件。
全浸区上部和飞溅区下部通常受到海生物的影响。这种影响取决于这些海生物的类型、范围以及 当地的条件,它可能加速腐蚀,也可能减缓腐蚀。海生物同样也会破坏腐蚀防护系统,如涂层/衬套和阴 极保护。
在寒带,海冰的冲刷作用可移除能阻止腐蚀的氧化层、腐蚀防护涂层和海生物,进而提高腐蚀速率。
在热带,由于较高的平均温度和湿度使得海洋环境更为恶劣,因此腐蚀防护显得尤为重要。
H.3腐蚀防护注意事项
在设计使用寿命期内,腐蚀防护系统可阻止结构的腐蚀速度,或将其降到最低。实际上,完全阻止 腐蚀是很难的,但腐蚀速率可被降至最低。
可釆用下列腐蚀防护措施使腐蚀损坏最小化:
•根据公认的设计规范或标准选择合适的结构材料;
•正确的设计方法,如:可达性、正确的排水装置、移除边缘和缺陷以及其他考虑;
•通过涂层使金属材料与电解液隔离;
•防腐系统的定期检査及维修;
・电化学保护,如阴极保护。
H.4腐蚀防护系统
海上风力发电机组支撑结构的防腐系统可以分为两类:涂层保护,阴极保护。以下将按支撑结构的 不同区域讨论这两类腐蚀防护系统。
对于大气区和飞溅区,应在所有的金属表面应用符合标准和规范的涂层系统。其中飞溅区应特别 注意,此区域的涂层系统应更严格地适应海洋环境需求,满足支撑结构的使用条件,并且应评估其功效。
全浸区及海泥区也应釆取合适的保护方法,使结构能运行到设计使用期,否则应确保更换或修复的 可能性。如需更新,应该定期检查涂层是否损坏。
对于永久密封的内部空隙,如箱形梁、管座等无需内部防腐。装配期间需注意,在密封前应确保内 部清洁、干燥。对于永久浸没,不存在水交换或极少水交换的空间,腐蚀防护要求也可降低。
所有涂层系统均应进行定期检查和维修,以确保其在设计使用期内的完整性。如果检査频率降低, 应该特别注意涂层是否符合标准的要求。同时也应注意,单纯的涂层合格证明并不能保证它在设计使 用期内的性能完好,因此选择涂层时,还应该根据此产品在同类工程应用中的情况确定。
此外,全浸区应该有阴极保护。通常,阴极保护有牺牲阳极和外加电流两类。若阴极保护系统在结 构各部分的电流分布不合适,则建议在这些部分附加其他的涂层保护。应该避免阴极保护中无效的缺 口及区域,或者使用涂层保护来替代。对于能够入船坞进行彻底检查和维修的漂浮结构可以重新考虑 该要求。
采用腐蚀裕量代替腐蚀防护系统的方案仅限于非关键构件、设计寿命较短的结构、计划定期检査或 维修的区域。在ISO/CD 19902中,以北海中未做腐蚀防护的低合金钢或非合金钢为例,飞溅区每年的 腐蚀为0.3 mm,全浸区为0.1 mmo对于设计寿命为20年的结构而言,相当于飞溅区总的腐蚀为 6 mm,全浸区为2 mm,在极限状态分析中应考虑这些腐蚀裕度。
H.5风轮-机舱组件腐蚀防护
机舱位于大气区,也受到海洋环境同等腐蚀应力的影响,因此机舱应该考虑采取与支撑结构同等的 腐蚀防护。机舱应釆取密封的腐蚀防护措施与大气区隔绝。
机舱的所有金属表面,要根据公认的规范或标准应用涂层系统。以下是ISO 12944-2中推荐的环 境分类:
•根据C5-M保护外部元件、配件和传感器不受腐蚀;
•根据C4保护直接暴露于外部空气的内表面不受腐蚀;
•根据C3保护与外部空气隔绝的内表面不受腐蚀。
通常认为在相对湿度80%以上,会发生严重的腐蚀,因此机舱内部环境应通过环境密封及调湿加 以控制。风力发电机组的控制系统应该对环境控制系统进行监控,并做常规的定期维护。
另外,其他与外部空气直接或间接接触的内部部件(如轴承或齿轮箱的通气装置)及运行材料(如润 滑剂和润滑油),应该同机舱外部组件(密封圈、橡胶、软管等)一样作特殊处理,并设计为可经受海洋环 境腐蚀。外界环境可参照IEC 60721-3-3。
H.6参考文献
[1] DNV-OS-CIoI, DeSign Of OffShOre Steel Structures, General ( LRFD MethOd), APril 2004.
[2] DNV-OS-JlOI, DeSign Of OffShOre Wind TUrbine Structures. OCtOber 2007.
[3] DNV RP-B401, CathOdiC PrOteCtiOn Design.
[4] GermaniSCher LIOyd WindEnergie GmbH, RUleS and Guidelines: IV一IndUStrial SerViCes, Part 2 GUideIine for the CertifiCatiOn Of OffShOre Wind Turbines, 2005.
[5] GermaniSCher Lloyd, VI一AdditiOnaI RUleS and Guidelines, Part 9 MaterialS and Welding, 6 GUideline for COrrOSiOn PrOteCtiOn and COating SyStenis.
[6] ISO 12944, PaintS and VarniSheS一COrrOSiOn PrOteCtiOn Of Steel StrUCtUreS by PrOteCtiVe Paillt SyStems, 1998.
[7] ISO/DIS 12495, CathOdiC PrOteCtion for fixed Steel OffShOre structures, 2000.
[8] ISO/CD 19902, Draft, PetrOIeUm and NatUral GaS IndUStrieS一FiXed SteeI OffShore Structures, 2001,
[9] NACE Standard RP0176—2003, COrrOSiOn COntrOI Of Steel FiXed OffShOre StrUCtUreS Associated With PetrOleUm Production.
[10] NORSOK Standard M-501, SUrfaCe PreParatiOn and PrOteCtiVe Coating, Rev.4, 1999.
[11] NORSOK Standard M-5O3 , CathOdiC Protection, Rev.2, 1997.
[12] STG-RiChtlinie Nr. 2215, KOrrOSiOnSSChUtZ fur SChiffe Und Seebauwerke.
[13] ZTV-KOR9 ZUSatZliChe technische VPertragSbedingUngen Und RiChtiinie ftir den Korrosion-SSChUtZ VOn Stahlbauten.
[14] ZTV-Wt ZUSatZliChe technische VertragSbedingUngen Und RiChtlinie WaSSerbaU ftir Kor-rosionsschutz im Stahlwasserbau.
[15 ] ZTV-RHD-ST, ZUSatZliChe technische VertragSbedingUngen Und RiChtlinie reaktion-SharZgebUndene DUnnbeIege auf Stahl.
[16 ] KOrrOSiOnSSChUtZ in der maritimen TeChnik TagUngSband ZUr 1. Tagung, KOrrOSiOnSSChUtZ VOn OffShOre一WindenergieanIagen, NilS HUnOId Und Dr. Bernhard Richter.
[17] W. V, BaeCkmannn Und W. SChWenk (1999): U HandbUCh des kathodischen Korrosions-ChUtZeSW, 4. Auflage, Wiley一VCH VerIag.
[18] EgOn KUnZe (2001):UKOrrOSiOn Und Korrosionsschutzw, Band 4 KOrrOSiOn Und Korrosion-SSChUtZ in VerSChiedenen Gebieten, WiIey一VCH Verlag.
参考文献
以下是与海上风力发电机组设计相关标准:
[1] IEC 60034 (all PartS), ROtating electrical machines.
[2] IEC 60038, IEC Standard voltages.
[3] IEC 60146 (all PartS), SemiCOndUCtOr converters.
[4] IEC 60173:1964, COIOUrS Of the COreS Of flexible CableS and cords.
[5] IEC 60204T:2005, Safety Of machinery—-EleCtriCal equipment Of machines—Part 1: General requirements.
[6] IEC 60204-11:2000, Safety Of machinery―EIeCtriCal equipment Of machines—Part 11: Requirements for HV equipment for VOltageS above 1 OOO V a.c. Or 1 SoO V d.c. and not exceeding 36 kV.
[7] IEC 60227 (all PartS), POIyVinyl ChIOride insulated CabIeS Of rated VOItageS UP to and including 450/750 V.
[8] IEC 60245 (all PartS)» RUbber insulated CabIeS—Rated VOItageS UP to and including 450/ 750 V.
[9] IEC 60269 (all PartS) , LOW-VOItage fuses.
[10] IEC 60287 (all PartS), EleCtriC CableS一CalCUIatiOn Of the CUrrent rating.
[11] IEC 60364 (all PartS) > LOW VOltage electrical installations.
[12] IEC 60439 (all PartS), LOW VOltage SWitChgear and COntrOI gear assemblies.
[13] IEC 60446: 1999, BaSiC and Safety PrinCiPleS for man-machine interface, marking and identification.—IdentifiCatiOn Of COndUCtOrS by colours Or numerals.
[14] IEC 60529:1989 , DegreeS Of PrOteCtiOn PrOVided by enclosures (IP Code).
[15] IEC 60617, GraPhiCaI SyInbOIS for diagrams.
[16] IEC 60755 : 1983 > General requirements for residual CUrrent-OPerated ProteCtiVe devices.
[17] IEC 60898:1995 T EIeCtrICal accessories一CirCUit breakers for OVerCUrrellt PrOteCtiOn for household and SimiIar installations,
[18] IEC 61000-6-l:2005, EIeCtrOmagnetiC COmPatibility (EMC)—Part 6-1 :GeneriC StandardS—Immunity for residential, COmmerCial and Iight-industrial environments.
[19] IEC 61000-6-2:2005 J EleCtrOlnagnetiC COTnPatibility (EMC)—-Part 6-2: GeneriC StandardS—Immunity for industrial environments.
[20] IEC 61000-6-4:2006, EIeCtrOmagnetiC COmPatibiIity (EMC)—Part 6-4: GeneriC StandardS一E-mission Standard for industrial environments.
[21] IEC 61310-1:1995, Safety Of machinery一Indication, marking and actuation—Part 1: Requirements for ViSUal) auditOry and tactile signals.
[22] IEC 61310-2:1995 J Safety Of machinery—Indication, Inarking and actuation—Part 2: Requirements for marking.
[23] IEC 61400-13: 2001, Wind turbine generator SyStemS一Part 13: MeaSUrement Of mechanical loads.
[24] IEC 61400-21:2001, Wind turbine generator SyStemS—Part 21: MeaSUrenlent and assessment Of POWer quality CharaCteriStiCS Of grid COnneCted Wind turbines.
[25] IEC 61400-24:2002, Wind turbine generator SyStemS—Part 24: Lightning protection.
[26] ISO 3010:2001, BaSiS for design. Of StrUCtUreS—SeiSmiC actions On structures.
[27] ISO 4354:1997, Wind actions On structures.
[28] ISO 8930:1993, GeneraI PrinCiPieS On reliability for StrUCtUreS—LiSt Of equivalent terms.
[29] InternatiOnal CiVil AViatiOn OrganiZatiOn (ICAO) , AnneX 14 to COnVentiOn On International CiVil AViation, AerOdOmeSJ Vol. 1, Ed. 4, JUIy 2004, AerOdOme DeSign and OPerations.
[30] InternatiOnai ASSOCiatiOn Of Marine AidS to NaVigatiOn and LighthOUSe AUthOritieS (IA-LA), ReCOmrnendatiOn 0-117, Ed. 2, DeCember 2004, On the Marking Of OffShOre Wind Farms.
[31] GermaniSCher LIOyd WindEnergie GmbH, RUIeS and Guidelines: IV—IndUStrial Services, Part 2—GUideline for the CertifiCatiOn Of OffShOre Wind Turbines.
[32] DNV OffShore Standard, DNV-OS-JlOl, DeSign Of OffShOre Wind turbine structures.
[33] IEC 60721-3-3 :2002, CIaSSifiCatiOn Of environmental COnditiOnS—Part 3-3 :ClaSSifiCatiOn Of groups Of environmental ParameterS and their SeVeritieS一StatiOnary USe at WeatherPrOteCted locations.
中华人民共和国
国家标准
海上风力发电机组设计要求
GB/T 31517—2015/IEC 61400-3;2009
*
中国标准出版社出版发行 北京市朝阳区和平里西街甲2号(100029) 北京市西城区三里河北街16号(100045)
总编室:(010)68533533 发行中心:(010)51780238 读者服务部:(010)68523946
中国标准出版社秦皇岛印刷厂印刷 各地新华书店经销
*
开本880X 1230 1/16 印张6.25 字数172千字 2015年7月第一版2015年7月第一次印刷
*
书号:155066 • 1-51571 定价 81.00 元
如有印装差错由本社发行中心调换 版权专有侵权必究
GB/T 31517-2015
举报电话= (010)68510107
当表面粗糙度参数和用CharnOCk公式计算的湍流标准差用于远海条件时,应注意海岸地形和陆上粗糙度的 影响可能会使湍流标准偏差偏大。
式(26)中的标准差1.44×I15与GB/T 18451.1是一致的。但由于某些海上区域曾出现过较大的标准差,因此 对于特定场址,该参数应仔细评估,并考虑相似或邻近场址的可用信息。
25)例如:若冰冻期为5天,且平均温度分别为:一12. —19,2, — 3, — 4,则Knlu* = 38。