A
ICS 43.040.20
T 38
GB 4785-2019
代替 GB 4785—2007
PreSCriPtiOn for installation Of the external Iighting and Iight-Signaning devices for motor VehkIeS and their trailers
2019-12-17 发布
2020-07-01 实施
附录A (规范性附录)确定近光光束在垂直方向上变化的各种装载状况
附录B (资料性附录) 灯具的面、基准轴和基准中心、几何可见度角的示例
附录F (规范性附录)前照灯近光和前雾灯明暗截至线垂直向下倾斜度调整指示
本标准的全部技术内容为强制性。
本标准按照GB/T 1.1-2009给岀的规则起草。
本标准代替GB 4785-2007《汽车及挂车外部照明和光信号装置的安装规定》,与GB 4785-2007 相比,除编辑性修改外主要技术变化如下:
——删除了各种灯具几何可见度的图示(见2007年版的图1、图2、图5〜图18);
——删除了“试验方法”(见2007年版的第5章);
——删除了“等效灯”相关定义(见2007年版的3.5.1);
——考虑到光源的发展,补充和完善了光源及其相关的定义和要求(见3.7);
——增加了“互存灯系统”的相关定义和规定(见3.9.26);
——增加了慢行灯、角灯、醒目标志、追尾警告信号和自适应前照明系统及其相关内容的定义和规 定(见 3.9.29、5.25,3.9.24、5.20,3.9.15、5.21,3.9.30、5.26,3.9.25、5.22);
——透光面、发光面、视表面等定义与GB 4785—2007存在差异,增加了相应图示(见3.10、3.11、 3.12、附录 B);
——增加了配备昼间行驶灯的车辆应同时配备近光灯自动开启/关闭功能;或昼间行驶灯开启时至
,少开启后位灯;或采取相应措施,提醒驾驶员,在昼间行驶灯开启时,后位灯等信号灯没有开启 (见 5.2.7.6);
——增加了前照明系统相关路试的规定和试验方法(见5.1.9.3.3,5.22.9.2.4);
——增加了车辆在静止状态下允许开启本标准中未定义的灯具,并增加了相应的开启条件(见 4.31)。
本标准技术内容参考了欧洲经济委员会ECE R48《关于在照明和光信号装置安装方面对机动车辆 进行认证的统一规定》06系及其第1至第6增补件。
本标准由中华人民共和国工业和信息化部提岀并归口。
本标准起草单位:上海机动车检测认证技术研究中心有限公司、中国汽车技术研究中心有限公司、 长春汽车检测中心、襄阳达安汽车检测中心、上海小糸车灯有限公司、海拉(上海)管理有限公司、上汽大 众汽车有限公司、泛亚汽车技术中心有限公司。
本标准主要起草人:卜伟理、赵斌、何云堂、姜兆庆、武华堂、王颖欣、杨之文、郑志军、吴文芳、张舒。
本标准所代替标准的历次版本发布情况为:
——GB 4785—1984、GB 4785—1998、GB 4785—2007。
1范围
本标准规定了汽车及挂车的外部照明和光信号装置安装的一般要求、特殊规定和检验规则等。
本标准适用于M、N和O类汽车及挂车等。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 3977颜色的表示方法
GB 4094汽车操纵件、指示器及信号装置的标志
GB 4599汽车用灯丝灯泡前照灯
GB 4660机动车用前雾灯配光性能
GB 5920汽车及挂车前位灯、后位灯、示廓灯和制动灯配光性能
GB 11554机动车和挂车用后雾灯配光性能
GB 11564机动车回复反射器
GB 12676商用车辆和挂车制动系统技术要求及试验方法
GB 15235汽车及挂车倒车灯配光性能
GB 15766.1道路机动车辆灯泡尺寸、光电性能要求
GB 17509汽车及挂车转向信号灯配光性能
GB 18099机动车及挂车侧标志灯配光性能
GB 18408汽车及挂车后牌照板照明装置配光性能
GB 18409汽车驻车灯配光性能
GB 21259汽车用气体放电光源前照灯
GB/T 21260汽车用前照灯清洗器
GB 21670乘用车制动系统技术要求及试验方法
GB 23254货车及挂车车身反光标识
GB 23255汽车昼间行驶灯配光性能
GB 25990车辆尾部标志板
GB 25991汽车用LED前照灯
GB/T 30036—2013汽车用自适应前照明系统
GB/T 30511汽车用角灯配光性能
ECE R37关于批准用于已经批准的机动车和挂车灯具中的灯丝灯泡的统一规定(UnIfOrm ProVl-SiOnS COnCernmg the approval of filament IamPS for USe in approved IamP UnitS of POWer-drVen vehicles and of their traiIerS)
3术语和定义
下列术语和定义适用于本文件。
3.1
型式检验type test
就外部照明和光信号装置的安装数量和方式对某一车型进行型式试验。
3 . 2
照明和光信号装置安装相关的车辆型式Vehide type With regard to the installation Oflighting and
Iight-SignaIIing devkes
下述内容不存在差异的车辆,即认为是同一车辆型式:
——车辆的外形及尺寸;
--装置的安装数量和位置;
——前照灯调光装置;
悬挂系统。
可视作同一型式的情况:对于某些车辆与上述有所差异,但其差异并不改变车辆安装灯具的种类、 数量、位置、几何可见度和近光光束的倾斜度以及选装灯具的安装与否。
3 . 3
横截面 transverse Plane
与车辆纵向对称平面正交的竖直面。
3 . 4
空载车辆 UnIaden Vehide
无驾驶员、乘务员、乘客和载荷,但带有充足的燃料、备用车胎和常用工具的车辆。
3 . 5
装载车辆Iaden VehiCk
装载制造商技术上允许最大质量的车辆,其装载状况分布在车轴上。
注:各种装载状况参见附录Λo
3.6
照明和光信号装置 iighting and iight-Signamng device
用于实现一项或多项功能的单元、单元组或安装单元。
3 . 6 . 1
照明功能 iighting function
照亮车辆行驶道路或行驶方向上的物体。
3 . 6 . 2
光信号功能 Iight-SignaiiingfUnCtiOn
向其他道路使用者发岀或反射光信号,表明车辆存在或运动状态的改变。
3.7
光源 Iight SOUrCe ■
一个或几个发光体,可由一个或几个灯罩以及一个用于机械和电路连接的灯头组成。
3 . 7 . 1
可更换光源 replaceable Iight SOUrCe
不用工具就能插入灯座和从灯座上取岀的光源O
3.7.2
不可更换光源 non-repɪaeeabɪe light SOUrCe
固定在光源模块或照明单元中,只能随光源模块或照明单元进行整体更换的光源。
3 . 7 . 3
光源模块 iight SOUrCe module
一个装置的专用光学部件,包含一个或几个不可更换光源。其可带有符合可更换光源要求的灯座。
3 . 7 . 4
灯丝灯泡光源fikment iight SOUrCe
灯丝灯泡
通过灯丝本身发热发光的光源。
3 . 7 . 5
气体放电光源 gas-discharge iight SOUrCe
通过电弧放电发光的光源。
3.7.6
发光二极管 iight-emitting diode; LED
一种由半导体材料制成的固体光源。
3 . 7 . 7
发光二极管模块 LED module
LED模块
只包含LED光源的光源模块。可带有符合可更换光源要求的灯座。
3. 7. 8
目标光通量 Objectiveluminousns
在光源标准数据页中规定的光通量值,不包括公差。
注 1:光源标准包括 GB 15766.1、ECER37、ECE R99、ECERl28 等。
注2:对于不符合ECE Rl28要求的LED模块,该LED模块的目标光通量值在LED模块技术文件中标明。
3. 8
电光源控制器 ekctronic iight SOUrCe control gear
在电源和光源之间控制光源电压和/或电流的一个或几个部件。
3. 8. 1
镇流器ballaSt
在电源和光源(允许整合入光源或灯具中)之间稳定气体放电光源电流的一种电子光源控制装置。
3. 8. 2
启辉器ignitor
用于点燃气体放电光源电弧的一种电子光源控制装置。
3. 8. 3
可变光强控制器 variable intenSity control
一种装置,可自动控制可变光强光信号装置,使其发岀稳定且可识别的光信号。
注:可变光强控制器可以是灯具的一部分,或车辆的一部分,或独立于上述灯具和车辆。
3. 9
灯具lamp
用于照明道路或向其他使用道路者发岀光信号的装置。
注:牌照灯和回复反射器也属于灯具。
3.9.1
独立灯 independent lamps
在基准轴线方向上,具有分开的视表面、分开的光源和分开的灯体的装置。
注:对于牌照灯和第5、6类转向信号灯,本定义中的视表面替换为透光面。
3 . 9 . 2
组合灯 grouped IamPS
在基准轴线方向上,具有分开的视表面、分开的光源和共同的灯体的装置。
注:对于牌照灯和第5、6类转向信号灯,本定义中的视表面替换为透光面。
3 . 9 . 3
复合灯 COmbined IamPS
在基准轴线方向上,具有分开的视表面、共同的光源和共同的灯体的装置。
注:对于牌照灯和第5、6类转向信号灯,本定义中的视表面替换为透光面。
3 . 9 . 4
混合灯 reciprocally incorporated IamPS
在基准轴线方向上,具有分开的光源或在不同情况下工作的单一光源(如光学的、机械的、电气的差 异),全部或部分共有视表面和共同的灯体的装置。
注,对于牌照灯和第5、6类转向信号灯,本定义中的视表面替换为透光面。
3 . 9 . 5
单功能灯 Singk-function IamP
装置上产生单一照明或光信号功能的相关部分。
3.9.6
可藏灯 COnCealable IamP
不使用时,可以通过移动罩盖,或灯,或采用其他适当的方法,部分或全部隐藏起来的灯具。
3 . 9 . 7
远光灯 driving-beam headlamp ; main-beam headlamp
用于车辆前方远距离道路照明的灯具。
3 . 9 . 8
近光灯 PaSSing-beam headlamp ; dipped-beam headlamp
用于车辆前方道路照明,对来车驾驶员和其他使用道路者不造成眩目或不舒适感的灯具。
3 . 9 . 8. 1
主近光 PrinCiPaI PaSSmg-beam;PrinCiPaI dipped-beam
近光光束,但不包括红外(IR)发射器和/或弯道照明附加光源提供的光束。
3 . 9 . 9
转向信号灯 direCtiOn-indicatorlamp
转向灯
用于向其他使用道路者表明车辆将向右或向左转向的灯具。
注:转向信号灯也可作为车辆警告系统的一部分。
3 . 9 . 10
制动灯Stop lamp
向车辆后方其他使用道路者表明车辆正在制动的灯具。
3 . 9 . 11
后牌照板照明装置 rear-regSStratiOn plate illuminating devCe
牌照灯
用于照明后牌照板空间区域的装置,该装置可由几个光学元件组成。
3.9.12
前位灯 front POSitiOn lamp
从车辆前方观察,表明车辆存在和宽度的灯具。
3 . 9 . 13
后位灯 rear POSitiOn lamp
从车辆后方观察,表明车辆存在和宽度的灯具。
3 . 9 . 14
回复反射器retro-reflector
通过反射外来光源照射的光,向位于光源附近的观察者表明车辆存在的装置。
3 . 9 . 15
醒目标志 COnSPiCUity marking
为增强车辆的可识别性而安装或粘贴在车身表面的反光材料的组合,从车辆侧面或后方(对于挂 车,还包括从前方)观察时,提高车辆可识别性的装置。
3.9.16
危险警告信号 hazard Waniing sgnal
同时打开车辆上所有的转向信号灯,以向其他使用道路者表明,车辆暂时具有某种特殊危险。
3 . 9 . 17
前雾灯 front fOg lamp
用于改善在雾天或类似低能见度情况下车辆前方道路照明的灯具。
3 . 9 . 18
后雾灯 rear fOg lamp
在雾天或类似低能见度情况下,从车辆后方观察,使得车辆更为易见的灯具。
3 . 9 . 19
倒车灯 reverSing IamP
用于照明车辆后方道路和警告其他使用道路者,车辆正在或即将倒车的灯具。
3.9.20
驻车灯 Parkmg IamP
在车辆驻车状态时开启,用于引起人们注意,在某区域内有一静止车辆存在的灯具。
3 . 9 . 21
示廓灯 end-Outiine marker IamP
安装位置尽可能靠近车辆外缘和车顶位置,用来表明车宽的灯具。
注:对于某些车辆和挂车,示廓灯用来补充前、后位灯,以引起对其整体的特别关注。
3 . 9 . 22
侧标志灯 Side marker IamP
从车辆侧面观察时,表明车辆存在的灯具。
3 . 9 . 23
昼间行驶灯 daytime running IamP
昼间行驶时,使得车辆更为易见的一种面向前方的灯具。
3.9.24
角灯 COrnering IamP
为车辆即将转向的近前方道路转角处提供辅助照明的灯具。
3.9.25
自适应前照明系统 adaptive front lighting SyStem;AFS
一种前照明装置,提供具有不同特性的光束,用来自动适应近光灯和远光灯(若适用)的各种使用 条件。
3 29 225 21
照明单元IightingImit
用于提供一个或多个AFS照明功能或作为其一部分的发光组件。
3 29 225 22
安装单元 installation UnU
包含一个或多个照明单元的不可拆分壳体(灯体)。
3 29 225 23
照明模式Iighting mode
AFS的一种前照明功能模式状态,其由制造商规定,用于适应车辆和环境条件。
3 29 225 24
系统控制器SyStem control
AFS中用于接受AFS控制信号,并自动操作控制照明单元的部件。
3.9.25.5
AFS 控制信号 AFS control SignaI
向系统输入的AFS各模式的控制信号(V、E、W、T),或者向系统输入的任何附加控制信号,或者从 系统输岀至车辆的控制信号。
3.9.25.6
中性状态neutral State
AFS中的C级近光(基础近光)模式或远光模式,此时系统中无AFS控制信号。
3.9.25.7
自适应远光adaptve main-beam 零
AFS的远光光束,根据来车或前方车辆调整光束模式,来提高较远范围内驾驶员的可见度,而不对 其他道路使用者产生不舒适、眩目或分散其注意力。
3.9.26
互存灯系统 interdependent lamp SyStem
“Y”型灯系统
两个或三个具有相同功能、相互依存的灯具组合。
3 . 9 . 26 . 1
互存灯 interdependent lamp
“Y”型灯
互存灯系统的一部分装置,各互存灯同时点亮、具有基准轴线方向上分开的视表面和分开的灯体, 也可以具有分开的光源。
3 . 9 . 27
紧急制动信号 emergency Stop SignaI
向车后的其他使用道路者发岀的车辆正在实施高减速度的紧急制动减速的警示信号。
3 . 9 . 28
牵引杆挂车标志灯 marker lamp for draw-bar-trailer
安装在牵引杆挂车前部,前白后红的标志灯,用来辅助其他信号灯,表明车辆存在的灯具。
3.9.29
慢行灯 manoeuvring lamp
车辆慢行时,为车辆侧方提供辅助照明的灯具。
3.9.30
追尾警告信号 rear-end coliision alert SignaI ; RECAS
由前车向后车发岀的一种自动信号。用以警告后车辆采取紧急行动以避免碰撞。
3 . 9 . 31
“D"型灯 IamPS marked “D"
允许单独使用,或将两个灯作为一个总成看作一个“单灯”使用,分别进行型式试验的独立灯。
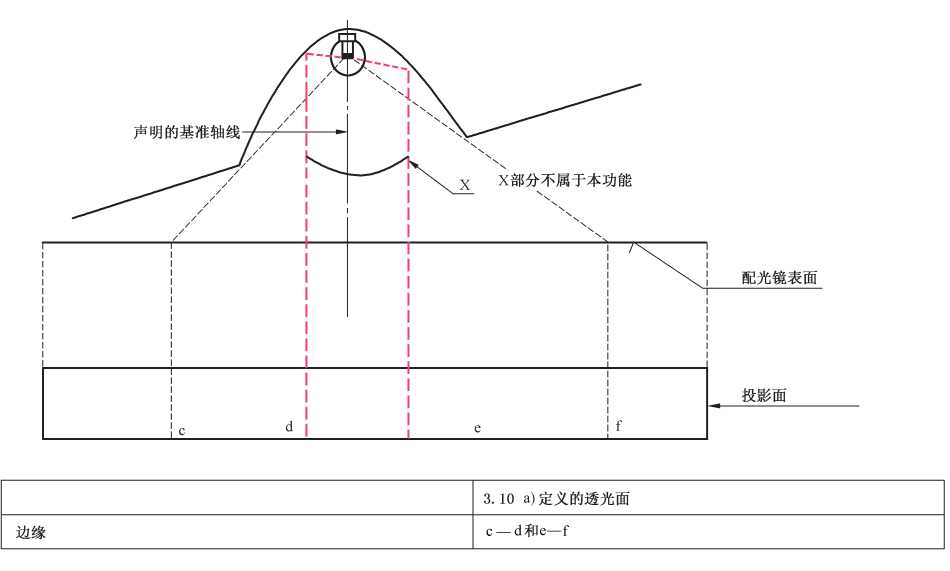
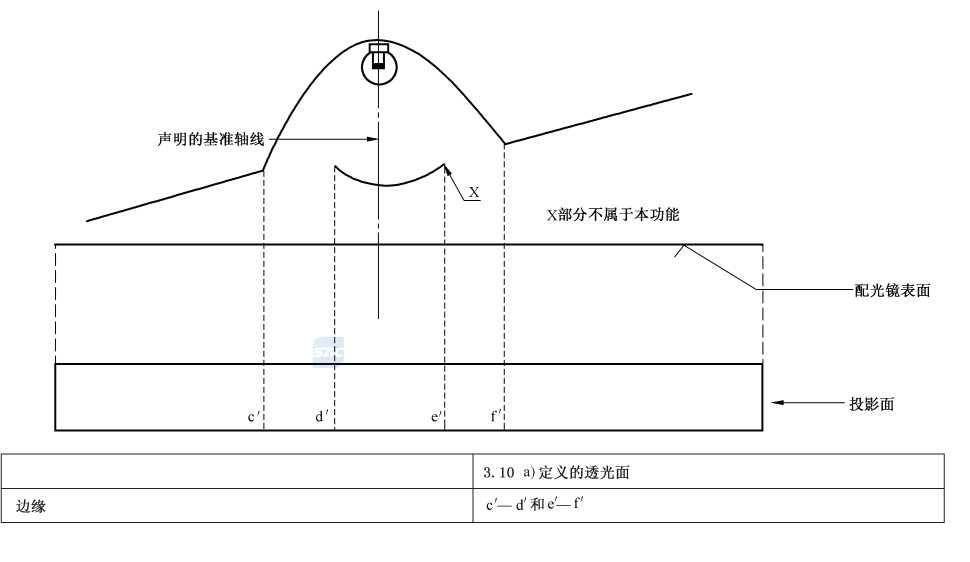
3 . 10
透光面 iight emitting SUrfaCe
透明材料的全部或部分外表面,该表面由装置制造商在试验所附的图纸中标岀。宜依照以下条件 标出:
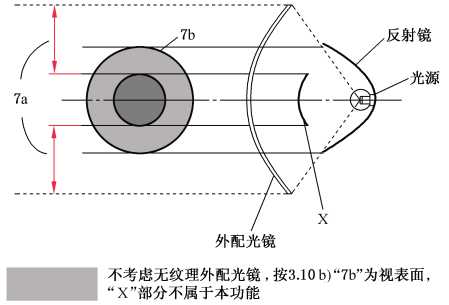
a) 在外配光镜有纹理的情况下,透光面是外透镜的全部或部分表面;
b) 在外配光镜无纹理的情况下,外配光镜可忽略,透光面应在图纸中标岀。
注1:透光面的示例参见附录B中B.3.1和B.3.4.
注2:条件b)的示例参见B.3.5。
3. 10. 1
有纹理外配光镜textured outer lens
有纹理外配光镜区域textured outer IenS area
全部或部分的外配光镜,其设计用来影响光源光束的传播,例如使光线与其原方向产生明显偏移。
3. 11
发光面 illuminating SUrfaCe
注:发光面的示例参见附录BO
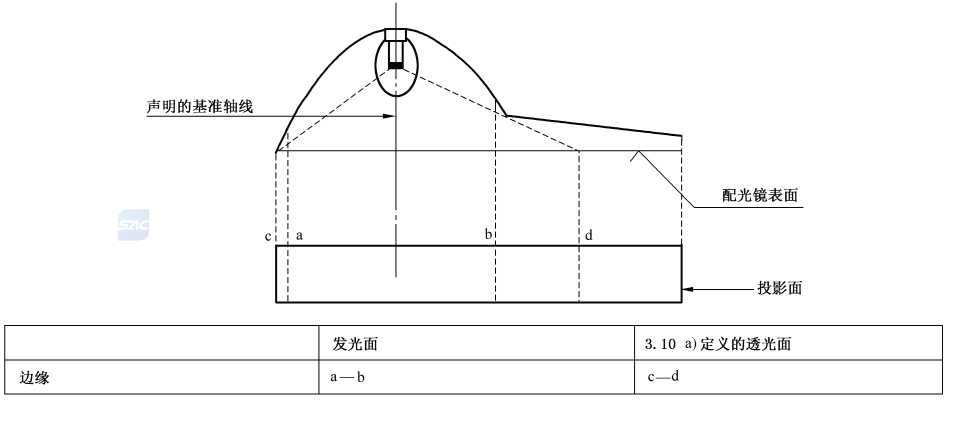
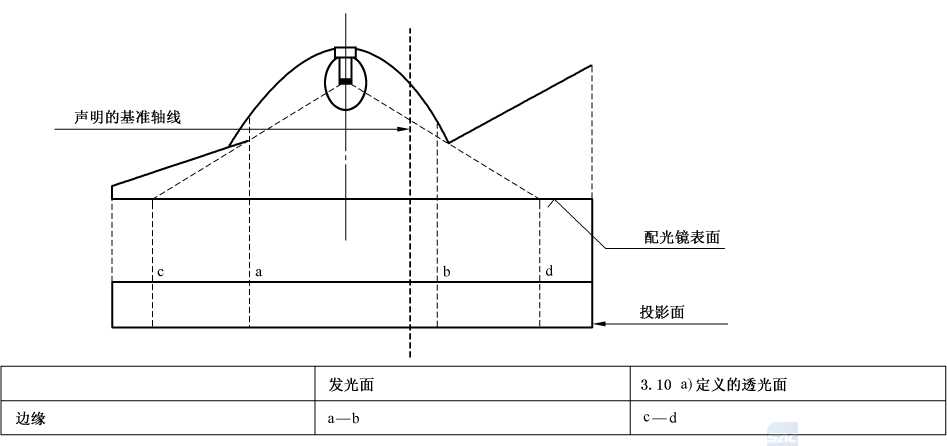
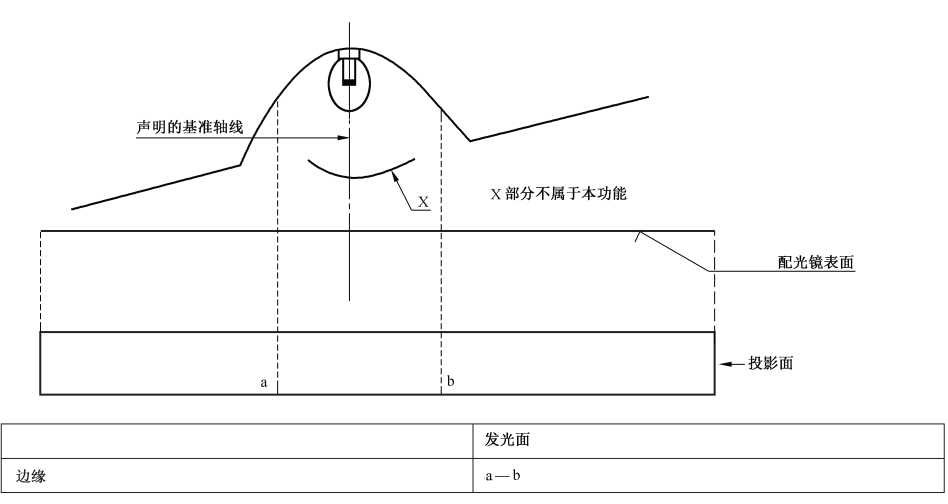
3. 11. 1
照明装置的发光面 illuminating SUrfaCe of a iighting device
反射镜整个口径在一个垂直于基准轴线的横截面上的垂直投影,或对于具有椭球面反射镜的前照 灯,其投影透镜在一个垂直于基准轴线的横截面上的垂直投影。若照明装置没有反射镜,则适用3.11.2 的定义。若灯具的透光面只占据反射镜口径的一部分,则只考虑该部分的投影。
对于近光灯,发光面受到明暗截止线在配光镜上视在图样的限制。如果反射镜和配光镜之间的相 对位置可以调节,则应保持在平均调节位置上。
对于安装AFS的情况:当照明功能同时由单侧的两个或更多的照明单元共同形成,则发光面由这 些照明单元共同组成(例如,图3中,照明装置8、9、11的单个发光面,按其各自位置,共同组成了位于车 辆右侧的发光表面)。
注:照明装置的发光面涉及的灯具包括:远光灯,近光灯,前雾灯,倒车灯,角灯,自适应前照明系统。
3. 11. 2
除回复反射器外的光信号装置的发光面 illuminating SUrfaCe of a iight-Signaiimg device other than a retro-reflector
光信号装置在垂直于基准轴线且与透光面外表面相接触的平面上的垂直投影。该投影的周边由位 于投影平面上的诸屏蔽框边缘确定,在基准轴线方向上每次仅能发射岀98%的发光强度。
注:除回复反射器外的光信号装置的发光面涉及的灯具包括:转向信号灯、制动灯、牌照灯、前位灯、后位灯、危险警 告信号、后雾灯、驻车灯、示廓灯、侧标志灯、昼间行驶灯、牵引杆挂车标志灯。
3.11.3
回复反射器的发光面 illuminating SUrfaCe Of aretro-refɪeetor
回复反射器上由一组平面所围成的面在垂直于其基准轴线平面上的投影。该组平面平行于回复反 射器基准轴线,且通过它的光学组件的最外边缘。在确定回复反射器的上、下和横向边缘时,只考虑水 平面和垂直面。
3 . 12
视表面 apparent SUrfaCe
按制造商要求,或是投影在配光镜外表面上的发光面边界在特定观察方向一平面上的垂直投影,或 是透光面在特定观察方向一平面上的垂直投影,该平面垂直于观察方向,且与配光镜最外面的点相 接触。
注1: 3.8.3定义的可变光强控制器所引起的可变发光强度的光信号装置在可变光强控制器所允许的所有情况下, 其视表面允许可变。
注2:视表面的示例参见附录BO
3 . 13
基准轴线 axis of reference;reference axis
由制造商规定的灯具特征轴线,在配光测量和灯具安装时,作为角视场的基准方向(H = 0°
V = OO)O
3 . 14
基准中心 Centre of reference
基准轴线与透光面外表面的交点。由灯具制造商规定。
3 . 15
几何可见度角 angles of geometrC ViSibfity
灯具视表面可见的最小立体角。该立体角由球的一部分确定,球心位于灯具的基准中心,中纬线与 地面平行。以基准轴线为基准,水平方向角月表示经度,垂直方向角α表示纬度。
3.16
外缘端面 extreme outer edge
平行于车辆纵向对称平面,且与车辆外缘接触的平面。下列凸岀物除外:
——轮胎与地面接触(变形)部分以及轮胎压力传感器的连接件;
——轮胎上的各种防滑装置;
——后视镜(间接视野装置);
——侧转向信号灯,示廓灯,前、后位灯,驻车灯,回复反射器和侧标志灯;
—— 固定在车辆上的海关封印,以及为了保护和固定这些封印的装置。
3 . 17
整体尺寸 overall dimensions
3 . 17 . 1
车宽 overall Width
车辆两侧外缘端面的两个垂直平面间的距离。
3 . 17 . 2
车长 overall length
垂直于车辆中央对称平面的两个垂直平面间的距离,即车辆前后外缘垂直平面的距离,但不包括下 列凸岀物:
——后视镜(间接视野装置);
--小廓灯;
——机动车辆的连接装置。
注:对于挂车,其总长或涉及长度的测量是包括挂钩长度的(除非有特殊说明)。
3.18
单灯和多灯 single and multiple lamps
3 . 18 . 1
单灯 a Singk IamP
下列几种情形的统称:
a) 一个装置或装置一部分,具有一个功能、一个或多个光源、一个在其基准轴线上的视表面(该视 表面可以是连续的或是由两个或多个分开的部分组成);或
b) 两只“D”型灯组成的组合件;或
C)两只独立回复反射器(分开进行型式试验)组成的组合件;或
d)由两只或三只互存灯具组成的互存灯系统。
3. 18. 2
双灯 two IamPS
偶数灯 an even number of lamps
两只灯具,使用同一带(条)状透光面的装置,且透光面对称于车辆纵向对称平面。
3. 19
两灯间距 distance between two IamPS
在基准轴线方向上两视表面之间的最短距离。若该间距明显满足本标准要求,则不需要确定视表
面的精确边缘。 霸
3.20
工作指示器 OPeratmg tell-tale
用于指示某一装置已被接通,并表明其工作是否正常的指示灯或蜂鸣器(或任何等效信号)。
3. 21
接通指示器 CIOSed-CirCUittell-tale
用于指示某一装置已被接通,但并不表明其工作是否正常的指示灯(或任何等效信号)。
3. 22
选装灯 optional lamp
符合本标准要求的,由制造商决定是否安装的灯具。
3. 23
地面 ground
水平的车辆停放面。
3. 24
可移动部件 movabe components
车辆的可动部件。不使用工具,可以通过倾斜,转动或滑动改变位置的车身面板或其他车辆部件。 但不包括载货车的可倾斜驾驶室。
3. 25
可移动部件的正常使用位置 normal POSitiOn of USe of a movable component
可移动部件处于由车辆制造商规定的使用位置。
3.26
车辆正常使用状态 normal COndUk)n of USe of a VehkIe
对于机动车,车辆已准备行驶,发动机已起动,可移动部件已处于可移动部件的正常使用位置(3.25)。
对于挂车,已与牵引的机动车连接,后者已处于上述的状态,其可移动部件也处于可移动部件的正 常使用位置(3.25)。
3.27
车辆驻车状态 Park COnditiOn Of a Vehide
对于机动车,车辆静止,其发动机停止工作,可移动部件处于可移动部件的正常使用位置(3.25)。
对于挂车,已与处于上述状态的牵引机动车连接,可移动部件处于可移动部件的正常使用位 置(3.25)。
3 . 28
弯道照明bend lighting
一种在弯道提供增强照明的照明功能。
3 . 29
成对Pair
具有相同功能,分别安装于车辆左右侧的一对灯具。
3 . 29 . 1
配套成对matched Pair
作为成对灯具,具有相同功能,作为一个整体符合配光要求,分别安装于车辆左右侧的灯。
3 . 30
H 平面 H plane
通过灯具基准轴线的水平平面。
3 . 31
顺序开启 SeqUentiaI activation
灯具中的各光源由电子系统控制,按预置序列打开。
4 —般要求
42照明及光信号装置应保证在3.26定义的车辆正常使用状态下,即使受到振动,仍应符合本标准中 对于各装置以及整车的要求。不能由于不当操作引起对装置不正确的调整。特别是灯具不能松动和 失调。
4.2近光灯、远光灯和前雾灯的安装,应便于其照准的正确调节。
4.3所有的光信号装置(包括安装于车辆侧面的光信号装置)安装时其基准轴线应平行于车辆在道路 上的停放面。此外,对于侧回复反射器和侧标志灯,其基准轴线应垂直于车辆纵向对称平面,而所有其 他光信号装置的基准轴线则与之平行。每个方向上允差为士3。。如果制造商另有特殊安装说明,也应 遵循。
4.4如无特别说明,检验灯具安装高度和方向时,被测车辆应空载并置于水平地面上,车辆应处于3.26 定义的状态中。AFS应处于中性状态。
4.5成对灯具的安装要求,应满足以下要求:
a) 相对于车辆纵向对称平面,对称地安装在车辆上(以灯具外形来判断,而不是3.11定义的发光 面边缘)。
b) 相对于纵向对称平面,相互对称,不包括灯具的内部结构。
C)满足相同的色度要求和配光要求。本条不适用于配套成对的F3级前雾灯。
4.6对于外形不对称的车辆,也应尽可能满足4.5要求。
4.7单灯以及组合灯、复合灯和混合灯应满足以下要求:
a)灯具在符合各自的光色、安装位置、方向、几何可见度、电路连接和其他要求的情况下,彼此可 以组合、复合或混合。且应满足以下要求:
1) 在组合、复合或混合的其他灯具均关闭的情况下,灯具应满足其配光和色度要求。对于前 位灯或后位灯与一个或多个功能混合,并同时工作的情况,应保证该功能和前位灯/后位 灯同时打开时,满足该功能的色度要求。
2) 制动灯不准许与转向灯混合。
3) 若制动灯与转向灯组合的情况,应保证视表面在垂直于基准轴线方向上的投影所形成的 不同颜色的相邻区域边界,水平和垂直方向直线穿越上述边界不能超过两次。且基准轴 线方向上,基于透光面的视表面不得有任何重叠。
b)对于单灯,应满足以下要求:
1) 对于3.18.1 a)所述的单灯,若视表面由在基准轴线方向上几个分开的部分共同组成,应满 足下列要求:各部分在基准轴线方向上的投影面积之和不应小于该功能边界在基准轴线 方向上投影的外围最小四边形面积的60% ;或在基准轴线方向上,两个相邻/相切的部分 间距不超过75 mm(间距测量方向垂直于基准轴线)。本要求对于远光灯、近光灯、前雾 灯和回复反射器不适用。
2) 对于3.18.1 b)或3.18.1 C)所述的两只“D”型灯或两只独立回复反射器,应满足下列要求: 两只灯具或回复反射器在基准轴线方向上的视表面面积之和,不应小于该功能边界在基 准轴线方向上投影的外围最小四边形面积的60% ;或在基准轴线方向上,两视表面相邻 间距不超过75 mm(间距测量方向垂直于基准轴线)。带(条)状灯具中一部分可以作为 “D”型灯具。
3) 对于3.18.1 d)所述的单灯,应符合4.7 b)1)要求。同一灯体或外配光镜包含两只及两只 以上灯具(或视表面),不作为互存灯系统。带(条)状灯具中一部分可以作为互存灯系统 的一部分。互存灯系统中所有光源应同时打开和关闭。
C)带(条)状双灯或偶数灯外形应对称于车辆纵向对称平面,长度不小于0.8 m,其两端至车辆外 缘端面的距离不大于0.4 m;光源不少于两个,且尽量靠近两端;透光面可以由数个并列的发 光单元构成,此时,这些发光单元的透光面并列在横截面上的投影应符合4.7 b)1)要求。
4.8最大离地高度应从基准轴线方向上视表面的最高点开始测量,最小离地高度应从基准轴线方向上 视表面的最低点开始测量。(若安装位置明显满足本标准要求,则不需要确定任何表面的精确边缘。)以 下情况除外:
a) 对于离地高度可减小几何可见度要求的情况,应以灯具H平面为基准,测量离地高度。
b) 对于近光灯和前雾灯,最小离地高度应从光学系统的(例如:反射镜、配光镜、投射透镜)有效口 径的最低点开始测量。
C)横向安装位置,对于全宽度:由离车辆纵向对称平面最远的基准轴线方向上的视表面边缘确 定。对于两灯间距,由基准轴线方向上视表面的诸内边缘确定。
4.9如无特殊说明,灯具工作期间,其光学特性(如:光强、颜色、视表面等)不得随意改变。以下情况 除外:
a) 转向信号灯,危险警告信号和符合5.18.7规定的侧标志灯,以及紧急制动信号允许闪烁。
b) 光学特性允许变化的情况:
——随外界环境光变化;
——随其他灯具开启而进行的变化; 当灯具切换为另一` 个功能。
所有上述光学特性变化应符合灯具相关的技术规定。
C) 1、1a、1b、2a或2b类转向灯的光学特性,在符合GB 17509规定的前提下,允许采用顺序开启 的闪烁方式。2a和2b类转向灯按5.23.1执行紧急制动信号时不得使用该闪烁方式。
4.10对于3.9中定义的诸灯,从车前应观察不到红光,从车后应观察不到白光(车辆内部灯除外)。如 有异议,应按照以下方法进行检验:
a) 前视红光不可见度:当观察者在附录C所示,离车辆前部相距25 m,区域1的横截面内移动观 察时,不应直接看到红色灯具的视表面(车辆尾部红色侧标志灯除外),见图C.1。
b) 后视白光的不可见度:当观察者在附录C所示,离车辆尾部相距25 m,区域2的横截面内移动 观察时,不应直接看到白色灯具的视表面(倒车灯和车辆侧面的醒目标志除外),见图C.1。
C)在上述两个横截面内,观察者进行移动观察的区域1和区域2范围:
1) 高度:由两个离地高度各为Im和2.2 m的水平面限定。
2) 横向:在车前和车后,分别由两个垂直平面限定。该两垂直平面与车辆纵向对称平面成向 外15°角,且通过与限定车宽的,平行于车辆纵向对称平面的垂直平面的接触点。若有多 个接触点,则车前相交于最前面的接触点,车后的相交于最后面的接触点。
4.11电路连接应保证前位灯、后位灯、示廓灯(若安装)、侧标志灯(若安装)、牌照灯和牵引杆挂车标志 灯只能同时打开或关闭。下列情况除外:
a) 前位灯、后位灯、侧标志灯(与上述灯复合或混合)作为驻车灯使用时。
b) 侧标志灯与转向信号灯一起闪烁时。
C)光信号系统处于5.2.7.6 b)情况时。
d) 近光灯和/或远光灯和/或前雾灯按4.12代替前位灯功能时。
e) 当位置灯开关处于关闭挡,并且发动机(推进系统)的点、熄火控制装置处于使发动机(推进系 统)可以工作的状态时,前位灯和/或后位灯允许自动开启,直至发动机(推进系统)停止工作或 按本标准相关要求关闭。但5.9.7和5.10.7情况除外。
4.12电路连接应保证,即只有当上述4.11中的诸灯打开时,远光灯、近光灯和前雾灯才能打开。然 而,当远光灯和近光灯作为警告信号功能时,则上述情况不适用(即间歇地打开远光灯或近光灯,或间歇 地交替打开远光灯和近光灯)。且满足下列要求时,近光灯和/或远光灯和/或前雾灯可以代替前位灯的 功能:
a) 电路连接保证上述各任何灯具失效时,前位灯可以自动开启;且
b) 代替前位灯的各灯具/功能,应符合下列条件(应在相应灯具的检测报告中予以证明):
——符合5.9.5规定的前位灯几何可见度要求;且
——满足几何可见度范围内最小配光限值要求。
4.13本标准中的“接通”指示器可用“工作”指示器替代。
4.14对于可藏灯应满足下列要求:
a) 除了远光灯、近光灯和前雾灯在不使用时可隐藏外,其他灯具不应可藏。
b) 若使用中的可藏灯控制装置岀现故障,灯具应仍处于使用位置,或者不使用工具即可移动到使 用位置。
C)利用一个控制开关,即可将可藏灯移至使用位置并打开,也可以不打开。然而当远光灯和近光 灯组合时,上述控制开关应只能开启近光灯。
d) 在灯具到达使用位置之前,驾驶座旁的控制开关应无法停止已打开的灯具移动。若在移动过 程中会引起对其他使用道路者的眩目,则应在达到使用位置时才打开灯具。
e) 可藏装置在一30 °C〜+ 50 °C的范围内,一旦开启控制开关,前照灯应在3 S内达到使用位置O 4.15光色采用GB/T 3977中CIE 1931XYZ色度系统,见表1〜表4(本标准的型式试验不涉及灯具 色度坐标的检测)。灯具的光色要求见表5。
表1装置发出的光色
|
颜色 |
色度区域边界 |
边界交点 |
|
白色 |
W12 绿色边界:^ = 0.150 + 0.640^ W23黄绿色边界^ = 0∙440 W34黄色边界充= 0.500 W45紫红色边界^ = 0∙382 W56 紫色边界 ^ = 0.050 + 0∙750^ W61蓝色边界充= 0.310 |
狓 y W1 0∙310 0∙348 W2 0∙453 0∙440 W3 0∙500 0∙440 W4 0∙500 0∙382 W5 0∙443 0∙382 W6 0∙310 0∙283 |
|
选择性黄色 |
SY12 绿色边界 ^ = 1.290^ — 0.100 SY23光谱轨迹 SY34 红色边界 ^ = 0.138÷0∙580^ SY45黄白色边界^ = 0∙440 SY51白色边界^ = 0∙940—充 |
狓 W SY1 0∙454 0∙486 SY2 0∙480 0∙519 SY3 0∙545 0∙454 SY4 0∙521 0∙440 SY5 0∙500 0∙440 |
|
琥珀色 |
Λ12绿色边界W =充一0120 Λ23光谱轨迹 Λ34红色边界w = 0∙390 Λ41 白色边界 ^ = 0790 — 0670^ |
狓 W Λ1 0∙545 0∙425 Λ2 0∙560 0∙440 Λ3 0∙609 0∙390 Λ4 0∙597 0∙390 |
|
红色 |
R12黄色边界w = 0∙335 R23光谱轨迹 R34紫线(其延长线穿过光谱轨迹红色和蓝色端点之间的紫色范 围) R41 紫色边界:w = 0∙980 — ɪ |
狓 W R1 0∙645 0∙335 R2 0∙665 0∙335 R3 0∙735 0∙265 R4 0∙721 0∙259 |
表2回复反射后的夜间光色
|
颜色 |
色度区域边界 |
边界交点 | ||
|
W12蓝色边界:w = 0.843 —1∙182狓 |
狓 |
W | ||
|
W23紫罗兰色边界w = 0∙489狓÷ 0∙146 |
W1 |
0∙373 |
0∙402 | |
|
白色 |
W34 黄色边界 w = 0∙968-1∙010狓 |
W2 |
0∙417 |
0∙350 |
|
W41绿色边界w = 1∙442狓一0136 |
W3 |
0∙548 |
0∙414 | |
|
W4 |
0∙450 |
0∙513 | ||
|
Y12绿色边界W=狓一0040 |
狓 |
W | ||
|
Y23光谱轨迹 |
Y1 |
0∙505 |
0∙465 | |
|
黄色 |
Y34 红色边界 w = 0∙200狓÷0∙268 |
Y2 |
0∙520 |
0∙480 |
|
Y41白色边界w = 0∙970一狓 |
Y3 |
0∙610 |
0∙390 | |
|
Y4 |
0∙585 |
0∙385 | ||
表2 (续)
|
颜色 |
色度区域边界 |
边界交点 | ||
|
Λ12 绿色边界 ^ = 1.417^ — 0.347 |
Z |
狔 | ||
|
Λ23光谱轨迹 |
Λ1 |
0.545 |
0.425 | |
|
Λ34红色边界^ = 0∙390 | ||||
|
琥珀色 |
Λ2 |
0.557 |
0.442 | |
|
Λ41 白色边界 ^ = 0.790 — 0.670充 | ||||
|
Λ3 |
0.609 |
0.390 | ||
|
Λ4 |
0.597 |
0.390 | ||
|
R12黄色边界^ = 0∙335 |
Z |
狔 | ||
|
R23光谱轨迹 |
R1 |
0.643 |
0.335 | |
|
R34紫线 | ||||
|
红色 |
R2 |
0.665 |
0.335 | |
|
R41紫色边界^ = 0.978 — ɪ | ||||
|
R3 |
0.735 |
0.265 | ||
|
R4 |
0.720 |
0.258 | ||
表3装置反射的日间光色
|
颜色 |
色度区域边界 |
边界交点 |
|
W12紫罗兰色边界狔=Z— 0.030 |
Z 狔 | |
|
W23黄色边界狔= 0.740 —z |
W1 0.300 0.270 | |
|
白色 |
W34绿色边界狔= z + 0,050 |
W2 0.385 0.355 |
|
W41蓝色边界狔= 0.570 —z |
W3 0.345 0.395 | |
|
W4 0.260 0.310 | ||
|
Y12 红色边界狔= 0.534z+ 0.163 |
Z 狔 | |
|
Y23白色边界狔= 0.910 —z |
Y1 0.545 0.454 | |
|
黄色 |
Y34 绿色边界狔= 1.342z — 0.090 |
Y2 0.487 0.423 |
|
Y41光谱轨迹 |
Y3 0.427 0.483 | |
|
Y4 0.465 0.534 | ||
|
R12 红色边界狔= 0.346 — 0.053z |
Z 狔 | |
|
R23紫色边界狔= 0.910 —z |
R1 0.690 0.310 | |
|
红色 |
R34黄色边界狔= 0.350 |
R2 0.595 0.315 |
|
R41光谱轨迹 |
R3 0.560 0.350 | |
|
R4 0.650 0.350 |
表4荧光装置的日间颜色
|
颜色 |
色度区域边界 |
边界交点 |
|
红色 |
FR12 红色边界狔= 0.346 — 0.053z FR23紫色边界狔= 0.910 —z FR34 黄色边界狔= 0.315 + 0.047z FR41光谱轨迹 |
Z 狔 FR1 0.690 0.310 FR2 0.595 0.315 FR3 0.569 0.341 FR4 0.655 0.345 |
表5光色
|
灯具名称 |
光色 |
|
远光灯 |
白色 |
|
近光灯 |
白色 |
|
前雾灯 |
白色或选择性黄色 |
|
制动灯 |
红色 |
|
紧急制动信号 |
琥珀色或红色 |
|
牌照灯 |
白色 |
|
前位灯 |
白色 |
|
后位灯 |
红色 |
|
后雾灯 |
红色 |
|
倒车灯 |
白色 |
|
转向信号灯 |
琥珀色 |
|
危险警告信号 |
琥珀色 |
|
驻车灯 |
前面白色,后面红色。若与侧转向信号灯、侧标志灯混合则为琥珀色 |
|
侧标志灯 |
琥珀色。若与后位灯、后示廓灯、后雾灯、制动灯组合,或复合,或混 合,或与后回复反射器组合或共有透光面,则最后面的侧标志灯可以 为红色 |
|
示廓灯 |
前面白色,后面红色 |
|
昼间行驶灯 |
白色 |
|
非三角形后回复反射器 |
红色 |
|
三角形后回复反射器 |
红色 |
|
非三角形前回复反射器 (即白色或无色回复反射器) |
与入射光相同 |
|
非三角形侧回复反射器 |
琥珀色。若与后位灯、后示廓灯、后雾灯、制动灯、最后面的红色侧标 志灯或非三角形后回复反射器,组合或共有透光面则可以为红色 |
|
角灯 |
白色 |
|
醒目标志 |
车身反光标识:红色和白色 尾部标志板:红色和黄色 |
|
自适应前照明系统(AFS) |
白色 |
|
牵引杆挂车标志灯 |
前面白色,后面红色 |
|
慢行灯 |
白色 |
|
追尾警告信号 |
琥珀色 |
4.16车辆上灯具的安装数量应符合第5章特殊规定中的相应要求。
4.17除回复反射器外的光信号装置发光面按下述方法确定:
a)在确定发光面的上、下和横向边缘时,屏蔽框边缘应是水平的或垂直的,并以此计算到汽车外 边缘的距离和离地高度。
对于发光面的其他应用,例如两灯具或功能的间距,应考虑该发光表面的外形边界。屏蔽框保
持平行,且允许使用任何方向。
如果光信号装置的发光面完全或部分围绕另一个功能的发光面(或不发光的表面),则发光面 可视为透光面本身(参见附录B中B.3.2,B.3.3,B.3.5和B.3.6)o
b)对于发光面的所有应用,确定上、下和横向边缘时,屏蔽框边缘应是水平的或垂直的。
4.18对于安装在可移动部件上的后位灯、后转向灯、三角形/非三角形后回复反射器应满足以下要求:
a) 灯具在移动部件所有的固定位置上均符合各自的安装位置、几何可见度、色度和配光性能要 求。或当移动部件移至固定打开位置时,存在附加灯具会自动开启,替代移动部件上的灯具符 合其安装位置、几何可见度和配光性能的要求。
b) 对于由两只“D”型灯组成的灯具,只需要其中一只满足在移动部件所有的固定位置上灯具的 安装位置、几何可见度和配光性能要求即可[即认为满足4.18 a)],或当移动部件移至固定打 开位置时,存在附加灯具会自动开启,替代移动部件上的灯具符合其安装位置、几何可见度和 配光性能的要求。
C)对于使用互存灯系统,应符合下述条件之一:
一当整个互存灯系统均安装于移动部件时:应满足4.18 a)的规定。也允许当移动部件移至 打开位置时,存在附加灯具会自动开启,替代移动部件上的灯具符合安装位置、几何可见 度、色度和配光性能的要求。
——当互存灯系统(转向信号灯除外)中仅部分灯具安装在移动部件上时:制造商应保证,移动 部件在任何固定位置,系统中均有互存灯具,符合该功能的安装位置、向外几何可见度、色 度和配光要求。移动部件在任何固定位置,互存灯具仍能满足相应配光限值要求的,则认 为满足向内的几何可见度要求。
——对于转向灯信号灯,移动部件在任何固定位置,均有互存灯符合该功能的安装位置、几何 可见度、色度和配光要求。或,当移动部件移至打开位置时,存在附加灯具会自动开启,替 代移动部件上的转向灯符合安装位置、几何可见度、色度和配光性能要求。
d)在满足4.18 b)和4.18 c)要求时,移动部件不处于“可移动部件的正常使用位置”时,允许移动 部件上面相应的功能灯具关闭。
4.19当移动部件不处于“可移动部件的正常使用位置”时,装置的安装不应造成其他使用道路者的过 分不适。
4.20当灯具安装在移动部件上,且移动部件处于“可移动部件的正常使用位置”,则按本标准要求,灯 应始终能返回到制造商规定位置上。对于近光灯和前雾灯,若移动部件从正常使用位置上移开并返回 10次,每次所测量的相对于其支撑件的倾斜角与10次平均值之间的偏差不大于0.15%,即满足了上述 要求。若结果超岀这个限值要求,则当按附录D检验车辆时,应对5.2.6.1.1中规定的允许范围进行调 整,减去超岀量以缩小倾斜度的允许范围。
4.21当从基准轴线方向观察时,任何可移动部件(不管是否装有光信号装置),在所有固定位置上遮蔽 前、后位灯,前、后转向信号灯和前、后回复反射器不应超过其视表面的50% O如果上述条件无法满足 时,应符合下列的要求:
a) 存在附加灯具会自动开启,并保证上述灯具在被移动部件遮蔽基准轴线方向上视表面50%以 上的情况下,仍能符合所有安装位置、几何可见度、色度和配光性能要求。或
b) 在灯具试验材料中应加以说明:在基准轴线方向上,移动部件会遮蔽50%以上的视表面;且, 在上述情况下,车辆上应有注意事项明示用户,在可移动部件的某些位置上,应警告其他道路 使用者车辆的存在,例如使用警告三角牌或国家规定的其他装置。本要求不适用于回复反 射器。
4.22除回复反射器外,所有的灯具(包括已有通过型式检验的灯具),在装有光源或/和保险丝之后,若 无法点亮,则可不予考虑。
4.23对于使用符合GB 15766.1和ECE R37中可更换灯丝灯泡光源的灯具(3.7.2定义的不可更换光 源除外),其在车辆上的安装,应保证可以无需专用工具或特殊工具,便可对光源进行更换,除非这些工 具在车辆上已有装备,且制造商应随车提供更换方法的详细说明。
对于光源模块,若其带有灯座与GB 15766.1和ECE R37中的可更换光源灯座相同,其也应符合本 规定。
4.24当后位灯发生暂时故障时,允许使用光色,中心发光强度和位置与其相近的灯具代替,同时替代 灯保持原有的功能。在这期间,面板上的工作指示器(见3.20)应表明,发生暂时替代,需要检修。
4.25若安装AFS,其等同于一对近光灯,和一对远光灯(若配备)。
4.26后转向灯、后位灯、制动灯(除S4制动灯)以及后雾灯允许可变光强。上述可变光强控制可对下 列至少一种外界影响同时产生反应:环境照明、雾、降雪、降雨、喷雾、沙尘、透光面污染。且应保证其光 强关系在变化过渡期间维持不变。在过渡期间不应岀现可察觉的强烈变化。S4类制动灯可以独立于 其他灯具产生光强变化。允许配备手动操作功能,允许驾驶员将上述灯具的光强调至其稳定光强状态, 也可将其恢复到自动可变状态。
4.27对于M和N类车辆,申请人应向检测机构证明,当车辆电气系统处于对应机动车辆类别的稳定 电压运行时,远光灯、近光灯、制动灯、前位灯和后位灯装置的供电情况符合下列的规定:
a) 供电装置的终端电压在符合上述功能型式试验描述的条件下(如含有特殊供电装置、光源电子 控制装置或处于次级操作模式对电压有特殊规定),电压不应超岀型式试验描述文件中的规定 电压范围。
b) 对于4.27 a)中未涉及的供电情况,装置或功能的终端稳定电压不得超过6.75 V(6 V系统), 13.5 V(12 V系统)或28.0 V(24 V系统)的5%以上。允许装置本身带有终端最大电压控制 功能。
C)对于自带光源控制器或可变光强控制器的灯具不适用上述4.27 a)和4.27 b)的规定。
d)型式试验材料中,应提供文件证明符合性所用的方法和结果。
4.28灯具的几何可见度一般要求按下述方法进行:
a) 当从远处观察时,在几何可见度范围内,不应有阻碍视表面所发光线传播的障碍物。若灯具在 以往的型式检验时已存在障碍物,则在几何可见度内的这些障碍物可不予考虑。
b) 若在灯具近处测量,则沿观察方向平行移动,以得到相同的准确度。
C)若安装灯具时,其视表面受到车辆部件的部分遮蔽,则应提供证明,表明灯具未受遮蔽的部分 仍满足型式检验所需的配光值。
d) 对于离地安装高度小于750 mm的灯具[测量方法参照4.8 a)],其向下的几何可见度可以减 至5°。其相应的配光测量范围也可以减至5°。
e) 对于互存灯系统,其几何可见度应在所有互存灯开启时测量。
4.29总质量不小于4 500 kg的货车、专项作业车和挂车的所有后位灯、后转向信号灯和制动灯,其透 光面面积应不小于一个80 mm直径圆的面积;若透光面不是圆形,其形状应能容纳一个40 mm直径 的圆。
4.30 LED模块允许不可更换。
4.31在车辆静止且满足下列一项或多项条件时,非本标准定义的外部照明和光信号装置可开启,但不 得危害本标准定义的外部照明和光信号装置有效性:
——发动机(推进系统)停止工作;
——驾驶员或乘客的车门已经打开;
——行李箱门已经打开。
5特殊规定
5.1远光灯(符合GB 4599除A级外、GB 21259、GB 25991要求的灯具)
5.1.1配备
汽车应配备,挂车不应使用。
5.1.2数量
两只或四只。对于N类车辆可以多安装两只远光灯。当车辆安装四只可藏式前照灯时,其中两只 附加前照灯只允许用于昼间发岀间歇光信号功能(见4.12)。
5.1.3布局
无特殊要求。
5.1.4位置
5.1.4.1横向:无特殊要求。
5.1.4.2高度:无特殊要求。
5.1.4.3纵向:安装在车辆前面,要求发射光不直接或间接地通过后视镜(间接视野装置)或车辆其他反 射面而引起驾驶员的不舒适。
5.1.5几何可见度
发光面的可见度(包括从观察方向看来似乎不发光的区域的可见度),应保证在其周长上的众母线 形成的扩散区域内。该区域与前照灯基准轴线间的夹角不小于5。。发光面在配光镜最前部分横切面 内的投影边界是几何可见度角的始端。
5.1.6方向
朝前。车辆单侧不得安装超过一只具有弯道照明功能而转动的远光灯。
5.1.7电路连接
5.1.7.1除非间歇地打开远光灯开启发岀警告信号,远光灯只有在前照灯开关位于前照灯的“ON”(打 开)位置或处于“AUTO”(自动)位置,并存在近光灯自动启动的条件时才可开启。对于后一种情形,当 近光灯自动启动的条件不存在时,远光灯应自动关闭。
5.1.7.2远光灯的控制可以是自动的,控制信号应由可探测下列各项并对其做岀反应的传感器系统 产生:
--环境光线条件;
——迎面驶来的车辆上,前部照明装置和前部光信号装置发岀的光线;
——前方行驶车辆的尾部光信号装置发岀的光线。
允许安装额外的可提升性能的传感器功能。
本条中的“车辆”指L、M、N、O类车辆,并认为这些车辆配备了回复反射器,并且照明和光信号系 统已打开。
5.1.7.3远光灯应可以随时手动开启或关闭,远光灯自动控制功能应可以手动关闭。此外,关闭远光灯 和远光灯自动控制功能的手动操作方式应简单且直接,不准许有次级操作。
5.1.7.4远光灯应同时或成对开启。当按照5.1.2多安装两只远光灯时,N3类车辆最多只能同时打开 两对。从近光变远光时,至少要打开一对远光灯。从远光变为近光时,所有的远光灯应同时关闭。
5.1.7.5远光灯打开时,允许近光灯也开着。
5.1.7.6当安装四只可藏式前照灯时,其上升位置应防止任何附加前照灯同时工作,后者只是用于在昼 间发岀间歇光信号。
5.1.8指示器
应配备接通指示器。如果前照灯如5.1.7.1所述自动控制,则应向驾驶员提供远光的自动控制已激 活的提示。在自动控制开启期间,该信息就一直显示。
5.1.9其他要求
5.1.9.1最大发光强度限值
所有可同时开启的远光灯,其最大发光强度之和应不超过430 000 CdO
5.1.9.2远光灯最大光强总值的获得
5.1.9.2.1在整车电源系统处于充电状态下,分别检测各远光灯最大光强,相加后获得,或
5.1.9.2.2通过型式试验报告中远光E1^值计算获得。
5.1.9.3对于自动开启和关闭的远光灯
5.1.9.3.1 5.1.7.1所述远光自动控制功能的要求
5.1.9.3.1.1传感器可探测的由其他车辆所发岀的光线(如5.1.7.1所述),最小范围边界由下述角度 确定:
——水平角度:向左15°,向右15°;
--垂直角度:见表6 O
表6传感器垂直方向最小范围边界
|
向上角度 |
5° | ||
|
传感器安装高度(传感器孔径中 心距离地面距离) |
小于2.0 m |
1.5 m 到 2.5 m |
大于2.0 m |
|
向下角度 |
2° |
2。〜5° |
5° |
这些角度是以传感器孔径中心,以及一条穿过孔径中心且平行于车辆纵向对称平面的水平直线为 基准测得的。
5.1.9.3.1.2传感器系统应能在水平直道上探测到:
——至少400 m的距离范围内的迎面而来的机动车;
——至少100 m的距离范围内的前方行驶的机动车或带挂车的车辆。
按上述要求检测时,迎面而来和前方行驶的机动车或带挂车的车辆应开启位置灯(若适用)和近 光灯。
5.1.9.3.2 5.1.7.1所述远近光功能相互间切换的要求
可自动执行,且应不会引起不适、注意力分散或眩目。
5.1.9.3.3自动控制装置整体性能的证明方式
5.1.9.3.3.1试验可由制造商提岀的模拟方法或其他方法进行,但应经过检测机构认可。
5.1.9.3.3.2附录E中E.1所述的驾驶试验。自动控制装置的性能应按照制造商的描述(提交证明文 件)进行检验。对任何明显的故障都应提岀异议(如闪烁)。
5.1.9.3.4自动控制的远光灯自动开启条件
在5.1.9.3.1.1和5.1.9.3.1.2所述区域和距离范围内,没有探测到5.1.7.2所提及的车辆,且所测环 境光线符合5.1.9.3.5规定O
5.1.9.3.5自动控制的远光灯应自动关闭的情况
在远光灯自动开启的情况下,当在5.1.9.3.1.1和5.1.9.3.1.2区域和距离范围内,探测到符合5.1.7.2 所定义“车辆”迎面而来或前方行驶时,远光灯应自动关闭。
当环境照度超过7 OOO IX时,远光灯应自动关闭。
制造商应采用模拟或检测机构认可的方法证明对上述要求的符合性。在必要情况下,使用经过余 弦校正的传感器,在与车辆传感器安装高度相同的水平面上测量照度。制造商可通过充足的证明文件 或检测机构认可的其他方式加以证明。
5.2近光灯(符合GB 4599除A级外、GB 21259、GB 25991要求的灯具)
5.2.1配备
汽车应配备,挂车不应使用。
5.2.2数量
两只。
5.2.3布局
无特殊要求。
5.2.4位置 S
5.2.4.1横向:离车辆纵向对称平面最远的基准轴线方向上的视表面外缘到车辆外缘端面的距离应不 大于4OO mm。
在基准轴线方向上,两视表面相邻边缘间的距离应不小于6OO mm。然而,该规定不适用于M1类 和N1类车辆。对于其他类车辆,若车辆宽度小于1 3OO mm,则上述间距可减至4OO mm。
5.2.4.2高度:离地高度不小于5OO mm,不大于1 2OO mm。对于N,G类(越野)车辆,最大高度可增加 到 1 5OO mm。
5.2.4.3纵向:装在车前。若发射光不直接或间接地由于后视镜(间接视野装置),或车辆其他反射面而 引起驾驶员的不舒适感,即满足要求。
5.2.5几何可见度
由3.15定义的α和S角来确定。
a:向上15°,向下1O°;
S:向外45°,向内1O°。
前照灯邻近其他部件的存在,不应因二次效应引起其他道路使用者的不舒适感。
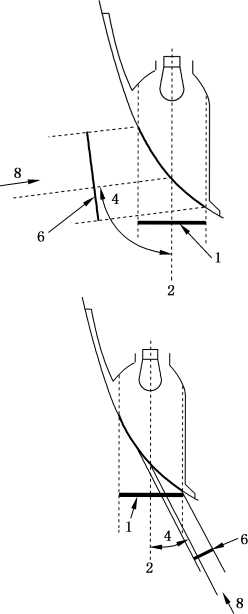
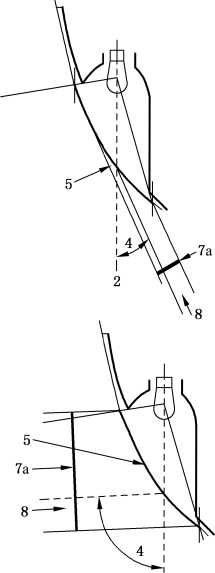
5.2.6方向 5.2.6.1垂直方向 5.2.6.1.1制造商应按0.1%的准确度规定,在驾驶座上一名人员的空载车条件下,近光明暗截止线的 初始下倾度,并以规定的符号(见附录F),将此数值标明在每辆车的制造商铭牌或前照灯附近。此标记 应清晰持久。
按5.2.6.1.2中规定,确定下倾度值。
5.2.6.1.2下倾度值的确定,取决于空载车条件下测量的近光灯在基准轴线方向上视表面下边缘的安 装高度"单位:m),对处于附录A各装载状况下的静止车辆,其近光明暗截止线的垂直向倾斜度应保 持在以下限值内,同时初始照准也在以下范围内:
犺V0.8 m 限值:—0.5%〜— 2.5%
初始照准:一1.0%〜一1.5%
0.8 m≤犺≤1.0 m 限值:一0.5%〜一2.5%
初始照准:一1.0%〜一1.5%
或根据制造商规定:
限值:一1.0%〜一3.0%
初始照准:一1.5%〜— 2.0%
在这种情况下,使用哪一种数值,提交车型认可时应予以说明。
犺〉1.0 m 限值:一1.0%〜— 3.0%
初始照准:一1.5%〜— 2.0%
有关限值和初始照准(值)的上述要求见图1。
对于前照灯高度大于1 200 mm的N,G类(越野)车辆为:
限值:一1.5% 〜— 3.5%
初始照准:一2.0%〜— 2.5%
h/m
1. 3
1.2
1. 1
1.0
0.9
0.8
0. 7
0.6
0. 5
0. 5 1.0 1. 5 2.0 2. 5 3.0 3. 5 ι∕%
图1近光灯下倾斜度值的确定
5.2.6.2前照灯调光装置要求
5.2.6.2.1前照灯自动调光装置:则应满足5.2.6.1.1和5.2.6.1.2要求。
5.2.6.2.2前照灯手动调光装置:应有一个停止位置,可以通过调节螺丝或者类似的方法使灯具回到 5.2.6.1.1定义的初始倾斜位置,那么不管是连续或者不连续调节的,都是被允许的。
手动前照灯调光装置应坐在驾驶座上就可以操作。
连续调节的装置应有标志来指示近光需要调节的装载情况。
非连续调节的装置上的调节位置数,在附录A定义的全部装载情况下,应符合5.2.6.1.2中要求的 范围。
对于这种装置,近光要求调节的附录A中的各类装载情况应明确地标志在该装置的控制器附近 (见附录G)O
5.2.6.2.3如果5.2.6.2.1和5.2.6.2.2所述的装置调节失效时,近光的下倾位置不应该高于发生故障时 的位置。
5.2.6.2.4若车辆结构能保证在附录A定义的全部装载情况,均能符合5.2.6.1.1〜5.2.6.1.2要求,允许 不安装调光装置,但其前照灯应具有调节明暗截止线高度的装置。
5.2.6.3测量方法
5.2.6.3.1经初始倾斜度调节后,以百分数表示的近光垂直向倾斜度,应在附录A确定的所有装载状况 的静态条件下测量。
5.2.6.3.2近光垂直向倾斜度应按附录D规定的方法进行测量。
5.2.6.4水平方向
为了形成弯道照明,可以改变一只或两只近光灯的水平方向,但是当移动整个光束或明暗截止线弯 曲肘部时,明暗截止线弯曲肘部不得与离车辆前方的距离为相应近光灯安装高度100倍距离外的车辆 重心轨迹相交。
5.2.6.5安装方向
朝前。
5.2.7电路连接
5.2.7.1切换近光时,应同时关闭所有的远光灯。
5.2.7.2远光灯开着时,近光灯允许开着。
5.2.7.3气体放电光源近光灯,在远光灯打开时,应保持打开。
5.2.7.4为了形成弯道照明,可以再打开位于近光灯中的或者与相应近光灯组合或混合的灯具(除远光 灯外)中的一个光源或一只或多只LED光源,但是车辆重心轨迹水平曲率半径应不大于500 m。制造 商可以通过计算或检测机构认可的其他方式予以证实。
5.2.7.5近光灯的开关可以是自动的。然而,近光灯的开关应能随时手动操作。
5.2.7.6当配备昼间行驶灯,且按5.19规定运行时应:
a) 近光灯应按附录H的要求,根据环境情况自动打开或关闭(例如:在车辆夜间行驶、进入隧道 等情况下自动开启)。
b) 昼间行驶灯与4.11规定的灯具共同操作,作为最低要求,至少后位灯应开启。
C)通知驾驶员前照灯、前位灯、后位灯以及示廓灯和侧标志灯(如配备)没有点亮。
1)针对夜间和昼间提供两个明显不同的仪表板照度级别,向驾驶员指岀应开启近光灯;或
2) 前照灯工作时,亮起符合GB 4094标识规定的不发光指示灯;或
3) 在附录H定义的环境亮度减小时,开启一个视觉、声音或两者皆有的指示器,以提醒驾驶 员打开近光灯。一旦指示器开启,只有当近光灯开启后或用于启动和/或停止发动机(推 进系统)的装置处于发动机(推进系统)无法运转的位置时才停止。
5.2.7.7在不违反5.2.7.6 a)的前提下,近光灯可以根据其他诸如时间或环境状况等因素(例如:时间 段,车辆位置,下雨,起雾等)自动开启或关闭。
5.2.8指示器
5.2.8.1 选装 O
5.2.8.2下述情况,应安装闪烁或不闪烁的指示器:
——采用移动整个近光光束或明暗截止线弯曲肘部以形成弯道照明功能;或
——主近光由一个或多个LED模块产生(除非电路连接保证当任何LED模块发生故障时,所有模 块熄灭)。
下列情况,指示器应开启:
——明暗截止线弯曲肘部转动发生故障;或
——用于形成主近光的任意一只LED模块发生故障(除非电路连接保证当任何LED模块发生故 障时,所有模块熄灭)。
岀现故障状态时,指示器应一直开启,允许临时关闭,但当启动或停止发动机装置时,其应再次 开启。
5.2.9其他要求
本标准4.5 b)要求不适用于近光灯。
当单侧近光灯光源光通量或用于产生主近光的LED模块总光通量超过2 000 Im时,应配备符合 GB/T 21260的前照灯清洗装置。
对于下倾度,5.2.6.2.2规定的装置不应用于下述情况:
——单侧主近光光源或光源模块目标光通量大于2 000 ImO
上述“目标光通量”,以试验电压为准。
对于允许使用多个试验电压的灯丝灯泡,上述产生主近光的“目标光通量”以进行光源型式试验的 产品试验电压为准。
只有符合GB 4599或GB 21259或GB 25991的近光灯才能用于实现弯道照明。
左转弯时,如果弯道照明是通过水平移动整个光束或明暗截止线弯曲肘部来实现,那么只有在车辆 前行时才能被开启。
5.3前雾灯(符合GB 4660要求的灯具)
5.3.1配备
汽车选装。挂车不应安装。
5.3.2数量
两只。
5.3.3布局
无特殊要求。
5.3.4安装位置
5.3.4.1横向:在基准轴线方向上,离车辆纵向对称平面最远的视表面上的点到车辆外缘端面的距离应 不大于400 mm。
5.3.4.2 高度:
最小值:离地高度不小于250 mm。
最大值:对于Ml和NI类车辆,离地高度不大于800 mm;对于除EG(越野)的其他车辆,离地高度 不大于1 200 mm;对于N,G(越野)车辆,离地高度不大于1 500 mm。
在基准轴线方向上,前雾灯整个视表面应在近光灯视表面最高点以下。
5.3.4.3纵向:装在车前。要求该灯的发射光不直接或间接地通过后视镜(间接视野装置)或车辆其他 反射面,而引起驾驶员的不舒适感。
5.3.5几何可见度
由3.15定义的α和S角来确定。α角向上、向下均为5°β角:向外45°、向内10°。
前雾灯的灯具部分或其附近其他部件,不应反射前雾灯发岀的光,造成其他使用道路者的不舒适。
5.3.6方向
5.3.6.1垂直方向
5.3.6.1.1对于B级前雾灯,其明暗截止线的垂直向倾斜度,在车辆空载且驾驶座上有一个乘员的情况 下应不大于一1.5%。
5.3.6.1.2对于F3前雾灯:
a) 当单侧光源总目标光通量不大于2 000 Im时:明暗截止线垂直向倾斜度,在车辆空载且驾驶 座上有一个乘员的情况下应不大于一1.0%。
b) 当单侧光源总目标光通量大于2 000 Im时:
1) 取决于前雾灯基准轴线方向上的视表面下边缘的安装高度(犺),测量在空载车辆上进行, 明暗截止线的垂直向倾斜度在附录A规定的所有静态下,应保持在下列范围内:
犺 ≤08 m 限值:一1.0% 〜一3.0%
初始照准:—1.5% 2.0%
h>0.8 m 限值:—1.5% 〜一3.5%
初始照准:一2.0%〜一2.5%
2) 车辆空载且驾驶座上有一个乘员的情况下的初始明暗截止线向下倾斜度,由制造商以不 大于0.1%的精度进行规定,并以清晰且不易抹去的方法在每个前雾灯或制造商铭牌或按 5.2.6.1.1的指示,以附录F中的符号进行注明。向下倾斜度的数值应按5.3.6.1.2 b)1) 定义。
5.3.6.2前雾灯调光装置
5.3.6.2.1若前雾灯安装调光装置,无论是独立的还是与其他前照明装置和光信号装置组合。在附录 A规定的所有装载条件下,该前雾灯的垂直倾角应在5.3.6.1.2 b)1)规定的范围内。
5.3.6.2.2若F3前雾灯属于近光灯或AFS系统的一部分,在前雾灯作为近光灯部分使用时,应符合 5.2.6要求。在这种情况下5.2.6规定的垂直向倾斜度限值应对该情况下的前雾灯适用。
5.3.6.2.3调光装置可以调整前雾灯光束倾斜度以自动适应周围环境,以保证5.3.6.1.2 b)1)规定的垂 直向倾斜度限值。
5.3.6.2.4在调光装置故障的情况下,前雾灯光束的明暗截止线应不会保持在高于故障时的位置。
5.3.6.2.5若车辆结构能保证在附录A规定的所有装载情况下,均能符合5.3.6.1.2 b)l)要求,允许不 安装调光装置,但其前雾灯应具有调节明暗截止线高度的装置。
5.3.6.3安装方向
朝前。
5.3.7电路连接
前雾灯应能独立于远光灯、近光灯或任何远近光组件打开或关闭,除非:
a) 前雾灯在AFS系统中作为另一种照明功能的一部分;然而,前雾灯的开启,应优先于AFS中 前雾灯所属的其他功能;或
b) 前雾灯按GB 4660要求,不能和与其混合的其他灯具同时点亮。
5.3.8指示器
应配备接通指示器。采用独立的非闪烁信号。
5.3.9其他要求
对于F3类前雾灯的校准和发光强度可自动适应普遍环境状态的情况。应自动对任何照度变化或 照准进行调节,且不会引起驾驶员或其他使用道路者的不舒适。
5.4倒车灯(符合GB 15235要求的灯具)
5.4.1配备
汽车和。2、。3和。4类挂车应配备。Ol类挂车选装。 家
5.4.2数量
5.4.2.1对于Mi类和长度不大于6 000 mm的所有其他车辆,应配备一只,选装一只。
5.4.2.2除了 Mi类车辆外,对于长度大于6 000 mm的所有车辆应配备两只,选装两只。
5.4.3布局
无特殊要求。
5.4.4安装位置
5.4.4.1横向:无特殊要求。
5.4.4.2高度:离地高度不小于250 mm,不大于1 200 mm。
5.4.4.3纵向:安装在车辆尾部。然而,对于5.4.2.2规定的两只选装倒车灯,可以允许安装在车辆侧 面,且符合5.4.5.2和5.4.6要求。
5.4.5几何可见度
5.4.5.1对于安装在车辆尾部的倒车灯,由3.15定义的α和月角来度量。
α角:向上15°,向下5°。
月角:向左、向右均为45°( 一只倒车灯),向外45°,向内30°(两只倒车灯)。
5.4.5.2对于根据5.4.2.2在车侧面安装的选装倒车灯,其基准轴线与车辆纵向对称平面所成角度不大 于15°,即可认为满足几何可见度要求。选装的两只倒车灯垂直方向上允许直接向下照射。
5.4.6方向
向后。此外,对于根据5.4.2.2在车侧面安装的选装倒车灯,应符合5.4.5.2要求。
5.4.7电路连接
5.4.7.1只有当倒车齿轮处于啮合状态或驱动系统处于倒车状态,而且发动机(推进系统)的点、熄火控 制装置处于使发动机(推进系统)能工作的状态时,倒车灯才能打开,否则无法打开。
5.4.7.2此外,对于根据5.4.2.2选装的两只倒车灯,其电路连接应保证只有当4.11规定的灯具打开 后,才可以开启。
满足以下条件,安装在车辆侧方的倒车灯在车辆前行速度小于10 km/h时可作为慢行灯:
——应配备独立的开关手动开启和关闭;
——作为慢行灯功能,在倒车齿轮松开后可继续保持点亮;
——独立开关无论处于何位置(开启或关闭),当车辆前行速度大于10 km/h时,灯具应自动关闭, 且在此情况下,灯具应保持关闭状态直至再次满足开启要求而开启。
5.4.8指示器
选装。
5.4.9其他要求
5.5转向信号灯(符合GB 17509要求的灯具) 5.5.1配备
应配备。如图2 a)。
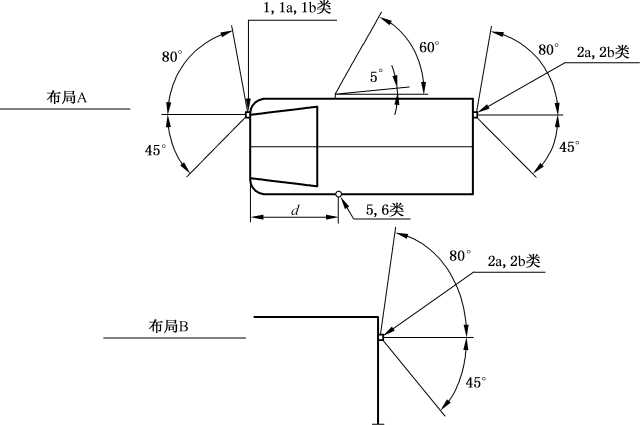
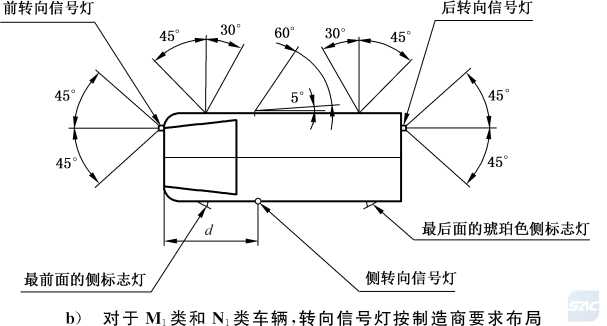
转向信号灯可分为下列类别(1、1a、1b、2a、2b、5及6),通过在车辆上的安装可构成布局A和布局BO 布局A适用于各种汽车,布局B只适用于挂车。
犪)布局
图2转向信号灯布局
说明:
图2 a)中的布局A:侧转向灯的后部几何可见度死角值上限为5°,H≤1.8O m(对于MI和NI类型车辆犱≤2.50 m)。 对于离地高度不大于750 mm[测量方法参照4.8 a)]的l、la、lb、2a和2b类转向灯,在H平面下方的向内几何可见度角 可由45°减至20°。
图2 b):侧转向灯的后部几何可见度死角值上限为5°,犱≤2.50 m。
图2 (续)
5.5.2数量
按布局。
5.5.3布局[见图2犪)]
5.5.3.1 布局 A:
两只下列种类的前转向灯:
——1或Ia或Ib类:若在基准轴线方向上,该转向信号灯的视表面边缘与相邻近光灯或前雾灯的 视表面边缘间距离不小于40 mm;
---Ia或Ib类:若上述Iw距为大于20 mm,小于40 mm;
--Ib类:若上述间距不大于20 mm。
两只后转向灯(2a或2b类):对于M2、M3、N2和N3类车辆,可以选装两只2a或2b的后转向灯。
两只5类或6类侧转向灯(最低要求):
——5类侧转向灯适用于Mi类车辆;以及长度不大于6 m的Ni、M2和M3类车辆;
——6类侧转向灯适用于N2和N3类车辆;以及长度大于6 m的Ni、M2和M3类车辆;
——在所有情况下,允许使用第6类侧转向信号灯代替第5类。
当配备的转向信号灯兼有前转向信号灯(1、1a、1b类)和侧转向信号灯(5或6类)功能时,为满足 5.5.5几何可见度要求可以再配备两只附加的侧转向信号灯(5或6类)。
5.5.3.2布局B:两只后转向灯(2a或2b类)。
对于。2、。3和O4类车辆,可选装两只后转向信号灯(2a或2b类)。
长度大于9 m的O2类车辆每侧,最多可选装三只5类侧转向灯或选装一只6类侧转向灯。
如果安装了 AFS,转向灯类别的选择所要考虑的距离应为前转向信号灯与最相邻的近光功能单元 间的距离。
5.5.3.3此外,以下车辆适用下述规定,但如果车辆有三只及以上的侧标志灯与同侧的转向信号灯同时 闪烁,则下述规定不适用:
——长度大于6 m且不大于9 m的M2、M3、巨和N3类车辆,可选装一只5类附加灯具;
——长度大于9 m的M2λM3^N2和N3类车辆,每侧强制安装三只5类附加灯具,且尽可能在每侧 均匀布置;
——。3和0’类车辆,每侧强制安装三只5类附加灯具,且尽可能在每侧均匀布置。
554安装位置
5.5.4.1 横向
在基准轴线方向上,离车辆纵向对称平面最远的视表面边缘,到车辆外缘端面之间的距离应不大于 400 mm。本条件不适用于选装的后转向信号灯。
在基准线方向上,两相邻视表面内边缘之间的距离应不小于600 mm。
若车辆宽度小于1 300 mm,上述间距离可减至400 mm。
5.5.4.2离地高度
5.5.4.2.1第5或第6类转向灯透光面的离地高度,从最低点测量,对于Mi类和Ni类车辆应不小于 350 mm,对于其他类车辆,应不小于500 mm,从最高点测量应不大于1 500 mm。
5.5.4.2.2 1、1a、1b、2a和2b类转向灯的离地高度,按4.8规定测量时应不小于350 mm,且不大于 1500 mm。
5.5.4.2.3若车型结构不能保证上述的诸离地高度上限,且没有安装选装后转向灯。则第5和第6类 侧转向灯为不大于2 300 mm,第1、1a、1b、2a和2b类转向灯为不大于2 100 mm。
5.5.4.2.4选装灯的安装,在兼顾横向安装位置(5.5.4.1)、灯具对称性和车身形状的情况下,应位于尽 可能高处,与必须配备灯具间的垂直距离应不小于600 mm。
5.5.4.3纵向[见图2 a)]
侧转向灯(5和6类)透光面到标志车辆全长前边界的横向平面的距离应不大于1 800 mm。然而, 对于Mi类和Ni类,该距离可增至为不大于2 500 mm。其他类车辆车型结构不能保证最小几何可见度 角时,该距离也可增至为不大于2 500 mm。
选装的5类侧转向灯应沿车辆的长度方向上均匀间隔安装。
选装的6类侧转向万应在拖车长度方向上的第一个和最后一个四分位之间的区域内安装。
5.5.5几何可见度
5.5.5.1水平方向角度:如图2 a)布局A和布局BO
垂直方向角:对于1、1a、1b、2a、2b和5类转向灯为水平面上、下各15°。
对于离地高度小于750 mm的灯具[测量方法参照4.8a)],则水平面以下的垂直方向角可由15°减 至5°。
若于选装灯的离地高度不小于2 100 mm[测量方法参照4.8 a)],则水平面以上的垂直方向角可由 15°减至5°。
对于第6类转向信号灯:水平面上30°,水平面下5°。
5.5.5.2或者,按制造商要求,对于M1类和N1类车辆,前、后转向信号灯和侧标志灯的几何可见度:
——水平方向角:见图2 b)。对于离地高度不大于750 mm[测量方法参照4.8 a)]的1、1a、1b、2a 和2b类转向灯,在H平面下方的向内几何可见度角可由45°减至20°。
——垂直方向角:水平面上、下各15°。若离地高度小于750 mm[测量方法参照4.8 a)],则向下几 何可见度角可由15°减至5°。
——为了保证可见,除了第5和第6类侧转向信号灯外,其他灯的无障碍观察的视表面应不小于
12.5 cm"不包括任何不透光的回复反射器发光面)。对于符合4.29规定的灯具不适用。
5.5.6方向
按制造商规定安装。
5.5.7电路连接
转向信号灯的开关应独立于其他灯具。在车辆同一侧的所有转向信号灯,应由一个开关控制同时 打开或关闭,并同步闪烁。
对于符合5.5.5.2规定,长度小于6 m的Mi类和N车辆,琥珀色的侧标志灯(若安装)应以与转向 信号灯相同的频率同相闪烁。
5.5.8指示器
1、1a、1b、2a和2b类转向信号灯应配备工作指示器。其可以是指示灯(视觉的)或发声器(听觉 的),或者两者兼有。若是指示灯应是闪烁的,当前或后转向信号灯任一发生故障时,该指示灯或熄灭, 或不再闪烁,或以另一种明显不同的频率闪烁。若为发声器应响声清晰,发生故障时至少声频应明显 变化。
指示器故障报警条件应符合GB 17509规定。
对于牵有挂车的汽车,除非汽车上的指示器能够显示岀车辆组合上每个转向信号灯的故障,否则应 配备一种专用于显示挂车上转向信号灯工作状况的指示灯。
汽车和挂车上的选装转向灯,不强制安装工作指示器。
5.5.9其他要求
闪光频率为(90 + 30)次∕mιn0
起动光信号开关后,在不大于1s时间内发光,在1 S〜1.5 S时间内首次熄灭。
对于牵有挂车的汽车,牵引车上的转向信号灯控制开关,应能控制挂车上的转向信号灯。
若某一转向信号灯发生故障(短路除外)时,其他转向信号灯应继续工作,但闪光频率可以不同于上 述规定的频率。
5.6危险警告信号
5.6.1配备
应配备。危险警告信号应由符合5.5规定的转向信号灯同时工作发岀。
5.6.2数量
按5.5.2规定。
5.6.3布局
按5.5.3规定。
5.6.4安装位置
5.6.4.1 横向:按 5.5.4.1 规定。
5.6.4.2 高度:按 5.5.4.2 规定 O
5.6.4.3 纵向:按 5.5.4.3 规定。
5.6.5几何可见度
按5.5.5规定。
5.6.6方向
按5.5.6规定。
5.6.7电路连接
5.6.7.1危险警告信号应由单独配置的手动开关打开各转向信号灯,并同步闪烁。
5.6.7.2在车辆发生碰撞或5.23规定的紧急制动信号关闭后,危险警告信号允许自动开启。在这种情 况下,应能够手动关闭该信号。
此外,危险警告信号允许自动开启,以向其他道路使用者指示可能存在的危险。此时,该信号应保 持开启直至被手动或自动关闭。
5.6.7.3对于长度小于6 m的Ml和Nl类车辆,其布局符合5.5.5.2规定,若装有琥珀色侧标志灯,则该 灯也应以与转向信号灯相同的频率同相位闪烁。
5.6.8指示器
应配备闪烁接通指示器。
5.6.9其他要求
按5.5.9规定,对于牵有挂车的汽车,危险警告信号控制开关也应能打开挂车上的所有转向信号 灯,即使在发动机控制装置处于无法启动的情况下,应仍能发岀危险警告信号。
5.7制动灯(符合GB 5920要求的灯具)
5.7.1配备
SI或S2类制动灯,各类车辆应配备。
S3或S4类制动灯,M1,N1类车辆(带有驾驶室的底盘和带有开式货舱的NI类型车辆除外)和多用 途货车应配备,其他类车辆选装。
注:多用途货车是指具有长头车身和驾驶室结构、核定乘坐人数小于或等于5人(含驾驶人)、驾驶室高度小于或等 于2 100 mm、货箱栏板上端离地高度小于或等于1 500 mm、最大设计总质量小于或等于3 500 kg的货车。
5.7.2数量
5.7.2.1对于各类车辆,S1或S2类制动灯两只、S3或S4类制动灯一只。
5.7.2.2安装S3或S4类制动灯的情况除外,M,、M,、N2、N3、。2、。3和0」类车辆可以安装两只选装的 Sl或S2类制动灯。
5.7.2.3当车辆的纵向对称平面不位于固定的车身板而是位于可移动部件上,隔开车辆的一或两个可 移动部件(如车门),而且在纵向对称平面上的移动部件又无足够的空间安装一只S3或S4类制动灯,则 可以安装两只“D”型S3或S4类制动灯;或在向左、向右偏离车辆纵向对称平面位置上,安装一只S3或 S4类制动灯;或安装S3或S4类制动灯的互存灯系统。
5.7.3布局
无特殊要求。
5.7.4安装位置
5.7.4.1 横向
对于MJ和NJ类车辆:S1或S2类制动灯,在基准轴线方向上离车辆纵向对称平面最远的视表面上 的点,到车辆外缘端面之间的距离应不大于400 mm;对沿基准轴线方向上的视表面的各个内边缘之间 的距离无特殊要求。
对于其他所有车辆:
——Sl或S2类制动灯:在基准轴线方向上视表面内边缘间的距离应不小于600 mm。若车宽小于 1 300 mm,可减至 400 mm。
——S3或S4类制动灯:其基准中心应位于车辆的纵向对称平面。然而,对于按5.7.2规定,安装两 只S3或S4类制动灯的情况,则要求两灯尽量靠近车辆纵向对称平面,并分别位于车辆纵向对 称平面的两侧。
——对于按5.7.2规定,安装一只S3或S4类制动灯,且偏离车辆纵向对称平面的情况,灯具基准 中心不得偏离车辆纵向对称平面超过150 mm。
5.7.4.2 高度
5.7.4.2.1对于S1或S2类制动灯
离地高度应不小于350 mm,不大于1 500 mm。若未安装选装灯具,车型结构不能保证在 1 500 mm内,则可增至2 100 mm。
若安装了选装灯具,应按灯具宽度和对称性要求,以及车身结构尽可能高的垂直距离定位高度,使 其位于应强制安装的灯具以上,且距离不小于600 mm。
5.7.4.2.2对于S3或S4类制动灯
与其视表面下边缘相切的水平面,应不低于与后窗玻璃下边缘相切的水平面150 mm,或其离地高 度不小于850 mm。
然而,与S3或S4类制动灯视表面下边缘相切的水平面,应高于与S1或S2类制动灯视表面上边缘 相切的水平面。
5.7.4.3 纵向
对于S1或S2类制动灯:在车辆尾部。
对于S3或S4类制动灯:在车辆尾部。
5.7.5几何可见度
5.7.5.1水平方向角
对于S1或S2类制动灯:车辆纵向轴线左、右各45°。
然而,对于离地高度不大于750 mm:测量方法参照4.8 a)]的S1和S2类制动灯,在H平面下方的 向内几何可见度角可由45°减至20°。
对于S3或S4类制动灯:车辆纵向轴线左、右各10°。
5.7.5.2垂直方向角
对于S1或S2类制动灯:水平面上、下各15°,以下情况除外:
——对于离地高度小于750 mm的灯具[测量方法参照4.8 a)],则水平面以下的垂直方向角可由 15°减至5°;
——若于选装灯的离地高度不小于2 100 mm[测量方法参照4.8 a)],则水平面以上的垂直方向角 可由15°减至5°。
对于S3或S4类制动灯:水平面上10°,水平面下5°。
5.7.6方向
朝后。
5.7.7电路连接
5.7.7.1当使用符合GB 12676或GB 21670规定的行车制动装置时,所有制动灯应同时点亮。
5.7.7.2如果发动机(推进系统)的点、熄火控制装置使发动机推进系统)处于非工作状态,则不要求制 动灯行使功能。
5.7.8指示器
选装。若配备,则应是一种非闪烁的报警工作指示灯,当制动灯发生故障时,该指示灯点亮。
5.7.9其他要求
5.7.9.1 S3或S4类制动灯不应与其他任何灯混合。
5.7.9.2 S3或S4类制动灯可以安装在车辆外部或内部。
若安装在车内,要求其发射光不应通过后视镜(间接视野装置)或车辆的其他表面(如后窗玻璃),而 引起的驾驶员的不舒适感。
5.8后牌照板照明装置(符合GB 18408要求的灯具)
5.8.1配备
应配备。
5.8.2数量
根据牌照板的照明要求而定。
5.8.3布局
根据牌照板的照明要求而定。
5.8.4安装位置
横向、高度、纵向均根据牌照板的照明要求而定。
5.8.5 几何可见度
根据牌照板的照明要求而定。
5.8.6方向
根据牌照板的照明要求而定。
5.8.7电路连接
按4.11要求。
5.8.8指示器
选用。若配备,其功能应由前、后位置灯指示器完成。
5.8.9其他要求
当牌照灯与后位灯复合且与制动灯或后雾灯混合时,则在制动灯或后雾灯点亮期间,牌照灯的光度 特性可以改变。
5.9前位灯(符合GB 5920要求的灯具)
5.9.1配备
汽车和宽度大于1 600 mm的挂车应配备。宽度不大于1 600 mm的挂车允许选装。
5.9.2数量
两只。
5.9.3布局
无特殊要求。
5.9.4安装位置
5.9.4.1横向:在基准轴线方向上,离车辆纵向对称平面最远的视表面上的点,到车辆外缘端面的距离, 应不大于400 mm。
对于挂车,上述间距应不大于150 mm。
在基准轴线方向上,两视表面内边缘间的距离:对于M1和N1类车辆无特殊要求;对于其他车辆应 不小于600 mm,若车宽小于1 300 mm,上述间距可减至400 mm。
5.9.4.2高度:离地高度不小于250 mm,不大于1 500 mm。对于01和0类车辆,或者,若车型结构不 能保证在1 500 mm内的其他类车辆,可增至2 100 mm。
5.9.4.3纵向:无特殊要求。
5.9.4.4当前位灯与其他灯混合时,应使用其他灯在基准轴线方向上的视表面来验证是否满足 5.9.4.1〜5.9.4.3的安装位置要求。
5.9.5几何可见度
5.9.5.1水平方向角:向内45°,向外80。。
然而,对于离地高度不大于750 mm[测量方法参照4.8 a)]的灯具,在H平面下方的向内几何可见 度角可由45。减至20。。
对于挂车,向内的水平方向角可减至5。。
垂直方向角:为水平面上、下各15。。对于离地高度小于750 mm的灯具[测量方法参照4.8 a)],则 水平面以下的垂直方向角可由15。减至5。。
5.9.5.2对于M1和N1类车辆,若安装前侧标志灯,则可由制造商决定,采用以下要求代替5.9.5.1 规定:
——水平方向角:向内45°,向外45。。然而,对于离地高度不大于750 mm[测量方法参照4.8 a)]的 灯具,在H平面下方的向内几何可见度角可由45°减至20°。
——垂直方向角:水平面上、下各15°。然而,对于离地高度小于750 mm的灯具[测量方法参照
4.8 a)],则水平面以下的垂直方向角可由15°减至5°。
为保证可见,灯的无障碍观察的视表面应不小于12.5 cm2 (不包括任何不透光的回复反射器的发 光面)。
5.9.6方向
朝前。
5.9.7电路连接
按4.11规定。前位灯与转向灯混合时,在转向信号灯开启的整个周期(包括点亮和熄灭整个过程) 中,对应一侧的前位灯或其混合部分允许保持关闭。
5.9.8指示器
应配备接通指示器。该指示器应是非闪烁的,若仪表灯只能与前位灯同时开关,则可省去。当光信 号系统按5.2.7.6 b)规定运行时,上述要求不适用。
在符合4.11e)的情况下,可以选装一个单独的接通指示器,且应避免与前位灯的指示器混淆。
5.9.9其他要求
5.9.9.1如果一只或多只红外线发生器安装于前位灯内,其只有当同侧前照灯开启且车辆前行时才可 打开。如果前位灯或同侧的前照灯发生故障,红外线发生器应自动关闭。
5.9.9.2对于安装有弯道照明功能的AFS,前位灯允许与混合的照明单元一同转动。
5.10后位灯(符合GB 5920要求的灯具)
5.10.1配备
后位灯应配备。
5.10.2数量
两只。
M2、M3、N2、N3、。2、。3和。4类车辆可以安装两只选装的后位灯,已安装示廓灯的情况除外。
5.10.3布局
无特殊要求。
5.10.4安装位置
5.10.4.1横向:在基准轴线方向上,离车辆纵向对称平面最远的视表面上的点到车辆外缘端面的距离 应不大于400 mm。此规定不适用于选装的后位灯。
在基准轴线方代上,两视表面内缘间的距离:
——对于Mi和Ni类车辆,无特殊要求;
——对于其他类车辆,应不小于600 mm,若车宽小于1 300 mm,则该距离可减至为不小于 400 mm。
5.10.4.2高度:离地高度不小于350 mm,不大于1 500 mm,若未安装选装灯具,车型结构不能保证在 1 500 mm内,则可增至2 100 mm;若安装了选装灯具,其高度应与5.10.4.1规定相适应,并按灯具对称 性要求,以及车身结构尽可能高的垂直距离定位高度,使其位于强制安装的灯具以上,且距离不小于 600 mm。
5.10.4.3纵向:位于车辆尾部。
5.10.5几何可见度
5.10.5.1水平方向角:向内45°,向外80。。
然而,对于离地高度不大于750 mm[测量方法参照4.8 a)]的灯具,在H平面下方的向内几何可见 度角可由45。减至20。。
垂直方向角:水平面上、下各15°,以下情况除外:
——对于离地高度小于750 mm的灯具[测量方法参照4.8 a)],则水平面以下的垂直方向角可由 15。减至5°;
——若于选装灯的离地高度不小于2 100 mm[测量方法参照4.8 a)],则水平面以上的垂直方向角 可由15。减至5。。
5.10.5.2对于M1和N1类车辆,若安装后侧标志灯,则可由制造商决定,采用以下要求代替5.10.5.1 规定:
——水平方向角:向内、向外各45。。然而,对于离地高度不大于750 mm[测量方法参照4.8 a)]的 灯具,在H平面下方的向内几何可见度角可由45。减至20。。
——垂直方向角:水平面上、下各15。。然而,对于离地高度小于750 mm的灯具[测量方法参照
4.8 a)],则水平面以下的垂直方向角可由15。减至5。。
为保证可见,灯的无障碍观察的视表面应不小于12.5cm2(不包括任何不透光的回复反射器发光 面)。对于符合4.29规定的灯具不适用。
5.10.6方向
朝后。
5.10.7电路连接
按4.11规定。然而,后位灯与转向灯混合时,在转向灯开启的整个时期(包括点亮和熄灭整个过 程),对应一侧的后位灯或其混合部分可以保持关闭。
5.10.8指示器
应配备接通指示器,并应由前位灯的指示器完成。
当光信号系统按5.2.7.6 b)规定运行时,上述要求不适用。
在符合4.11 e)的情况下,可以选装一个单独的接通指示器,且应避免与后位灯的指示器混淆。
5.10.9其他要求
无。
5.11后雾灯(符合GB 11554要求的灯具)
5.11.1配备
应配备。
5.11.2数量
一只或两只。
5.11.3布局
无特殊要求。
5.11.4安装位置
5.11.4.1横向:若只配备一只后雾灯,则应安装在车辆前进方向的左侧,或其基准中心位于车辆纵向对 称平面上。
5.11.4.2高度:离地高度不小于25Omm,不大于1 000 mm。对于N3G类(越野)车辆或后雾灯与任何 车尾灯具组合的情况,最大离地高度可增至1 200 mm。
5.11.4.3纵向:在车辆尾部。
5.11.5几何可见度
由3.15定义的α和月角来度量。α角:向上、向下均为5°β角:向左、向右均为25°。
5.11.6方向
朝后。
5.11.7电路连接
5.11.7.1只有当远光灯、近光灯或前雾灯打开时,后雾灯才能打开。
5.11.7.2后雾灯可以独立于任何其他灯具而关闭。
5.11.7.3应满足以下两个要求之一:
——后雾灯可以连续工作,直至位置灯关闭时为止。之后,一直处于关闭状态,直至再次打开。
——除了必须配备的指示器外(5.11.8),应至少配备一种声音报警装置,无论5.11.7.1规定的灯具 开着与否,当点火开关关闭或点火钥匙取岀,其驾驶室门未关时,当后雾灯开关在“开启”位置 时,给岀报警信号。
5.11.7.4除了 5.11.7.1,5.11.7.3和5.11.7.5要求外,后雾灯的工作应不受其他任何灯具开、关的影响。 5.11.7.5当牵引机动车连接有挂车,且挂车后雾灯已打开时,该牵引机动车后雾灯允许自动关闭。
5.11.8指示器
应配备接通指示器,该指示器是一种独立的非闪烁警告指示灯。
5.11.9其他要求
在同时点亮的情况下,后雾灯与各制动灯的间距应大于100 mm。
5.12驻车灯(符合GB 18409要求的灯具)
5.12.1配备
长度不大于6 m和宽度不大于2 m的汽车选装,其他车辆不应安装。
5.12.2数量
根据布局而定。 零
5.12.3布局
车前和车后各两只,或车辆两侧各一只。
5.12.4安装位置
5.12.4.1横向:在基准轴线方向上,离车辆纵向对称平面最远的视表面上的点,到车辆外缘端面的距离 应不大于400 mm。
对于安装两只驻车灯的情况,其应安装在车辆两侧。
5.12.4.2高度:对于Ml和Nl类车辆,无特殊要求。
对于其他车辆,离地高度不小于350 mm,不大于1 500 mm。若车型结构不能保证在1 500 mm 内,则可增至为2 100 mm。
5.12.4.3纵向:无特殊要求。
5.12.5几何可见度
水平方向角:向外、向前和向后均为45°。
然而,对于离地高度不大于750 mm[测量方法参照4.8 a)]的灯具,在H平面下方的向内几何可见 度角可由45°减至20°。
垂直方向角:水平面上、下各为15°。
对于离地高度小于750 mm的灯具[测量方法参照4.8 a)],则水平面以下的垂直方向角可由15°减 至5°。
5.12.6方向
应满足向前和向后的可见度要求。
5.12.7电路连接
车辆同侧的驻车灯应可以独立于其他任何灯具而开启。驻车灯以及若采用符合5.12.9要求的前 位灯和后位灯,即使当发动机(推进系统)的点、熄火控制装置处于使发动机(推进系统)无法工作的状态 时,也应能进行操作。不应使用自动关闭这些灯具的装置(如计时关闭装置)。
5.12.8指示器
接通指示器选装。若选装,不应与前、后位灯的指示器混淆。
5.12.9其他要求
驻车灯的功能可由同时打开车辆同一侧的前、后位灯来实现。在此情况下,若灯具满足前或后位灯 的要求,则视为满足驻车灯的要求。
5.13示廓灯(符合GB 5920要求的灯具)
5.13.1配备
宽度大于2.10 m的车辆应配备。宽度介于1.80 m〜2.10 m的车辆选装。带驾驶室的底盘选装后 示廓灯。
5.13.2数量
车前两只,车后两只。可以再选装两只前示廓灯和/或两只后示廓灯。
5.13.3布局
无特殊要求。
5.13.4安装位置
5.13.4.1 横向
前和后:尽量靠近车辆的外缘端面。当在基准轴线方向上,离车辆纵向对称平面最远的视表面上的 点到车辆外缘端面间的距离不大于400 mm时,认为满足该要求。
5.13.4.2 高度
前:对于汽车,在基准轴线方向上,与视表面上边缘相切的水平面,应不低于与挡风玻璃上边缘相切 的水平面。
对于挂车和半挂车,在考虑车宽,设计和操作要求,以及灯的对称性的情况下,尽可能达到最大 高度。
后:在考虑车宽,设计和操作要求,以及灯的对称性的情况下,尽可能达到最大高度。
在考虑车宽,设计和操作要求,以及灯的对称性的情况下,选装灯具和强制性安装灯具(如适用)的 安装应在适当高度,且相互间的纵向间距应尽可能大。
5.13.4.3 纵向
无特殊要求。5.13.4.2规定的选装前示廓灯,安装应尽可能靠近车辆尾部。该附加灯具和车辆尾 部之间的距离不应大于400 mm。
5.13.5几何可见度
星 水平方向角:向外80°
譲 垂直方向角:水平向上5°,向下20°
5.13.6方向
满足朝前或朝后可见度要求。
5.13.7电路连接
按4.11规定。
5.13.8指示器
选用。若选用,其功能应由前、后位灯指示器完成。
5.13.9其他要求
在满足所有规定要求的前提下,位于车辆同侧的车前示廓灯和(强制安装或选装的)车后示廓灯,可 以复合成一种装置。
两只后示廓灯按4.7规定可以组合、复合或混合。
示廓灯与相应位置灯的相对位置要求如下,即在两灯各自的基准轴线方向上,视表面上最相邻的点 在一横向垂直平面内的投影间距应不小于200 mm。
5.14非三角形后回复反射器(符合GB 11564要求的灯具)
5.14.1配备
汽车应配备。挂车可以选装与其他后信号装置组合的非三角形后回复反射器。
5.14.2数量
两只。其性能应符合IA类或IB类回复反射器的要求。只要不损害必须配备的照明和光信号装置 的有效性,允许安装和使用附加的回复反射器和回复反射材料。
5.14.3布局
无特殊要求。
5.14.4安装位置
5.14.4. 1横向:离车辆纵向对称平面最远的发光面上的点到车辆外缘端面间的距离应不大于 400 mm。
在基准轴线方向上,回复反射器两视表面内边缘间的距离:
对于Ml和Nl类车辆,无特殊要求;
对于其他类车辆,应不小于600 mm,若车宽小于1 300 mm,则该间距可为不小于400 mm。
5.14.4.2高度:离地高度不小于250 mm,不大于900 mm。若与车尾灯具组合可增至1 200 mm。若 车型结构不能保证在900 mm或1 200 mm内,可增至1 500 mm。
5.14.4.3纵向:装在车后。
5.14.5几何可见度
水平方向角:向内、向外各30°。
垂直方向角:水平面上、下各10°。对于离地高度小于750 mm的回复反射器[测量方法参照
4.8 a)],则水平面以下的垂直方向角可由10°减至5°。
5.14.6方向
朝后。
5.14.7其他要求
回复反射器的发光面可与车辆尾部的其他灯的视表面部分共有。
5.15三角形后回复反射器(符合GB 1 1564要求的灯具)
5.15.1配备
挂车应配备。汽车不应安装。
5.15.2数量
两只。其性能应符合EA类或KB类回复反射器的要求。只要不损害必须配备的照明和光信号装 置的有效性,允许安装和使用附加的回复反射器和回复反射材料(包括两只不符合5.15.4要求的回复 反射器)。
5.15.3布局
三角形顶端应朝上。
5.15.4安装位置
5.15.4.1横向:离车辆纵向对称平面最远的发光面上的点到车辆外缘端面间的距离应不大于400 mm。 回复反射器内边缘的距离应不小于600 mm,若车宽小于1 300 mm,则该距离可减至为不小于400 mm。
5.15.4.2高度:离地高度不小于250 mm,不大于900 mm。若与车尾灯具组合可增至1 200 mm。若 车型结构不能保证在900 mm或1 200 mm内,可增至1 500 mm。
5.15.4.3纵向:装在车辆尾部。
5.15.5几何可见度
水平方向角:向内、向外各30°。
垂直方向角:水平面上、下各15°。对于离地高度小于750 mm的回复反射器[测量方法参照
4.8 a)],则水平面以下的垂直方向角可由15°减至5°。
5.15.6方向
朝后。
5.15.7其他要求
回复反射器的发光面可与车辆尾部的其他灯的视表面部分共有。
5.16非三角形前回复反射器(符合GB 1 1564要求的灯具)
5.16.1配备
挂车和所有带反光镜的朝前灯具全部为可藏灯的车辆应配备;其他车辆选装。
5.16.2数量
两只。其性能应符合IA类或IB类回复反射器的要求,只要不损害必须配备的照明和光信号装 置的有效性,允许安装和使用附加的回复反射器和回复反射材料(包括两只不符合5.16.4要求的回复 反射器)。
5.16.3布局
无特殊要求。
5.16.4安装位置
5.16.4.1横向:离车辆纵向对称平面最远的发光面上的点到车辆外缘端面间的距离应不大于400 mm; 对于挂车,该距离应不大于150 mm。
在基准轴线方向上,回复反射器两视表面内边缘间的距离:
——对于M1和N1类车辆,无特殊要求;
——对于其他类车辆,应不小于600 mm,若车宽小于1 300 mm,则该距离可减至为不小于 400 mm。
5.16.4.2高度:离地高度不小于250 mm,不大于900 mm。若车型结构不能保证在900 mm内,可增 至 1 500 mm。
5.16.4.3纵向:装在车辆前部。
5.16.5几何可见度
水平方向角:向内、向外各为30。。对于挂车,向内的水平方向角可减至10°。若由于挂车的结构, 必须配备的回复反射器不能满足上述角度要求,则应安装不受横向安装位置要求(5.16.4.1)限制的附加 (补充)回复反射器,它们与必须配备的回复反射器一起,应满足必需的可见度角要求。
垂直方向角:水平面上、下各10°。对于离地高度小于750 mm的回复反射器[测量方法参照
4.8 a)],则水平面以下的垂直方向角可由10。减至5。。
5.16.6方向
朝前。
5.16.7其他要求
回复反射器的发光面可与装在车辆前部的其他灯具视表面部分共有。
5.17非三角形侧回复反射器(符合GB 11564要求的灯具)
5.17.1配备
长度大于6 m的汽车和所有挂车应配备。长度不大于6 m的汽车可以选装。
5.17.2数量
满足纵向定位要求。其性能应符合IA类或IB类回复反射器要求。只要不损害必须配备的照明和 光信号装置的有效性,允许安装和使用附加的回复反射器和回复反射材料(包括两只不符合5.17.4要 求的回复反射器)。
5.17.3布局
无特殊要求。
5.17.4安装位置
5.17.4.1横向:无特殊要求。
5.17.4.2高度:离地高度不小于250 mm,不大于900 mm。若回复反射器与任何灯具组合,可增至 1 200 mm。若车型结构不能保证在900 mm或1 200 mm内或按5.17.1要求非强制安装,可增 至 1 500 mm。
5.17.4.3纵向:在车辆的中间三分之一范围内至少安装一只侧回复反射器,最前面的侧回复反射器离 车辆前端不大于3 m。
相邻两侧回复反射器间的距离应不大于3 m。本规定不适用M1和N1类车辆。
若车型结构、设计或车辆操作造成不能满足上述要求,则该间距可增至4 m。最后面的侧回复反射 器离车辆后端应不大于1 m。然而,对于车长不大于6 m的汽车,在车辆总长的前和/或后三分之一范 围内,配备一只侧回复反射器即满足要求。
对于车长大于6 m但不大于7 m的M】类车辆,在离车辆前部3 m内以及后三分之一范围内各安 装一只侧回复反射器,即满足要求。
5.17.5几何可见度
水平方向角:向前和向后各45。。
垂直方向角:水平面上、下各IoOO若离地高度小于750 mm[测量方法参照4.8 a)],则水平面以下 的垂直方向角可减至5°。
5.17.6方向
朝向侧面。
5.17.7其他要求
侧回复反射器的发光面可与装在车辆侧面其他灯的视表面部分共有。
5.18侧标志灯(符合GB 18099要求的灯具)
5.18.1配备
除了带驾驶室底盘外,长度大于6 m的车辆应配备。
SMI类侧标志灯适用于各类车辆;SM2侧标志灯可适用于Ml类车辆。
此外,在长度小于6m的Ml和Nl类车辆上,可使用侧标志灯来补充前位灯和后位灯不足的几何可 见度,使之符合各自的规定(5.9.5.2和5.10.5.2)。
其他类车辆可以选装SM1或SM2侧标志灯。
5.18.2每侧的最少数量
满足纵向定位要求。
5.18.3布局
无特殊要求。
5.18.4安装位置
5.18.4.1横向:无特殊要求。
5.18.4.2高度:离地高度不小于250 mm,不大于1 500 mm。若车型结构不能保证1 500 mm内,则可 增加至2 100 mm。
5.18.4.3纵向:至少有一只侧标志灯应安装在车辆的中间三分之一范围内,最前面的侧标志灯离车辆 前端不大于3 m;两相邻侧标志灯的间距应不大于3 m,若车型结构、设计或车辆操作使其不能保证在 3 m内,则可增至4 m。
最后面的侧标志灯离车辆后端应不大于1m。
然而对于车长不大于6 m的车辆和带驾驶室底盘,在车辆长度的前和/或后三分之一范围内,安装 一只侧标志灯即满足要求。对于车长大于6 m但不大于7 m的M1类车辆,在离车辆前部3 m内以及 后三分之一范围内各安装一只侧回复反射器,即满足要求。
5.18.5几何可见度
水平方向角:向前和向后各为45。。对于选装侧标志灯的车辆,该角度可减至30。。
若车辆上安装了用来补充前、后转向信号灯和/或前、后位灯不足的几何可见度的侧标志灯,使之符 合各自的规定(5.5.5.2,5.9.5.2和5.10.5.2),则指向车辆前、后端的角度为45。,指向车辆中间部分的角 42
度为30°O
垂直方向角:水平面上、下各10°o对于离地高度小于750 mm的灯具[测量方法参照4.8 a>],则水 平面以下的垂直方向角可由10°减至5°。
5.18.6方向
朝向侧面。
5.18.7电路连接
在长度小于6 m的Mi和Ni类车辆上,琥珀色侧标志灯可以与车辆同一貝转向信号灯以相同的 频率,同相位闪烁。对M八M3、N八N3、。3和。4类车辆,强制安装的琥珀色侧标志灯可以与车辆同侧的 转向信号灯同频,同相闪烁。但是,如果车辆侧面按5.5.3.3安装有5类侧转向灯,则这些侧标志灯不应 闪烁。对于其他类车辆,无特殊规定。
5.18.8指示器
选装。若安装,其功能应由前、后位灯指示器完成。
5.18.9其他要求
当最后面的侧标志灯与后位灯复合,该后位灯与后雾灯或制动灯混合时,则在打开后雾灯或制动灯 期间,侧标志灯的配光性能允许改变。
若与后转向灯一同闪烁,后侧标志灯应为琥珀色。
5.19昼间行驶灯(符合GB 23255要求的灯具)
5.19.1配备
汽车选装。挂车不应安装。
5.19.2数量
两只。
5.19.3布局
无特殊要求。
5.19.4安装位置
5.19.4.1横向:在基准轴线方向上,两视表面内缘间的距离应不小于600 mm,若车宽小于1 300 mm, 则该距离可减至为不小于400 mm。
5.19.4.2高度:离地高度不小于250 mm,不大于1 500 mm。
5.19.4.3纵向:装在车辆前部。若发射光不直接或间接地通过后视镜(间接视野装置)和/或车辆其他 反射表面,引起驾驶员的不舒适感,即满足要求。
5.19.5几何可见度
水平方向角:向外、向内各20°。
垂直方向角:向上、向下各10°。
5.19.6方向
朝前。
5.19.7电路连接
5.19.7.1当发动机(推进系统)的点、熄火控制装置处于允许启动发动机(推进系统)的状态时,昼间行 驶灯应能自动开启。然而,以下情况昼间行驶灯允许保持关闭:
--车辆自动挡在驻车位置;或
--驻车制动器在开启位置;或
——手动操作推进系统后车辆第一次启动前。
5.97.2当车速低于IO km/h,昼间行驶灯允许手动关闭,在此情况下若车速高于10 km/h或车辆已 行驶超过100 m且保持行驶状态时,昼间行驶灯应自动开启直至再次关闭。
5.19.7.3当发动机(推进系统)的点、熄火控制装置处于发动机(推进系统)无法工作状态或前雾灯或前 照灯开启(发岀间歇的警告除外)时,昼间行驶灯应自动关闭。
5.19.7.4昼间行驶灯开启时,允许4.11规定的灯具开启。昼间行驶灯按5.2.7.6 b)规定至少点亮后位 灯的情况除外。
5.19.7.5若前转向灯和昼间行驶灯间距不大于40 mm,则转向灯工作时,同侧的昼间行驶灯允许采取 下列操作之一:
——关闭;或
——在转向信号灯开启的整个周期(包括点亮和熄灭整个过程)中,降低发光强度。
5.19.7.6若转向灯与昼间行驶灯混合,则转向灯工作时,同侧的昼间行驶灯在转向信号灯开启的整个 周期(包括点亮和熄灭整个过程)中应至少关闭与转向灯的混合部分。
5.19.8指示器
接通指示器选装。
5.19.9其他要求
无。
5.20角灯(符合GB/T 30511要求的灯具)
5.20.1配置
汽车选装。
5.20.2数量
两只。
5.20.3布局
无特殊要求。
5.20.4安装位置
5.20.4.1横向:两只角灯分别安装在车辆纵向对称平面的两侧。
5.20.4.2纵向:离车辆前部不超过1 000 mm。
5.20.4.3 高度:
最小值:离地高度不小于250 mm。
最大值:离地高度不大于900 mm。
在基准轴线方向上,整个视表面应在近光灯视表面最高点以下。
5.20.5几何可见度
α角:向上、向下均为10。;
S角:向夕卜30°至60°。
5.20.6方向
应满足几何可见度要求。
5.20.7电路连接
5.20.7.1只有远光灯或近光灯打开时角灯才允许打开。
5.20.7.2车辆一侧的角灯,只有车辆同一侧的转向信号打开时和/或方向盘转向角向同侧转向时才允 许自动打开。当转向信号关闭和/或转向角恢复直行后,角灯应自动关闭。
5.20.7.3当倒车灯打开时,两只角灯可独立于方向盘或转向信号灯,而同时打开,当倒车灯关闭时或车 辆向前行驶速度超过10 km/h时,角灯应关闭。
5.20.8指示器
无。
5.20.9其他要求
车速超过40 km/h时,不应打开角灯。
5.21醒目标志
S 汽车及挂车车身反光标识的安装按GB 23254相关要求。
车辆尾部标志板的安装按GB 25990相关要求。
5.22自适应前照明系统(AFS)(符合GB/T 30036-2013要求的灯具)
5.22.1配备
汽车选装,挂车不应安装。
5.22.2数量
一套。
5.22.3布局
无特殊要求。
5.22.4位置
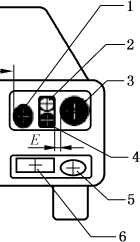
5.22.4.1横向和高度:按制造商描述,为特定照明功能或功能模式要求同时点亮的那些照明单元,应满 足以下规定,所有测量依据基准轴线方向上照明单元视表面的最近边缘确定:
a) 两个对称安装的照明单元,其高度应符合5.1.4和5.2.4要求。“对称安装的照明单元”指两个 照明单元,车辆每一侧各安装一个,其视表面的(几何)重心或中心应位于同一高度,距车辆纵 向对称平面的距离相同,单边误差在50 mm范围内。其透光面、发光面和光束可以不相同。
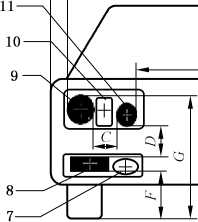
b) 若配有附加的照明单元,其与相邻照明单元之间的最大水平距离不应超过140 mm,若附加照 明单元为“对称安装的照明单元”,该距离不应超过200 mm(见图3中的E);其与上或下相邻 照明单元之间的垂直距离不应超过400 mm(见图3中的D)O
C) 5.22.4.1 b)提及的附加照明单元,安装高度不应低于250 mm(见图3中的犉),符合5.2.4.2的 最大离地高度要求(见图3中的G)。
d)横向上,还应满足下述要求:对近光照明的每个模式,车辆每一侧,应至少有一个照明单元视表 面上的外边缘与车辆外缘端面间的距离不大于400 mm(见图3中的厶)。且,基准轴线方向 上,两视表面内边缘间的距离不应小于600 mm,该要求不适用于Mi和Ni类车辆,对于宽度小 于1 300 mm的其他类型车辆,该距离可以降至400 mm。
A
|
为实现给定的照明模式而同时点亮的照明单元: 3和9:两只对称配置的照明单元; 1和11:两只对称配置的照明单元; 4和8:两只附加的照明单元。 为实现给定的照明模式而不点亮的照明单元: |
水平向的距离(mm): AW400; B≥600或当车宽V1 300 mm时B≥400,不适用M】类和 N1类车; CW200; |
|
2和10:两只对称配置的照明单元; 5:附加照明单元; 6和7:两只对称配置的照明单元。 |
E≤140° 垂直向的距离(mm): D≤400; F≥250: G≤1 200° |
图3 AFS照明单元
5.22.4.2纵向:AFS的所有照明单元,应安装在车辆前部。发射的光不应直接或间接通过后视镜(间 接视野装置)和/或车辆的其他反射面,引起驾驶员的不适,即认为满足本条要求。
5.22.4.3在进行5.22.4.1〜5.22.4.2试验时,AFS应已设置为中性状态。
5.22.5几何可见度
对于车辆每一侧的照明功能和模式,各功能和模式按制造商规定同时开启的照明单元中,至少有一 个照明单元符合5.1.5和5.2.5的几何可见度要求。单个的照明单元可用于符合不同的几何可见度 要求。
5.22.6方向
注:下述5.22.6.1〜5.22.6.4要求适用于中性状态下的基础近光。
5.22.6.1垂直方向
5.22.6.1.1制造商应按0.1%的准确度,在驾驶座上一名人员的空载条件下,规定基础近光明暗截止线 的初始下倾度,并按附录F规定的符号,将此数值标注在车辆前照明系统上或制造商铭牌附近,并确保 此标记清晰持久。
对于不同照明单使用不同初始下倾度共同合成基础近光明暗截止线的情况,制造商应按0.1%的准 确度,将此各数值标注在相应照明单元上或制造商铭牌附近一一对应。
5.22.6.1.2基础近光明暗截止线的水平部分,其下倾度应保证在附录A规定的所有装载情况下,均在 5.2.6.1.2的相应限值范围内,包括初始照准也应满足相应要求。
对于近光由不同照明单元不同光束共同形成的情况,5.22.6.1.2要求应分别对各个光束“截止线”参 照 GB/T 30036—2013 中 8.3.1 b)8)进行检测 O
5.22.6.2前照灯调光装置
5.22.6.2.1用于执行5.22.6.1.2要求的前照灯调光装置应该是自动的。
5.22.6.2.2若调光装置失效,近光的下倾位置不应高于发生故障时的位置o
5.22.6.3水平方向
投射在测量屏幕上的每一照明单元的明暗截止线(若有)肘部,应位于穿过该照明单元基准轴的垂 直线上。对右侧允许有0.5°的偏差。其他照明单元调节应按制造商规定,并在资料文件中明确。
5.22.6.4测量程序
光束方向初始调整完成后,近光的下倾度或按5.22.6.2.1基础近光由不同照明单元共同形成的明 暗截止线的下倾度,在车辆所有装载情况下,应符合5.2.6.3.1和5.2.6.3.2要求。
5.22.6.5安装方向
向前。
5.22.7电路连接
5.22.7.1 AFS提供的远光
5.22.7.1.1远光照明单元允许同时或成对点亮。当由近光切换远光时,至少应点亮远光的一对照明单 元。当远光切换近光时,所有远光照明单元应同时关闭。
5.22.7.1.2对于自适应远光,按5.22.9.3规定,控制信号应由可探测下列各项情况并对其作岀反应的 传感器系统产生:M
——环境光线条件;
——迎面驶来的车辆上,前部照明装置和前部光信号装置发岀的光线;
——前方行驶车辆的尾部光信号装置发岀的光线。
允许安装额外的可提升性能的传感器功能。
本条中的“车辆”指L、M、N、O类车,并认为这些车辆配备了回复反射器,且照明和光信号装置已 经开启。
5.22.7.1.3在任何情况下,远光灯的自适应功能应能手动打开或关闭,且自动控制功能应能够手动关 闭。此外,远光灯和其自动控制功能的关闭方式应是简单和迅速的手动操作,一次完成。
5.22.7.1.4远光灯打开时,允许近光灯也开着。
5.22.7.1.5当安装四只可藏式照明单元时,其上升位置应防止任何只是用于在昼间发岀间歇光信号 (4.12)的附加前照灯同时工作。
5.22.7.2近光照明
切换至近光灯时,应关闭所有远光灯功能或远光灯功能的所有AFS照明单元。
近光允许随远光同时处于开启状态。
气体放电光源的近光照明单元,在远光灯打开时,也应保持打开。
5.22.7.3近光灯开关自动控制
近光灯的开启和关闭允许自动控制,且应满足4.12的电路连接要求。
5.22.7.4 AFS的自动执行要求
5.22.7.4.1 AFS功能的级别和模式相互(级别间或模式间)的切换应是自动的,且不应对驾驶员或道路 其他使用者产生不适、眩目或分散注意力。在其他级别模式的近光未被激活的情况下,应开启C级模 式的近光。
5.22.7.4.2 V级近光模式的激活条件:自动检测到一个或多个下述状况,适用V信号:
——建筑物密集区域道路,且车速未超过60 km/h;
——有固定照明的道路,且车速未超过60 km/h;
——路面亮度持续超过1 cd∕m2,或/且水平路面照度持续超过10 lx;
--车速未超过50 km/hO
5.22.7.4.3 E级近光模式的激活条件:车速超过60 km/h,且自动检测到一个或多个下述状况:
——车辆处于高速道路(指道路具有降低会车眩目的措施,如道路中间隔离带或会车横向安全距离 等),或车速超过110 km∕h(适用E信号);
——按申请人认证文件描述,近光的E模式符合GB/T 30036-2013中附录D的D.7的数据集:
• 数据集E1:车速超过100km∕h(适用E1信号);
• 数据集E2:车速超过90 km/h(适用E2信号);
• 数据集E3:车速超过80 km/h(适用E3信号)。
5.22.7.4.4 W级近光模式的激活条件:前雾灯处于关闭状态,且自动检测到一个或多个下述状况(适用 W信号):
——潮湿路面已被自动探测到;
--挡风玻璃雨刮已开启,且连续或自动控制的操作已持续2 min以上。
5.22.7.4.5 C,V,E或W模式对应弯道照明功能的激活条件:满足对应模式的激活条件,且对下列至少 一种特性(或等效条件)进行了评估(T信号和对应的模式信号组合使用):
——转向锁角;
——车辆重心轨迹。
此外,应符合下列要求:
——只有当车辆向前行驶,且过明暗截止线肘部的纵向垂直平面与行驶车辆重心轨迹交点,距离车 辆不大于照明单元安装高度的100倍,才允许使用非对称的明暗截止线偏离车辆纵向轴的水 平移动的弯道照明功能(对车辆右转时产生的弯道照明,本条款不适用)。
——只有当行驶车辆重心轨迹曲率水平半径不大于500 m时,才允许使用附加光源的弯道照明 功能。
5.22.7.5驾驶员中性模式切换
在任何情况下,驾驶员应能随时将AFS调至中性状态,或恢复至自动操作模式。
5.22.8指示器
5.22.8.1符合远光灯(5.1.8)和近光灯(5.2.8)要求。
5.22.8.2强制安装AFS失效指示器。该指示器不应闪烁。当探测到AFS控制信号故障或接受到不 符合AFS规定的信号时,应开启失效指示器,且保持工作。失效指示器可以暂时关闭,但当开启或关闭 发动机的装置被开启或关闭时,其应再次启动。
5.22.8.3如果使用自适应远光,应开启一个视觉指示器表明自适应远光已经开启,并在其工作期间,指 示器持续点亮。
5.22.9其他要求
5.22.9.1清洗器要求
当GB/T 30036-2013中8.3.1 b)中的8)定义的明暗截止线区域内,车辆两侧提供的基础主近光 的AFS照明单元,包括所有提供基础主近光的照明单元,其左右两侧光源总目标光通量之和超过 4 000 Im时,AFS应配备符合GB 21260要求的前照灯清洗器。
5.22.9.2 AFS系统自动操作的一致性检查
5.22.9.2.1制造商应提供一致性检查文件,至少包括以下内容:
a) AFS控制信号的文件:
1) 已获批准的AFS系统的照明功能和模式;
2) 近光的类型模式和相关的AFS控制信号;
3) 系统功能模式适用5.22.7.4对应的条款;
4) 对光源检查和光束的目视观察的专门说明(若有);
5) 组合或复合或混合于AFS系统的灯具;
6) 符合5.22.5几何可见度的照明单元。
b) 符合5.22.7.4.1〜5.22.7.4.5自动操作要求的相关文件。
5.22.9.2.2为检查近光功能AFS的自动操作是否会引起不舒适以及5.22.7.4要求,应根据制造商描 述,对所有描述的系统控制条件进行路试。验证所有的模式是否按制造商描述被激活,运行或停止,系 统是否岀现有争议的故障(例如,过角度移动或颤动等)。
5.22.9.2.3按检测机构要求或使用证明文件形式,演示完整的自动操作过程。此外,至少上应提供文 件,表明系统“安全理念”上的措施。这里的“安全理念”指系统已包含的安全策略,例如采用应急系统, 保证电子或机械故障引起驾驶员、会车或前车不舒适,注意力分散或眩目时,采取安全措施。该描述应 对“系统”的所有控制功能,实现方式,包括控制执行原理进行简单的解释。
提供系统输入和采集的变量列表,并标明其规定的工作范围。以及其退至基础近光功能(C级)运 行的安全理念。
制造商应对系统功能和安全理念的表述进行解释。文件应简短,对相关设计和开发应使用该领域 的专业术语证明其益处。
为周期技术核查的需要,应提供文件说明“系统”当前操作状态如何检测。
本文件作为一致性检查的参考资料。
5.22.9.2.4为检查自适应远光功能作是否会引起驾驶员、会车或前车不舒适,注意力分散或眩目,应按 附录E的E.2要求进行路试。路试应包括制造商描述的所有系统控制条件。对自适应远光的所有功 能应根据制造商描述进行核查,并确认系统是否岀现有争议的故障(例如,过角度移动或颤动等)。
5.22.9.3自适应远光
按5.22.7.1.2要求的自适应远光,其传感器系统的要求如下:
a) 按5.22.7.1.2要求,传感器对其他车辆所发光线侦测的最小范围边界角应符合5.1.9.3.1.1的 要求。
b) 传感器灵敏度应符合5.1.9.3.1.2要求。
C)当环境照明大于7 OOO IX时,自适应远光灯应关闭。
制造商应使用模拟或其他方法向检测机构演示产品对以上条款的符合性。若有必要,应使用带有 余弦修正的照度计,在和车辆传感器相同高度位置测量水平照度。允许使用检测机构认可的方式,用文 件或其他方式,证明本条的符合性。
5.22.9.4远光最大发光强度限值
远光照明或远光模式(若有)中,所有同时开启的照明单元,最大发光强度值之和不应超过 43O OOO CdO测量方法参照5.1.9.2要求O
5.22.9.5 AFS功能附加要求
如未另行规定,AFS功能的相关装置也应满足本标准中的远光灯(5.1)和近光灯(5.2)的要求o
5.23紧急制动信号
5.23.1配备
选装。
紧急制动信号应由5.23.7规定的所有制动灯或转向灯的同时启动来实现。
5.23.2数量
按5.5.2或5.7.2要求。
5.23.3布局
按5.5.3或5.7.3要求。
5.23.4安装位置
按5.5.4或5.7.4要求o
5.23.5几何可见度
按5.5.5或5.7.5要求o
5.23.6方向
按5.5.6或5.7.6要求o
5.23.7电路连接
5.23.7.1发岀紧急制动信号的所有灯具,闪烁频率要求如下:
a) 以(4.O士 1.O)Hz频率同相闪烁。
b) 然而,如果车尾发岀紧急制动信号的任何灯具使用灯丝灯泡,其闪烁频率应在4.O i1.o HZ范
5O
围内。
5.23.7.2紧急制动信号应独立于其他灯具工作。
5.23.7.3紧急制动信号应自动启动和解除,且:
a) 紧急制动信号应仅在车速高于50 km/h并且制动系统发岀GB 12676或GB 21670规定的紧 急制动逻辑信号时启动。
b) 紧急制动信号应在GB 12676或GB 21670规定的紧急制动逻辑信号不再发岀或危险警告信 号被启动时自动解除。
5.23.8指示器
选装。
5.23.9其他要求
5.23.9.1除5.23.9.2中描述的情况,如果车辆搭载有拖车装备时,车辆上的紧急制动信号的控制器也 应能够操作拖车上的紧急制动信号。
当车辆与拖车有电路连接时,组合的紧急制动信号的工作频率应限制在5.23.7.1 b)中规定的范围 内。但是,如果车辆可以探测到拖车上的紧急制动信号不使用灯丝灯泡,则频率可以按5.23.7 a)规定 的范围。
5.23.9.2如果车辆附带有符合GB 12676定义的连续或半连续行车制动系统的拖车,应保证在实施行 车制动时,通过电力连接供给拖车制动灯持续稳定的电力。
任何此类拖车的紧急制动信号可以独立于实施拖拽的车辆单独工作,且不要求与实施拖拽的车辆 的紧急制动信号同频同相运作。
5.24牵引杆挂车标志灯(图4)
5.24.1配备
牵引杆挂车应安装。其他车辆不应安装。
5.24.2数量
两只。
5.24.3布局
无特殊要求。
5.24.4安装位置
5.24.4.1横向:离车辆纵向对称平面最远的视表面上的点到挂车外缘端间的距离应小于150 mm。
5.24.4.2高度:比牵引杆挂车的前挡板高岀300 mm〜400 mm。
5.24.4.3纵向:位于挂车前部。
5.24.5几何可见度
无特殊要求。
5.24.6方向
白色发光面面向车辆前方,红色发光面面向车辆后方。
5.24.7电路连接
按4.11规定O
5.24.8指示器
选装。若安装,其功能应由前、后位灯指示器完成。
5.24.9其他要求
牵引杆挂车标志灯对应方向上的最大发光强度,应符合GB 5920中前示廓灯和后示廓灯的发光强 度要求。
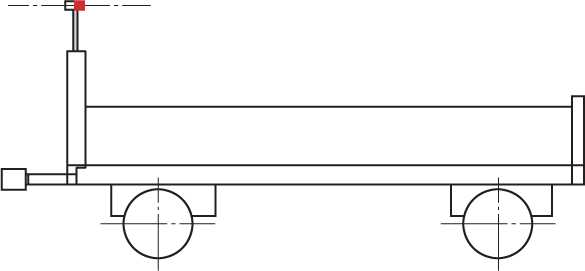
图4牵引杆挂车标志灯
5.25慢行灯
5.25.1配备
选装。
5.25.2数量
一只或两只(每侧一只)o
5.25.3布局
无特殊要求,按5.25.9规定。
5.25.4位置
无特殊要求。
5.25.5几何可见度
无特殊要求。
5.25.6方向
向下,按5.25.9规定。

5.25.7电路连接
慢行灯应在近光灯或远光灯开启的情况下点亮。
符合以下任一条件时,允许慢行灯在车辆慢速行驶时自动开启直至车速达到IO km/h。
——手动启动发动机(推进系统)后,车辆首次启动之前;或
——当倒车齿轮处于啮合状态;或
——用于辅助停车操作系统摄像头开启。
当车辆前行速度大于IO km/h时,慢行灯应自动关闭,直至满足上述条件后才可再次开启。
5.25.8指示器
无特殊要求。
5.25.9其他要求
5.25.9.1在目视检测时,观察者在附录I规定区域边界范围(区域由距车前IO m的横向平面、距车后 IO m的横向平面,以及距车辆两侧各IOm的2个纵向平面组成,高度为1 m〜3 m)内移动,应无法直 接看到灯具的视表面。
5.25.9.2若灯具符合GB 15235中慢行灯配光要求,则可通过图纸或模拟或视同的方式来验证是否符 合5.25.9.1要求。
5.26追尾警告信号
5.26.1配置
选装。追尾警告信号通过同时点亮5.26.7中的所有转向信号灯具实现。
5.26.2数量
按5.5.2规定。
5.26.3布局
按5.5.3规定。
5.26.4位置
按5.5.4规定。
5.26.5几何可见度
按5.5.5规定。
5.26.6 方向
按5.5.6规定。
5.26.7电路连接
5.26.7.1所有追尾警告信号应按(4.O士LO)HZ的频率同步闪烁。然而,若车辆尾部的追尾警告信号 存在使用灯丝灯泡光源的灯具,则闪烁频率应为4.O 1.o HZO
5.26.7.2追尾警告信号应独立于其他灯具进行操作。
5.26.7.3追尾警告信号的开启和关闭应是自动的。
5.26.7.4在转向信号灯功能,危险警告信号功能或紧急制动信号功能开启的情况下,追尾警告信号应 无法开启。
5.26.7.5追尾警告信号只有符合表7情况下才能开启。
表7追尾警告信号开启条件
|
狏 |
激活条件 |
|
狏> 30 km/h |
TTC≤1.4 S |
|
狏r≤ 30 km/h |
TTC≤1∙4s× 狏r _________________ ≤ 30 km/h_________________ |
|
注1: ^r(ReIatiVe SPeed——相对速度)指发出追尾警告信号的车辆与其同车道尾随车辆的速度差。 注2: TTC(Time to COIIiSiOn-碰撞时间)指在相对速度(狏r)假设保持不变的情况下,发出追尾警告信号的车辆与 _____其同车道尾随车辆将发生碰撞的预估时间。______________________________ | |
5.26.7.6追尾警告信号作用时间不得超过3 SO
5.26.7.7申请人可通过模拟或检测机构认可的方式进行演示,证明对5.26.7.1〜5.26.7.6要求的符 合性。
5.26.8指示器
选装。
6检验规则
6.1同一型式判定及检验
6.1.1照明和光信号装置安装相关的车辆型式的同一性,按3.2定义。
6.1.2符合6.2或6.3规定的,则认为通过就外部照明和光信号装置的安装数量和方式对某一种车型 的型式检验或一致性检验。
6.2型式检验
6.2.1某种车型照明和光信号装置的型式检验申请,应由该车型制造商提交并附下述文件资料:
a) 一份有关车型的外形和尺寸、各种装置安装数量和位置、前照灯调光系统和悬挂系统的说明 书,并说明限定装就盘,特别是行李箱的最大装载量。
b) 一份由制造商规定的照明和光信号装置表格。在该表格内,对每种功能可以列岀几种型式的 装置;每种型式应给岀适当标记(如已经通过型式检验的,则标明国家或国际认证标志,制造商 名称等)。此外,对于每种功能可另有备注,注明其等效装置。
C) 一份照明和光信号装置的整体安装图,标明各装置在车辆上的安装位置,电性能参数以及可移 动部件和相应灯具的相对位置。
d) 一套能显示每种灯具发光面、透光面、基准轴线和基准中心的外形图,以及一份有关视表面确 定方法的说明,牌照灯除外。
e) 按本标准要求,需由制造商提供的证明文件(例如与前照灯自动开启关闭以及AFS功能相关 文件)。
6.2.2应提交型式检验车型的空载车辆一辆,其上装有整套照明和光信号装置。按第4章和第5章进 行检验,并符合相应要求。
6.3生产一致性检验
6.3.1每辆通过型式检验的车辆,其照明和光信号装置的安装及其特性,按第4章和第5章进行检验, 应与型式检验的车型一致。
6.3.2对连续生产的具有通过本标准型式检验的车辆,应进行随机抽查。
6.4车辆照明和光信号装置的变动和扩充
经型式检验后,车辆型式或照明和光信号装置的变动和扩充,应通过型式检验的管理部门,由该部 门决定是否确认。
7实施日期
7.1本标准实施之日起,新申请型式批准的车型应符合本标准。
7.2对于已获得型式批准的车型若不涉及照明和光信号装置安装的改变,给予直至停产的过渡期。
7.3本标准4.17的要求,对新申请型式批准的车型,标准实施之日后24个月内,应按4.17 a)或 4.17 b)的要求实施,标准实施之日24个月之后,应按4.17 a)要求。
7.4本标准5.2.7.6的要求,对新申请型式批准的车型,标准实施之日后36个月内,应按照5.2.7.6 a) 和/或5.2.7.6 b)和/或5.2.7.6 C)的要求实施,标准实施之日36个月之后,应至少满足5.2.7.6 a)的 要求。
附录A
(规范性附录)
确定近光光束在垂直方向上变化的各种装载状况
A.1乘员
在以下试验中,每个乘员的计算重量为75 kg。
A.2不同车型的装载状况
A.2.1 Mi类车辆
A.2.1.1应在以下装载状况下,确定近光光束的角度:
--个驾驶员。
--个驾驶员,离驾驶员最远的前排座位上一个乘员。
--个驾驶员,离驾驶员最远的前排座位上一个乘员,最后排的所有座位均坐满乘员。
--全部座位均坐满乘员。
——全部座位均坐满乘员,加上行李箱内均匀分布的装载,由此达到后轴或前轴(若行李箱设置在 前面)的允许轴荷。若车辆前、后各有一个行李箱,则行李箱内的装载应恰当分布,以便达到各 车轴的允许轴荷。若在达到车轴之一的允许轴荷之前,就超岀最大允许装载质量,则应限制行 李箱的装载量,以保证不超岀最大允许装载质量。
--个驾驶员,加上行李箱内均匀分布的装载,由此达到相应车轴的允许轴荷。若在达到车轴之 一的允许轴荷之前,就超岀最大允许装载质量,则应限制行李箱的装载量,以保证不超岀最大 允许装载质量。
A.2.1.2在确定上述装载状况时,应考虑制造商对装载状况的限制说明。
A.2.2犕2类和犕3类车辆
应在以下承载状况下,确定近光光束的角度:
——车辆空载,一名人员坐在驾驶座上;
——车辆装载,使每根车轴都达到其最大技术允许轴荷;或者对前、后轴按其最大技术允许轴荷之 比例进行加载,直至达到最大允许装载质量,以先达到者为准。
A.2.3具有装载面的N类车辆
应在以下装载状况下,确定近光光束的角度:
——车辆空载,一名人员坐在驾驶座上;
--个驾驶员,其装载量的分布应使后轴(或数根后轴)达到最大技术允许轴荷,或最大允许装载 质量,以先达到者为准,条件是不超岀前轴的轴荷。该轴荷是按照空载车辆的前轴轴荷,加上 前轴上最大允许有效轴荷的25% ;当装载面位于车前面时,前轴的承载状况如此考虑。
A.2.4无承载面的N类车辆
A.2.4.1半挂牵引车
应在以下承载状况下,确定近光光束的角度:
——没有与挂车连接的空载车辆,驾驶座上有一名人员;
——驾驶座上有一名人员,在牵引车连接件上施加技术允许载荷,连接件应位于使后轴达到最大轴 荷的位置。
A.2.4.2全挂牵引车
——车辆空载,一名人员坐在驾驶座上;
——驾驶座上有一名人员,驾驶室内的其余座位上均有乘员。
A.3近光光束在垂直方向上变化
按 5.2.6.1 和 5.2.6.3.1。
附录B
(资料性附录)
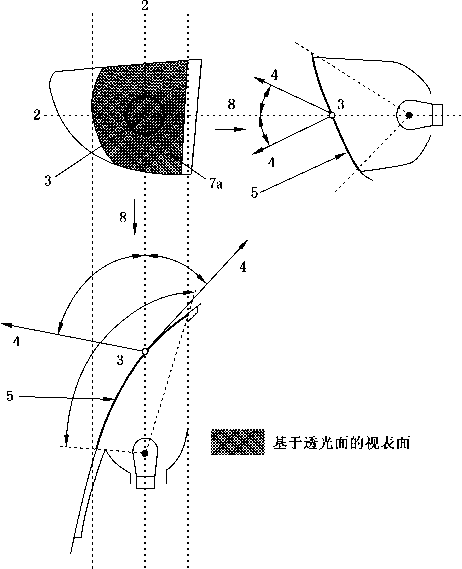
灯具的面、基准轴和基准中心、几何可见度角的示例
B. 1概述
本附录给岀的示例以帮助理解本标准中相关内容为目的,不作为灯具设计时的约束。
B.2本附录的关键词
见表B.l0
表B.1本附录关键词及图示中的对应编号
|
编号 |
关键词 |
|
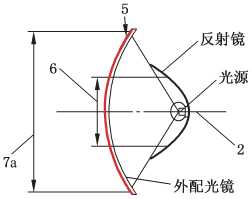
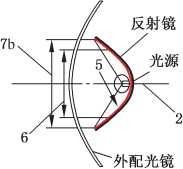
l |
发光面 |
|
2 |
基准轴线 |
|
3 |
基准中心 |
|
4 |
几何可见度角 |
|
5 |
透光面 |
|
6 |
基于发光面的视表面 |
|
7a |
基于透光面的视表面3,lO a)(考虑有纹理外配光镜) |
|
7b |
基于透光面的视表面3,lO b)(不考虑外无纹理配光镜) |
|
8 |
观察方向 |
B.3灯具的面、基准轴和基准中心,以及几何可见度的示例
B.3.1光信号装置(除回复反射器)的透光面示例
示例:
B.3.2光信号装置的发光面(除回复反射器)示例
示例:
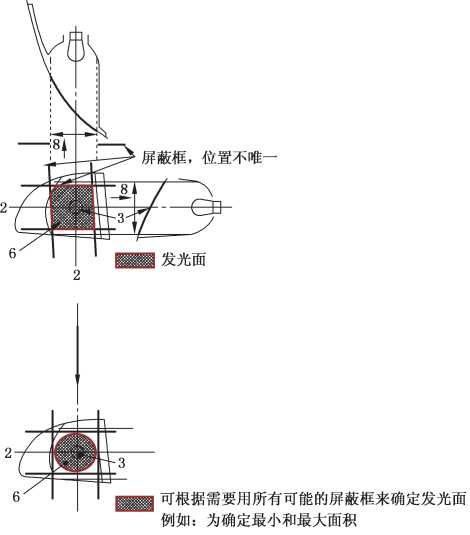
屏蔽框,位置不唯一
可根据需要用所有可能的屏蔽框来确定发光面 例如:为确定最小和最大面积
B.3.3不同几何可见度方向上基于发光面的视表面示例
示例:
B.3.4不同几何可见度方向上基于透光面的视表面示例
示例:
2
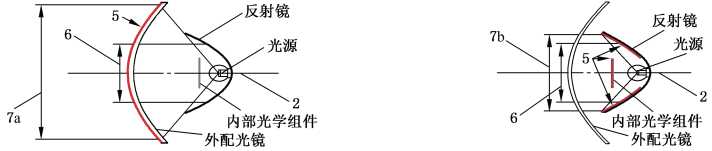
B.3.5单功能灯的发光面和透光面示例(见3.10〜3.11)
B.3.5.1光源带有反射镜,并配有外配光镜的示例O
示例1:外配光镜有纹理
示例2:不考虑无纹理外配光镜
B.3.5.2光源带有反射镜,并配有外配光镜和内配光镜的示例o
示例1:外配光镜有纹理
示例2:不考虑无纹理外配光镜
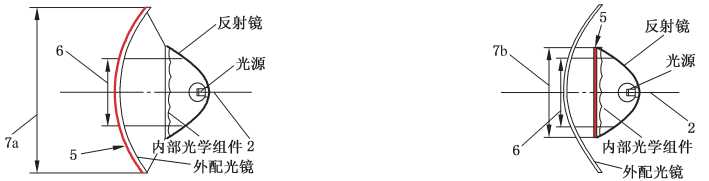
B.3.5.3光源带有反射镜,并配有外配光镜和局部内配光镜的示例o
示例1:外配光镜有纹理
示例2:不考虑无纹理外配光镜
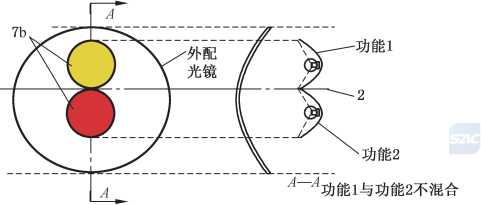
B.3.5.4外配光镜后配有光导管的示例o
示例:
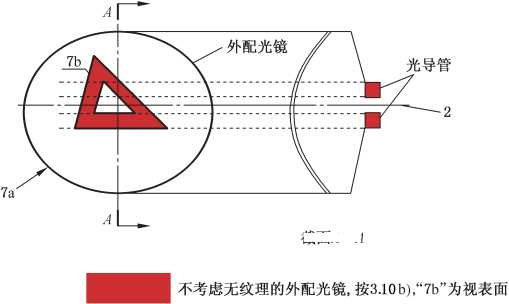
截面
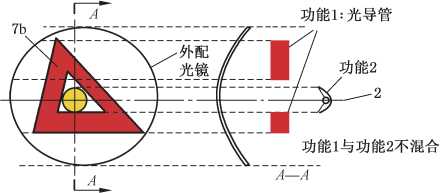
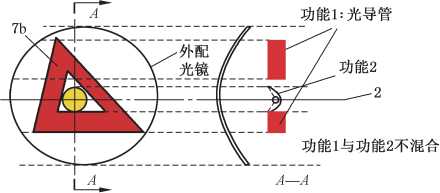
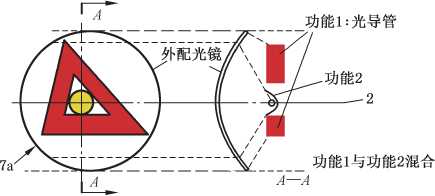
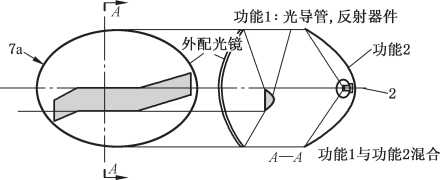
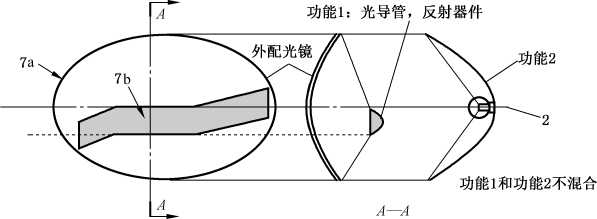
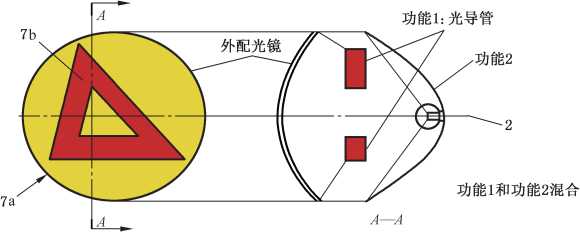
B.3.5.5外配光镜后的光导管或反射器件的示例O
示例:
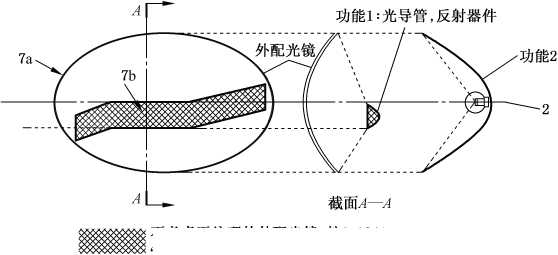
不考虑无纹理的外配光镜,按3. IO b) “7b”为视表面,功能2的光无法穿透功能1
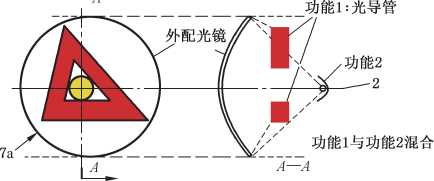
B.3.5.6带有反射镜的光源,且外配光镜后有非本功能部分的示例。
示例:
B.3.6透光面和发光面示例
B.3.6.1透光面和发光面示例o
示例1:
示例2:
B.3.6.2带有非本功能部分情况下的发光面示例O
示例:
B.3.6.3带有非本功能部分情况下的透光面3.10 a)示例O 示例:
B.3.6.4配光镜无纹理,且带有非本功能部分情况下的视表面3.10 b)示例o 示例:
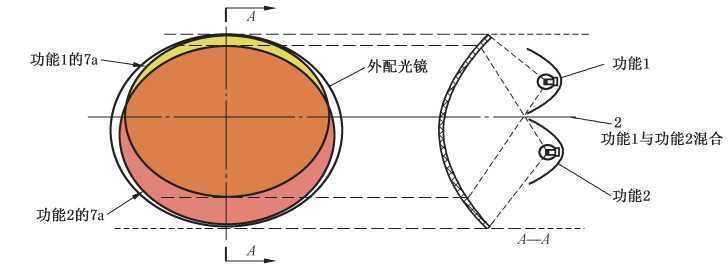
B.3.7确定两个功能是否相互混合的示例
B.3.7.1配光镜有纹理且功能间有间隔物o
示例:
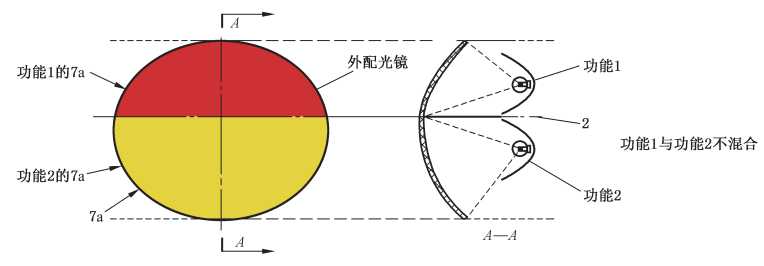
配光镜有纹理。
B.3.7.2
示例:
B.3.7.3
示例:
不考虑无纹理的配光镜。
B.3.7.4
示例:
考虑外配光镜(无论是否有纹理)。

B.3.7.5
示例:
不考虑无纹理的外配光镜,按3.10的定义,“7b”为视表面,功能2的光无法穿透功能IO
B.3.7.6
示例:
任何情况下,即使外配光镜无纹理O
附录C
(规范性附录)
前视红光不可见度和后视白光不可见度
前视红光不可见度和后视白光不可见度见图C.1。
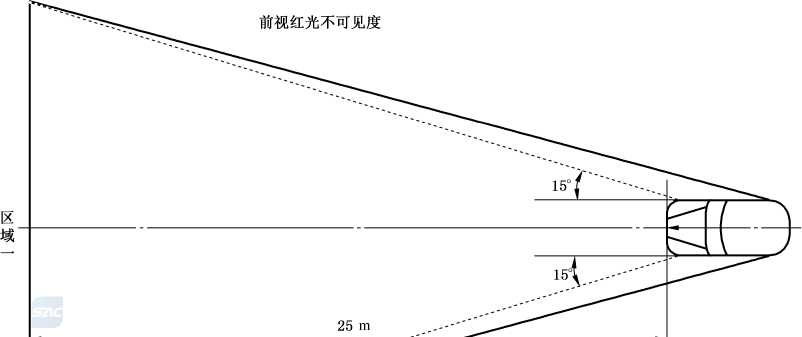
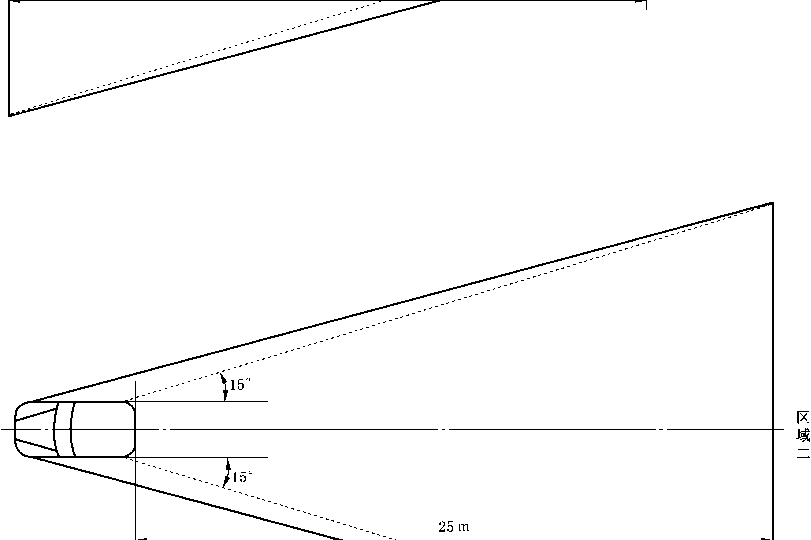
图C.1前视红光不可见度和后视白光不可见度范围
附录D
(规范性附录)
近光光束倾斜度随装载变化的测量
D.1范围
本附录规定了车辆近光光束倾斜度(相对于初始倾斜度)随装载变化的测量方法。
D.2定义
D.2.1初始倾斜度
D.2.1.1标出的初始倾斜度
由车辆制造商规定的近光光束初始倾斜度值,作为计算允许变化的基准值。
D.2.1.2测量的初始倾斜度
近光光束或车辆倾斜度的测量平均值,测量时各类车辆处于附录A第1种状况下:即一个驾驶员 (Ml类);一个驾驶员的空载车(其他类),该平均值作为光束倾斜度随装载变化评定的基准值。
D.2.2近光光束倾斜度
以毫弧度(mrad)表示的角度,该角度由射向前照灯配光明暗截止线水平部分上一个特性点的光束 方向和水平面所构成;或者,是以百分数倾斜度表示的上述角度的正切。由于角度小,所以,1%等 于 10 mrad O
若倾斜度以百分数表示,则可用式(D.1)计算:
倾斜度=Wi) × 100 ..............................( D.1 )
式中:
犺1——是在垂直屏幕上测量的上述特性点的离地高度,单位为毫米(mm),该垂直屏幕与车辆纵向 对称平面垂直,且位于车前L距离处。
犺一—一是基准中心的离地高度,单位为毫米(mm),该基准中心是犺1特性点的标称原点。
L —-一是屏幕到基准中心间的距离,单位为毫米(mm)。
如图D. 1所示,负值表示向下的倾斜度,正值表示向上的倾斜度。
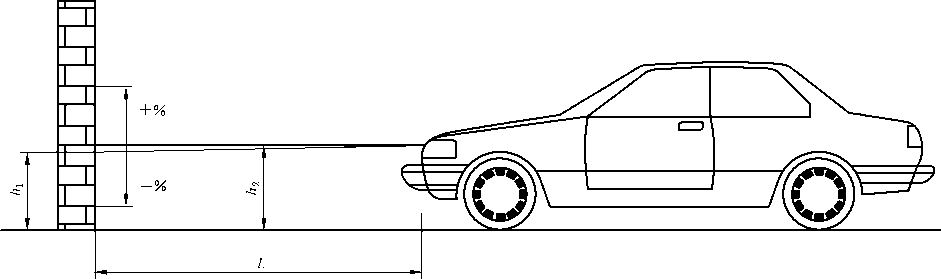
注1:图中给出的是MI类车辆,但其原理同样适用于其他类车辆。
注2:当车辆未配置前照灯调光系统时,则近光光束倾斜度的变化与车辆本身倾斜度的变化一致O
图D.1 Mi类车辆,近光光束向下的倾斜度
D.3测量条件
D.3.1若用目视或光度方法检验近光光束在屏幕上的配光性能,则测量应在暗环境(如暗室)中进行, 该暗室应足够大,可以允许车辆驶入,并放置上图所示的屏幕,前照灯基准中心与屏幕至少相距1。m。
D.3.2测量用地面尽可能水平和平整,以确保近光光束倾斜度测量复现性的准确度为士0.5 mrad(士0.05% 倾斜度)。
D.3.3若使用屏幕,则其相对于地面和车辆纵向对称平面的位置、取向和标记,应保证近光光束倾斜度 测量的再现性准确度为士0.5 mrad(士0.05%倾斜度)。
D.3.4测量期间,环境温度应介于10 °C〜30 °C之间。
D.4 车辆准备
D.4.1应对已经行驶1 000 km~10 000 km的车辆进行测量,最好是已行驶5 000 km的车辆。
D.4.2轮胎按车辆制造商规定的满承载压力充气。车辆补足燃油、水、润滑油,并按制造商规定备齐所 有的附件和工具。补足燃油是指油箱所注燃油不少于其容积的90%。
D.4.3车辆驻车制动器已松开,齿轮变速箱处于空挡位置。
D.4.4车辆在D.3.4规定的环境温度下,停放的时间不少于8 h。
D.4.5若使用光度或目视检测方法,为T便于测量,试验车辆应最好安装近光明暗截止线清晰的前照 灯。也可以使用读数更精确的其他方法(如卸去前照灯的配光镜)。
D.5试验方法
D.5.1总则
近光光束或车辆倾斜的变化与所选择的测量方法有关,并应对车辆两侧分别进行测量。在按附录 A规定的所有装载状况下,测得的左、右前;?灯的结果应位于D.5.5规定的限值范围内。为了使车辆不 遭受过大的冲击,应逐渐施加载荷。
D.5.2测量的初始倾斜度的确定
车辆应按D.4规定准备,并按附录A规定加载(对应于各类车辆的第一种装载状况)。在每次测量 前,车辆应按D.5.4规定晃动。测量应进行三次。
若每次测量结果与算术平均值之间的偏差不大于2 mrad(0.2%倾斜度),则该平均值即为最终 结果。
若任何一次测量结果与算术平均值之间的偏差大于2 mrad(0.2%倾斜度),则再应继续进行测试, 共完成10次测量,该测量系列的算术平均值即为最终结果。
D.5.3测量方法
只要读数准确到士0.2 mrad( + 0.02%倾斜度)的任何方法,均可用来测量倾斜度的变化。
D.5.4在每种装载状况下车辆的处理方法
影响近光光束倾斜度的悬挂或任何其他部件,应按下述方法驱动:
注:然而,技术管理部门和制造商可以联合推荐其他方法(或是试验方法,或是计算方法),特别是当试验遇到特殊 问题时,只要这类计算方法明显有效。
a) 安装常规悬挂系统的Mi类车辆
车辆停放在测量场地,如需要车轮停在活动平台上(当无活动平台会限制可能影响测量结果的 悬挂机构的移动时,应使用),车辆至少连续晃动三次,每次分别先向下推压车辆的后端部,之 后是前端部,晃动结束,在测量之前,车辆应处于自然静止状态,替代活动平台,车辆先向后行 驶至少一个车轮圆周距离,然后向前行驶同样距离,可以取得同样的效果。
b) 安装常规悬挂系统的M2、M3和N类车辆
1) 若不能使用上述D.5.4 a) Mi类车辆的处理方法,则可以使用以下D.5.4 b)2)或D.5.4 b) 3)中的方法。
2) 车辆停放在测量场地上,车轮位于地面,通过改变装载晃动车辆。
3) 车辆停放在测量场地上,车轮位于地面,利用一种振动装置驱动可能影响近光光束倾斜度 的车辆悬挂系统和所有其他部件。这种振动装置可以是振动平台,此时车轮位于该平 台上。
C)非常规悬挂系统的车辆,应启动发动机,待车辆达到稳定状态后开始进行测量。
D.5.5测量
对于不同装载状况下的每种装载状况,应评定近光光束倾斜度相对于测量的初始倾斜度的变化,后 者按D.5.2规定确定。若车辆配备前照灯手动调光系统,则应按制造商规定,调节到相应装载状况的位 置上。按下述方法:
a) 开始时,对应每种装载状况,进行一次测量。若对于所有的装载状况,倾斜度的变化位于一种 安全界限为4 mrad(0.4%倾斜度)的计算限值内(如,位于标岀的初始倾斜度与型式检验规定 上、下限之间的偏差内),则就满足要求。
b) 若任一测量结果不在D.5.5 a)的安全界限内,或超过限值,则应在相应的装载状况下进行三次 测量,其结果应符合D.5.5 C)规定。
C)测量结果的确定:
1) 若三次测量结果与其算术平均值的偏差均不大于2 mrad(0.2%倾斜度),则以算术平均值 作为最终结果。
2) 若任何一次测量结果与其算术平均值的偏差大于2 mrad(0.2%倾斜度),则再应继续进行 测试,共完成10次测量,并以该测量系列的算术平均值作为最终结果。
3) 所有的测量应按D.5.5 c)1)和D.5.5 c)2)规定进行O
d) 若在所有装载状况下,按D.5.2确定的测量的初始倾斜度,与在每一种装载状况下测量的倾斜 度之间的变化,小于D.5.5 a)中的计算值(如果无安全界限)则就满足要求。
e) 若只是超岀计算的变化上限或下限(两者之一),则应允许制造商在型式检验规定的限值内,为 标岀的初始倾斜度选择一个不同的数值。
附录E
(规范性附录) 路试
E.1对于自动控制的远光灯进行路试
E.1.1路试应在干净的大气状况,并配有清洁的前照灯情况下进行。 E.1.2试验项目按表E.1中描述的各交通情况和各类型路段的速度。
表E. 1
|
试验编号 |
试验项目 |
路况 | ||
|
城区 |
中间有隔离带的道路, 例如:高速公路 |
乡村道路 | ||
|
速度 | ||||
|
(50 + 10) km/h |
(100 + 20) km/h |
(80 + 20) km/h | ||
|
对于全路段试验所占的百分比 | ||||
|
10% |
20% |
70% | ||
|
Λ |
一辆来车或一辆前车按一定 频率出现,远光光束应能自动 打开和关闭 |
√ |
√ | |
|
B |
多辆来车和多辆前车按一定 频率出现,远光光束应能自动 打开和关闭 |
√ |
√ | |
|
C |
主动和被动的超车按一定频 率出现,远光光束应能自动打 开和关闭 |
√ |
√ | |
|
D |
多辆来车和多辆前车按一定 频率出现__________ |
√ | ||
E.1.3城区道路应包括有照明和无照明的情况。
E.1.4乡村公路应包含2车道路段、4车道或更多车道路段,且应包括交叉道路、丘陵和/或斜坡、下坡 和弯曲道路。
E.1.5多车道道路(例如高速公路)和乡村公路应包含具备长度超过60Om的平直路段。此外,还应包 含向左和向右弯道的路段。
E.1.6应考虑到交通繁忙的情况。
E.2对自适应远光灯进行路试
E.2.1路试应在干净的大气状况,并配有清洁的前照灯情况下进行。
E.2.2试验项目按表E.2中描述的各交通情况和各类型路段的速度。
E.2.3城区道路应包括有照明和无照明的情况。
E.2.4乡村公路应包含2车道路段、4车道或更多车道路段,且应包括交叉道路、丘陵和/或斜坡、下坡 和弯曲道路。
E.2.5多车道道路(例如高速公路)和乡村公路应包含具备长度超过60Om的平直路段。此外,还应包 含向左和向右弯道的路段。
E.2.6应考虑到交通繁忙的情况。
E.2.7对于表E.2中的项目A和项目B,试验人员应从会车和前方车辆内对自适应效果进行评估和记 录,这意味着在试验车辆,会车车辆和前方行驶车辆中,均应配备试验人员。
表E.2
|
试验编号 |
试验项目 |
路况 | ||
|
城区 |
中间有隔离带的道路, 例如:高速公路 |
乡村道路 | ||
|
速度 | ||||
|
(50 + 10) km/h |
(100 + 20) km/h |
(80 + 20) km/h | ||
|
对于全路段试验所占的百分比 | ||||
|
10% |
20% |
70% | ||
|
A |
一辆来车或一辆前车按一定 频率出现,自适应远光灯应能 自动运行 |
√ |
√ | |
|
B |
多辆来车和多辆前车按一定 频率出现,自适应远光灯应能 自动运行 |
√ |
√ | |
|
C |
主动和被动的超车按一定频 率出现,自适应远光灯应能自 动运行 |
√ |
√ | |
|
D |
多辆来车和多辆前车按一定 频率出现__________ |
√ | ||
附录F
(规范性附录)
前照灯近光和前雾灯明暗截止线垂直向下倾斜度调整指示
5.2.6.1.1中前照灯近光和5.3.6.1.2中前雾灯明暗截止线垂直向下倾斜度调整指示。
示例1:前照灯近光的标准符号
说明:符号和字符的尺寸由制造商确定,并标出初始调整值。
示例2:前雾灯的标准符号
说明:符号和字符的尺寸由制造商确定,并标出初始调整值。
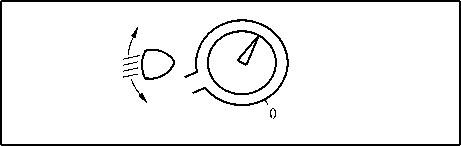
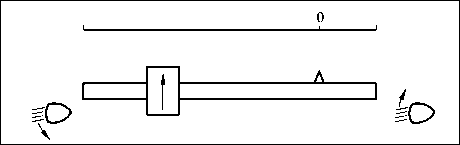
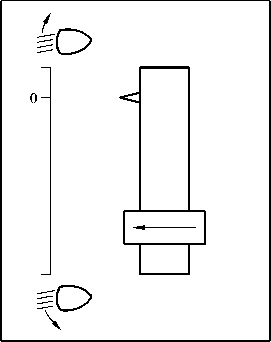
附录G
(规范性附录) 前照灯调光装置控制器
G.1在所有情况下应通过下面三种方法中一种来使近光向下倾斜:
a) 向下或向左移动控制器;
b) 逆时针旋转控制器;
C)按下一个按钮。
如果是用多个按钮调节,那么下降量最大的按钮应放于其他按钮最下方或最左边。
对于安装后或者只是边缘可见的旋转类控制器,应按照a)或b)类的操作原则。
控制器上应具有明确表明近光向上和是向下的倾斜符合。
G2 “0”位表示5.2.6.1.1中的初始倾斜位置。
G.3对于5.2.6.2.2中所提的手动调节装置,其要求的“停止位”就标为“0”位,并且不需要一定是极限 位置。
G.4说明书上应有控制器上标志的含义。
G.5应使用图G.1的符号或图G.2和图G.3中的符号组合来识别控制器,符号中的四条线也可以用五 条线来代替(见示例)。
图G.1
图G.2
图G.3
示例1:
示例2:
示例3:
附录H
(规范性附录) 自动切换前照灯近光
自动切换前照灯近光条件见表H.l0
表H.1
|
自动切换前照灯近光的条件 | ||
|
外界环境光 |
近光灯 |
响应时间 |
|
小于l OOO Ix |
开启 |
不大于2 S |
|
l OOO IX〜7 OOO IX |
由制造商确定 |
由制造商确定 |
|
大于7 OOO IX |
关闭 |
大于5 s,不大于3OO S |
|
注:使用经过余弦修正的照度计与车辆传感器安装位置等高的水平面上进行测量。 | ||
附录犐
(规范性附录) 慢行灯的视表面观察区域
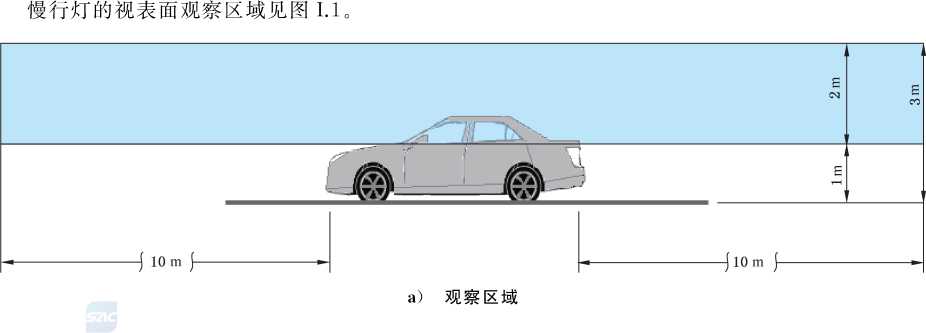
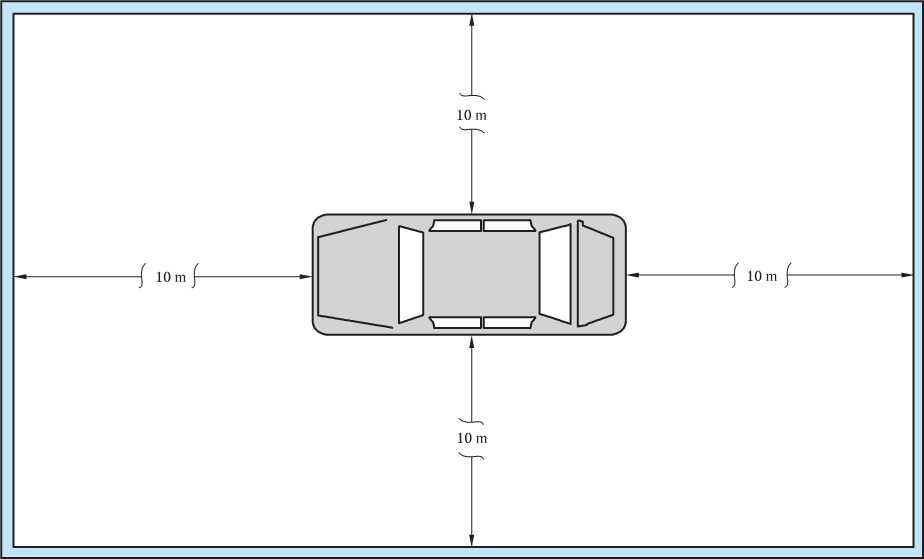
b)区域边界
图1.1慢行灯的视表面观察区域
[1] ECE R99 Uniform ProVi S i OnS ConCerni ng the approval Of gas-di SCharge Iight SoUrCeS for
USe in approved gaS-dScharge lamp UnitS of POWer-driven VehCIeS
[2] ECE R128 UnifOrm PrOViSiOnS COnCernmg the approval of light emitting diode (LED) light SOUrCeS for USe in approved lamp UnitS on POWer-driven VehCIeS and their trailerS