ICS 53.020.20
J 80
GB/T 10183.1 —2018/ISO 12488-1 :2012 代替 GB/T 10183. 1 2010
CraneS—TOIeranCeS for wheels and travel and traversing tracks— Part 1: General
(ISO 12488-1:2012,IDT)
2018-05-14 发布
2018-12-01 实施
—i—
刖 言
GB/T 10183≪起重机 车轮及大车和小车轨道公差》分为以下2个部分:
——第1部分:总则,
第4部分:臂架起重机。
本部分为GB/T 10183的第1部分。
本部分按照GB/T 1.1-2009给出的规则起草。
本部分代替GB/T 10183.1 2010«起重机 车轮及大车和小车轨道公差 第1部分:总则》,与 GB/T 10183.1-2010相比主要技术内容变化如下:
——对轨道公差b,、Ch的定义进行修改,明确了检测长度范围。
—车轮直径公差AD的定义进行修订。
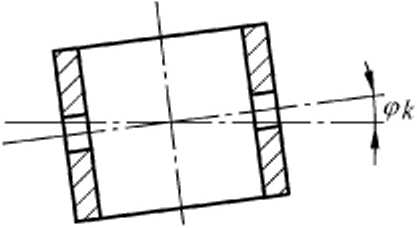
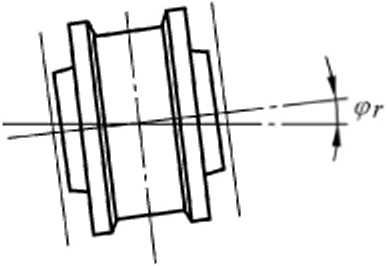
——轴孔和轮轴中心的倾斜度φk和尹,按照ISO 12488-1进行了规范。
终端止挡器或缓冲器的平行度公差FmaX按照ISo 12488-1进行了规范。
对表2〜表7中的图形、定义和公差进行了更正。
本部分使用翻译法等同采用ISO 12488-1:2012«起重机 车轮及大车和小车轨道公差 第1部分: 总则》(英文版)。
与本部分中规范性引用的国际文件有一致性对应关系的我国文件如下:
——GB/T 1182-2008产品几何技术规范(GPS)几何公差 形状、方向、位置和跳动公差标注 (ISO 1101:2004, IDT)J
—GB/T 1800.2 2009产品几何技术规范(GPS)极限与配合 第2部分:标准公差等级和 孔、轴极限偏差表(ISo 286-2: 1988,MOD);
——GB/T 6974.1—2008 起重机 术语 第1部分:通用术语(ISO 4306-1 :2007,1DT)O
为了便于使用,本部分还做r下列编辑性修改:
对ISO 12488-1:2012中部分公差符号做了编辑性的调整,同时,公差符号与对应示意图不一 致也做了订正;
——表2(续)中F的公差值由0.8S,1.0S等分别改为±0.8S,±1.0S等;
——表5(续)中F的公差值3级由士12.6改为士12.5。
本部分由中国机械工业联合会提出。
本部分由全国起重机械标准化技术委员会(SAC/TC 227)归口。
本部分负责起草单位:大连华锐重工集团股份有限公司、北京起重运输机械设计研究院。
本部分参加起草単位:中国合格评定国家认可中心、苏州市通安起重机械有限公司、法兰泰克重工 股份有限公司、上海工程技术大学、河南卫华重型机械股份有限公司、苏州腾冉电气设备股份有限公司、 斯泰尔起重设备(上海)有限公司。
本部分主要起草人:曾令、蔡亜森、潘锋、秦义校、金红萍、黄立新、吴军、张明军、李树渊。
GB/T 10183的本部分规定的要求以及给出的导则和设计准则,反映了目前起重机械的设计水平 的要求,给出了导则和设计准则。所规定的准则,体现了能保证达到基本安全要求并使部件具冇充裕的 使用寿命的成功设计经验。偏离这些准则一般会导致风险增大或寿命缩短。但也应承认,技术创新与 新材料的采用等有可能会产生新的方案,最终获得同等的或更高的安全性与耐久性。
1范围
GB/T 10183的本部分规定了 ISO 4306-1定义的起重机及其轨道的安装和运行状态下的公差。本 部分提出这些要求的目的是为了消除由于结构正常尺寸或形位偏差引起的过载,从而提髙起重机的运 行安全性和保证各部件达到其预期寿命。
本部分规定的公差均为极限值。本部分不适用于载荷效应引起的弹性变形。为达到预定的使用性 能要求,需要在设计阶段采用其他设计准则考虑这些弹性变形。
对于特定类型起重机的具体公差值,在GB/T 10183的其他各部分中规定。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 286-2产品儿何技术规范(GPS)极限与配合 第2部分:标准公差等级和孔、轴极限偏差 表[Geometrical PrOdUCt SPeCifiCationS (GPS) LimitS and fits——Part 2: TableS Of Standard tolerance ClaSSCS and Iimit CICViationS for holes and ShaftSJ
ISO IlOl产品儿何技术规范(GPS)儿何公差形状、方向、位置和跳动公差标注[Geometrical PrOdUCt SPeCifiCatiOnS (GPS)—GeometriCal tolerancing—TOIeranCeS Of form, OrientatiOn,IOCatiOn and run-out]
ISO 4306-1 起重机 术语 第 1 部分:通用术语(CranCS-VoCabUIary Part IjGcncrai)
3术语和定义
下列术语和定义适用于本文件。
3.1
构造公差 COnStrUCtiOlI IOIeranCe
起重机投入运行之前,在新装、改装、重装或维修组装起重机期间,由起重机整机及其轨道的装配产 生的偏离规定尺寸的允许量值。
注1:此种情况适用于新装的或经过维修的、改装的起重机及H轨道。
注2:该虽值既可以用极限尺寸偏差的绝対值也可以用几何允许偏差表示。
3.2
运彳亍公差 OPerationaI tolerance
起重机及其轨道在使用后,产生的偏离规定尺寸的允许量值。
注:该虽值既可以用极限尺寸偏差的绝对值也可以用允许的几何偏差表示。
4符号
下列符号适用于本文件。
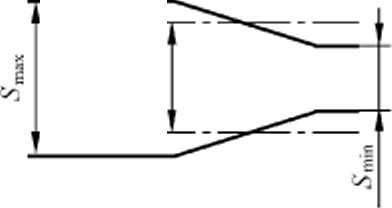
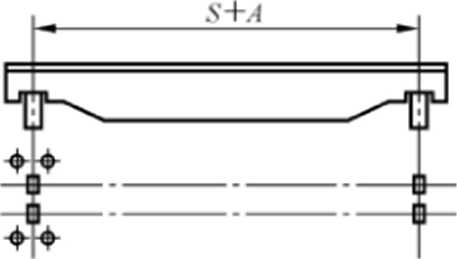
A —与大车或小车运行轨道任一点处的轨道中心有关的或与大车或小车车轮中心有关的跨 度公差。
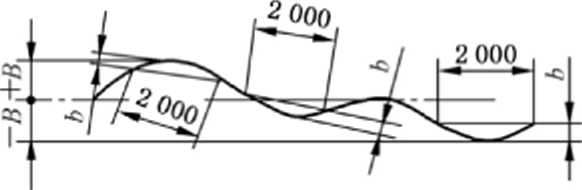
B —大车轨道全长上任一点处,在水平投影面内的直线度公差。
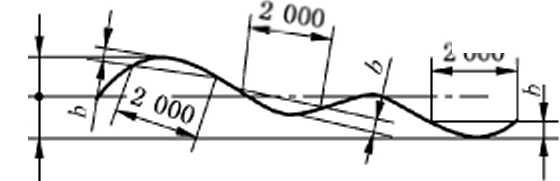
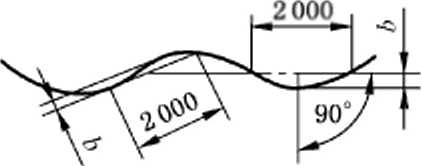
b ——轨道顶部任一点处,在2 m检测长度内水平投影面的直线度公差(抽样值)。
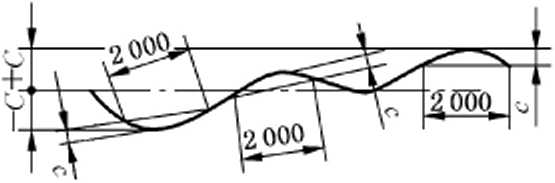
C ——大车轨道全长上任一点处.轨道中心顶部的直线度公差。
C —大车轨道顶部任一处,在2 m检测长度内的直线度公差(抽样值)。
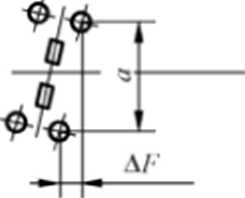
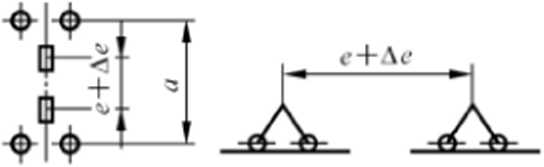
α ——沿轨道纵向的水平导向轮之间的中心距(轮距)。
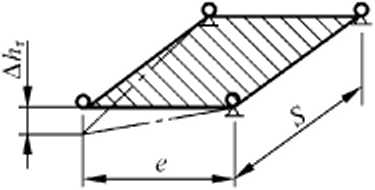
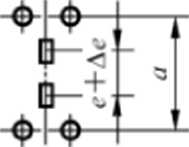
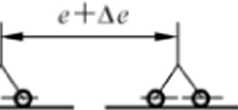
e ——沿轨道纵向的两个车轮轴线之间或台车之间的中心距(基距)。
hF —轨道顶而至水平导向轮底面的距离。
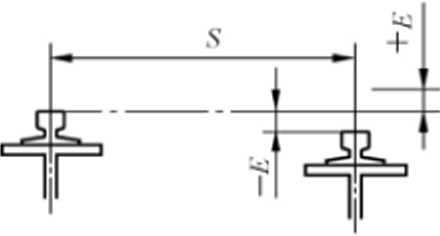
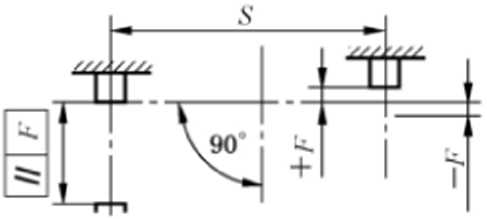
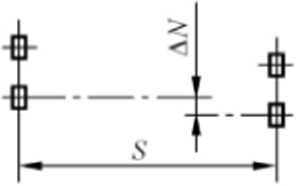
S ——两轨道中心之间的距离(大车为跨度,小车为轨距)。
%0 —用垂直距离与水平距离之比的1/1 OOO表示的倾斜度。
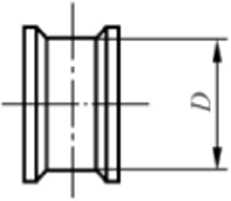
D —车轮直径。
Dt ——车轮直径公差。
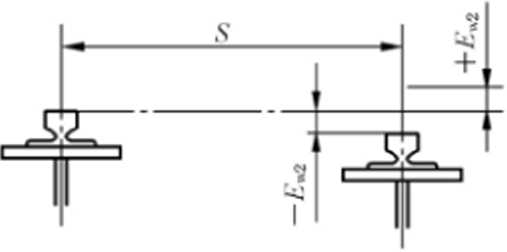
E ——轨道上任一点处,在与之成直角的方向上,相对应的两轨道测点间的高度差。
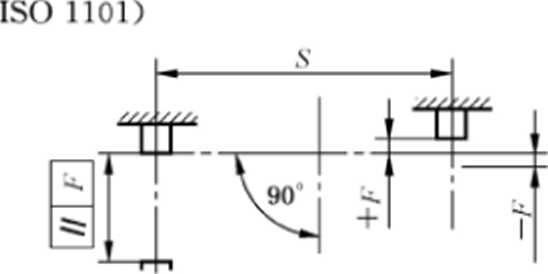
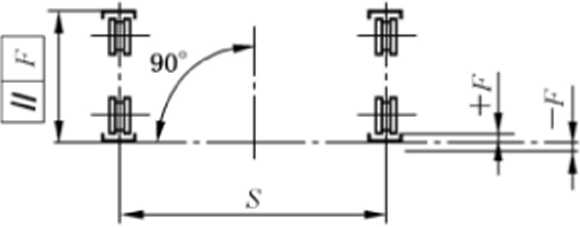
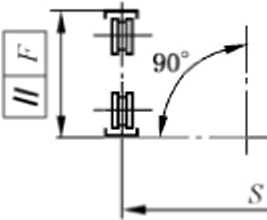
F ——终端止挡器或缓冲器的平行度公差。
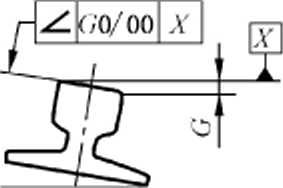
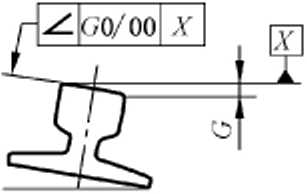
G 轨道横截面相对于水平面的倾斜度。
HF —轨道焊接接头的垂直错位值。
HS——轨道接头的水平错位值。
HX——对HS的修整区进行磨削后的平整度。
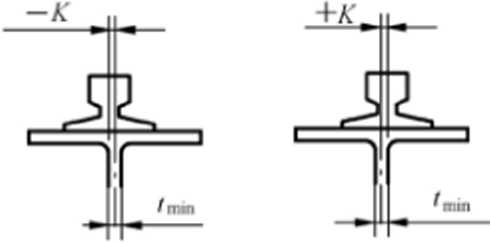
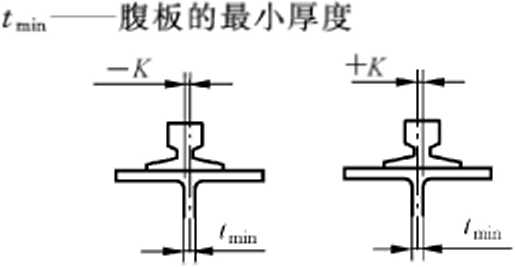
K ——轨道中心相对于腹板中心线的偏差。
∆D 耦合和独立駆动的起重机/小车车轮的直径公差。
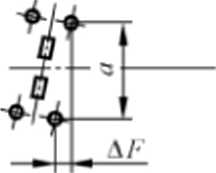
△e —水平投影面内车轮基距公差。
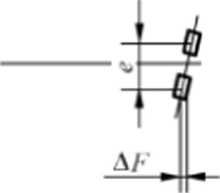
∆F——水平投影面内导向轮的水平偏斜。
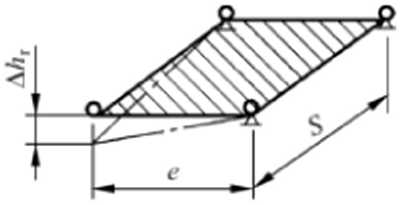
△人F —水平导向轮底而至轨道上平面的高度差。
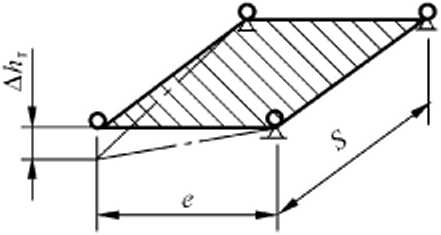
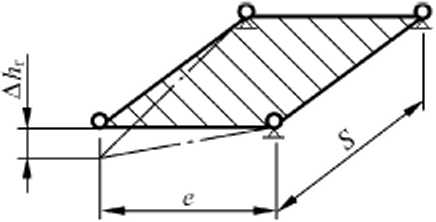
△/Ir——车轮接触点髙度公差(车轮接触点的平面度)。
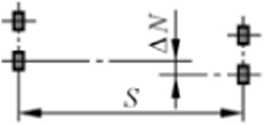
△N —水平投影面内车轮的同位差。
aF 水平导向轮轴在垂直于轨道方向上的平行度公差(在轨道横横面方向水平轮轴线的倾
斜度)。
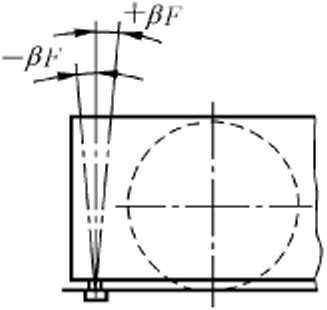
BF——水平导向轮轴在沿轨道方向上的平行度公差(在轨道纵向截面方向水平轮轴线的倾斜 度)。
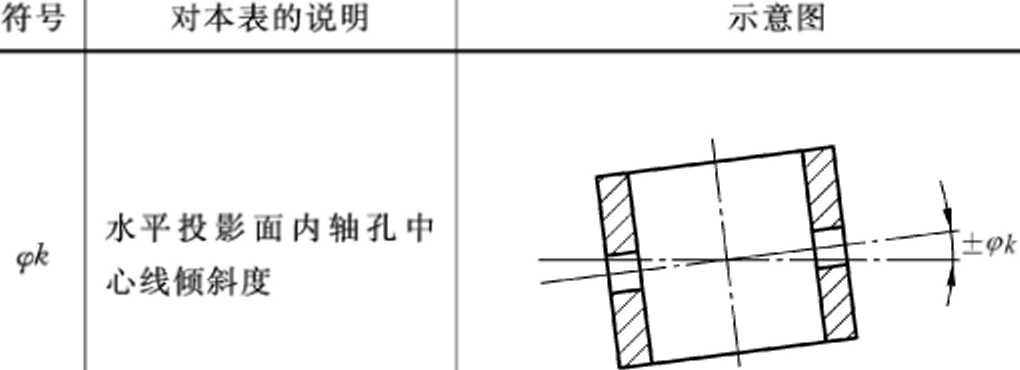
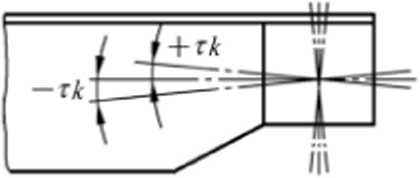
φk 水平投影面内轴孔中心线倾斜度。
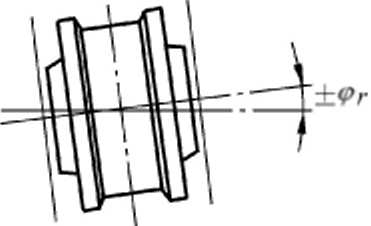
φr —水平投影面内轮轴中心线倾斜度。
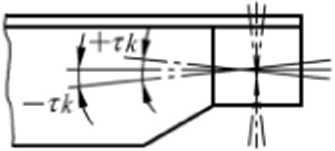
以 一垂直平面内轴孔平行度公差(轴孔垂直倾斜度)。
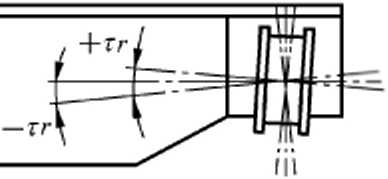
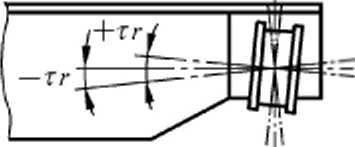
rr ——垂直平面内轮轴平行度公差(车轮垂直倾斜度)。
如 ——在靠近焊接轨道接头1m的检测长度内的直线度公差。
Ch 在靠近焊接轨道接头2 m的检测长度内的直线度公差。
以上符号及其含义适用于GB/T 10183的所有部分。
如果构造公差的符号同时也适用于运行公差(例如,用于使用说明书中),则应添加下标w(例如
Aw,Bw,Cw,Ew)o
必要时,还可以添加辅助下标,如:
As表示大车轨道跨度的运行公差,
Aw2表示小车轨道轨距的运行公差;
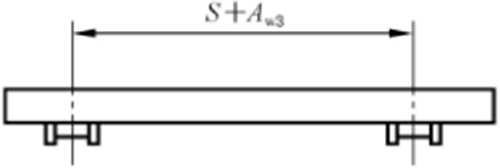
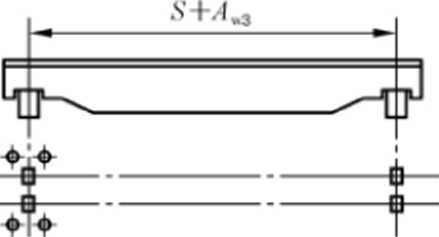
Aw3表示起重机跨度的运行公差;
表示小车轨距的运行公差。
5公差分级
确定公差等级的主要依据是起重机在整个寿命期内的总运行距离,但系统的敏感度以及在 GB/T 10183的其他各部分中规定的公差等级也应予以考虑。
注:就GB/T 10183本部分而言,系统敏感度是指系统对由意外偏高产生的公差所导致的载荷效应的反应程度(参 见ISO 8686-1:1989中的6.1.5).对于高敏感度系统,可能需要选用比表1中所列的更高一级的公差等级。
表1公差等级
|
公差等级 |
大车与小车运行距离极限值 km |
|
1 |
50 000≤L |
|
2 |
10 000≤L<50 000 |
|
3 |
L<10 OOO,用于永久性敷设的轨道 |
|
4 |
用于为建筑和安装目的敷设的临时轨道 |
|
注:L是相应的大车/小车运行机构的正常运行速度和规定工作时间的乘积,其中工作时间可取用户规定的数值 | |
|
或者参考该机构的分级而确定(参见IS。4301-l)β | |
6公差值
6.1总则
不同等级的公差值和参数应按表2、表3、表4、表5、表6和表7的规定。
6.2热效应
表2、表3、表4、表5、表6和表7中所列的公差值适用的工作环境温度为20 C。当起重机运行场 所的平均环境温度不符合此条件时,公差值应做相应调整。
6.3车轮接触点高度公差的应用
表4和表5规定的起重机或小车车轮接触点高度公差(车轮接触点平面度)以及表2和表3规 定的相应的轨道公差适用于在大车或小车钢轨上运行的刚性结构,即适用于主梁、小车架或门架的箱形 梁结构。对于由开式断面构成的框架结构,所用公差可以低一级或两级。
6.4构造公差
6.4.1总则
进行检测时,起重机应处于空载状态;起重机及其轨道的支承方式应与运行时相同。表2〜表6给 出了相应的公差值。
如果技术文件要求采用区分各类公差的方法,应参照本部分的相应表格,在与本部分中相关表格对 应的公差符号后加下角标。
例如:A?表示按表2规定的大车轨道构造公差。
注:公差超过表7中数值会使运行性能下降到不可接受的程度,并引起附加应丿j,导致钢轨、车轮、导向轮等磨损増 大,还可能损坏支承结构。如检测发现超过表7中的公差值,应由胜任的工程帅进行研究分析并采取相应 措施。
公差参数
公差值
大车轨道上任一点处,
A 起重机轨道中心之间
跨度S的公差
S≤16 m 时,±3;
S>16 m 时, ±[3 + 0∙25(S-16)' 极限值为±10 S单位为m
S≤16 m 时,±5: S≤16 m 时,士8:
S>16 m 时, S>16 m 时, ±[5 + 0.25(S-16)]; ±[8 + 0.25(S-16)];
极限值为±15 S单位为m
极限值为±20 S单位为m
S≤16 m 时,±12∙5;
S>16 m 时, ±[12.5+0.25 (S-16)] 极限值为土 25
S单位为m
mm
大车轨道全长上任一 点处,起爪机轨道顶部 水平直线度公差
轨道顶部任一点处
2 OOO mm (抽样值)检 测长度内的水平直线 度公差
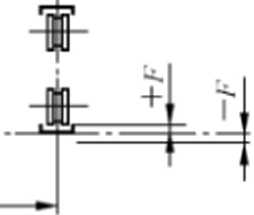
起重机轨道在水平投影面内的位置
2 (XX)
P+E
±5
大车轨道全长上任一 点处,起重机轨道中心 顶部的直线度公差
起重机轨道顶部任一 点处2 000 mm(抽样 值)检测长度内的直线 度公差
起兩机轨道顶部(沿轴心线方向)
起重机大车轨道顶部高低差(侧向倾斜)
±5
±10
±20 ±40 mm
8 mm
大车轨道上任一点处, 在与之成直角的方向 上,相对应的两轨道测
点之间的高度差
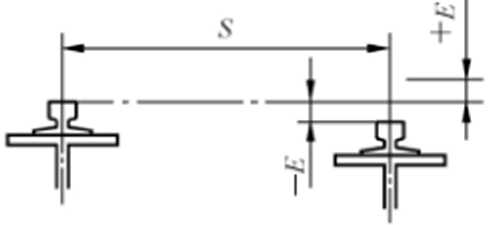
±0∙5S, S単位为m; 极限值为士5
±l∙0S, S单位为m; 极限值为士 10
±2S, S单位为m; 极限值为士 20
±4S, S单位为m; 极限值为士 40
mm
公差参数
公差值
G (见 表3)
∆Ar
大车轨道上垂直于纵 向轴线的终端止挡器 或缓冲器的平行度公 差,符号为〃
大车轨道上任一点处,
钢轨横截面的倾斜度, 符号为/
大车轨道上任一点处, 车轮接触点高度差(平 面度)
大车轨道上任一点处,
K 轨道中心相对于腹板
中心的偏差
在水平投影面内的位置(符号按
ZOUn 腹板的最小厚度
±0.8St 极限值为±8
S单位为m
±1.0Sf
极限值为土 10 S单位为m
±1.25Sl
极限值为±12.5
S单位为m
±l∙6Sj 极限值为土 16 S单位为m
mm
0.5S(或 0.5e), 极限值为5 e与S单位为Tnt 选两者中较小者 代入e或S
l∙0S(或 LOe), 极限值为io e与S单位为m, 选两者中较小者 代入e或S
L6S(或 l∙6e), 极限值为16 e与S单位为m, 选两者中较小者 代入e或S
2.0S(或 2∙0e>, 极限值为20 e与S单位为m, 选两者中较小者 代入e或S
mm
±0.5ZnIift
mm
公差参数
公差值
小车轨道上任一点处, 小车轨道中心之间的 轨距S的公差

±3
±5
±8
±12.5
mm
∆λr
适用于所有S≤16 Tn的轨距
轨道顶部任一点处
2 OOO mm (抽样值)检 测长度上的水平直线 度公差
小车轨道上任一点处, 在与之成直角的方向 上,相对应的两钢轨测 点之间的高度差
小车轨道上任一点处, 车轮接触点髙度差(平 面度)
小车钢轨在水平投影面内的位置(基准符 号按 ISo IIoI)
小车轨道高低差(侧向倾斜)
mm
S≤2 m 时,±3.2j
S>2 m 时,±1∙6S S单位为m 极限值为±6.3
S≤2 m 时,±4.2:
S>2 m 时,±2S S单位为m 极限值为士8
S≤2 m 时,±5$
S>2 m 时,± 2∙5S S单位为m 极限值为±10
S≤2 m 时,±63
S>2 m 时,±3∙2S
S单位为m 极限值为±12.5
S≤2 m 时,1.6;
S>2 m 时,0∙8S
S单位为m 极限值为3.2
S≤2 m 时,2;
S>2 m 时,1.0S
S单位为m
极限值为4
S≤2 m 时,2.5 i
S>2 m 时,1.25S S单位为m 极限值为5
S≤2 m 时,3.2;
S>2 m 时,1.6S S单位为m 极限值为6.3
GB'T≡183∙1I20∞MSO 12488—L
公差参数
符号∏ 对本表的说明 I 赢图
公差值
1级 2级 3级
4级 单位
小车轨道上垂直于纵 向轴线的终端止挡器 或缓冲器的平行度公 差,符号为〃
在水平投影面内的位置
±0.8SJ
极限值为±8
S单位为m
±1.0SJ 极限值为±10 S单位为m
±1.25S;
极限值为±12.5
S单位为m
±1∙6S;
极限值为±16
S单位为m
mm
(见注)
小车轨道上任一点处, 轨道横截面的倾斜度, 符号为/



小车轨道上任一点处, 轨道中心相对于腹板 中心的偏差,符号为〃
mm
注:参数G仅适用于特定的平顶小车轨道,对顶部呈弧状凸出的小车轨道则不必考虑G的公差。
公差参数
起重机无轮缘车轮中
A 心之冋跨度S的公差;
一侧车轮带导向轮
起重机车轮基距e或8
△e 轮起重机台车基距e 的公差
△N
起重机车轮或8轮起 重机台车的同位差
导向轮或带轮缘车轮 水平偏斜
公差值
S≤10 m 时,土2;
S>10 m 时, ±[2 + 0.1(S-10)] S单位为m
S≤10 m 时 t ±2.5;
S>10 m 时,
S≤10 m 时,±3.2?
S>10 m 时,
±[2∙5 + 0∙l(S-IO)] ±[3∙2 + 0∙l(S-IO)]
S单位为m
S单位为m
S≤10 m 时,士4;
S>10 m 时, ±[4 + 0.1(S-10>] S单位为m
mm
S≤10 m 时,±3.2;
S>10 m 时, ±[3∙2 + 0∙l(S — 10)] S单位为m
S≤10 m 时,±4;
S>10 m 时, ±[4+0∙l(S-10)]
S单位为m
S≤10 m 时,±5;
S>10 m 时, ±[5 + 0.1(S-10)] S单位为m
S≤10 m 时,±6.3»
S>10 m 时, ±[6∙3 + 0∙l(S —10)] S单位为m
mm
e≤3 m 时,±3.2; e>3 m 时∙ ±1.0e ;
e氓位为m
分别駆动:±5, 一套成对驱动:
S≤20 m 时,±2;
S>20 m 时, ±[2÷0.2(S~20)] S单位为m
±0∙32a, a单位为Xnl ±0∙4e, e单位为m
e≤3 m 时,±4 ; g>3 m 时. 士 l∙25e ;
e单位为m
e≤3 m 时,±5; e>3 m 时∙±1.6e;
C単位为m
e≤3 m 时f ±6.3; e>3 m 时∙±2e$ e単位为m
mm
分别驱动:±6.3∣ 一套成对卵动: S≤20 m 时, + 2.5;
S>20 m 时, ±[2∙5 + 0∙2(S — 20)]
S单位为m
分别駆动:±8;
一套成对驱动:
S≤20 m 时,±3.2?
S>2Q m 时.
±[3.2+0.2(S-20)]
S单位为m
分別驱动:±10; 一套成对駆动:
S≤20 m 时,±4;
S>20 m 时, ±[4+0.2(S-20>] S单位为m
mm
±0.4α , a单位为mj ±0.5e, e单位为m
±0.5α ,
a单位为m; ±0∙63e,
e单位为Tn
±0.63α , a单位为m; ±0∙8e, e单位为m
mm
符号
对本表的说明
公差参数
公差值
示意图

车轮接触点髙度公差。 对于给定与轮压有关 的结构刚度,车轮接触 点高度差应限制在使 被动轮平均轮压(带载 小车位于跨中)的变化 不超过5%的范固内。 如果没有进行这一计 算.高度公差∆A,按本 表规定选用。起正机 各车轮接触点的髙度 差是车轮接触点到由 其他3个车轮接触点 构成的S,e平面的最 大垂直距离。
对于静定支承的起或 机,可采用∆Λ,=0.4S
耦合和独立駆动乍轮 直径公差.
α∕S无轮缘
e/S带轮缘
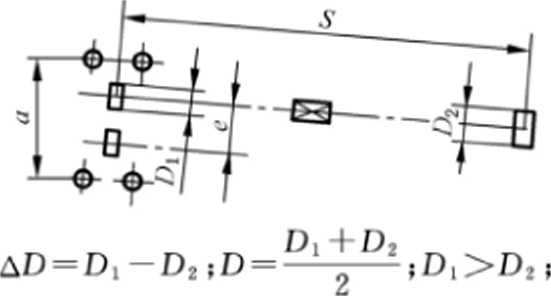
当车轮采用机械或电动耦合时,有必要检 査,丼最大允许的直径差是否要求增大e 和。的尺寸或者将公差降低。对于带两组 耦合駆动装置的起重机,△»应除以1.4
|
1级 |
2级 |
3级 |
4級 |
单位 |
|
S≤10 m 时9<2∣ S>10 m 时, ≤[2+0.1(S-10)] S单位为m |
S≤10 m 时,≤2.5∣ S>10 m 时, ≤[2.5 + 0.1(S-10)] S单位为m |
S≤10 m 时 t≤3.2∣ S>10 m 时, ≤[3.2 + 0.1(S-10)] S单位为m |
S≤10 m 时 S>10 m 时, ≤[4+0.1(S-10>] S单位为m |
mm |
|
Dl和Dj直径 公差按ISO 286-2 规定取h9; 1∙6∙D∕S, D单位为m; L6eD∕S, D单位为m |
Dl和Dz直径 公差按ISO 286-2 规定取h9; 2.0aD∕S9 D单位为Tnl 2.0eD∕St D单位为m |
Dl和DZ直径 公差按ISO 286-2 规定取h9; 2.5aD∕S D单位为m; 2∙5eD∕S, D单位为m |
Dl和Dt直径 公差按ISo 286-2 规定取h9; 3.2aD∕S 9 D单位为m: 3.2eD∕S, D单位为m |
mm |
公差参数
公差值
单位

水平投影面内车轮轴 心线傾斜度

垂直平面内轴孔倾斜 度;此公差针对空載起 重机(不带小车),在端 梁或靠近端梁处设有 无约束支承。近似选 择公差平均值时,应使 起垂机带载时(满载小 车位于跨中)其弹性变 形能使车轮轴处于水 平位置
±0.3
±0.4
±0.5
±0.63
±0.4
±0.5
±0.63
±0.8
+ 1.9
-0.4
+ 2.4 — 0.5
Tr
垂宜平面内轮轴倾斜 度;此公差针对空载起 重机(不带小车),在端 梁或靠近端梁处设有 无约束支承。近似选 择公本平均值时,应使 起重机带裁时(满我小 车位于跨中)其弹性变 形能使车轮轴处于水 平位置
终端止挡器或起重机 缓冲器垂直于纵向轴 线的平行度公差;符号 为〃
公差参数
公差值
±0∙8S, 极限值为土 8, S单位为m
÷2.0
— 0.5
+ 2.6
— 0.6
±1.0S9 极限值为土 10, S单位为m
±1∙25S,
极限值为±12.5,
S单位为m
±1∙6S, 极限值为土 16, S单位为m
mm

水平导向轮在垂宜于 大车轨道方向上的轴 向平行度公差
水平导向轮在沿大车 轨道方向上的轴向平 行度公差
如的髙度公差
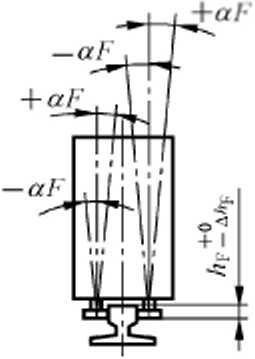
±0.5
±0.3
+ 0
-1
±0.63
±0.8
±1
±0.4
±0.5
±0.63
+0
—2.5
mm
小车带轮缘车轮中心 之间轨距S的公差
小车无轮缘车轮中心 之间轨距S的公差,一 侧乍轮带导向轮
小车车轮基距e或8
△e 轮小车平衡台车基距e 的公差
△N
小车车轮或8轮小车 平衡台车的同位差
公差参数
公差值
X+∕f
TCT
S≤2 m 时,± 1 $
S>2 m 时, ±[l+0∙l(S-2)]
S单位为m
S≤2 m 时,±2;
S>2 m 时, ±[2÷0.1(S-2)]
S单位为m
S≤2 m 时,±2.51
S>2 m 时, ±[2∙5 + 0∙l(S — 2)]
S单位为m
S≤2 m 时,±3∙2;
S>2 m 时, ±[3∙2 + 0∙l(S — 2)]
S单位为m
mm
S≤2 m 时,±1廟
S>2 m 时, ±[1.6 + 0.1(S-2)]
S单位为m
S≤2 m 时,±3.2;
S>2 m 时, ±[3.2÷0.1(S-2>]
S单位为m
S≤2 m 时,±4;
S>2 m 时, ±[4 + 0.1(S-2)]
S単位为m
S≤2 m 时,±5$
S>2 m 时, ±[5 + 0∙l(S-2)]
S单位为m
e≤3 m 时,±3.2; g>3 m 时,±l∙0e;
e单位为Tn
e≤3 m 时,土4 ; e>3 m 时,土l∙25e;
e单位为Tn
e≤3 m 时,土5; e>3 m 时,± l∙6e J e单位为Tn
e≤3 m 时,±6∙3;
e>3 m 时,±2e; mm e单位为m
分别駆动时,土 5; 成对驱动时,士 2
分别驱动时,±6.3; 成对驱动时,士 2.5
分别驱动时,土 8; 成对驱动时,士 3.2
分别驱动时,土 10;
成对驱动时,士 4
mm
∆F
导向轮或车轮轮縁水 平偏斜
∆D
单独或联合驱动的小 车车轮直径公差
公差参数

±0.32α, U单位为m; ±0.4e, e单位为m
±0.4〃, a单位为m;
±0.5«,
e单位为m
公差值
±0.5。, a单位为m; ±0.63e .
e单位为m
±0.63α , a单位为m;
±0∙8e,
C单位为m
mm
h9
直径公差按
ISo 286-2的规定
h9
直径公差按
ISO 286-2的规定
h9 h9
直径公差按 直径公差按 mm
ISO 286-2的規定 ISo 286-2的规定
∆Ar车轮接触点髙度差
S≤2 m 时, <1.6;
S>2 m 时,
≤[1.6+0.1(S-2)]
S单位为m
S≤2 m 时, ≤2,
S>2 m 时,
≤[2+0.1(S-2)]
S単位为m
S≤2 m 时, ≤2.5,
S>2 m 时,
≤[2.5÷0.1(S-2)]
S单位为m
S≤2 m 时, ≤3.2;
S>2 m 时, ≤[3.2 + 0.1(S-2)] S单位为m
mm
小车架水平投影面内 轴孔倾斜度
±0.3 ±0.4
±0.5 ±0.63 %。
Cn
公差参数
公差值
小车架水平投影面内 轮轴倾斜度
小车架垂直平面内轴 孔倾斜度
小车轮垂宜平面内轮 轴倾斜度
终端止挡器或起正机
缓冲器垂直于纵向轴
线的平行度公差;代号
为〃
注:导向轮的公差值见表4。
±0.4 ±0.5
±0.63 ±0.8 %。
+ 1.9
— 0.4
+ 2.4
-0.5
+ 2.0
— 0.5
+ 2.6
— 0.6
±Q.8Sf 极限值为士8
S单位为m
±1.0Si
极限值为士10
S单位为m
±1.25S;
极限值为士12.5
S单位为m
±1.6SJ
极限值为±16
S单位为m
mm
GB'T≡183∙1I20∞MSO 12488—L
|
公差参数 |
参数值 | |||||||||
|
符号 |
说明 |
图示 |
所冇等级 |
单位 | ||||||
|
HF |
轨道翼缘处焊接接头的垂直错位值 |
HF应磨平 |
0(制造厂生产焊) <1(现场焊) |
mm | ||||||
|
I |
— |
J | ||||||||
|
HS |
轨道头部的水平错位值 |
水平投影面内的位置 亠 |
≤1 以1 : 50的斜度将错位处磨平 | |||||||
|
I —( > |
9 | |||||||||
|
f—-- |
Γ 3 | |||||||||
|
6. |
轨道接头在水平投影面内的倾斜度如和顶部(倾斜 度)ch,6.检测长度为1 m和Ch检测长度为2 m |
接头焊缝M 应冇缺曰 |
近的不平处应在钢轨头部磨 |
平修整,不 |
2 | |||||
|
\------V |
ɪ |
—~3 M | ||||||||
|
Ch |
2 | |||||||||
|
L |
2 Ii | |||||||||
|
—I I _ J___ 1 | ||||||||||
|
L__■ ___——— | ||||||||||
|
I | ||||||||||
|
HX |
对HS的修整区进行磨削后的平整度,钢轨接头借 开布置时,靠近钢轨固定处的接头可不必打磨 |
≤0.5 | ||||||||
|
注:可拆卸钢轨接头应符合本表的要求。 | ||||||||||
17
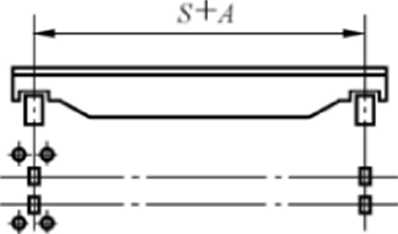
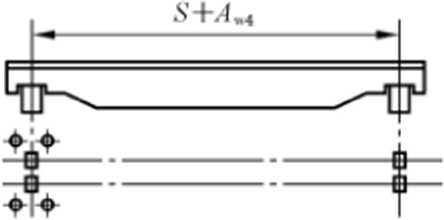
AWI
大车轨道上任一点处, 起重机钢轨中心之间 的跨度公差
大车轨道上任一点处, BWI起重机钢轨头部水平 直线度公差
大车轨道上任一点处, 在与之成直角的方向 上,相对应的两轨道测 点之间的高度差
小车轨道上任一点处,
Aw2 轨道中心之间的轨距 公差
公差参数
公差值
+A =SnM-S —Λ =S min — S
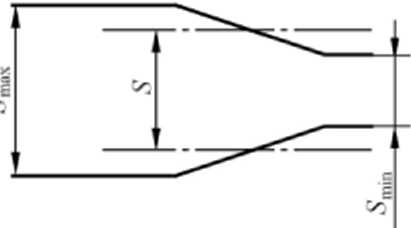
S≤16 m 时,±10;
S>16 m 时, ±[10 + 0.25(S-16)]
S单位为m
S≤16 m 时,±16;
S>16 m 时, ±[16 + 0.25(S-16)]
S≤16 m 时,±25;
S>16 m 时, ±[25+0.25(S-16)]
S≤16 m 时,±40;
S>16 m 时, ±[40 + 0∙25(S-16)]
mm
S单位为m
S单位为m
S单位为m
起巾:机钢轨在水平投影面内的位置
大车轨道高低差
|
一 S | |||
|
J |
ZZ | ||
|
Γ 串 |
I |

±10
±20
±40
±80
mm
±10 ±20
±6;
适用于所冇
S≤16 m的轨距
±10; 适用于所冇 S≤16 m的轨距
±40
±80
mm
±16;
适用于所冇
S≤16 m的轨距
±25;
适用于所冇
S≤16 m的轨距
mm
OO
公差参数
公差值
小车轨道上任一点处, 在与之成直角的方向 ∣∙∙,相对应的两轨道测
点之间的髙度差
小车轨道高低差
±12.5
±16
±20 ±25 mm
起重机带轮缘车轮中
心之间跨度S的公差
S≤10 m 时. ±5:
S>10 m 时, ±[5+0.2(S-IO)I S单位为m
S≤10 m 时t±8j
S>10 m 时,
±[8+0.2(S-10)]
S单位为m
S≤10 m 时,± 12.5∣ S>10 m 时, ±[12.5+0.2(S-IO)J S单位为m
S≤10 m 时,±20$
S>10 m 时, ±[20+0.2(S-10)]
S单位为m
mm
一侧车轮带导向轮时, 起重机无轮缘的车轮 中心之间跨度S的 公差
S≤10 m 时,±125
S>10 m 肘,
± [12.5+0.2(S-IO)J
S单位为m
S≤10 m 时,±14:
S>10 m 时, 土 [14+0∙2(S-10)] S单位为m
S≤10 m 时,±16$
S>10 m 时, ±[16+0∙2(S-IO)I S单位为m
S≤10 m 时,±20$
S>10 m 时, ±[20+0∙2(S-Io)I S单位为m
mm
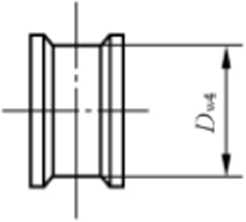
起亜机单独驱动车轮 直径公差
DtcW3
起正机成对驱动车轮 直径公差
hl8
公差按ISo 286-2
ITl 2 1T13 r∏4 IT14
公差按ISO 286-2
mm
mm
DE
公差参数
公差值
小车带轮缘车轮中心 之间轨距S的公差
一侧车轮带导向轮时, 小车无轮缘的车轮中 心之间轨距S的公差
小车单独駆动车轮直 径公差
小车成对駆动车轮直 径公差
IFPr
S≤2 m 时,±3$
S>2 m 时, ±[3 + 0∙2(S-2)]
S单位为Tn
S≤2 m 时,±63
S>2 m 时, ±[6+0∙2(S-2)]
S単位为m
S≤2 m 时,±8;
S>2 m 时, ±[8+0.2(S-2)]
S单位为m
S≤2 m 时,±12;
S>2 m 时, ±[12+0.2(S-2)]
S单位为m
mm
S≤2 m 时,±5$
S>2 m 时, 土 [5 + 0.2(S-2)]
S单位为m
S≤2 m 时,±10:
S>2 m 时, ±[10 + 0∙2(S-2)]
S单位为m
S≤2 m 时,±12;
S>2 m 时, ±[12 + 0∙2(S-2)]
S单位为m
S≤2 m 时>±16;
S>2 m 时, ±[16 + 0∙2(S-2>]
S单位为m
IT12
hl 8
公差按ISO 286-2
1T13
1T14
ITU
mm
mm
公差按ISO 286-2
GB/T 10183.1—2018/ISO 12488-1 s2012
参考文献
[1] ISO 4301-1起重机和起重机械分级第1部分:总则
[2] ISO 8686-ls1989起重机 载荷与载荷组合的设计原则 第1部分:总则
中华人民共和国
GB/T 10183.1 2018/1SO 12488-1 :2012
*
中国标准出版社出版发行 北京北京阳区和平里西街甲2号(100029) 北京市.西城区三里河北街16号(100045)
网址:www.spc.net.cn
总编室:(010)68533533 发行中心:(010)51780238 读者服务部:(010)68523946
中国标准出版社秦皇岛印刷厂印刷 各地新华书店经销
开本880X1230 1/16 印张1.75 字数44千字 2018年5月第一版 2018年5月第一次印刷

*
书号:155066 • 1-60003 定价 27.00 元