
ICS 91. 140.90 J 80
GB 26557—2011
代替 GB/T 10054—2005,GB 10055—2007
BUilderS hoists for PerSOnS and materials With VertiCany guided CageS
2011-06-16 发布
2012-05-01 实施
III
5. 1
5.2
5. 3
5.4
5. 5
5.6
5.7
5.8
5. 9
5. IO
5.11
5.12
总则............................... 载荷组合及计算................ 底架................................. 导轨架、附墙架和缓冲器 …… 升降通道防护装置和层站入口 吊笼................................. 传动系统........................... 液压系统....................…… 电气安装与电气设备............
控制和限位装置............... 故障.............................. 噪声..............................
14
14
15
19
22
28
29
30
32
33
附录A (规范性附录)电气安全装置
45
参考文献
46

本标准第 1 章、第 2 章、第 3 章、第 4 章和 5.2. 1 〜5.2.6(5.2.2. 8 除外)、5.3.3、5.4. L4、5. 7. 3. 1.2. 1、
5.7. 3. 1.2. 2.5. 7. 3. 2. 1.2 的第二段第二句、5. 7. 3. 2.2 的第一个列项、5. 7. 3. 2.3 的三个列项、 5. 10. 7. 1. 1的第二句为推荐性的,其余为强制性的。
本标准是关于人货两用施工升降机的C类安全标准。
本标准按照GB/T 1. 1—2009给岀的规则起草。
本标准代替GB/T 10054—2005«施工升降机》和GB 10055—2007«施工升降机安全规程》中有关人 货两用施工升降机的技术和安全要求。
本标准与EN 12159:2000 + Al:2009<吊笼有垂直导向的人货两用施工升降机》技术内容基本 一致。
本标准由中国机械工业联合会提出O
本标准由全国升降工作平台标准化技术委员会(SAC/TC 335)归口 o
本标准起草单位:北京建筑机械化研究院、廊坊凯博建设机械科技有限公司、上海宝达工程机械有 限公司、上海市建筑科学研究院(集团)有限公司、湖北江汉建筑工程机械有限公司、辽宁省安全科学研 究院、天津市祥和机械有限责任公司、深圳市华测检测技术股份有限公司、北京建研机械科技有限公司。
本标准主要起草人:田广范、王东红、何振础、陈爱华、吴光斌、赵鹏华、黄家亮、卢宏伟、郭冰、 尹文静。
1范围
本标准规定了吊笼有垂直导向的人货两用施工升降机制造和安装应遵守的技术和安全准则。
本标准适用于动力驱动的、临时安装的、由建设施工工地人员使用的带有吊笼并可在各层站停靠服 务的施工升降机(以下简称升降机)。其具有下列主要特征:
——可运载人员或人员和货物;
——有导向装置;
——吊笼垂直运行或沿着与垂直面夹角最大不超过15°的导轨运行;
——吊笼由卷筒驱动的钢丝绳、或由齿轮齿条、液压油缸(直接或间接)或伸缩连杆机构悬挂或 支承;
——导轨架架设时,需要或不需要其他独立结构物的支撑。
本标准不适用于:
——货用施工升降机;EN 12158-1:2000 和 EN 12158-2:2000;
---GB 7588—2003、GB 21240—2007 和 EN 81-3:2000 的电梯;
——由起重设备悬挂的工作吊笼;
——叉车货叉支承的升降平台;
---ISO 16368:2OO3 JSO 16369:2007 和 EN 1570:1999 的工作平台;
——缆索车;
——特别设计的军事用升降机;
——矿用升降机;
——舞台用升降机;
——特殊用途升降机。
注:本标准第4章对设备使用中可能出现的危险进行了识别,并列出了按制造商的规定来使用时,消除或减小这些 危险的措施。本标准未包括的危险,应遵守GB/T 15706—2007的要求。
本标准未包括对下列情况的补充要求:
——恶劣环境(如恶劣气候、强磁性场所);
——防雷击;
——特殊情况(如潜在的爆炸环境)下应遵守的特殊规则5
——电磁兼容性(发射、抗扰度);
——危险载荷(如熔化的金属、酸/碱性物品、有辐射的材料、易碎品)的处理;
——内燃机的使用;
——遥控装置的使用;
--加工制造过程中发生的危险J
——由于转场移动而产生的危险;
——在公共道路上架设时发生的危险;
地震O
=7
本标准涉及了升降机的安装。包括底架和地面防护围栏的安装,但不包括升降机用混凝土、碎石、木材等基础 的设计。包括附墙架的设计,但不包括连接到支撑结构物的锚固螺栓的设计。包括层门及其结构的设计,但不包括 任何连接到支撑结构物的锚固螺栓的设计。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 2893 安全色
GB 2894安全标志及其使用导则
GB/T 3480. 5直齿轮和斜齿轮承载能力计算 第5部分:材料的强度和质量
GB/T 3811—2008起重机设计规范
GB 4208外壳防护等级(IP代码)
GB 5226.1—2008机械电气安全 机械电气设备 第1部分:通用技术条件
GB 5226. 2机械安全机械电气设备第32部分:起重机械技术条件
GB/T 5972起重机 钢丝绳 保养、维护、安装、检验和报废
GB 7588--2003电梯制造与安装安全规范
GB/T 8196
GB 12265. 3
GB 14048. 4
GB 14048. 5
路电器
GB/T 14574
GB/T 15706.1机械安全 基本概念与设计通则 第1部分:基本术语和方法
GB/T 15706. 2—2007
GB 16754 机械安全
GB/T 16855. 1—2008
GB/T 17248. 2 声学
一个反射面上方近似自由场的工程法
GB/T 18831
GB/T 19670
GB/T 20118
GB 21240—2007液压电梯制造与安装安全规范
GB 23821-2009机械安全防止上下肢触及危险区的安全距离
ISO 6336-1直齿轮和斜齿轮承载能力计算 第1部分:基本原理、概述和通用影响系数(Calculation Of IOael CaPaCity Of SPUr and helical gears一Part 1 : BaSiC PriIICiPIeS, introduction and general influence factors)
ISO 6336-2 直齿轮和斜齿轮承载能力计算 第2部分:齿面接触疲劳强度(点蚀)计算 CCalCUIatiOn Of IOa(I CaPaCity Of SPUr and helical gears一Part 2: CaICUIatiOn Of SUrfaCe durabiIityCpit-tings)]
ISO 6336-3直齿轮和斜齿轮承载能力计算 第3部分:齿根弯曲强度计算(CalCUIatiOTI Of IOad CaPaCity Of SPUr and helical gears一Part 3: CalCUIatiOn Of tooth bending Strength)
ISO 9355-1显示器和控制致动器设计的人类工效学要求 第1部分:人与显示器和控制致动器 的相互作用(ErgonOmiC requirements for the design Of displays and COntrOl actuators—Part 1: HUnlan interactions With (IiSPIayS and COntrOl actuators)
ISO/TR 11688-1声学低噪声机器和设备设计的推荐实用规程第1部分:计划(ACOUStiCS-
机械安全防护装置固定式和活动式防护装置设计与制造一般要求
机械安全避免人体各部位挤压的最小间距
低压开关设备和控制设备 机电式接触器和电动机起动器
低压开关设备和控制设备 第5-1部分:控制电路电器和开关元件 机电式控制电
声学机器和设备噪声发射值的标示和验证
机械安全 基本概念与设计通则 第2部分:技术原则
急停设计原则
机械安全 控制系统有关安全部件 第1部分:设计通则
机器和设备发射的噪声工作位置和其他指定位置发射声压级的测量
1T;
机械安全带防护装置的联锁装置设计和选择原则
机械安全防止意外启动
一般用途钢丝绳
Ill
Ill
ReCOmmended PraCtiCe for the design Of IOW-NOiSe machinery and equipment一Part 1 : Planning)
EN 982机械安全 流体动力系统及其元件的安全要求 液压传动装置(Safety Of machinery一
Safety requirements for fluid POWer SyStemS an COmPOnentS一HydraUIiCS)
3定义和术语
GB/T 15706. 1界定的以及下列术语和定义适用于本文件。
3. 1
施工升降机 builders hoist
临时安装的、带有有导向的平台、吊笼或其他运载装置并可在建设施工工地各层站停靠服务的升降
机械.
3.2
额定载重量rated IOad
设计确定的工作状态下吊笼运载的最大载荷。
3.3
额定速度 rated SPeed
设计确定的吊笼速度。
3.4
钢丝绳式升降机 Wire rope hoist
采用钢丝绳作为载荷悬挂系统的升降机。
3.5
强制 式传动 POSitiVe drive
不通过摩擦力来传递动力的传动系统。
3.6
液压式升降机 hydraulic hoist
用液压油缸直接或间接承运载荷的升降机。
3.7
齿轮齿条式升降机 rack and PiniOn hoist
采用齿轮齿条作为载荷悬挂系统的升降机。
伸缩连杆机构 expanding Iinkage mechanism
在致动装置控制下通过伸展或收缩来支撑和引导吊笼的机械连杆系统(如剪叉式)。
3.9
底架
base frame
用来支承和安装升降机其他所有组成部分的升降机最下部的构架。
3. 10
导轨 g∏ides
确定吊笼或对重(有对重时)运行路线的刚性元件。
3. 11
导轨架mast
支撑和引导吊笼、对重(有对重时)的结构架。
3. 12
导轨架节(标准节)mast SeCtiOn
组成导轨架的不可再分割的结构件。通常称为标准节。
3. 13
附墙架mast tie
连接导轨架和建筑物或其他固定结构,为导轨架提供侧向支撑的构件。
3. 14
升降通道 hoistWay
吊笼及其载荷运行的全部空间。
3. 15
对重通道 COUnterWeight Way
对重运行的全部空间。
3. 16
吊笼Cage
有底板、围壁、门和顶的运载装置。
3. 17
对重(平衡重)COUnterWeight
用于平衡其他重量的重物。本标准中的“对重”,特指对吊笼起平衡作用的重物。
3. 18
制动距离 StOPPing distance
从控制装置动作或安全电路断开到吊笼完全停止运动,吊笼移动的距离。
3. 19
超速安全装置 OVerSPeed Safety device
使超速的吊笼或对重停止并保持停止状态的机械装置。
3.20
松绳 SIaCk rope
张紧的钢丝绳因外部载荷消除而处于的状态。
3.21
钢丝绳末端连接 Wire rope termination
钢丝绳末端连接或固定允许采用的方法和绳具。
3.22
层站 Ianding
建筑物或其他固定结构物上供人货岀入吊笼的地点.
3. 23
安全距离 Safety distance
升降机上任一运动件与任一通道(入口)之间允许的最小距离。
3.24
防护围栏(护栏)guard rail
除门之外,防止人员坠落或进入危险区域的固定设施。
3.25
正常作业 normal OPeratiOn
设备用于运送载荷时的通常作业工况,不包括维护、安装和拆卸等工况。
3.26
工作状态 in SerViCe
升降机处于使用状态,无论吊笼在何位置、有无载荷、移动或静止
3.27
非工作状态 OUt Of SerViCe
已安装就位的升降机,其吊笼无载荷且处于受风影响最小的位置(通常但非必须处于地面)。
3.2
专 业人员 CoinPetent PerSOn
受过适当培训和必要指导,具有充分知识和实践经验,能执行必要工作程序的指派人员。
4危险列表
下面的危险列表是根据GB/T 15706. 1和GB/T 15706. 2确定的。
为控制风险或减小危险,表1、表2和表3列岀了危险类别及相应的条款编号。
本标准不适用的危险或未做要求的不重要危险,其相应的条款编号以“不适用"表示。
表1升降机设计和制造的相关危险
序号
对应条款
1 机械危险
5. 5∙ 2,5∙ 5. 3、5. 5. 6.5. 7. 2.7.1, 2. 7、7, L M 8
L 2 剪切
5. 5、5. 6* 1.2.5. 7. 2、7.1. 2∙ 7.7. L 2. 8
L3 切割或切断
5. 5.5. 6∙ L 2、5. L 2.7.1. 2. 7.7. 1, 2* 8
1-4 缠绕
5.7*2
L 5 吸入或卷入
5.5.2.5, 5, 3、5・ 6. L 2.5. 7. 2.7, L 2. 7
1.7 刺伤或刺穿
L8 摩擦或磨损
5∙4*3∖5∙6∙2∖7∙L2∙7∖7∙L2.8
不适用
5∙5M∖5∙537∙L2
L9 高压液体喷射
5∙ 7. 3. 3、5. 8
1.10零部件飞出
5.6丄2
1.11稳定性丧失
L 12滑倒、绊倒和坠落
5. 2*5. 3%5∙ 4.4. 2、5. 6∙ 3.7∙ L 2, 7, 3
5* 5.5∙ 6. L5∙ 6. 2、5・ 7. 3∙ 3. 8^7. 1. 2# 7. 3
2 电气危险
2.1 触电
2.2 静电现象
2-3 热辐射
2.4 外部影响
5∙9"∙L2.7∙3
不适用
不适用
5.7. 4.11^5. 9.3
3 热危险
3.1 烧伤和烫伤
不适用
序号
噪声危险
4. 1
听力丧失
4,2
干扰通话
振动危险
辐射危险
6. 1
电弧
6.2
激光
6.3
6.4
离子辐射源
高频电磁场
7. 1
7,2
7.3
8. 1
&2
8,5
8.6
10
10.1
10.2
10.3
10.4
10.5
11
11.1
11.2
11.3
11.4
IL 5
IL 6
11.7
11.
11.9
ILlO
表1 (续)
对应条款

5.12^7.1.2.2
5.12.7. 1.2.2
不适用

不适用
不适用
不适用
未涉及
机器加工、使用、产生或排出的材料或物质引起的危险
接触或吸入有毒的液体、气体、雾、烟和粉尘
火灾或爆炸
生物和微生物
设计时忽视人类工效学引起的危险
不健康姿势或过度用力
不充分考虑手/手臂或脚/腿的解剖结构 忽视人员防护设备的使用
不充分的照明
心理负担过重或准备不足
人为差错
综合危险
动力中断、机器零部件损坏和功能混乱引起的危险
动力中断
机器零部件或液体意外飞出或飞溅
控制系统失效或故障
装配错误
机器倾翻、意外丧失稳定性
有关安全措施/手段缺失和/或不正确引起的危险
防护装置
与安全相关(防护)装置 启动和停机装置
安全标志和符号
信息和警示装置
动力切断装置
急停装置
工件的拆装
用于安全调整和/或维护的基本设备和附件 排气装置~

` ɪ -、工 rτrj 不适用
不适用
不适用

5∙ 1∖5∙6∙L3∙2∖7.1∙2∙ 7.3
5∙5∖5∙7∙2∖7∙L2.7
不适用
5∙9∙8J*L2. 7.3
5.10
5. 6. 3.5.10.7. 1. 2.7,7.1. 2∙ 8、7. 2x7, 3
未涉及

5.1. 4.K5. 9. 2.5.11.7,1. 2, 4.1.7. L 2. 5
5. 7. 2∙ 3、5* 7. 3. 3、5. 8
5∙10∙2∙2∖5∙10∙3∖5.10∙6
5∙4.L7.L2∙7
5∙2∖5∙30∙4∖7∙L2∙7

5∙5,5∙6∙ L2,7∙ L2.7J*L2.10
5. 5. L5. 6.1.2.7, L 2. 7.7.1. 2. 10
5.10.5、5.10.7、7.L2・7、7・L2.8
7.2
5. 6* 32
5.10.6
5. 6∙ 2、5.11^7. L 2,5.7.1. 2.7λ7. L 2.10
不适用
7.L2∙5∖7∙L2∙7∖7∙L2∙ 10
不适用
表2升降机转场移动和/或提升载荷的特殊危险
序号 危 险
对应条款
转场移动引起的危险
12 移动/工作区域不充分照明引起的危险
未涉及,见第1章
13 作业中突然移动引起的不稳定性等所引发的危险
未涉及,见第1章
14
操作位置设计不当或不符合人类工效学引起的危险
未涉及,见第1章
15
16
机械危险
操作载荷升降引起的危险
未涉及,见第1章
16.1稳定性丧失
5. 2. 5、5. 3、5. 4.1.5. 4.2.7. L 2. 7
16.2
吊笼出轨
5. 4.1.5. 6.1.5.10. 7.2.2
16. 3
机器和提升附件机械强度的丧失
5. 2、5. 3、5. 5. 4、5. 6.5.7.7. L 2.10
16.4失控运动引起的危险
5. 5,3.5. 6∙2J*L2∙8
17
观察运动件运动情况的视野不充分引起的危险
5. 5、5. 6.1. 2. 8

19
雷击引起的危险
装载/超载引起的危险
未涉及,见第1章
5∙2∖5∙6"∙L2∙8
表3升降机载人的特殊危险
序号
升降机载人的危险
对应条款
20
吊笼超载或过度拥挤
5. 6、5. 7. L 2.
21
外部控制或机器其他运动引起的吊笼意外动作
5.7.5. 10φ 7. L 2、5.10. 7. 2. 3.5. IL 4
22
23
超速
人员从吊笼中坠落
5. 4∙ 3v5- 6. 2、5・ 7
5. 6.1
24 吊笼坠落或倾翻
25 吊笼急剧加速或减速
5∙4*1.5∙6∙2∖5∙7∖5∙ 10. 7.2.2
5∙ 4.3v5. 6.2.5.7. 4.5,7.1.2.10
26
标志不明确引起的危险
7.3
5安全要求和/或措施
5. 1总则
升降机的设计应考虑安全使用、安装、拆卸和维护/检查0其安装应利用安全通道,如通过吊笼顶或 类似设施。
安装过程中涉及到的所有零部件,如导轨架节,在设计时应考虑其相应于人力操作的重量。当超过 许用人力操作重量时,制造商应在使用说明书中推荐相关适用的起重设备。所有可移开的和可拆卸的 罩盖应用紧固件紧固。
Ill
5.2载荷组合及计算
5.2. 1通则
升降机结构的设计和制造应能满足所有预定的作业工况所需的强度,包括安装、拆卸以及低温工作 环境等。
整机结构和各部件结构的设计应以5. 2列出的所有可能的载荷组合为基础,考虑吊笼和载荷处于 相对于导轨架及其附墙架最不利位置的载荷组合,且均应考虑吊笼的垂直和水平运动。导轨架和支撑 结构物之间的附墙架视为升降机结构的一部分。
5.2.2载荷和力
升降机结构和零部件的设计计算,应考虑5. 2. 2. I-5. 2. 2.15的载荷和力O
5.2.2. 1不运动件的静载荷
应考虑除吊笼和随吊笼一起运动的设备之外的所有静载荷。
5. 2. 2. 2运动件的静载荷
应考虑不带任何载荷的吊笼和随吊笼一起运动的设备的静载荷。
5∙2.2.3升降机支承层站平台和层门时的静载荷
如果层站平台和层门由升降机支承,应考虑其静载荷。
5.2.2.4额定载重量
⅛!
吊笼额定载重量对吊笼和导轨架受力的影响,应按下列情况考虑: p =F/A
式中:
P——吊笼底板单位面积上的额定载重量,单位为千牛每平方米(kN/m2);
F——额定载重量,单位为千牛(kN);
A——吊笼底板面积,单位为平方米(m2)。
a)如p∕O. 8<4. O kN∕m2 ,则假定额定载重量分布在减小的面积(AI)上,其大小为额定载重量除 以4. 0 kN∕m2,其长、宽之比与吊笼底板的长、宽之比相同。该面积的形状和位置可视为使导 轨和吊笼处于最不利的受力状态。见图1的示例。
图中:
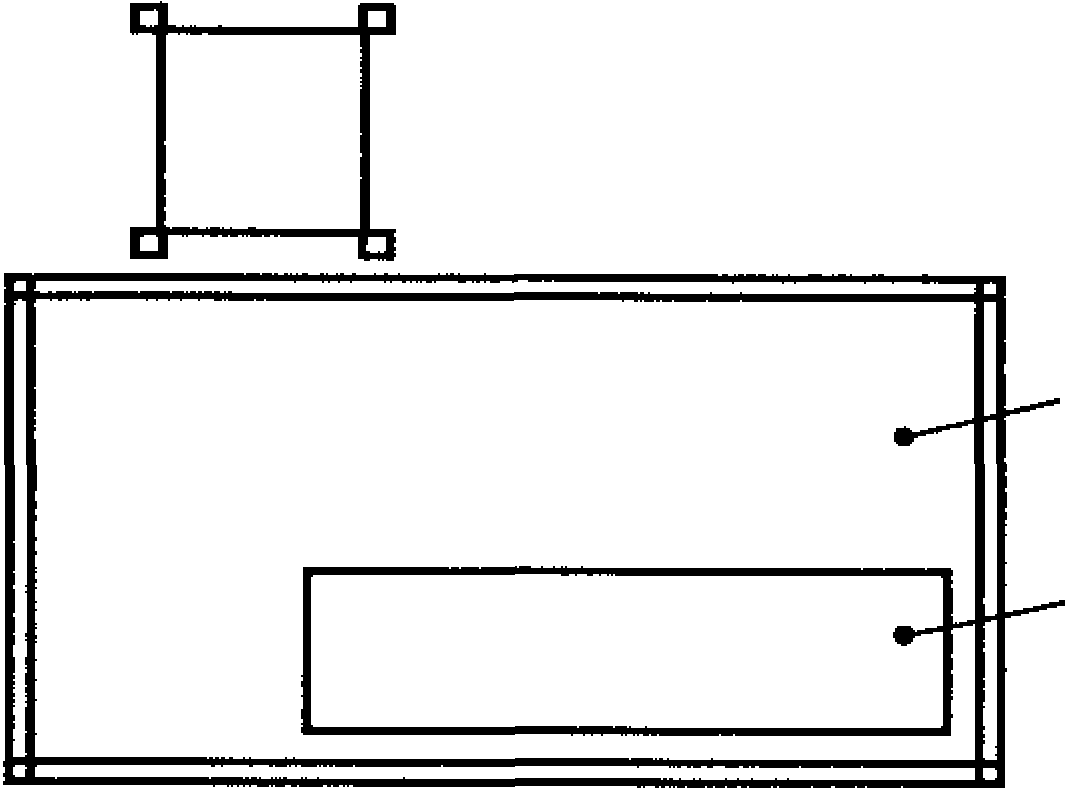
A
A——底板总面积,单位为平方米(n√)
AI=F [kN]∕4[kN∕m2'单位为平方米(m^)
b)如p/O. 8≥4. O kN∕m2,则假定额定载重量分布在减小的面积(A2)±,其大小为吊笼底板面积 的8。%,其长、宽之比与吊笼底板的长、宽之比相同。该面积的形状和位置可视为使导轨和吊 笼处于最不利的受力状态。见图2的示例。
图中:
A2 =O∙ 8A
图2 5.2.2.4b)的载荷示例
5. 2. 2.5其他情况的额度载重量
如力V4.0kN∕m2,则计算时吊笼底板面积(A3jA3=A)上的最小均布载荷应取为4. 0 kN/n?。见 图3。
5.2.2.6装载和卸载时产生的力
装载和卸载时产生的力(见图4)应视为垂直方向和水平方向力的同时作用,每个方向的力计算 如下:
■ -M-
——如额定载重量不大于20 kN,则垂直力FV为额定载重量的50%,但不小于2. 0 kN;如额定载重 量大于20 kN,则垂直力FV按公式(2)计算:
F* = 4 + 0* 3F
式中:
FV——垂直力,单位为千牛(kN);
F ——额定载重量,单位为千牛(kN)。
——水平力FH为额定载重量的20% ,但不小于0.5 kN,不大于2. 5 kN。
两个力都作用在吊笼入口宽度1/3处的底板平面上,且处于最不利方向和位置。计算导轨架和吊 笼的应力时,至少应考虑下列位置的装载和卸载力:
——吊笼门口;
——不是由层站支承的坡道或其他延伸面的前缘。
同时,额定载重量的其余部分(Fvi ,Fvi-F-Fv)应作用于吊笼底板的中心。
同样的力也应用于层站边缘和有关支撑结构的设计。使用说明书中应给出这些力的相关信息。
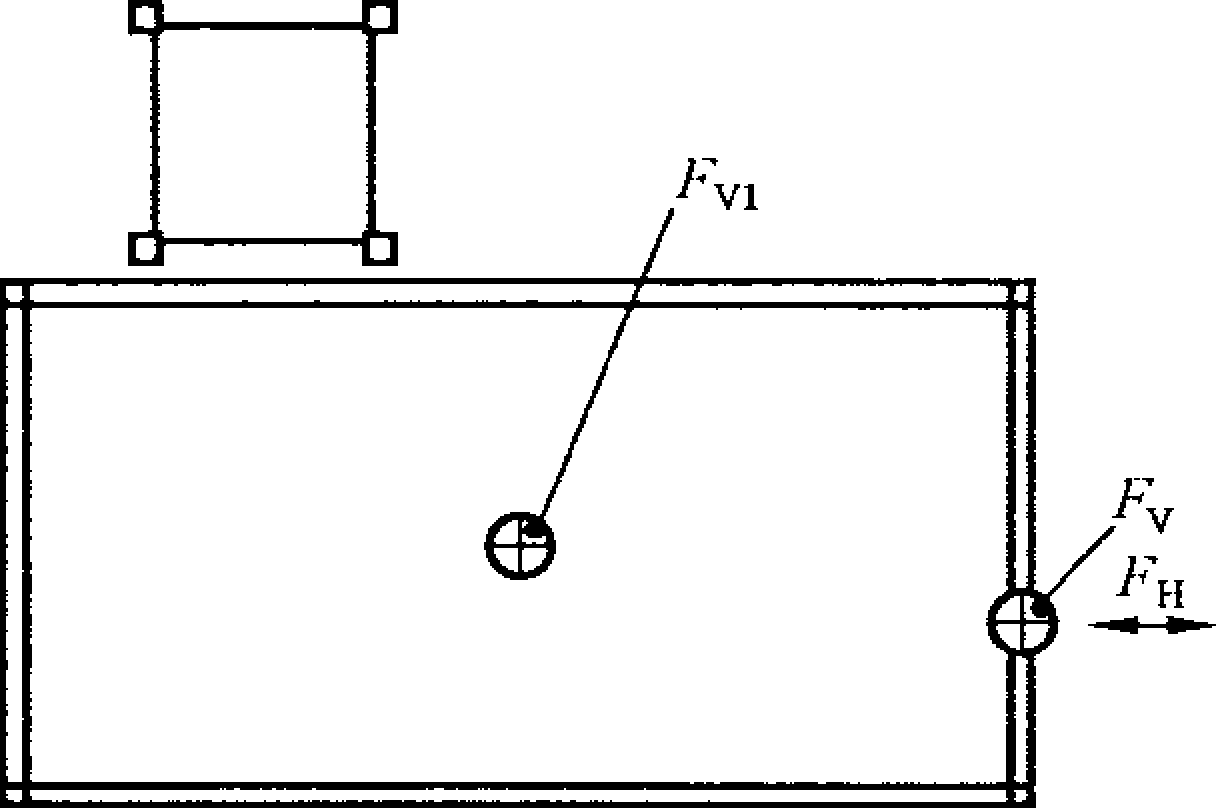
图4装载和卸载时产生的力
5.2.2.7冲击系数
运动载荷的作用力为所有实际载荷的重量(吊笼、额定载重量、对重、钢丝绳等)乘以冲击系数六=
1.1 + 0. 26物,其中P为额定速度,单位为m∕so如果其他系数被证实更准确,可使用其他系数。
5.2.2.8超速安全装置的冲击系数
超速安全装置动作引起的力为运动载荷的总和乘以系数2. 5。
如经在装载载荷最高到1. 3倍额定载重量包括传动系统的任何惯性力影响的所有情况下进行的试 验验证该系数较小,则可采用这个较小的系数,但应不小于1.2o
5.2.2.9站人吊笼顶应能承受的载荷
如吊笼顶用于安装、拆卸、维护/检查的通道或有紧急出口,则其任一 0.1 m×0. 1 m的区域应能承 受L2kN的载荷。
5.2.2.10不站人吊笼顶应能承受的载荷
V ^b⅞i
如吊笼顶不允许站人,则其任一 0.1 m×0.1 m的区域应能承受1. O kN的载荷。
5. 2.2.11吊笼底板应能承受的载荷
吊笼底板强度为:在0.1 m×0.1 m区域内应能承受1. 5 kN的静载荷或25%的额定载重量(取两 者中较大值,但最大不超过3 kN)而无永久变形。
5.2.2.12 设计风载
5. 2. 2. 12. 1 通则
设计风载按GB/T 3811计算,但作用在吊笼上的风载计算应符合5.2. 2.12.2的规定,风压按公式
(3)和5. 2. 2.12. 3计算和确定。
任何情况下都假定风在任意的水平方向吹,计算时应考虑最不利方向。
q = 0. 625 (τ9w)
式中:
q ——风压,单位为牛每平方米(N∕m2),不同情况的风压,还应符合5. 2. 2.12.3;
PW——风速,单位为米每秒(m∕s)o
5. 2.2. 12.2 作用在吊笼上的风载
以一
计算作用在吊笼上的风载时,应假定吊笼围壁是实体,并取其风力系数C=L 2。系数L 2包括形 状系数和挡风折减系数。
根据5. 6. 1. 3. 3,如果吊笼的设计允许将物料伸出吊笼外,应考虑附加的迎风区域,该区域应至少 相当于以吊笼顶开口为底、高为2 m的箱形实体。
5.2.2. 12.3 计算风压
作用在升降机上的计算风压,应至少考虑5. 2.2.12. 3. 1〜5. 2. 2. 12. 3. 3所述的三种情况。
5.2.2. 12.3. 1工作状态风压不考虑高度,风压最小值应为g-25O N∕m2 ,对应风速为% = 20 m∕so
在选择电动机功率进行阻力和发热计算时,可采用0. 6%
5. 2. 2. 12.3.2非工作状态风压取决于升降机高于地面的高度和安装地区。
|
非工作状态风压及其高度变化系数按GB/T 3811—2008表18 |
和表19选取。 |
|
5. 2. 2.12. 3. 3安装和拆卸工况风压不考虑高度,风压最小值应为q二 |
= 100 N/m2 ,对应风速 VW = I2. 5 In/SO |
5.2.2. 13安装垂直度误差
计算时考虑的安装垂直度误差应至少为0.5OO
5.2.2.14对重的有利作用
在安装和拆卸过程中,不考虑对重的有利作用。
5.2.2.15缓冲器产生的作用力
计算缓冲器产生的作用力时,除非有经过验证的更低值,否则采用Ig的减速度。
5.2.3安全系数
5. 2. 3. 1钢结构
钢结构构件及其连接的设计计算方法应符合GB/T 3811—2008中第5章的规定,并至少应进行强 度、稳定性和必要的连接、刚性等设计计算,但安全系数按表4选取。表4与表6载荷情况相对应。
表4钢结构安全系数
|
载荷情况 |
安全系数n |
|
A |
≥1.50 |
|
B |
≥1. 33 |
|
C |
≥1.25 |
5.2.3.2铝结构
铝结构应至少进行强度、稳定性和必要的连接、刚性等设计计算。计算应力时,应考虑结构的挠度。 可采用二阶理论进行计算。
注:可参考GB 50429。但应考虑其所采用的极限状态设计法与本标准采用的许用应力设计法、其所适用的工业与 民用建筑和构筑物与升降机结构的差异。
许用应力取为按公式(4)计算的最小值,安全系数按表5选取。表5与表6载荷情况相对应。
[σ]=σs∕n5 或 σh∕nh ..............................( 4 )
式中:
σ3——屈服强度,单位为牛每平方毫米(N∕mm2);
对应于屈服强度的安全系数,见表5 J
气——抗拉强度,单位为牛每平方毫米(N∕mm2);
以———对应于抗拉强度的安全系数,见表5。
表5铝结构安全系数
|
载荷情况 |
安全系数% (对应屈服强度) |
安全系数诳(对应抗拉强度) |
|
A |
≥1. 70 |
≥2. 50 |
|
B |
NL 55 |
≥2. 25 |
|
C |
2L41 |
≥2. 05 |
5.2.4载荷情况
应计算的不同载荷组合和力,见表βo
载荷情况
载荷情况序号
载荷情况用于
根据5. 2. 2. (Xy的力和作用力
载荷情况-
Ia
正常使用:(结构件,包括:导轨架、
附墙架、底架以及所有其他的非运动
结构件)
(1) L(3)、(12・3・1)、(13)
(2) 乘以(7)
(4)乘以(7)
Ib 正常使用:吊笼
(12, 3. 1)
(2)乘以(7)
(4)乘以(7)
∏a
吊笼正常装载:导轨架
(1).(2)^(3)
(6).(12.3. 1)
IIb
吊笼正常装载:吊笼
(2)、(6)
(12.3.1)
(I)C√3).(12. 3.1).(13)
IIIa
异常情况的力:导轨架
(2)乘以(7)
(5)乘以(7)
Il
异常情况的力:吊笼
LV
y:
(12. 3.1)
(2)乘以(7)
(5)乘以(7)
(I)CA3).(12. 3.1)√13)
IVa 异常情况下安全装置作用:导轨架 (2)乘以(8)
(4)乘以(8) (12.3.1)
IVb
异常情况下安全装置作用:吊笼
(2)乘以(8)
(4)乘以(8)
IVC
异常情况下安全装置作用:安全 装置
(2)乘以(8)
(4)乘以(8)
表6 (续)
载荷情况序号
载荷情况用于
根据5.2.2. (Xy的力和作用力

偶尔使用:吊笼顶允许站人
(9)乘以(7)
载荷情况b
B
V b 特殊使用:吊笼顶不允许站人 (10)
M 偶尔不使用「导轨架 (1人(3)、(12.3.2)、(13)
异常情况下缓冲器的力:下部缓冲 器作用在吊笼上
(2).(4).(15)

层站的独立支撑结构
⅛7
正常
偶尔
(3).(6)√12. 3.1)
(3)∖(12∙3∙2)
安装(结构件,包括T导轨架、附墙 架、底架以及所有其他的非运动 结构件) 1 2
(1) ∖(3).(12. 3∙3)J13)
(2) 乘以(7)
(4)乘以(7)
验算其稳定性,所有稳定力的系数都为
V
Γ≡ι
1. Oo
∑M1 ≥ ∑M2 × n0
式中:
MI——稳定力矩;

力矩;
各种倾翻力的稳定性安全系数,见表7o
表7各种倾翻力的稳定性安全系数外
如
|
载荷或力 |
根据 5. 2. 2. (X)4 |
安全系数TIQ |
|
不变载荷,静态 |
⑴、⑶ |
1.1 |
|
不变载荷,动态 |
(2) |
1.5 |
|
额定载重量 |
(4)、(5)、(6) |
1.5 |
|
工作状态风载 |
¢12.3.1) |
1.2 |
|
非工作状态风载 |
(12.3.2) |
1.2 |
|
安装和拆卸过程中的风载 |
(12. 3.3) |
1.2 |
|
安装误差 |
(13) |
1.0 |
|
a见表6的注a1, | ||
5.2.6 传动系统和制动系统零部件的疲劳应力分析
5.2.6. 1应对易发生疲劳破坏的所有承载件和连接件进行疲劳应力分析,如轴和齿轮。分析时应考虑 应力循环特性和应力循环次数,应力循环次数可以是载荷循环次数的数倍。
制造商应根据下列情况来计算确定应力循环次数:
——吊笼装有50%的额定载重量进行80 000次运动;
——吊笼空载进行80 000次运动;
应以每次运动(由静止到额定速度一以额定速度运行一减速至停止)的行程为20 m来进行传 动系统的计算(见7.1.2. 10) o
应考虑每个零部件向上运动和向下运动的最不利组合。
注:载人升降机运动的次数1.6X102是按间歇式工作方式计算得出的(如10年,每年40周,每周4。个小时,每小 时运动次)。
5.2.6. 2考虑到所有的应力集中效应,每根轴疲劳极限的最小安全系数为2.0。
5.3底架
5.3. 1底架应能承受升降机作用在其上的所有载荷,并能有效地将载荷传递到其支承面上。
5.3.2向支承面传递载荷时,不应通过任何弹性支承或充气轮胎。
5. 3. 3使用可调节的方式将力传递到地面时,支脚应能在与水平面夹角至少为15°的任何平面自由转 动,以防止结构中产生弯曲应力。如果支脚不能转动,应考虑最不利弯曲应力。
Ill
IIt
Ill
5.4
导轨架、附墙架和缓冲器
5.4.1导轨和导轨架
5.4. 1.1导轨可以是导轨架的一部分,或是伸缩连杆机构。导轨应是刚性的。不应使用柔性元件,如 钢丝绳或链条。
应限制导轨架或吊笼任何构件的变形,以避免发生碰撞事故(如与层站的碰撞)O
5. 4.1.2导轨或者导轨架应能承受5. 2中的所有载荷情况。
5.4. 1.3导轨架、导轨或连杆之间的连接应能有效地传递载荷并保持稳固。只有在有目的的人为操作
下,才允许产生松动。
5.4. 1.4伸缩连杆机构中的转动节点应便于在外部进行检查。
5.4. 1.5导轨/导轨架上的传动元件(如齿条)的固定件应能保证传动元件保持在正确的位置,以能向
导轨架传递规定的载荷且无松动,如使用锁紧螺母。
5.4.2
附墙架
l□
附墙架应能承受5. 2规定的载荷情况。应特别注意安装和拆卸过程中产生的作用力。
5.4.3缓冲器
5.4.3. 1
应在吊笼和对重运行通道的最下方安装缓冲器。
5.4. 3. 2装有额定载重量的吊笼以大于额定速度0. 2 m/s的速度作用在缓冲器上时,吊笼的平均减速 度应不大于Ig,减速度峰值大于2. 5g的时间应不大于0. 04 s(见5. 2. 2.15)o 5. 4. 3. 3使用液压缓冲器时,应提供检查油位的方法。应由电气安全开关监控液压缓冲器的动作,当
液压缓冲器被压缩时,吊笼不能通过正常操作启动O
5.5升降通道防护装置和层站入口 5.5.1 总则
为使用而安装的升降机,应配有:
地面防护围栏;
各层站入口处的层门;
其他必要的升降通道(含对重通道)防护装置。
以上装置可防止人员被运动件伤害和从升降机上坠落。5.5规定了这些装置的设计原则,第7章 中包含了这些装置的正确使用方法信息,第6章中规定了这些装置的验证方法。
5.5.2升降机地面防护围栏
5.5.2. 1升降机地面防护围栏应围成一周,高度应不小于2. O m,并应符合5. 5. 4. 1和GB 23821— 2009表1的要求。
地面防护围栏应设有围栏门。围栏门应视为层门,符合5. 5. 3. 2〜5. 5. 3. 7、5. 5. 3. 8. 1、
5.5. 3. 8.2.5. 5. 3. 8. 4、5. 5. 4. 1、5. 5. 5. 1 和 5.5.5. 3(其中的 5.5. 5. 3. 3 除外)的要求。
地面防护围栏及其关闭的门,其间隙、通孔和开口尺寸应符合5.5. 3. 8.5的要求,但其与正常作业 时的升降机运动件的距离不小于0. 85 m(额定速度大于0. 7 m/s时)或0∙ 5 m(额定速度不大于0. 7 m/s 时)时除外。
5. 5. 2. 2所有吊笼和运动的对重都应在地面防护围栏的包围内。
5. 5. 2. 3维护时为能从地面防护围栏门出入,围栏门应能从里面打开。
5. 5.3层站入口 5. 5. 3. 1 通则
升降机安装时,应在每个层站入口处,包括地面防护围栏上,安装层门。
5. 5. 3. 2层门的打开方向
层门不应朝升降通道打开。
5. 5. 3. 3实板层门
当层门由实板材料制成时,应能让使用者知道吊笼是否到达层站(见5. 6. 1.4.1. 2)。
5.5.3.4层门的导向装置
水平和垂直滑动门应有导向装置,其运动应通过机械式限位装置限位。
5. 5. 3.5层门的悬挂装置
垂直滑动的门应至少有两个独立的悬挂装置。柔性悬挂装置相应于其最小破断强度的安全系数应 不小于6,且有将其保持在滑轮或链轮中的措施。
用于垂直滑动门的滑轮直径应不小于钢丝绳直径的15倍。钢丝绳末端的连接应符合5.7. 3. 2.1. 6
的规定。
层门的平衡重应有导向装置,且应能防止其滑出导轨,即使在其悬挂失效的情况下。
门与平衡重的质量差应不大于5 kgo 应有保护手指不被门压伤的措施。
5. 5.3.6动力驱动的层门
对于动力驱动的层门,其动作和控制应符合GB 7588-2003中第7章的相关规定,并应考虑雨、冰
等环境的影响。
5.5.3.7层门打开或关闭的操控
不应利用由吊笼运动所操控的机械性装置来打开或关闭层门。
5. 5.3.8全高度层门(见图5)
全高度层门应符合5.5. 3. 8. 1〜5. 5. 3. 8.5的要求。
5.5.3.8. 1层门开口的净高度应不小于2. 0 mo在特殊情况下,当建筑物入口的净高度小于2.0 m 时,则允许降低层门开口的高度,但任何情况下层门开口的净高度均应不小于1.8 Ino
5. 5. 3. 8. 2装载和卸载时,吊笼门边缘与层站边缘的水平距离应不大于50 mmO
5. 5.3.8.3正常作业时,关闭的吊笼门与关闭的层门间的水平距离应不大于150 mmO否则应有措施 使其符合要求,或者配备符合5.5. 3. 9.4要求的层站入口侧面防护装置。侧面防护装置与吊笼或层门 L
之间任何开口的间距应不大于150 mm。
5.5.3.8.4层门关闭时应全宽度遮住升降通道开口。
5.5.3.8.5门关闭时,除门下部间隙应不大于35 mm外,任一门与相邻运动件的间距有关的任何通孔 和开口的尺寸及门周围的间隙或零件间的间隙,应符合GB 23821-2009表4的规定,并满足5.5.4. 1 的要求。
说明:
1 层门高22 mo
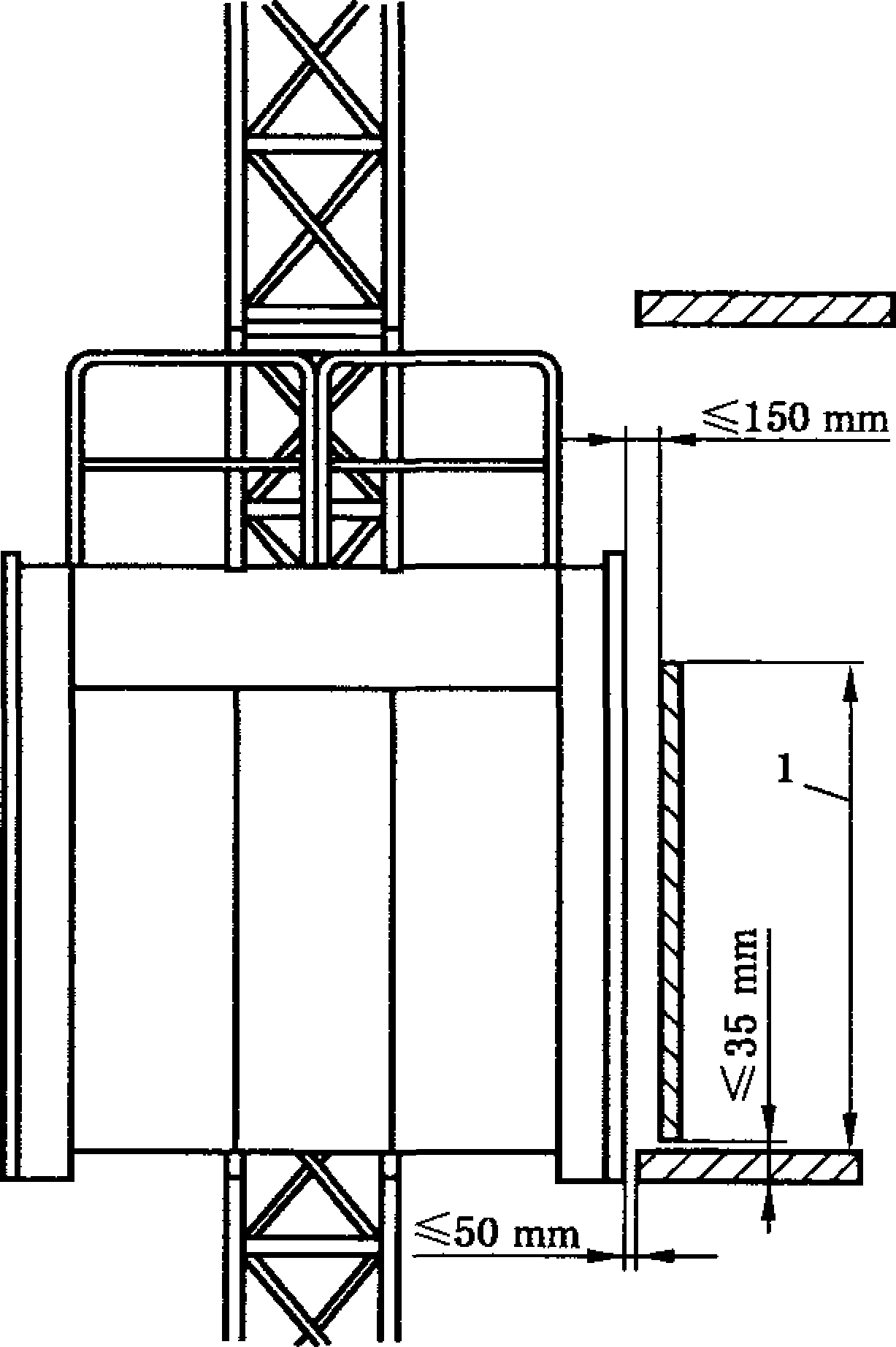
全高度层门示例
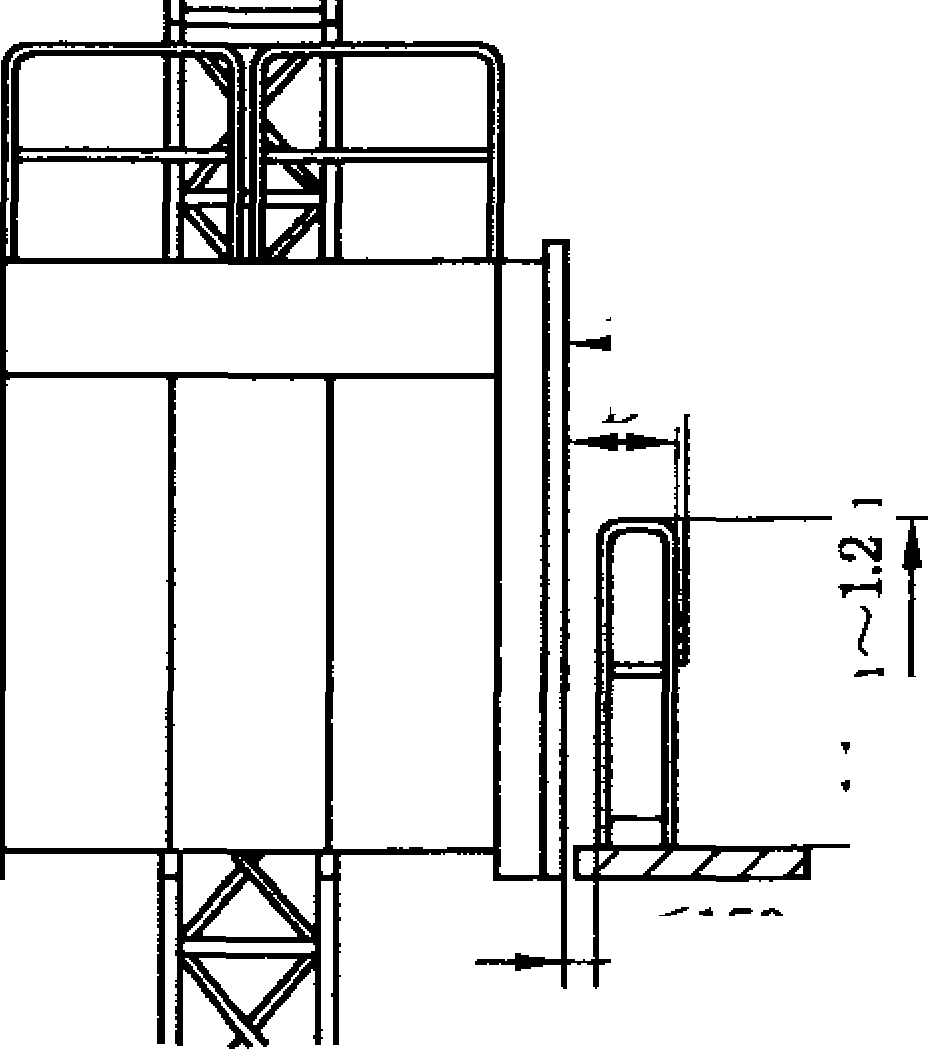
5.5. 3. 9
低高度层门(见图6和I
7)
除了地面防护围栏外,可使用低高度层门,低高度层门应满足5. 5. 3. 9. 1-5. 5. 3. 9. 7的要求。
5. 5. 3. 9. 1 层门高度在Llm和L 2 m之间o 5. 5. 3* 9. 2层门上部的内边缘与正常作业时的升降机任一运动件之间的安全距离(A,见图6和图7)
应不小于0. 85 m;如果额定提升速度不大于0. 7 m/s,则此安全距离可为0. 50 mo层门上部的外边缘 与正常作业时的升降机运动件的安全距离(B,见图6和图7)应不小于0. 75 m;如果额定提升速度不大 于0. 7 m/s,则此安全距离可为0.40 mo
√4≥5OO mm
B
W150 mm
∈
τ-≡⅛
安全距离A不小于500 mm的低高度层门示例

√4≥500 mm
B
季]50 mm
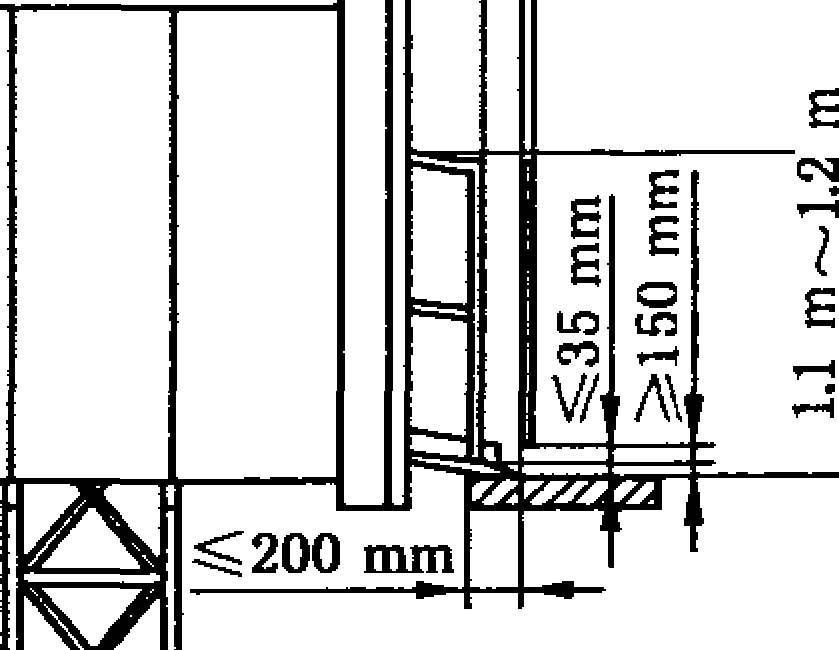
图7安全距离A不小于500 ɪnm的低高度层门,吊笼上有坡道以填充间隙的示例
5.5. 3. 9. 3层门应全宽度遮住开口,并应至少有防护栏杆、半高的中部横杆和至少高于地面150 mm 的护脚板,护脚板与地面的间隙应不大于35 mm,并符合5. 5. 4. 2的要求。如果在上部防护栏杆以下 1. 1 m〜L 2 m之间,层门内边缘的任一部分与升降机运动部件的距离小于0.5 m时,层门上的任一开 口均应不能穿过直径为50 mm的球体,并符合5. 5. 4.1和5.5.4. 2的要求。
5. 5. 3. 9. 4当吊笼边缘与层站边缘或吊笼与层门之间的水平距离大于15Omm且无其他结构有效防 护时,应配备层站入口侧面防护装置。侧面防护装置的高度应在LIm~L2m之间,中间高度设横杆, 护脚板至少高于地面150 mm,并符合5. 5. 4. 2的要求。
5. 5. 3. 9. 5侧面防护装置与吊笼或层门之间任何开口的间距应不大于150 mm;当侧面防护装置设在 吊笼上时,关闭的层门的外边缘与面向升降机的层站边缘之间的距离应不大于200 mmO见图6和 图7。
5.5. 3. 9. 6如果层站上设有侧面防护装置,且吊笼做垂直运动时与层门保持0. 85 m或者0.5 m的安 全距离,则吊笼与侧面防护装置之间的最小间距应为100 mm。
5. 5. 3. 9. 7卸载和装载时,吊笼门边缘与层站边缘的水平距离应不大于50 mmO 5.5.4升降通道防护装置的材料 5. 5. 4. 1对于全高度层门,在其锁定的位置,用一个刚性的5 000 mm2的方形或圆形平坦表面将300 N 的法向力施加到门的任一面上的任何位置时,门应:
"—能承受且无永久变形;
--弹性变形不大于30 mm;
试验之后工作正常。
当用一个刚性的5 000 Inm2的方形或圆形平坦表面,将600 N的法向力施加到门的任一面的任何 位置时,门可不满足上述要求,但应保持安全。
5. 5. 4. 2对于低高度层门,当用IkN的垂直力作用到层门顶部的任一位置,用300 N的水平力作用在 顶杆、中间杆、护脚板上任一位置时,门应:
——能承受且无永久变形;
——试验之后工作正常。
5.5.4.3其他升降通道(含对重通道)防护装置应根据其结构与全高度层门或低高度层门的相似情况, 符合 5. 5.4. 1 或 5. 5. 4. 2、5. 5. 3. 9. 3 的要求。
5.5. 4.4其他升降通道防护装置(含对重通道)和门还应符合7.1. 2. 7.1.1的要求。
5.5.5层门门锁装置 5. 5. 5. 1 全高度层门(见5. 5. 3.8)
正常作业工况下;
吊笼底板离预定层站的垂直距离在±。・15 m以内时才能打开该层门,否则无法打开任何 层门;
只有在所有层门都在关闭位置时才能启动或保持吊笼的运行,但采用5. 7. 3. 3. 8所述的再平 层措施时除外。
当载有额定载重量的吊笼从额定速度开始制动,其最大制动距离大于0. 25 m时,则:
——无法打开任何层门,除非吊笼停止在预定层站的士O.25m以内,且
——无法在正常作业工况下启动或保持吊笼的运行,除非所有的层门处于关闭和锁紧位置。
紧急开锁:每个层门都应能用符合GB 7588—2003附录B要求的钥匙从层站侧开锁。
5. 5. 5. 2 低高度层门(见5. 5. 3. 9)
层门应配备可核验其关闭和锁紧位置的联锁装置。该联锁装置的动作应在吊笼门口处控制。用简 单的方法应不能干扰该联锁装置的动作。
只有所有层门都在关闭和锁紧位置时才能启动或保持吊笼的运行,但釆用5. 7. 3. 3. 8所述的再平 层措施时除外。
5. 5. 5. 3 设计
5. 5. 5. 3. 1门锁装置中的电气接触器应是安全接触器。见5.9.6。
5-5.5.3.2全高度层门(见5.5.3.8)配备的门锁装置,以及所有相关的致动装置和电气接触器,其安 装位置或防护应只能使专业人员在层站上易于接近。
5.5.5.3.3低高度层门(见5. 5. 3. 9)配备的门锁装置,应只有借助工具才能使其电气安全装置不起 作用。
5. 5. 5. 3. 4
5.5.5.3.5
5.5.5.3.6
5. 5. 5. 3. 7
5. 5. 5. 3.
门锁装置应安装牢靠,固定件应有防松措施O
门锁装置和固定件在锁紧位置应能承受1 kN沿开门方向的力。
门锁装置应可维护。不防粉尘或水的机械部件,其防护等级应不低于IP44(GB 4208)° 可拆式罩盖的拆除应不干涉任何锁紧机构或配线。所有可拆式罩盖应由紧固件固定。 锁紧元件应借助弹簧或重力保持在锁定位置。若用弹簧,则应是压缩弹簧且有导向,弹簧
失效不应导致锁紧不安全。
5. 5. 5. 3. 9只有在所有锁紧元件的接合长度不少于7 mm时,吊笼才能保持运行。
5.5.5.3. 10当打开全高度层门(见5.5.3.8)产生的间隙超过5.5.3. 8.5的规定时,门锁装置中的电 气接触器应能阻止吊笼运行。
5.5.5.3.11对于悬板式门锁装置,层门关闭后,悬板应与门扇全宽度重叠,足以防止在进行制造商预 定的维护时层门打开。
5.5.6 间距
5.5. 6. 1 总则
本标准未规定的安全距离,应符合GB 23821的相关规定。所有间隙应符合GB 12265. 3的相关
规定。
5. 5.6.2吊笼下方空间
在吊笼下方设置维护用安全通道时,应采取措施(移动式支架或类似工具)使其下方空间的垂直距 离不少于1.8mo
该空间应延伸至吊笼下方全部区域。安装和拆卸该空间支承的工作人员,应可不必在吊笼底下。
5.6吊笼 5. 6. 1 总则
吊笼应完全封围。
规定吊笼最多可载人数时,应按人均占用吊笼底板面积0. 2 m2计算,每个人的体重应按75 kg计。
吊笼结构应根据5. 2计算。
吊笼应有刚性的导向装置以防止脱落或卡住。
*_F
吊笼应具有有效的装置使吊笼在导靴或滚轮失效时仍能保持在导轨上。
应有防止吊笼驶出轨道的机械措施。这些措施在升降机正常作业、安装、拆卸或维护/检查时,均应 起作用。
应有有效措施,以能检测到不稳固的导轨架节,且能防止吊笼进入该导轨架节或者能保证吊笼不离 开稳固的导轨架节。
5.6. 1. 1吊笼底板
吊笼底板应能承受5. 2. 2.11规定的力,并能防滑(如采用花纹钢板)和自排水。
5.6. 1.2吊笼围壁
吊笼底板与吊笼顶之间应全高度有围壁,并应符合5-5- 4.1的规定。
围壁上的开口应符合GB 23821—2009表4的规定,且不能穿过直径为25 mm的球体。
■zi
任何危险的凸出物,均应按GB 2894进行标志。
5.6∙ 1.3 吊笼顶
5.6. 1.3. 1吊笼应封顶。
5.6. 1.3.2吊笼内的净高度应不小于2. Omo
5.6. 1.3.3运送较长材料时,如果能保证材料不伸到升降通道外,吊笼顶可开最大面积为0. 15 m2的 开口。开口应设有盖门。
III
a:
5. 6. L 3. 4如果吊笼顶用于升降机自身的安装、拆卸、维护/检查或设有紧急出口,则顶板应防滑且周 围应设护栏。
护栏应由上部栏杆、半高的中间横杆和护脚板等组成,上部栏杆应至少高出吊笼顶1. 1 m,护脚板 高度不小于150 mmO在吊笼顶护栏封围的区域内,应可安全地进行安装、维护或检查作业。吊笼顶板 边缘与护栏的水平距离应不大于200 mmO
—⅛⅛F
5. 6. 1.3. 5如果另一吊笼或对重的运动件与护栏内边缘的距离在0. 3 m以内,则应对该运动件设置高 度不少于2.0 m的附加护栏,且其每侧应比运动件宽出0.1 Ino
5. 6. 1.3.6 吊笼顶结构应根据5.2.2 9和5.2. 2. 10计算。
5.6. 1.3.7若笼顶有通孔,则应不能穿过直径为25 mɪn的球体。
5. 6. 1.4吊笼门
5.6. 1.4. 1手动操作的门
5.6. 1.4. 1. 1吊笼门开口的净高度应不小于2. 0 m,净宽度应不小于0. 6 mo
门应能完全遮蔽开口。
门关闭时,除门下部间隙应不大于35 mm外,门上的通孔及门周围的间隙或零件间的间隙,应符合 GB 23821—2009表4的要求,且不能穿过直径为25 mm的球体。
5.6. 1.4. 1.2实板门应有视窗,视窗面积应不小于25 000 InnI2 ,其尺寸和位置应可看见层站边缘。
5. 6. 1.4. 1.3 门的设计应符合5. 5. 3. 4〜5. 5.3. 7的要求。
5.6. 1.4. 1.4门应配备机械锁以保证正常运行时其不会打开,除非吊笼底板与层站的距离符合 5.5.5.1的规定。
5. 6. 1.4. 1.5所有吊笼门都关闭时,吊笼才可以启动或保持运行状态。
5. 6. 1.4. 1.6吊笼门应能承受作用在任何位置的300 N的推力,且不出现永久变形、不脱离其导向装 置,弹性变形不大于30 InlnO 300 N的推力用一个刚性的5 000 mm2的方形或圆形平坦表面来施加。
5. 6. 1.4. 1.7 应采取措施满足5.5.3. 8. 2、5. 5. 3. 8. 3.5.5. 3. 9. 5、5. 5. 3. 9. 7的要求,除非这些要求是 通过打开吊笼门来实现的。
5. 6. 1.4. 1. 8吊笼入口处所有机械和电气安全装置的设计应符合5. 5. 5. 3. 1以及5. 5. 5. 3. 4〜 5.5.5.3.11 的要求。
5- 6. 1.4. 1.9吊笼门锁装置及其相关的致动装置和电气接触器,其安装位置或防护,应能使在所有的 吊笼门关闭后,吊笼内未经授权的人员难以接触到。
5. 6. 1.4.2动力驱动的门
吊笼门如是动力驱动,则其动力操作系统应符合GB 7588—2003中第8章的相关要求,并应考虑 环境如雨、冰等的影响。除此之外,应符合5. 6. 1. 4.1的相关要求。
5. 6. L5紧急出口 5. 6. 1.5. 1对吊笼内乘员的救助总是使其能从吊笼内出来,5.11提供了有关的紧急操作。 5. 6. 1. 5. 2吊笼上应至少有一扇门或活板门用做紧急出口。这些门应可在吊笼外不借助钥匙打开,或 在吊笼内用特定的钥匙打开。紧急出口可以是吊笼门、吊笼顶活板门或其他紧急逃离门。
5.6. 1.5.3紧急出口门的锁应有电气安全装置,并符合5.9.6的规定。当门未锁紧时,电气安全装置 应使升降机停止运行;只有在重新锁上后,方可恢复升降机的正常工作。
5.6. 1.5.4吊笼顶活板门应有电气安全装置,并符合5.9.6的规定。当活板门未关闭时,电气安全装 置应使升降机停止运行。
5.6. 1.5.5若在吊笼围壁上设有紧急出口门,其尺寸应至少为0.4 InXL 4m,且应向吊笼内打开或是 滑动式的,或提供其他通往导轨架或建筑结构物的安全通道。
lɪl
5.6. 1.5.6吊笼顶活板门尺寸应至少为0.4mX0.6m,且不应向笼内打开。抵达活板门的梯子应始 终置于吊笼内。
5.6.2吊笼防坠安全装置
应设有防止吊笼坠落的安全装置。
安全装置应为下列类型中的一种:
——超速安全装置,在吊笼超速时动作;
——破断阀。
5.6.2. 1安全装置在任何时候都应起作用,包括安装、拆卸和动作后重新设置之前。除齿条外,其他常 规的传动件不应用于超速安全装置。
5.6.2.2安全装置应能使装有L 3倍额定载重量的吊笼停止并保持停止状态。安全装置应根据5.2 特别是5. 2. 2. 8进行计算。
在吊笼内载荷不超过额定载重量时,对于额定速度不大于2.4 m/s的升降机,安全装置停止吊笼时 的制动距离应符合表8的规定,且减速度峰值大于2. 5g的时间应不大于0. 04 s;对于额定速度大于 2.4 m/s的升降机,安全装置停止吊笼时的平均减速度应在0. 2g〜L Og之间,且减速度峰值大于2. 5g 的时间应不大于0. 04 SO如果在动作后重新设置之前安全装置再动作,则可超过前述的规定值。
表8安全装置制动距离
|
升降机额定速度P m/s |
安全装置制动距离 m |
|
τ∕≤0. 65 |
0. 10 〜L 40 |
|
0. 65<τ≤1.00 |
0. 20~L60 |
|
1.00<τ≤1.33 |
0. 30—1.80 |
0∙40~2. 00
1.33<v≤2.40
5.6.2.3
5. 6. 2.4
5. 6. 2. 5
5. 6. 2. 6 触发。
5.6.2.7
5. 6. 2 J
5.6.2.9
5. 6. 2. 10
一旦超速安全装置动作,正常控制下的吊笼运动应由符合5.9.6的电气安全装置自动停止。 安全装置的释放方法应要求专业人员介入,以使升降机恢复正常作业。
应能在与吊笼有充分安全距离的位置,利用遥控装置对安全装置进行试验。
对于不是由液压油缸直接支承的任何吊笼,安全装置应安装在吊笼上并由吊笼超速来直接 应有措施(如铅封)防止对限速器动作速度作未经授权的调整。
限速器用滑轮不应安装在悬挂吊笼的钢丝绳滑轮支承轴上。
超速安全装置不应借助于电气、气动装置来动作。
除超载外,在所有载荷情况下,安全装置动作后,吊笼底板相对于正常位置的倾斜应不大于
5%,且能恢复原状而无永久变形。
5.6.2. 11
5.6.2. 12
5.6.2. 13
速度超过额定下行速度0-4 m/s时,破断阀应能停止吊笼。破断阀应直接安装在油缸端口上。
5. 6. 2. 14用于限速器的钢丝绳及其末端连接等,其尺寸和设计应符合5. 7. 3. 2.1的要求。
限速器用钢丝绳,在升降机安装期间,应直接悬挂在导轨架上。
限速器动作时,限速器钢丝绳的张力应至少为下列的较大值:
——300 N,或
——安全装置起作用所需力的两倍。
5. 6. 2. 15夹紧一个以上导轨的安全装置应在所有导轨上同时起作用。
5.6.2. 16由弹簧来施加制动力的安全装置,其任一弹簧的失效都不应导致安全装置产生危险故障。
安全装置的动作速度应不大于升降机额定速度0.4 m/sO
应有措施防止安全装置因外部物质的积聚或大气状况的影响而失效。
由液压油缸或非柔性元件直接支撑的且未设超速安全装置的吊笼,应设有破断阀。在吊笼
■ ■
«!
5. 6.3超载检测装置
5. 6. 3. 1应配备超载检测装置。在吊笼内载荷超过额定载重量10%以上时,超载检测装置在吊笼内 应给出清晰的信号,并阻止其正常启动。
本标准规定了超载检测方法,但未要求配备载荷-力矩检测装置,因为力矩可通过与超载检测装置 相结合的稳定性和应力计算(5. 2)来确定。
不应设有使用者可取消警告信号的装置。
超载检测应至少在吊笼静止时进行。
5. 6. 3. 2超载指示器、检测器的设计和安装,应在不拆卸和不影响指示器和检测器性能的情况下,满足 升降机超载试验的需要。
5. 6. 3. 3
5. 6. 3. 4
5. 6.3.5应对超载检测装置加以保护,以防止其因冲击、振动、使用(包括安装、拆卸、维护/检查)和制 造商规定的环境影响而损坏。
y:
超载检测装置控制系统的安全相关部件应符合表A. 1的要求。 如果动力中断,超载检测装置的所有数据和指示刻度应能保留。
-a
传动系统
总则
5
5
5
5
5
7
7
7
7
7
1
2
3
4
5
每个吊笼应至少设有一套独立的传动系统。
每套传动系统应根据5. 2,包括5. 2. 6给出的具体要求计算。
驱动电动机应通过不能脱开的强制式传动系统与巻筒或驱动齿轮连接。
在正常作业时,吊笼应能在动力作用下随时升降。对于液压式升降机,吊笼可通过自重下降。
在正常作业工况,吊笼空载上升或额定载重量下降的速度应不超过其额定速度的15 % O
*1
防护装置和可接近性
5
2. 1在正常作业时,传动件及相关设备的安全距离如有小于0. 50 m的,则应按GB/T 8196的规
定对其进行防护。安全距离应符合GB 23821和GB 12265. 3的相关规定。
5- 7. 2. 2应设置固定的防护装置,防止可能损坏传动件的物质进入,如砂砾、雨、雪、冰、泥土或粉尘。
5.7.2.3齿轮、皮带、链条、旋转轴、飞轮、滚轮、联轴器及类似的旋转件应有有效的防护装置。但通过 设计或布置已使其安全,且被设计成在日常检查和维护时易接近的零件除外。
防护装置关闭时,其与相邻运动件的间距有关的任何通孔和开口的尺寸,应符合GB 23821-2009
表4的要求。
5.7.3悬挂系统
5.7.3. 1
齿轮和齿条传动
5.7.3. L 1 总则
5. 7.3. 1. L 1
驱动齿轮和超速安全装置齿轮应直接固定在轴上,不应釆用摩擦和夹紧的方法连接。
5.7.3. 1. 1.2
5.7.3. 1. 1.3
5.7.3. 1. 1.4
5. 7.3. 1. 1.5
安装时,安全装置齿轮应位于驱动齿轮之下O
齿条应可靠固定。齿条的接合处应对正,以避免错误啮合或损坏齿。
应防止异物进入驱动齿轮或安全装置齿轮与齿条的啮合区间O
对其他齿类传动,如销齿条,同样应符合5. 7. 3. 1. 1-5. 7. 3. 1.4的规定,并具有同样的
安全系数。
5. 7. 3. 1.2 设计
5.7.3. 1.2. 1 齿轮
齿轮设计应按ISO 6336-1JSO 6336-2、ISO 6336-3和GB/T 3480. 5考虑其弯曲强度和接触强度,
并应考虑5.2.6的要求。
弯曲疲劳强度安全系数应不小于2. 0,并考虑使用说明书规定的最大磨损量。
Ill
IH
接触疲劳强度安全系数应不小于L 4。
5.7.3. 1.2.2 齿条
应采用与其啮合齿轮磨损情况相适应的材料制造,其设计应按ISo 6336-1JSO 6336-2、ISO 6336-
3和GB/T 3480. 5考虑其弯曲强度和接触强度,并应考虑5. 2. 6的要求。
Ill
Ill
静强度安全系数应不小于2.0,并考虑使用说明书规定的最大磨损量。
5. 7. 3. 1.2.3载荷分配
当有多个驱动齿轮与齿条啮合时,应有自我调节措施将载荷合理分配到每个驱动齿轮上,或传动系
统的设计符合载荷在齿轮间合理分配的所有正常工况。
5. 7. 3. 1.3 模数
齿轮与齿条的模数应
当传动系统中的背轮或其他啮合控制功能直接作用到齿条上而没有任何其他的导轨架组成件 干预时,不小于4; 当背轮或其他啮合控制装置通过与齿条直接接触的其他的导轨架组成件而作用到齿条上时, 不小于6。
5. 7.3. 1.4 齿轮齿条啮合
5. 7.3. 1.4. 1应采取措施保证各种载荷情况下齿条和所有驱动齿轮、安全装置齿轮的正确啮合。这样
的措施应不仅仅依靠吊笼滚轮或滑靴。
正确的啮合应是:齿条节线和与其平行的齿轮节圆切线重合或距离不大于模数的1/3(见图8)。
5. 7.3. 1.4.2应采取进一步措施,保证当5. 7. 3.1.4.1的方法失效时,齿条节线和与其平行的齿轮节
圆切线的距离不大于模数的2/3(见图9)o
说明:
齿轮;
齿条;
齿顶圆直径;
齿轮节圆直径; 齿根圆直径; 齿条节线;
Tn——齿轮模数;
最大为模数的1/3。
d1 do d2 d
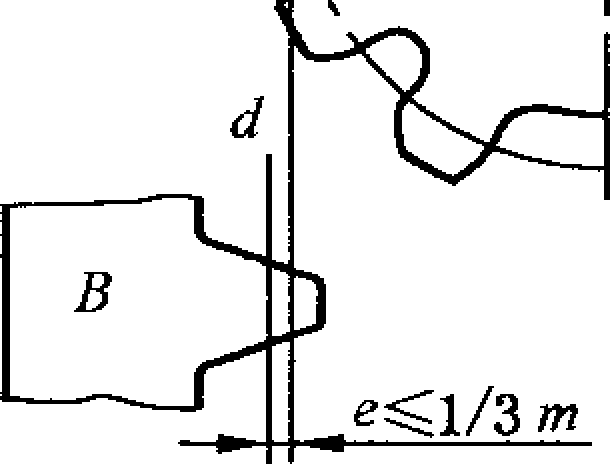
齿轮齿条的正确啮合间隙
说明:
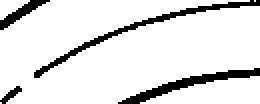
齿轮J
齿条;
di
d2
d
齿顶圆直径;
齿轮节圆直径; 齿根圆直径; 齿条节线;
m ——齿轮模数;
最大为模数的2/3。
齿轮齿条的最大啮合间隙
5. 7. 3. 1.4.3应采取措施保持齿轮与齿条啮合的计算宽度(见图IO)O
5. 7. 3. 1.4.4应采取进一步措施,保证当5. 7. 3.1.4. 3的方法失效时,至少有90%的齿条计算宽度参
与啮合(见图II)O
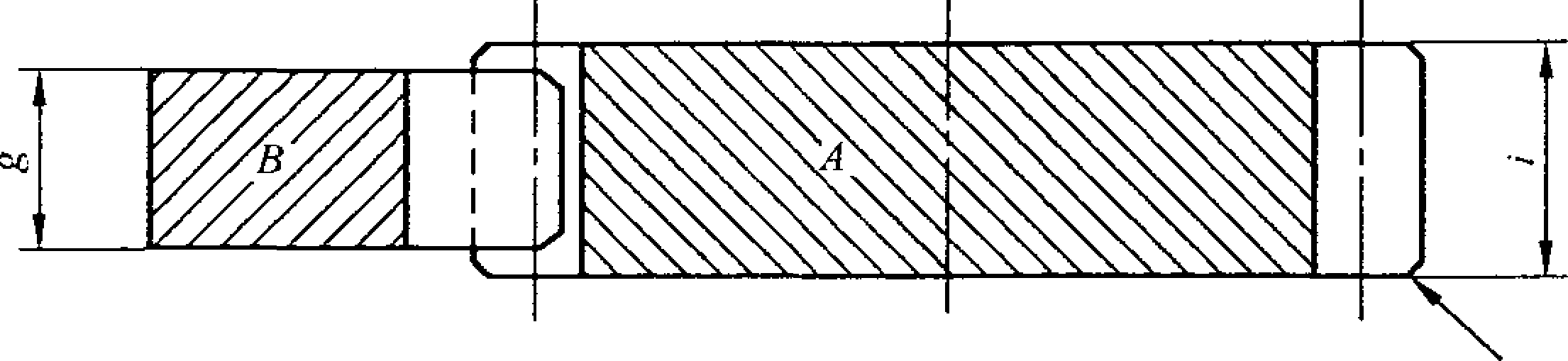
C
说明:
A —齿轮;
B ——齿条;
C —倒角;
齿轮节圆直径;
齿条宽度;
齿轮齿宽。
l£
图W 齿轮齿条宽度方向的正确啮合
说明:
A --齿轮;
B——齿条;
C——倒角;
齿轮节圆直径;
齿条宽度;
90%齿条宽度;
齿轮齿宽。
do
11
齿轮齿条的最小啮合宽度
5. 7. 3. 2悬挂吊笼和对車的钢丝绳 5. 7. 3. 2. 1钢丝绳要求 5. 7. 3. 2. 1. 1应采用钢丝绳。
5. 7. 3. 2. 1.2悬挂用钢丝绳应不少于两根,且相互独立。若采用复绕法,应考虑钢丝绳的根数而不是
其下垂的根数。
应设置自动平衡悬挂钢丝绳张力的装置O任何弹簧都应在压缩的状态下工作。
当单根钢丝绳过分拉长或破坏时,电气安全装置应停止升降机的运行(见5.10. 3) O
5. 7. 3. 2. 1. 3 钢丝绳直径应不小于8 mmO
5. 7.3.2. L 4钢丝绳的特性应至少符合GB/T 20118的要求。
5. 7.3.2. 1.5悬挂钢丝绳的安全系数应:
卷筒驱动的,212; 间接液压驱动的,212;
——悬挂对重的,26。
钢丝绳的安全系数是其最小破断载荷与最大静力之比。
5.7.3.2. 1.6钢丝绳末端连接(固定)的强度应不小于钢丝绳最小破断载荷的80%。如果钢丝绳的末 端固定在升降机的驱动卷筒上,则卷筒上应至少保留两圈钢丝绳。
钢丝绳末端应采用可靠的方法连接或固定(见图12),如:
——金属或树脂浇铸的接头;
——带套环的编结接头;
——带套环的压制接头;
——楔形接头;
——钢丝绳压板(可使钢丝绳在卷筒上有保留圈的钢丝绳固定装置)。
不得使用可能损害钢丝绳的末端连接装置,如U形螺栓钢丝绳夹。
ElllHHlHlHllllillllHU
12钢丝绳末端连接方法和绳具示例
5.7.3.2. 1.7
5.7.3.2. 1
5.7.3.2. 1.9
为防止钢丝绳被腐蚀应电镀或涂抹适当的保护化合物。
滑轮或卷筒节圆直径与钢丝绳直径之比应不小于30o
钢丝绳的储存应满足以下要求:
在张紧力下储存升降机接高备用钢丝绳时,应卷绕在带有螺旋绳槽的卷筒上。卷筒节圆直径 与钢丝绳直径之比应不小于15。
ItI
如在无张紧力下储存钢丝绳,则可用无绳槽卷筒多层卷绕。释放钢丝绳张紧力的装置,应使被 储存的钢丝绳的弯曲直径不小于钢丝绳直径的15倍。当钢丝绳绳夹压紧点之前的钢丝绳的 张紧力,是在节圆直径不小于钢丝绳直径15倍的非转动卷筒上至少绕3圈来释放时,则因钢 丝绳夹不会对钢丝绳造成损害而可使用O
卷筒两端应有挡板,挡板边缘超出最外层钢丝绳的距离应大于钢丝绳直径的2倍。
5.7.3.2.2 滑轮
Γnl V — I
滑轮应满足下列要求:
绳槽应为弧形,槽底半径R应满足:L 05r≤jR ≤1. O75r,其中r为钢丝绳半径;深度不少于 1.5倍钢丝绳直径;
引导钢丝绳上行的滑轮应防止异物进入;
应釆取有效措施防止钢丝绳脱槽;
钢丝绳与滑轮轴平面法线的夹角(钢丝绳偏角)不超过2. 5Oo
5.7.3.2.3 卷筒传动要求
钢丝绳只允许绕一层。若使用自动绕绳系统,允许绕两层。
留在卷筒上的钢丝绳应不少于两圈。
卷筒两端应有挡板,挡板边缘超出最上层钢丝绳的距离应大于钢丝绳直径的2倍。
卷筒应有钢丝绳槽。
钢丝绳与绳槽的偏斜角度(钢丝绳偏角)应不大于4oo 绳槽应满足下列要求:
绳槽的轮廓应为弧形,角度不小于120°,槽底半径R应满足:L 05r≤^≤l. 075r,其中r为钢 丝绳半径;
绳槽深度不小于钢丝绳直径的1/3; 绳槽的节距应不小于1. 15倍钢丝绳直径。
5.7.3.3液压油缸(直接或间接驱动或伸缩连杆机构)
应设置联锁装置以防止吊笼的上行运动,除非泵在正常工作压力下工作。
止回阀和油缸之间,应设有带截止阀的压力表。
应设有截止阀。截止阀应安装在油缸到单向阀和下行方向阀的回路上。
油缸和活塞杆应能承受至少2. 3倍的满载压力,相对于屈服强度的安全系数不小于1. 7o mm,计算得出的空心活塞杆
5.7.3.3. 1
5.7.3. 3.2
5. 7. 3. 3. 3
5. 7.3.3.4
!≡
考虑到腐蚀作用,计算得出的油缸壁厚度和油缸基座厚度,均应增加1.0
壁厚应增加0. 5 mmo
5.7.3.3.5压力作用下的油缸,其稳定性计算应符合通用技术准则。计算载荷为额定载重量、吊笼总 重和50%的活塞杆重量或者50%的伸缩连杆机构总重之和的L 4倍。
长细比大于250时,安全系数应不小于3. 0。
5. 7. 3. 3. 6如果采用一个以上的油缸提升吊笼,油缸应通过液压连接起来,以保证压力平衡和破断阀 能控制所有的油缸。
5. 7. 3. 3. 7在吊笼处于最低位置处(吊笼静止在被压缩的缓冲器上)时,活塞不应接触到油缸筒底部。
5. 7. 3. 3. 8应有适当措施,如通过夹紧或棘爪装置,防止吊笼由于液压系统泄漏而从层站下滑的距离 大于0.12 mo这些措施应按GB 21240—2007的第9章来设计。如果吊笼的某个部件突出到层站,如 连接坡道等,则应确保吊笼蠕动或再平层时,不会产生伤害或危险。
5. 7.4制动系统
5.7.4. 1每个吊笼都应设有制动系统,在下列情况下制动系统应能自动动作:
--主动力源失效;
——电控或液控回路失电或失压。
5. 7. 4. 2制动系统中至少要有一个机-电式或机-液式制动器(摩擦式的),此外也可有其他制动措施 (如电气的或液压的)。
5.7.4.3
不应使用带式制动器,
5.7.4.4被制动作用的部件应与卷筒或驱动齿轮刚性连接。不应使用传动带或链条。
5.7.4.5制动器应能使装有L25倍额定载重量、以额定速度下行的吊笼停止运行。制动器也应能使 装有额定载重量、以限速器动作速度运行的吊笼停止。在任何条件下,吊笼的平均减速度都应不大 于lg。
5. 7. 4. 6制动器中产生制动作用力的任一弹簧,其制造和安装应满足:如果某一弹簧失效,载荷仍为额 定载重量时,制动器仍可有效地使吊笼减速。
5.7.4.7制动作用力应由压簧产生。压簧应被充分支撑,且其所受应力应不超过材料扭转弹性极限
的 80% Q
5.7.4.
正常作业时,应有持续的电流或液压压力来保持制动器的打开状态。
对于机-电式制动器,切断制动器电流应可由至少两个独立的电气装置单独实现,不论这些装置是 否会切断升降机的供电电流。
对于机-液式制动器,压力的中断应可由至少两个独立的阀单独实现,不论这些阀是否会切断升降 机液压系统的动力供应。
当升降机静止时,如果其中一个装置未能切断制动器的电流或液压油供应,则最迟到下一次运动方 向改变时,应防止升降机再运行。
5.7.4.9只要切断了对制动器的电流或液压油供应,制动器应无延迟地动作(制动线圈末端直接连接
二极管或电容器,不看作是延迟方法)。
5.7.4. 10
制动器应有表面磨损补偿调整措施o
5.7.4. 11
制动器的防护等级至少为IP23(GB 4208),
每个制动器都应可手动释放,且需由持续的作用力来维持释放状态O
5.7.5 对重
7.5. 1
7.5.2
7.5.3
吊笼不应用作另一吊笼的对重。
对重的上下两端应设有合适的滑靴或滚轮导向。
若对重使用填充物,应采取措施防止其窜动O
应标明所需对重的总质量,每个单独填充物上应标明其自重。
7.5.4对重应按GB 2893的规定涂成警告色。
7.5.5如果制造商允许升降机对重的下方有人可到达的空间,则对重应配备超速安全装置。
液压系统
5
5
5
5
5
5.
5.
5.
5.
1
2
3
4
5
应满足EN 982以及5. 8, 2〜5. 8.14的要求。
液压系统应满足5.7. 3. 3中的相关要求。
制动器应保持制动状态,直到泵达到正常工作压力且吊笼开始运动。
当驱动齿轮由液压马达驱动时,制动系统应可电控或液控释放。
每个泵或泵组都应配备溢流阀,并应符合下列要求:
-溢流阀在液压油路中应直接位于泵之后,且其型式和其连接旁路的布置,应不使其与整个液压 系统分离;
-溢流阀应在压力不大于提升额定载重量所需压力(满载压力)的140%时开启;
-溢流阀和旁路应有足够的能力,以保证在通过泵的最大额定流量时,溢流阀的开启压力不会增 高20%。为满足此要求,可使用两个或多个溢流阀;
-溢流阀的压力应可调,调节到正确压力后的位置应可固定封好。
«111
■ III
.6
.7
硬管的屈服强度应能承受2. 3倍的满载压力O计算壁厚的增加量应考虑为0.5 InlnO
软管及其接头的破断压力应至少为满载压力的4倍。
硬管和软管都应予以防护以免损坏,尤其是机械损坏。
在下行方向阀的回路中,应安装滤清器或类似装置。油缸应有排气装置。这些零部件的布置应
便于检查与维护。
5.8.10控制回路设计,应考虑避免在马达起泵的作用时造成的危险❹
5∙ 8. 11液压系统应能排尽液压油ɔ
5. 8. 12
5. 8. 13
油箱应能排除冷凝水。 油箱的液位应易于检查。
5.8. 14本标准中所提到的开关,可用具有相同安全性能的液压阀来代替。
5.9电气安装与电气设备
5.9.1 总则
电气安装和电气设备应符合GB 5226. 1的规定。
ItI
此外,对于电子器件,应考虑制造商规定的使用环境温度。当使用环境温度超岀GB 5226. 1的规 定温度时,应采取加热或散热措施O
控制系统相关安全部件的设计应符合表A. 1所列的电气装置,如5. 6. 3的超载检测装置。
5.9.2电气故障的防护
5.9.2. 1下列任何单一的升降机电气设备的故障,应不成为导致升降机产生危险故障的原因。
可能岀现的故障:
a) 失压和无电压;
b) 电压下降20%以上;
对地或金属构件的绝缘破坏;
d)
电气元件(如电阻器、电容器、晶体管、灯等)短路或断路以及参数或功能的改变;
e) 接触器或继电器的可动衔铁不吸合或不能完全吸合;
f) 接触器或继电器可动衔铁不分离;
g)
触点不能断开;
h)触点不能闭合。
5.9.2.2
对于符合5. 9. 7要求的安全触点,可不必考虑触点不能断开的情况。
5.9.2.3
在电源错相或断相的情况下,机器应不能启动。
5.9.2.4
如果方向控制装置的电源断相,机器应停止运动,或者应至少不达到限速器的动作速度。
5. 9. 2.5控制回路应采取措施避免当驱动电动机起发电作用时引起的危险。
5.9.2.6
电气安全装置的回路短路或由于与金属构件接触而造成短路,电气安全装置应立即停止机器
的运动。
只应由专业人员来使其恢复到正常工作状态。
5.9.3外界干扰防护
任何电气设备都应能防护外部的有害或危险影响及落物(如雨、雪、泥浆,灰尘等)。防护等级(见
GB 4208)应为:便携式控制装置不低于IP65;控制柜、开关、制动器的电气元件不低于IP53;电动机不低
于 IP44 O 5.9.4配线
升降机的所有电缆和配线的布位和安装,应能防护机械损伤。尤其要注意吊笼上悬挂的电缆的强 度和气候对其的影响。
为防止不正确的插接,所用的插头和插座应具有符合GB 5226. 1-2008中13. 4.5要求的机械编 码或等效标记。
5.9.5接触器、继电器
交流或直流电动机的主接触器的使用类别应不低于GB 14048. 4规定的AC-3或DC-3。
用作主接触器的继电器,控制交流电磁铁的使用类别应不低于GB 14048. 5规定的AC-15;控制直 流电磁铁的使用类别应不低于GB 14048. 5规定的DC-13o
在采取措施以满足5. 9. 2. 1的过程中,主接触器和继电器都应:
——只要有一个“常闭接触点”闭合,则所有“常开接触点"分离;且
——只要有一个“常开接触点”闭合,则所有“常闭接触点"分离。
5.9.6电气安全装置 5.9.6. 1附录A列出的任一电气安全装置动作时,应按照GB 5226. 1中0类的停机功能要求防止或 立即停止机器的运动。电气安全装置应包括:
——符合5. 9. 7要求的一个或多个安全触点,这些安全触点直接切断5.10. 6.1所述的接触器或其 继电器或5.10. 6. 2所述的电气装置的供电,或者
——一个安全回路,该安全回路是一个或多个安全触点串联的控制回路的一部分。
5.9.6.2正常作业时,任何电气设备都应不与电气安全触点并联。电动机启动时超载检测装置可 桥接。
5. 9. 6. 3电气安全装置的控制元件在连续正常作业时产生的机械应力下,应功能正常。用简单的方法 应不能使电气安全装置不起作用(用桥接件不算简单的方法)。
5.9.6.4安全装置开关的安装应符合GB/T 18831的要求。
5.9.7 安全触点
5.9.7. 1安全触点的动作,应有断路装置将其可靠地断开,即使两触点熔接在一起也应断开。
安全触点的设计应尽可能减少由于部件故障而引起的短路危险。
l≡]
注:当所有触点的断开元件处于断开位置时,并且在有效行程内动触点和施加驱动力的驱动机构之间无弹性元件 (如弹簧)施加作用力,即为触点得到了可靠断开。
5. 9. 7. 2安全触点应符合5. 9. 3的要求,并且其额定绝缘电压应至少为250 Vo
在交流电路中,安全触点应符合GB 14048. 5中的AC-15,在直流电路中应符合GB 14048. 5中的
DC-13 o
5. 9. 7.3电气安全触点在机器供电系统的作用效果应符合5.10. 6的要求。
如果由于动力传输的原因,继电接触器被用于控制机器时,应视为直接控制机器的动力供应以使机 器启动或停止。
5.9.
照明
只要升降机在工作中,吊笼内都应有照明。控制装置处的照明应不小于50 IXO
5. 10控制和限位装置 5. 10. 1 总则
所有的控制装置都应符合ISO 9355-IO
5.10.2行程限位开关 5.10.2.1上、下行程开关
应设置上、下行程开关。上、下行程开关应能使以额定速度运行的吊笼在接触到上、下极限开关前 自动停止。但不应以触发上行程开关作为最高层站停靠的通常操作。
5. 10. 2.2 上、下极限开关
5. 10.2. 2. 1在行程最上和最下端均应设置一个极限开关,其应能在吊笼与其他机械式停止装置(如缓 冲器)接触前切断动力供应,使吊笼停止O
5. 10.2.2.2
极限开关动作后,只有专业人员才能使吊笼恢复运动。
极限开关与行程开关不应共用一个触发元件。
极限开关应符合5. 9. 6的要求。
极限开关均应由吊笼或其相关部件的运动直接触发。
5. 10. 2.2.3
5. 10. 2.2.4
5. 10. 2.2.5 5. 10.3防松绳装置
钢丝绳式升降机和对重用的钢丝绳应设有防松绳装置,该装置应有符合5. 9. 6的松绳开关,并应能 中断吊笼的任何运动,直到经专业人员操作后才能恢复吊笼运动(见5.7. 3. 2. I)O 5. 10.4安装用附件
在升降机正常作业以及安装、拆卸和维护/检查作业期间,安装用附件的正确位置,应通过设计或符 合5. 9. 6的电气安全装置的核验来确定。安装用附件应包括导轨架提升设备、附墙架安装用延伸通
道等。
5. 10.5停机装置
停机装置应能使升降机(包括动力驱动的门)停机或保持在非工作状态。停机装置应设置在:
a)
地面防护围栏外;
b)
滑轮间(如果有。滑轮间指仅装设滑轮或限速器和电气设备的房间);
C)吊笼顶,如果吊笼顶可接近;
d) 安装/拆卸/维护/检查控制装置中;
e) 吊笼内。
a)和b)中的停机装置应符合GB/T 19670的要求并明确标出其功能。停机装置应包括符合5. 9. 6
要求的电气安全装置。
c)、d)、e)中的停机装置应是符合GB 16754的急停装置。
5. 10.6 停机
5. 10.6. 1由电气安全装置动作引发的停机应通过切断电动机的电力供应来实现,可由:
——电气安全装置本身来完成,或
tl
——触点都串联在电源回路中的两个独立的接触器来完成O
本标准没有包括接触器之外的其他停机装置的使用。如果能保证与本标准安全水平相同,也可使 用其他装置,见GB 7588和GB 2124Oo
5. 10. 6.2对液压式升降机,由电气安全装置动作引发的向下运动的停机,应通过切断下行方向阀实 现。可由电气安全装置本身或通过至少两个串联的独立电气装置来完成。
5. 10. 6. 3升降机停止时,如5.10. 6.1提到的任何一个接触器的主触点没有打开或5. 10. 6. 2提到的 任何一个电气装置没有断开,则最迟到下一次运动方向改变时,应防止吊笼再运行。
5. 10.7控制方式 5. 10. 7. 1正常作业
5. 10. 7. 1.1应可在吊笼内对升降机进行控制。也可在地面和层站进行控制。
5. 10.7. 1.2除了急停外,所有控制都应设计成只能由人工操作。
5. 10.7. 1. 3应有防止吊笼在其停止后2 S之内离开层站的装置。
5.10.7.2安装、拆卸和维护作业 5.10.7.2.1安装、拆卸和维护/检查的控制操作应只能在吊笼内或吊笼顶进行。允许在Llm之上的 侧面部分被拆除的吊笼内进行安装、拆卸和维护/检查作业,但这些部分重新封围的正确性应通过符合 5. 9. 6的电气安全装置的核验,以保证升降机的正常作业。
5. 10. 7.2. 2在安装、拆卸和维护/检查时,吊笼最大速度应不大于0.7 m∕s,并且除下列特殊情况外, 所有安全装置均应对吊笼的运行起保护作用:
——上极限开关和上行程开关可能不起作用,此时应采用自动越程保护措施,如用电气开关; ——层门开关回路可短接。
5.10. 7.2.3安装、拆卸和维护/检查作业应设有控制装置。该装置应包括:
——符合5. 9.6有关电气安全装置要求的维护/检查开关,该开关应是双稳态的,能锁住并且能不 受维护/检查控制位置以外的所有控制信号的干扰。只有通过维护/检查开关的操作,才能使 升降机恢复正常作业。
——止-动控制装置[只有当手动控制装置(致动机构)被驱使时,才能触发并保持具有危险性的机 器功能运行的控制装置],应设计成只能由人工操作开启,并且应清楚地标明运行方向。
——5.10.5的急停装置。
5. 11故障 5. 11. 1报警装置
为了便于吊笼内的人员寻求外部援助,应在吊笼内安装易于识别和接近的报警装置。
报警装置可以是响铃或类似装置,也可以是对讲系统,对讲系统应能在升降机断电后至少1 h内正 常工作。
5. 11.2紧急逃离
乘员应可通过5. 6.1. 5所描述的方法从吊笼内逃出。
5.11.3吊笼内被困人员的手动下降
如果吊笼内设有任何人都可操作的手动紧急下降设备,则应符合下列要求:
——传动系统的制动器应可在吊笼内用人工方法释放,维持制动器释放所需的力应不大于400 N5
——装置应予以保护以避免误用,例如使用在紧急情况下可被打破的保护盖;
Jn
——速度应可自动控制且应低于限速器的动作速度,但最大不大于1.0 m∕so
5.11.4专业人员的紧急操作 5. 11.4. 1 通则
未配备符合5.11. 3要求的手动紧急下降设备的升降机,应有仅供专业人员用的紧急操作措施,以 在紧急情况时能使吊笼移动到层站。
5. 11.4.2 人工紧急操作
5.11.4.2.1对于非液压驱动的
人工操作移动装有额定载重量的吊笼所需的力应不大于400 NO
只应由专业人员来操作。
5. 11.4.2.2 对于液压驱动的
升降机应设有人工操作阀,只能由持续的人工操作才能使该阀起作用,即使在动力供应中断时,也 能使吊笼下降。
对间接作用式升降机,当压力低于最低操作压力时,人工操作应不能使阀打开。
当吊笼设有超速安全装置或夹紧或棘爪装置时,只有将吊笼上升,才能使这些装置释放。应将手动 泵和溢流阀一起安装在单向阀或下行方向阀和截止阀之间的回路上,溢流阀能将压力限制在满载压力 的2. 3倍之内。
只应由专业人员来操作。
5. 11.4.3 电气紧急操作
在设有电气紧急操作的地方,应安装符合5. 9. 6要求的紧急操作开关。该开关只应由专业人员来 操作,以防止吊笼有该开关控制之外的所有其他运动。
紧急操作开关应允许通过止-动控制装置来控制吊笼的运动,止-动控制装置应只能由人为操作来 开启,并且设置在紧急操作开关附近。运动方向应清楚地标在上下按钮旁。
当吊笼被提升时,允许紧急操作开关直接失效或通过回路中的其他安全装置如限速器、超速安全装 置、缓冲器的电气安全装置以及极限开关和松绳开关失效。
紧急操作开关及其按钮的位置应合理,使用该开关时应能方便地观察到吊笼的运动。
吊笼速度应不大于0.7 m/s。
5. 12噪声 5. 12. 1总则
机器的设计和制造应考虑降低噪声(特别是降低声源噪声)的技术进步和有效方法,使其噪声发射
产生的风险降低到最低水平。噪声水平可参照类似机器的数据进行评定。
5.12.2在设计阶段减小噪声
设计机器时,应考虑ISO/TR 11688-1给出的控制声源噪声的信息和技术措施,也可考虑ISO/ TR 11688-2给出的信息。最大的噪声源是齿轮齿条传动装置。
5. 12.3噪声的测量方法
地面防护围栏(其外1. 00 m、离地高1. 60 m处)和吊笼内工作位置的发射声压级,应按
GB/T 17248.2 测量。
噪声测量的工作工况:无载荷。
噪声应按7-1.2.2的要求明示。
6 验证
6. 1设计验证
表9列出了制造商应按第5章的安全要求和措施对每类新型升降机进行验证的方法,同时提供了 相应的条款编号。表中列出的条款包含其所属的全部子条款,都应作为验证的依据。制造商应保存所 有的验证记录。
表9安全要求或措施的验证方法
|
相应条款 |
安全要求 |
目测a |
性能检査/试验I) |
测量C |
图样/计算书(I |
使用信息* |
|
5. 1 |
总则 |
7 |
7 |
7 |
7 | |
|
5.2 |
载荷组合及计算 | |||||
|
5.2.1 |
廿XUJ ⅛fl∏i |
V | ||||
|
5.2.2 |
结构计算 |
7 |
7 | |||
|
5. 2.3 |
安全系数 |
7 | ||||
|
5.2.4 |
载荷情况 |
V |
7 | |||
|
5. 2. 5 |
稳定性 |
7 |
V | |||
|
5.2.6 |
疲劳应力分析 |
7 |
7 | |||
|
5.3 |
底架 |
7 | ||||
|
5.3.1 |
设计 |
7 |
7 | |||
|
5. 3. 2 |
支撑装置 |
7 | ||||
|
5. 3. 3 |
可调支撑装置 |
7 |
7 |
7 | ||
|
5.4 |
导轨架、附墙架和缓冲器 J | |||||
|
5.4.1 |
导向结构和导轨架 | |||||
|
5.4. L 1 |
刚性导向 | |||||
|
5.4.1.2 |
设计 |
V | ||||
|
5.4.L3 |
导轨架连接 |
7 |
7 |
7 |
7 | |
|
5.4. 1.4 |
转动节点 |
V | ||||
|
5. 4. L 5 |
传动件 |
V |
V | |||
|
5.4.2 |
附墙架 |
~√~ |
7 |
7 | ||
|
5.4. 3 |
缓冲器 | |||||
|
5.4. 3.1 |
下部缓冲器 |
7 | ||||
|
5* 4. 3.2 |
减速度 |
7 | ||||
|
5.4. 3.3 |
液压缓冲器f |
J |
7 |
7 | ||
|
5.5 |
升降通道防护 | |||||
|
5.5.1 |
总则 |
7 | ||||
|
5.5.2 |
地面防护围栏 |
7 |
7 |
V | ||
|
5.5.3 |
层站入口 |
7 |
7 |
7 | ||
|
5. 5.4 |
材料 |
7 |
7 |
7 |
7 | |
|
5.5. 5 |
门锁f |
V |
7 |
7 | ||
|
5.5.6 |
间距 |
7 |
7 | |||
|
5.6 |
吊笼 | |||||
|
5.6.1 |
总则 |
7 |
7 |
7 |
V | |
|
5.6.2 |
吊笼防坠安全装置f |
7 |
7 |
7 |
7 |
7 |
表9 (续)
|
相应条款 |
安全要求 |
目测’ |
性能检查/试验b |
测量C |
图样/计算书d |
使用信息。 |
|
5. 6. 3 |
超载检测 |
√ |
V |
√ |
√ |
√ |
|
5.7 |
传动系统 |
-- --■--— - ^―—^― --— J | ||||
|
5. 7. 1 |
总则 |
√ |
V |
__ ■______________________ √ |
—≡-R | |
|
5.7.2 _____ ________________ . . ___ |
防护和可接近性 |
√ |
V |
√ | ||
|
5. 7,3 h__I.----- |
悬挂系统 |
√ |
7 |
√ |
√ | |
|
hh--B - -------- - - 1 B 5. 7. 4 |
制动系统 |
√ |
V |
√ |
√ |
√ |
|
5.7.5 |
对重 |
√ |
√ | |||
|
5.8 |
液压系统 |
√ |
V |
√ |
√ |
√ |
|
5.9 |
电气索统 | |||||
|
5. 9. 1 |
总则 |
√ |
√ |
√ | ||
|
5.9.2 |
~~■-≡-1 电气故障 |
√ |
7 |
√ |
√ | |
|
5.9.3 |
外部影响 |
√ |
√ | |||
|
5.9.4 |
配线 |
√ | ||||
|
5. 9.5 |
接触器、继电器 |
√ | ||||
|
5. 9. 6 |
电气安全装置 |
√ |
V |
√ | ||
|
5. 9.7 |
安全触点 |
√ | ||||
|
5.9.8 |
照明 |
√ |
'"""' ■ |
√ | ||
|
5.10 |
控制和限位装置 |
' UiI h .■・,■* ■ H ' I I | ||||
|
5.10. 1 |
总则 |
√ | ||||
|
5.10. 2 |
行程限位开关 |
√ : |
√ |
√ | ||
|
5.10. 3 |
防松绳装置 |
√ * |
√ |
√ | ||
|
5.10.4 |
安装用附件 |
√ i |
√ |
√ | ||
|
5.10.5 |
停机装置 |
√ |
√ | |||
|
5.10.6 |
停机 |
√ |
√ |
√ | ||
|
5.10. 7 |
控制方式 |
√ |
√ |
√ |
√ | |
|
5.11 |
故障 |
√ |
√ |
√ |
√ |
a目测用来验证零部件特征是否符合要求。
b性能检査/试验用来验证性能是否符合要求。
l≡
C测量是使用器具来验证是否符合限值要求。
d图样和计算书用来验证零部件的设计特征是否符合要求。
e使用信息用来验证相关要求是否在使用说明书中说明或作出标志。
f见6. 2中对一些重要部件的特别验证试验要求。
6.2特别验证试验
6.2. 1概述
下列部件应进行特别验证试验:
——层门和吊笼门的门锁装置;
——超速安全装置和限速器;
——线性蓄能型缓冲器和耗能型缓冲器;
——破断阀。
升降机制造商应作试验记录并保存。
6.2. 1. 1 总则
6.2. 1. 1. 1试验应由具备相应资质的试验机构或具备试验条件的升降机制造商、零部件制造商来 进行。
6.2. 1.1.2仪器的精度应在下列范围内:
——质量、力、距离、时间、速度 ±2%;
——加速度、减速度 士 4%;
——电压、电流 ±2%;
——温度 ±2 °C。
Ill
6.2. 1.2
试验报告内容
报告应至少包括以下内容:
——试验设备的名称;
——试验报告编号;
——类别、型式和产品名称(或商品名称);
—制造商名称和地址;
——试验日期;
——符合6. 2. 2. 1.3要求的文件;
——地点、时间、试验者姓名O
6.2.2吊笼和层门的门锁装置
6.2.2. 1 一般规定
6.2. 2. 1. 1
应用范围
EΞ a J
本程序适用于门锁装置。所有参与门的锁紧和检查锁紧状态的零部件均为门锁装置的组成部分。
6.2.2. 1.2试验目的
应按本试验程序检验门锁装置的结构和动作是否符合本标准。
6.2.2. 1.3相关文件
试验报告中应包括下列文件:
带动作说明的结构示意图,应清楚地表明所有与门锁装置的相关动作及其安全性细节,包括锁 紧元件的有效接合和电气安全装置的动作位置以及紧急开锁装置的动作;
——门锁装置的类型(AC和/或DC)及其额定电压和额定电流的说明。
6.2.2. 1.4 试验样品
应在样品上进行试验。
如果门锁装置的试验只能在其安装在相应的门(如有几块门板的滑动门或饺链门)上才能进行时, 则应按工作状况将门锁装置安装在一个完整的门上。在不影响试验效果的条件下,门的尺寸可比真实 门的尺寸小。
6. 2. 2. 2 检查和试验
|
6. 2.2.2. 1 |
动作检查 |
试验的目的是检验门锁装置的机械和电气元件是否能按安全要求正确动作,是否符合本标准的 要求。
特别应检验下列情况:
^在电气安全装置动作之前,锁紧元件至少有7 mm的接合长度(见5. 5.5. 3. 9);
——当门开着或未锁紧时,人在正常可接近的位置不能使升降机运行。
6.2.2.2.2 试验
试验目的是检验门锁装置的机械元件和电子元件的强度。
处于正常动作位置的门锁装置样品,应控制其按通常的使用情况进行动作。 门锁装置样品应按其制造商的常规要求进行润滑。
动作循环次数应由机械或电子计数器记录。
|
6. 2. 2.2. 2. 1 |
耐久试验 |
门锁装置应进行200 000次(±1 %)完整循环(一次循环包括一次开锁作业和一次重新锁紧作业)O 门锁装置的驱动应平滑无冲击。
耐久试验中,电气安全开关应和锁一起按正常工作状态进行机械动作O
6. 2. 2. 2. 2. 2 静态试验
试验应在1 kN的静力作用下进行,且总的持续时间应不小于5 mino
该力应作用在门打开的方向,且尽量接近使用者试图打开门时力所作用的位置。
6.2.2.2.2.3 试验准则
耐久试验(6. 2. 2. 2.2.1)和静态试验(6. 2. 2. 2. 2. 2)后,不应出现任何影响安全性的磨损、变形或 损坏。
6. 2.3超速安全装置和限速器
6. 2. 3. 1 一般规定
利用正常工作工况时使用的悬挂和导向系统进行试验,超速安全装置应与其限速器联合起来一起 进行试验。也可采用经验证的其他方法进行试验。
制造商应标明试验载荷的质量(kg)和额定速度(m/s) O如果超速安全装置要在不同的载重质量和
速度下进行验证,应详细说明O
6.2.3.2 试验方法
6.2.3.2. 1应对每类新型的超速安全装置及其相应的限速器的典型结合进行试验,坠落试验的基本载
荷为所有与吊笼一起运行的质量的总和。
6.2.3.2.2试验应在制造商规定的限速器动作速度下进行。
6.2.3.2.3试验次数应不少于30次。可选择下列规定之一进行试验:
a)按传动装置是否运行进行试验:
•额定载重量至少试验10次,传动装置运行;
吊笼空载至少试验5次,传动装置运行;
1. 3倍额定载重量至少试验5次,传动装置运行;
额定载重量至少试验5次,传动装置不运行,制动器打开;
1. 3倍额定载重量至少试验5次,传动装置不运行,制动器打开。
在吊笼自由下落(制动器打开)的情况下进行试验:
额定载重量时至少试验15次;
吊笼空载时至少试验5次;
b)
L 3倍额定载重量时至少试验10次。
6. 2. 3. 2. 4直接或间接测量应包括:
下落总高度;
制动距离;
动作速度;
以时间为函数的减速度。
a)
b)
C)
d)
6.2. 3. 2.5应对下列内容进行检査:
制动距离和/或减速度符合5. 6.2.2;
最大动作速度符合5.6.2.11;
无裂纹和变形;
由钢丝绳驱动的限速器,限速器动作时作用在钢丝绳上张力符合5. 6. 2.14o
a)
b)
C)
d)
6.2. 3.3试验报告
报告应载明:
a) 6. 2. 1. 2规定的内容;
b)
超速安全装置和限速器的型式和适用性;
C)升降机的类型和型式;
d)包括惯性效应在内,超速安全装置制停的总载荷;
e)限速器动作速度;
f)
为使超速安全装置在导轨上工作,导轨的许用厚度、夹紧面的最小宽度、导轨润滑情况以及导
轨表面情况;
g)由钢丝绳驱动的限速器,其钢丝绳的直径、结构、限速器触发时作用在钢丝绳上的张力,如有
牵引滑轮,则是最小张力。
6.2.4线性蓄能型缓冲器和耗能型缓冲器
缓冲器的特别型式验证试验,应按GB 7588—2003中F5的型式检验试验程序进行。
6.2.5破断阀
破断阀的特别验证试验,应按GB 7588—2003中F7的型式检验试验程序进行。
6.3在第一次使用之前对每台机器的验证试验
制造商应对升降机进行静载试验和动载试验,以保证升降机正确制造和装配,核验所提供的全部装 置都是齐备的并能正确动作。这些试验可在制造商处或其授权代理商处或使用地点进行。
下列需要特别验证:
所有限位开关的正确功能;
所有控制器的正确功能;
在规定限值内超速安全装置的功能;
在1〜1.1倍的额定载重量下超载检测装置的动作;
在规定限值内制动系统的制动距离; 门锁装置的正确功能;
1. 25倍的额定载重量的动载试验;
GB 5226. 2规定的电气试验;
由制造商或其授权代理商提供的有静态和动态试验详细内容的试验报告。
7使用信息
7. 1使用说明书
7. 1. 1总体要求
每台升降机都应随机提供使用说明书。使用说明书应符合GB/T 15706. 2—2007中6.5的要求。
7. L 2使用说明书内容
制造商和/或进口商/供应商提供给用户的使用说明书,应至少包括7∙ 1. 2.1〜7.1. 2. 10的内容。
7. 1.2. 1 —般信息
应提供以下信息:
——制造商或供应商的名称和地址;
生产的国家;
型式;
出厂编号;
反复说明机器上的安全标志、警示符号及其含义;
升降机安装用的所有相关零部件(导轨架节、层门、附墙架、控制系统等);
使用说明的内容不仅应包括机器的预定使用,还应考虑到任何合理的可预见的误用。
7. 1.2.2 性能和设计信息
应提供以下信息:
额定载重量(正常作业工况、安装/拆卸工况);
额定速度(正常作业工况、安装/拆卸/维护工况);
工作状态和非工作状态下的最大允许独立高度;
导轨架无附着的最大提升高度;
导轨架有附着的最大提升高度;
附着间距;
导轨架顶端自由高度;
安装和拆卸时的最大允许风速;
工作状态下的最大允许风速;
非工作状态下的最大允许风速;对不同的风区,附墙间距等变化应清楚标明;
环境限制,如温度范围;
HI
无论是实际值还是根据对以往机器的测量而确定的值,均应对机器的噪声发射作如下明示: •吊笼内工作位置的A-计权声压级;
•地面防护围栏外1. OO m、离地高1. 60 m处最大的A-计权声压级及其测量位置;
•说明试验时的测量方法和工作工况;
•给出符合GB/T 14574要求的双值噪声发射标示值表示形式的不确定度K值。 注:有关销售的印刷品中也应给出噪声的信息。
使用说明书提供的信息应充分完整,以使使用者能获得每次安装的特别细节。
7. 1.2.3尺寸和质量
应提供以下信息:
吊笼在底部时,地面到吊笼底板的高度;
吊笼内部空间尺寸(长X宽X高); 导轨架节尺寸;
导轨架节质量,单位为千克(kg);
基本单元(底架、最低的基础节、吊笼和驱动系统)的尺寸和质量;
安装所需的最小面积。
7. 1.2.4动力供应参数
7. 1.2.4. 1 电力驱动
应给出下列参数:
——驱动系统功率,单位为千瓦(kW);
——供电电压/频率,单位为伏特/赫兹(V/Hz) 5
——控制电压/频率,单位为伏特/赫兹(V/Hz);
——最大启动电流,单位为安培(A);
——最大消耗功率,单位为千瓦(kW);
——最小供电容量,单位为千伏安(kVA);
——主电源熔断器和型式,单位为安培(A) 3
——便携式工具插口的电压和电流,单位为伏特/安培(V∕A) O
7. 1.2. 4. 2 液压驱动
应给出下列参数:
液压压力,单位为兆帕(MPa); 电动机功率,单位为千瓦(kW) O
7. 1.2.5安全装置
应给出下列信息:
-安全装置类别(如超速安全装置、行程和极限开关、层门开关);
——安装、拆卸和维护/检查用其他安全装置;
——紧急下降装置的配置。
7. 1.2.6
其他技术信息
应给出下列参数或信息:
导轨架节连接螺栓(直径、性能等级、拧紧力矩、更换标准、预应力高强度螺栓使用的可能 限制);
升降机的功能配置使地基基础承受的压力;
在给定风区内,附墙架的配置和作用在支撑结构物上的力; 由装载和卸载产生的作用在层站上的力; 升降机周围需要防护的危险区域;
----每个提升位置的信息;
钢丝绳参数;
对能明显增加迎风面积的任何细节的考虑;
对能明显增加风速的任何情况的考虑,如邻近高大建筑物;
设备运输的程序;
对于提升附件,应给岀预定使用、使用限制、安装说明、使用和维护、静态试验所用系数等信息。
7. 1.2.7安装和拆卸说明
使用说明书应明确说明制造商预定的安装升降机的各种配置。需要非标准配置时,制造商、所有者 和使用者应达成协议,该协议应作为使用说明书的补充。
7. 1.2.7. 1 间距
7. 1.2.7. 1. 1升降机周围的间距
升降机周围的间距应符合下列要求:
——如果任一通道与任一接近其的升降机运动部件之间的安全距离小于0. 85 m(额定速度不大于 O. 7 m/s时,为小于0. 5 m),则升降通道的防护装置应符合GB 23821—2009表4的要求且高 度不小于2. O m,或者为地板到天花板的全高度,此时可小于2 Ino
——如果安全距离不小于0. 85 m(额定速度不大于0. 7 m/s时,为不小于0.5 m),则应配备高度不 小于L 1 Tn的固定防护装置(有扶手、中间横杆和护脚板)。
7. 1.2. 7. 1.2吊笼上方的间距
为预防吊笼在升降通道的顶端超出行程限度,应有充分的导向高度作为越程余量。越程余量应为:
——对于对重质量大于空吊笼质量的升降机: ≥2 m;
——对于钢丝绳式或对重质量不大于空吊笼质量的升降机:≥O.5∏u
——对于齿轮齿条式和间接液压式升降机: ≥O. 15 m;
——对于直接液压式升降机: >0.1 mo
越程余量应从上极限开关的动作触点算起;对于带对重的升降机,越程余量应从对重与其缓冲器的 接触点算起。
如果额定速度大于0. 85 ɪn/s,越程余量应增加0. 1√ (m),其中V为额定速度(m∕s) O
当吊笼运行到达越程余量终点时,其上还应有至少1. 8 m(如吊笼顶部不允许上人,则应有至少 O. 3 m)的自由距离。此外,吊笼上任何高过吊笼的部件和设备,其上方应有至少0.3 m的自由距离。
7. 1.2.7. 1.3对重上方的间距
当吊笼停在充分压缩的缓冲器上时,对重上方的自由距离应至少为0. 3 mo
7. 1.2. 7. 2 基础
应给出能承受所有载荷的升降机用场地的信息。支承底架和导轨架的基础,应能承受5. 2描述的 力和力矩。
如升降机底部的下方有可接近的空间,则任何对重都应有防坠安全装置。
7. 1.2. 7. 3 安装和拆卸
只有专业人员才能安装和拆卸升降机。
只应由专业人员来进行升降机的供电连接。
使用说明书应至少包括:
——推荐使用的剩余电流保护器;
——往工地的运输;
--升降机的额定安装载重量和额定安装速度5
——导轨架节和附墙架的安装,包括螺栓(直径、性能等级、拧紧力矩)的正确使用信息;
——提升较重部件的建议方法;
——地面防护围栏和层门的安装和安全要求,包括每个入口位置都应有的升降通道防护装置;
——层站照明(说明应包括:如使用升降机时照明不足,则应提供充足的工地照明,照亮升降机全运 行高度上的层站);
——整机试验。试验应至少包括以下要求:
•升降机的核对检査;
•功能试验:
♦驱动系统和制动;
♦行程限位孑
♦吊笼和层门;
♦超载检测装置;
♦间距;
♦升降机应在吊笼装有制造商规定的额定载重量下进行全行程的动态试验;
♦吊笼防坠安全装置应进行制造商规定的动态试验。
——拆卸程序。
7. 1.2. 8操作及使用说明
使用说明书中应有单独的章节,向用户提供安全操作和操作人员培训的最低要求的明确信息。升 降机的装载、卸载和操作可由任何被允许进入工地的人员进行操作,除非国家法规另有规定。
详细使用说明应包括:
预定用途;
层站和吊笼门的操作;
吊笼的装载以及对装载位置、载荷集中堆放和载荷固定的限制;
推行带小脚轮的物品器具进出吊笼时合适的间隙;
正常作业工况时吊笼顶应无载荷;
吊笼内、底部防护围栏和层站中可使用的控制装置的功能;
环境条件,如工作状态最大风速O
7. 1.2.9故障程序
使用说明书中应有单独的章节,向专业人员提供紧急操作的全部必要信息,如:
—特殊控制;
——安全装置,如限位开关、超速安全装置;
——故障的应对;
——电路图;
——吊笼入口附近的信息(见5. 6. 1.4.1.9和5. 6. 1.5. 6) O
7.1.2.10定期检查和维护
使用说明书中应说明按制造商要求、作业工况和使用频率而确定的定期检査、试验和维护的频次,
并应给出检查细目和合理使用的详细信息。
如未随机器提供运行记录本,则还应在使用说明书中说明运行记录内容。
使用说明书中还应说明易损件及其更换标准,如GB/T 5972有关钢丝绳的更换。使用说明书应有
关于彻底检查疲劳寿命(见5. 2. 6. 1)的章节。
7.2 标志
制造商应将标有7. 2. 1〜7. 2. 7内容的标牌或标志固定在升降机相应的明显部位,标牌或标志应持
2007中6.4的要求。
久耐用。标牌或标志的内容还应符合GB/T 15706.2
7.2. 1标牌
应有下列信息:
——制造商或授权代理商的名称、地址;
--型式;
--出厂编号;
——生产日期;
——额定载重量(正常作业工况、安装/拆卸工况),单位为千克(kg);
——提升高度亍
——钢丝绳参数;
——基本单元的质量,单位为千克(kg);
一^额定速度(正常作业工况、安装/拆卸/维护工况)。
7. 2.2导轨架节或导轨节的识别标志
每个导轨架节或导轨节上都应有可识别其生产日期的标志或序号。
7. 2.3基本使用信息标牌
应有下列信息:
导轨架高度;
导轨架顶端自由高度;
导轨架节连接螺栓(螺栓直径、性能等级、拧紧力矩);
电力供应(包括剩余电流保护器的参数);
独立时(无附着时)的操作; 安全距离;
附墙架示意图,包括附墙间距;
非工作状态下吊笼的位置;
操作说明书的查看; 对重位于易接近空间的上方时,安装的警示信息。
7.2.4
吊笼内的标牌
应有符合下列规定的字符高度和信息:
~ 字符最小高度:25 mm;
LTJ
——正常作业工况的额定载重量和最大乘员数;
——对载荷位置和集中堆放的限制O
7.2.5地面防护围栏出入口外的标牌
应有下列内容:
——非经许可严禁入内。
7.2.6超速装置标牌
应有下列信息:
--制造商名称和地址;
-一型式检验证书编号;
——动作速度3
——生产日期和出厂编号。
7.2.7驱动电动机标牌
应有下列信息:
——制造商名称和地址; ——生产日期和出厂编号。
7. 3控制元件标志
所有的控制元件都应清楚地标志。推荐使用图形符号。
相应条款
5. 5. 5.1
5. 5. 5. 2
5.6.L4∙L5
5.6∙L5
5* 6. 2. 3
5. 6. 3. 3
5.7∙3∙2.L2
5.10.2.2
5. 10,3
5.10.3
5∙10∙4
5* 10.5
5. 10, 7. 2.1
5.10. 7. 2.3
5.11,4.3
附录A
(规范性咐录) 电气安全装置
表A. 1电气安全装置表
装置核查
层门的关闭位置
层门锁的关闭位置
i⅛÷
吊笼门的关闭位置
活板门或紧急出口门的锁闭位置
超速安全装置动作
超载检测装置
* -≠-> I
提升钢丝绳异常伸长
极限开关
提升钢丝绳松绳
对重悬挂钢丝绳松绳
安装用附件
停机装置
吊笼重新封围的接合位置
维护/检查开关
电气紧急操作开关
GB/T 16855. 1—2008中的性能等级

d
b
d
b
b
C
d
d
d
参考文献
Ll] GB 50429铝合金结构设计规范
[2] ISO/TR 11688-2:1998 ACOUStiCS一ReCOmmended PraCtiCe for the design Of low-noise machinery and equipment一Part 2 introduction to the PhySiCS Of low-noise design
[3] ISO 16368 :2003 MObiIe elevating WOrk PIatfOrmS design CalCUlatiOnSJ Safety requirements and test InethOdS
[4] ISO 16369:2007 EIeVating WOrk PIatformS—Mast—Climbing WOrk PIatfOrlnS
[5] EN 81-3: 2000 Safety rules for the COnStrUCtion and installation Of IiftS—Part 3: EleCtriC and hydraulic SerViCe IiftS
[6] EN 1570:1999 Safety requirements for Iifting tables
[7] EN 12158-1 :2000 BUilderS hoists for goods一Part 1:HOiStS With accessible PIatfornIS
[8] EN 12158-2: 2000 BUiIderS hoists for goods—Part 2 ∙ Inclined hoists With non-accessible IOad Carrying devices
中华人民共和国 国家标准
吊笼有垂直导向的人货两用施工升降机
GB 26557—2011
中国标准出版社出版发行 北京复兴门外三里河北街16号 邮政编码= 100045
网址 WWW. spc< net. Cn 电话 ≡68523946 68517548
中国标准出版社秦皇岛印刷厂印刷
各地新华书店经销
开本880X1230 1/16 印张3.25 字数99千字
2011年10月第一版 2011年10月第一次印刷
*

书号:155066 • 1-43443
如有印装差错由本社发行中心调换 版权专有侵权必究 举报电话:(010)68533533
fl X代表5・2. 2所属子条款编号■如对于载荷情况∏ b(吊笼正常装载:吊笼)应计算5. 2. 2. 2、5. 2. 2. 6和
2. 2.12. 3.1规定力和载荷。表中简化为(2).(6).(12. 3. 1) O
见表4和表5。
C如吊笼由伸缩连杆机构引导,则连杆机构的静载荷应乘以5. 2. 2. 7的冲击系数。
5.2.5稳定性
在安装和使用过程中,升降机处于独立状态时,应采用表7给岀的载荷情况和安全系数按公式(5)