
ICS 47.020.70
R 34
备案衫:
JT∕ Γ 680. 1—2016
代替 ∕T∕Γ 680.1—2007
TCChniCal requirements for Ihe installation, operation, maintenance and repair Of marine navigation equipment—
Part 1: General and guidance
2016-10-21 发布
2017-01-01 实施
JT/T 680(船用通信导航设备的安装、使用、维护、修理技术要求》分为15个部分:
—第1部分:总则;
--第2部分:导航雷达;
—第3部分:回声测深仪;
—第4部分:陀螺罗经;
—第5部分:电磁计程仪;
—第6部分:自动操舵仪;
—第7部分:多普勒计程仪;
—第8部分:声相关计程仪;
—第9部分:磁罗经;
—第10部分:甚高频(VHF)无线电装置;
—第11部分:蓄电池和充电设备;
—第12部分:船舶电台天线和接地;
——第13部分:406MHZ卫星应急无线电示位标;
—第14部分:9 GHZ搜救雷达应答器;
—第15部分:救生艇(筏)双向甚高频便携式无线电话。
本部分是JT/T 680的第1部分。
本部分按照GB/T 1.1 —2009给出的规则起草。
本部分代替JT/T 680.1 -2007(船用通信导航设备的安装、使用、维护、修理技术要求 第1部分: 总则》。与JT/T 680.1 —2007相比,主要技术变化如下:
—增加了术语和定义,见第3章;
—增加了缩略语,见第4章;
—增加了船载雷达设备安装指南,见6.9和附录B;
—增加了船载自动识别系统(AlS)安装指南,见6.10和附录Co
本部分由交通运输信息通信及导航标准化技术委员会提出并归口。
本部分起草单位:中海电信有限公司。
本部分主要起草人:江帆、支家茂、徐小骅。
本部分所代替标准的历次版本发布情况为:JT 4530. 1—1985,JT∕T 8100. 1—1992,JT∕T 680. 1— 2007。
学兔兔 www.bzfxw.com
1范围
JT/T 680的本部分规定了船用通信导航设备的一般要求及安装、使用、维护和修理的通用技术要求。 本部分适用于海洋各航区及内河船舶和海上设施上的通信导航设备。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
|
GB/T 11412.1 —2009 GB/T 16162 JT/T 704 IEC 61162-2 |
海船安全开航技术要求 第1部分:一般要求 全球海上遇险和安全系统(GMDSS)术语 水上通信、导航和信息词汇 海上导航和无线电通信设备及系统 数字接口 第2部分:单送话端和多 收话端,髙速传输(Maritime navigation and radiocommunication equipment and SyStemS—DigitaI interfaces—Part 2 : Single talker and multiple IiStenerS, high - SPeed transmission) |
|
IMO A.1053(27) |
2011年协调检验和发证系统(HSSC)的检验指南[SUrVey guidelines Under the harmonized SyStem Of SUrVey and CertifiCatiOn ( HSSC) ,2011 ] |
|
IMO MSC.982 SOLAS |
船桥设备及设计的人体工程学标准指南 国际海上人命安全公约 |
3术语和定义
GB/T 16162和JT/T 704界定的以及下列术语和定义适用于本文件。
3.1
内置综合测试 built-in integrity test
设备内部用于自动监测设备故障,并用显示和接口方式输出故障信息的自检功能。
3.2
统一公共基准点 COnSiStent COmmOn reference POint
用于测量目标距离、方位、相对航迹向、相对速度、最近会遇点、最近会遇点时间的统一公共基准参 照位置。
3.3
电子定位装置 electronic PoSitionfiXing device
用电子技术进行定位的装置。
3.4
个人引水装置 PerSOnal PilOt Unit
船舶引水员使用的便携式导航设备
3.5
船舶静态数据ShiP StatiC data
船载自动识别系统中的船名、呼号、全球定位系统天线位置(A、B、C、D数据)、终端标识等不随船 舶移动而改变的信息。
3.6
航行静态数据 VOyage StatiC data
在船舶运输的一个航次中,船载自动识别系统中的船舶类型、装载货物种类、当前最大静态吃水、在 船人员、目的地、预计到达日期时间、航行状态等在船舶航行中相对不变的信息。
4缩略语
下列缩略语适用于本文件。
AIS----自动识别系统(AUtOmatiC IdentifiCatiOn SyStemS)
BIlT----内置综合测试(BUiIt-in Integrity TeSt)
CCRP---统一公共基准点(COnSiStent COmmOn ReferenCe POint)
COG---对地航向(COUrSe OVer GrOUnd )
DTM——基准(DatUm)
EPFD----电子定位装置(EleCtrOniC POSitiOn FiXing DeViCe)
EPlRB---应急无线电示位标(EmergenCy POSitiOn IndiCatOr RadiO BeaCOn )
GNSS---全球导航卫星系统(GIObaI NaVigatiOn SatelIite SyStem)
GPS---全球定位系统(GIObaI POSitiOning SyStem)
IEC----国际电工委员会(IntematiOnaI EleCtrOteChniCaI COmmiSSiOn)
IMO----国际海事组织(IntematiOnaI Maritime OrganiZatiOn )
INMARSAT---国际海事卫星通信系统(IntematiOnaI Maritime SatelIite OrganiZatiOn )
ITU---国际电信联盟(IntematiOnaI TeIeCOmmUniCatiOn UniOn)
MKD---最小键盘和显示器(MinimUm KeybOard and DiSPlay )
MMSl---水上移动业务识别代码(Maritime MObiIe SerViCe Identity )
MSC----海安会(Maritime Safety COmmittee)
Pl----表示接口( PreSentatiOn InterfaCe )
PPU---个人引水装置(PerSOnaI PiIOt Unit)
ROT---转向率(Rate Of TUrn )
SART---搜救雷达应答器(SearCh and ReSCUe Radar TranSPOnderS)
SOG---对地航速(SPeed OVer GrOUnd )
SOLAS---国际海上人命安全公约(IntematiOnaI COnVentiOn for the Safety Of Life at Sea)
SSD---船舶静态数据(ShiP StatiC Data)
UPS---不间断电源(Uninterrupted POWer SUPPIy )
UTC---世界协调时(UniVerSaI Time COOrdinatiOn)
VHF---甚髙频(Very High FreqUenCy)
VSD---航次静态数据(VOyage StatiC Data)
5 —般要求
5.1设备的安装、使用、维护、修理的技术要求应满足GB/T 11412.1-2009的有关规定。
5.2各种设备的安装、使用、维护、修理应达到各相应的产品标准技术要求。
5. 3设备的安装、使用、维护、修理人员应经过专业培训合格,并经有关部门认可或具备相应的证书。
5.4设备的安装、使用、维护、修理人员应遵守相关的安全操作规程。
5.5设备的安装、使用、维护、修理所用的检测仪器,应经过有关部门计量认证合格,并在有效期内。
5.6设备自安装开始应建立设备档案。档案内容应包括设备安装验收记录、使用、维护记录和修理记 录,其中:
a) 设备安装验收记录表格式参见附录A的A. 1,主要包括:
1) 设备名称、设备型号、出厂编号、本单位设备编号;
2) 附件和备件清单;
3) 设备安装位置图、布线图、安装日期。
b) 使用、维护记录建议的记录表格式参见附录A的A.2、A.3和A.4 ,主要包括:
1) 易耗损备件的使用和更新记录;
2) 设备按维护周期进行的维护记录;
3) 法定检验设备及部件有效期记录。
C)设备修理记录表格式参见附录A的A.5,主要包括:设备名称、发现故障日期、故障现象简述、 维修结果、维修服务商。
5.7从事设备的安装、调试和维修的单位应符合主管部门的资质要求。
5.8在设备安装、调试、修理和船舶实施演练的过程中,不得影响正常的安全通信,应按测试要求规定 的程序进行测试,防止产生误报警。
5.9随船舶航行进行的设备安装、修理和调试,应不影响航行安全;安装、修理和调试过程应满足相关 的安全操作规定,否则,不应安排船舶开航期间的设备安装、修理和调试。
5.10有特殊安全要求的船舶,在实施设备的安装、调试、修理和使用液化汽烙铁前,应得到船上主管 人员认可后方能实施和使用。
6安装
6.1设备开箱后,应按装箱清单检查设备是否完好,备品、附件、技术资料是否齐全并做好清点记录, 建立设备档案。
6.2安装前应明确安装技术要求和人员分工职责,并制定安全操作措施。
6.3按设备安装说明书及安置部位,确定安装布局和计划。
6.4应对所用电缆的绝缘性能进行验证,其绝缘电阻大于10M。。
6.5设备安装之后,按设备说明书及本标准规定的要求检查各部位的安装质量。
6.6安装后按设备使用说明书通电测试,检查设备性能。
6.7测试通过后,在设备档案中附上设备安装位置图、布线图等有关资料。
6.8新增设备的安装应满足船级社的相关规定。
6.9船载雷达设备安装指南见附录BO
6.10船载AlS安装指南见附录Co
7使用与维护
7.1使用人员应按设备使用说明书及安全操作规程使用设备,并填写专用记录本,记录内容应包括日 期、设备正常运转时间、性能完好情况及使用人员姓名等。
7.2应按说明书要求进行日常保养和定期维护工作。
8修理
8.1修理之前,了解故障现象,确定修理部位,有高压电容的设备应将电容放电后再修理故障部位。
8.2更换元器件前,应切断电源。更换时按原安装结构放到原位,安装牢靠焊接良好。使用的电烙铁 应接地和绝缘良好。
8.3修理后应检测设备性能,并经管理和使用人员验收。
8.4在设备档案中填写故障现象、处理办法、性能恢复情况、修理人员姓名、验收人员姓名及修理日 期等。
附录A
(资料性附录) 设备管理和记录表格式
A.1设备登记表
设备登记表见表A.1。
表A.1设备登记表
|
设备名称 | |
|
设备型号 | |
|
出厂编号 | |
|
本单位设备编号 | |
|
安装日期 | |
|
主要性能参数, | |
|
附件与备件 |
1 2 3 保管人: 4 5 6 存放位置: |
|
完工图纸 (设备安装位置图、布线图) |
有口无口 保管人: 存放位置: |
|
新增日期 |
新增设备日期: 年 月 日 在何地: 工程实施单位: |
|
更新日期 |
更新设备日期: 年 月 日 在何地: 工程实施单位: 更新设备日期: 年 月 日 在何地: 工程实施单位: |
|
证书编号 |
有口无口 保管人: 存放位置: |
|
a由船舶管理部门确定是否测试和测试的项目。________________________________ | |
A.2易耗损备件使用和更新记录表
易耗损备件使用和更新记录表见表A.2O
表A.2易耗损备件使用和更新记录表
|
日期 |
设 备" |
签名 | |||||||||
|
雷达磁控管 |
陀螺球 | ||||||||||
|
雷达一 |
雷达二 |
雷达三 |
陀螺罗经一 |
陀螺罗经二 | |||||||
|
年 |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) | |
|
1月 | |||||||||||
|
2月 | |||||||||||
|
3月 | |||||||||||
表A.2(续)
|
日期 |
设 备a |
签名 | |||||||||
|
雷达磁控管 |
陀螺球 | ||||||||||
|
雷达一 |
雷达二 |
雷达三 |
陀螺罗经一 |
陀螺罗经二 | |||||||
|
年 |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) |
累计工作 时间(h) |
更新日期 (月 日) | |
|
4月 | |||||||||||
|
5月 | |||||||||||
|
6月 | |||||||||||
|
7月 | |||||||||||
|
8月 | |||||||||||
|
9月 | |||||||||||
|
10月 | |||||||||||
|
11月 | |||||||||||
|
12月 | |||||||||||
根据实际管理要求,船舶管理部门可参照本表格在“设备”栏目中增加设备和部件的名称。
A.3设备维护记录表
设备维护记录表见表A. 3
表A.3设备维护记录表
|
设备名称 |
维护周期 (月) |
维护实施日期 (年 月 日) |
维护内容 |
实施人签名 |
A.4法定检验设备及部件有效期记录表
法定检验设备及部件有效期记录表见表A.4o
表A. 4法定检验设备及部件有效期记录表
|
无线电设备年度检验 |
本次检验或更换日期 (年 月曰) |
下次检验或更换预计日期 (年 月曰) |
验收人名 |
|
EPIPB年度检验 | |||
|
EPIRB五年度岸基维护 | |||
|
EPlRB电池有效期 | |||
|
EPlRB释放器有效期 | |||
|
SART-I电池有效期 | |||
|
SART-2电池有效期 | |||
|
双向手机1电池有效期 | |||
|
双向手机2电池有效期 | |||
|
双向手机3电池有效期 | |||
|
双向手机4电池有效期 | |||
A. 5设备修理记录表
设备修理记录表见表A.5 O
表A.5设备修理记录表
|
设备名称 |
发现故障日期 (年月 日) |
故障现象简述 |
修理结果 |
维修服务商 |
|
修复□ 未修复口 备注: 验收人签名: | ||||
|
修复□ 未修复口 备注: 验收人签名: | ||||
|
修复□ 未修复口 备注: 验收人签名: | ||||
|
修复□ 未修复口 备注: 验收人签名: |
附录B
(规范性附录) 船载雷达设备安装指南
B.1总则
雷达正确安装是确保雷达使用性能的前提。本附录内容可以作为安装、维护服务及船舶检验的指 南,但不应替代产品制造厂商所提供的文件及资料。
B.2适用
本附录适用于1974年SOLAS公约及其修正案强制要求的船载雷达设备的安装。本附录也兼顾 MSC. 192(79)决议有关雷达设备性能标准修订内容。
B.3检验
公约船检验应按照IMO A. 1053(27)决议及其附录1的规定执行。
B.4文件
雷达安装前,船厂、船东、生产厂商应向安装人员提供下列有效文件:
a) 雷达安装比例图,包含船舶前后左右及上视图。图上注明雷达和其他装置的天线安装位置, 注明船舶结构体或货物对雷达性能造成的潜在影响及转臂起重机的转动范围。
b) 雷达天线的安装比例图,图上标明雷达天线的旋转直径。
C)驾驶室安装图,图上标明雷达显示单元和雷达主机单元的安装位置。
d)雷达天线安装图和接线图,确认设备的型号、工作频率、天线尺寸、型式认可证书、外接设备列 表。外接设备列表包含生产厂商、类型、方框图(接线框图)及型式认可证书。
B.5雷达天线安装
B.5.1防干扰安装要求
雷达天线安装应防止相对于其他天线的位置可能对设备造成干扰,满足下列要求:
a) 雷达天线安装位置应远离大功率干扰源以及其他无线电发射和接收天线;
b) 雷达天线下缘应高于安装平台护栏0. 5m以上;
C)相邻雷达的安装,应尽可能保持最小20。的垂直扇形分离角度以及最小Im的垂直分隔距离。
B.5.2相对于大桅、烟囱和其他结构的安装
雷达天线相对于桅杆、烟囱和其他结构的位置,安装要求如下:
a) 雷达天线安装通常应避开任何可能引起信号反射的物体;
b) 确保任何支撑物或其他障碍物不应妨碍天线的转动;
C)天线和旋转装置应与磁罗经保持安全距离。
B.5.3盲区范围
应尽可能使雷达天线在水平和垂直方向上盲区最小;尽可能在水平方向上对目标具有360。自由观 测范围。考虑盲区范围,雷达天线的安装要求如下:
8
a) 满载平衡条件下,从雷达天线到船头前方海面上的视线应不超过500m或两倍的船舶长度,取 其最小者;
b) 应位于较高位置,以获得最大的目标探测区域;
C)盲区应保持在最低限度,不应出现在船舶正前方到正横后两侧22.5。的水平弧度范围内,如图
B.1所示;
d) 若单个盲区大于5。,或总盲区的弧度大于20。,则除列项C)之外,盲区不应出现在剩余的弧度 范围内;
e) 安装两个雷达系统,可能的情况下,天线的安装也应按照上述规定,以尽量减少盲区。
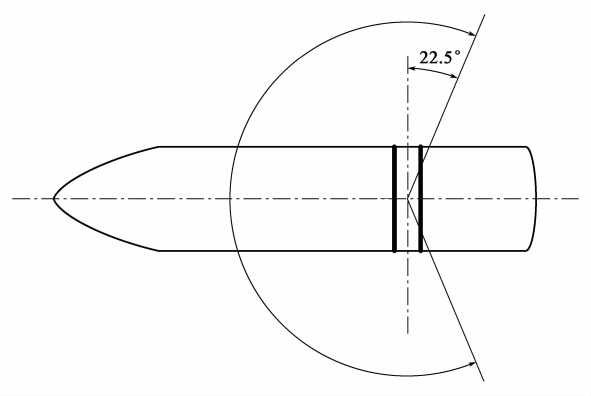
图B.1雷达盲区示意图
B.5.4雷达的吊装设备
安装雷达系统时需要利用起重机、三脚架和提升机等特种设备。雷达设备应按照生产厂商提供的 资料进行吊装。
B.6 一般要求
B.6.1雷达安装与维护服务平台
应提供雷达安装与维护服务平台,其面积应不小于Im2 ,高度应适合天线的维护作业,且周围应安 装合适高度的防护栏。雷达相对于磁罗经应有安全距离,具体要求应按照设备生产厂商的规定。服务 平台及天线底座应具有足够的强度,能经受住船舶震动。
B.6.2雷达天线安装位置要求
天线的安装位置应足够高,以降低海杂波和多径效应的影响。
B.6.3电缆和接地
电缆和接地要求如下:
a) 电缆屏蔽,特别是同轴电缆屏蔽应按照生产厂商的文件要求安装;
b) 电缆应尽可能短,以减少信号的衰减;
C)天线和雷达系统单元之间的所有电缆应尽可能采用直线布设,以减少电磁干扰的影响;
d) 电缆不应靠近大功率线路附近;
e) 电缆交叉应采用90。十字交叉布设;
f) 所有室外安装的连接头应为防水设计;
g) 电缆和微波传输线不应靠近尖锐弯角处;
h) 电缆和微波传输线布设应按照生产厂商的文件规定,具有足够的物理分隔距离;
1)设备单元的接地应按照生产厂商的文件规定执行。
B.6.4供电
雷达应连接船舶应急电源,并满足SOLAS第2章第1节的规定。
B.6.5 雷达控制和显示
B.6.5.1若控制面板为独立装置,则在所有提供雷达显示的工作站,应向驾驶人员提供雷达控制 功能。
B.6.5.2显示器安装位置应确保驾驶人员观察时面向船头。按照MSC∕Circ.982的规定,瞭望视线不 应被遮挡,而且环境光对显示屏显示弱化影响应最小。
B.6.6雷达初始安装要求
B.6.6.1雷达系统要求正确的系统设置。
B.6.6.2船舶应保存下列文件:
a) 安装公司签署的安装报告:报告内容包括安装说明以及按生产厂商手册规定所执行的设 置等;
b) 可能的性能限制信息:包含盲区,注明对船员至关重要的雷达系统安装信息;
C)接口和系统参数(包括CCRP位置偏移值)设置:按照生产厂商的文件规定,并作为列项a)安 装报告中的附件。
附录C (规范性附录) 船载自动识别系统(AlS)安装指南
C.1总则
C.1.1船载AlS是经ITU和IEC标准化定义和型式认可的。AlS提供的信息可用于船舶导航且应准 确可靠。
C.1.2为了满足信息交换可靠性要求,应确保AlS安装正确无误。
C.1.3本附录作为安装和检验的指南,不应替代生产厂商提供的文件资料。
C.2文件
AlS安装应提供天线布置图、AIS布置图及接线框图。若初始安装,则在安装作业完工时应给出初 始安装配置报告,并留船存档。
C.3 AlS安装
C.3.1 AlS室外单元安装
AlS天线安装应与VHF天线保持适当距离,避免AlS与VHF无线电话相互干扰。
C.3.2 VHF天线安装
C.3.2.1安装位置
VHF天线安装位置满足如下要求:
a) AlS VHF天线应支持全向垂直极化。
b) AlS VHF天线应安装在较高处,尽可能保持水平方向2m以内无导体结构物体。AlS VHF天 线安装不应靠近大型垂直障碍物。
C) AlS VHF天线安装应远离大功率发射源(如雷达)及其他无线电发射天线,距离发射波束不少 于3m。
d)在同一水平面上不宜安装多幅天线。AlS VHF天线应安装在船舶主用VHF无线电话天线的 垂直上方或下方并保持垂直距离不少于2m。若在同一水平面上安装,相互之间距离应保持 不少于IOmO
C.3.2.2 布线
C.3.2.2.1电缆应尽可能短。推荐选用双屏蔽同轴电缆或更优。
C.3.2.2.2室外安装的同轴电缆连接头应为防水设计,以阻止水对天线电缆的渗透。
C.3.2.2.3同轴电缆应布设在独立的信号电缆通道内,与供电电缆保持至少Ioomm的距离。电缆交 叉时应采用90°十字交叉。同轴电缆不应锐角弯曲,最小弯曲半径应为电缆外径的5倍。
C.3.2.3 接地
同轴电缆的屏蔽层应单端接地。
C.3.3 GNSS/GPS 天线安装
C.3.3.1安装位置
C.3.3.1.1 A类AlS连接有GNSS天线。GNSS天线安装应有空旷的视野,在水平方向上对目标具有 360°自由观测范围,同时在垂直方向上具有5°~90。自由观测范围。桅杆等小直径障碍物在方位上的遮
11
挡最大不应超过5°。
C.3.3.1.2天线的位置至少应远离大功率发射装置(S波段雷达、INMARSAT船站天线)的发射波束 3m以上,包括船舶自身的AlS VHF天线。
C.3.3.2 布线
C.3.3.2.1天线前置放大器的增益应与电缆衰减匹配,由此安装后的增益(前置放大器增益-电缆衰 减)应在。〜IodB以内。
C.3.3.2.2天线与船载AlS各单元之间的同轴电缆应直连布设。电缆布设不应靠近雷达、无线电发 射机或AlS VHF天线电缆等大功率馈线,宜保持Im或以上的电缆间隔。天线电缆交叉应采用9。°十字 交叉。
C.3.3.2.3室外安装的同轴电缆连接头应为防水设计。
C.3.4供电
雷达应连接船舶应急电源,并符合SOLAS第2章第1节的规定。宜配置UPS,UPS应连接船舶主 电源。
C.3.5 同步
安装完毕,AIS应与UTC准确同步,且位置信息(若提供)应正确有效。
C.4驾驶室内主机安装
C.4.1最小键盘和显示器
MKD安装位置应方便船员操作。AlS内置的MKD应与单独的显示系统具有相同的功能。
C.4.2引水员插座
C.4.2.1连接引水员输入/输出接口的插座应安装在靠近引水员操作位置的驾驶室墙壁上,以便连 接 PPUO
C.4.2.2引水员插座针脚分布如图C.1所示,其连接应满足下列要求:
a) TXA连接到1号脚;
b) TXB连接到4号脚;
C) RXA连接到5号脚;
d) RXB连接到6号脚;
e) 屏蔽层连接到9号脚。
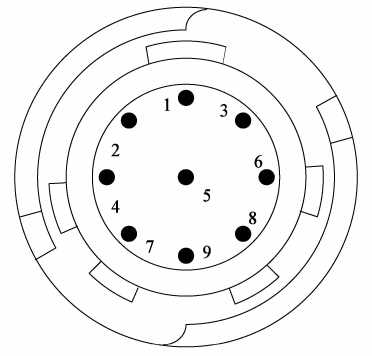
图C.l AIS的引水员插座示意图
C.4.3显示系统
A类AlS可通过AlS的Pl连接导航设备。Pl输入/输出应符合IEC 61162-2要求。
C.4.4内置综合测试功能
C.4.4.1应将AlS报警输出连接到声音报警装置或船舶报警系统。
C.4.4.2 BllT报警系统通过Pl输出报警信息,连接的报警系统应与AlS兼容。
C.5动态数据输入
C.5.1外接传感器
AlS具有位置、航向和RoT传感器接口,连接到AlS的传感器应符合SOLAS第5章的要求。AlS发 送的传感器信息应与船舶导航信息一致。
C.5.2 位置信息、COG和SOG
GNSS传感器位置信息、C0G和SOG输出应直接连接到AIS,其格式要求如下:
a) 传感器发送的位置数据,其地理坐标格式是WGS84,且配置同IEC 61162-2 DTM语句;
b) AlS可选择两个天线位置参考点,一个为外置传感器,一个为内置传感器。若使用一个以上外 置参考点,应向AlS输入适当的信息以调整参考点。
C.5.3赭向
罗经提供的艄向信息应强制接入AlSo若船舶罗经输出的信号不符合IEC 61162-2要求,则应使用 罗经信号转换器将输出信号转换为IEC 61162-2格式,并接入AlSo
C.5.4 转向率(ROT)
C.5.4.1若船舶配备了 ROT指示器,且有符合IEC 61162-2格式的输出接口,则应接入AlSo
C.5.4.2若ROT指示器提供的信息不可用,则应选择从以下设备获得信息:
a) 罗经本身;
b) 外接转换装置;
C) AlS本身。
C.5.5航行状态
应向驾驶人员(操作者)提供简单的方法向AlS输入船舶航行状态(如主机推进、锚泊灯)信息。 AlS可连接船舶状态指示灯。
C.6静态信息
C.6.1 AlS初次安装时的设置
C.6.1.1静态信息、航行相关的信息以及动态信息应能通过MKD手工输入,或通过Pl的IEC 61162-2识别语句SSD和VSD输入到AlS中。
C.6.1.2 AlS初次安装应输入的静态信息包括:
a) MMSI;
b) 船舶IMo代码;
C)船舶无线电台呼号;
d) 船舶名称;
e) 船舶类型;
f) EPFD天线的参考点位置数据(一般是GPS天线的安装位置)。
C.6.1.3要获得设备内部的某些设置参数,如船舶MMSl码、IMO编号以及功率和频道设置等AlS控 制项,需要具备权限,如密码。
C.6.2位置参考点
C.6.2.1 AlS可保存两个位置参考点,分别为外置GNSS天线位置参考点和内置GMSS天线位置参考 点,内置参考点为位置报告的备份。在安装时应设置这些参考点位置,用4、B、C、。来表示,如图C.2 所示,其中:
a) 4为船头到天线的距离(取值范围。〜511m);
b) B为船尾到天线的距离(取值范围。〜511m);
C) C为船左舷到天线的距离(取值范围。〜63m);
d) D为船右舷到天线的距离(取值范围。〜63m)。
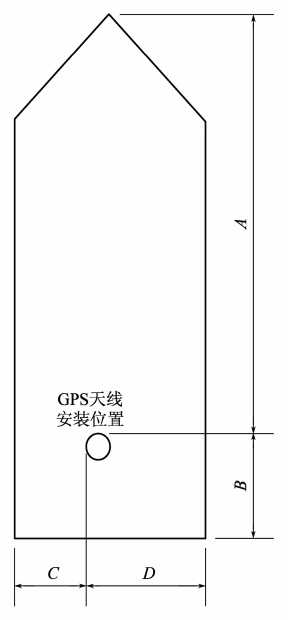
图C.2 GPS位置及在船上的位置数据
C.6.2.2外置参考点也可作为计算用共同基准点。
C.6.2.3经PI传输的SSD语句,其内容应包含经AlS处理的参考点位置数据,且与AlS存储器里的 外置参考点设置数据一致。
C.6.3船舶尺寸
C.6.3.1船舶尺寸应为船舶的总长度和总宽度,用A +BλC +。表示,如图C.2所示。
C-6.3.2在输入内置和外置参考点数据时,船舶尺寸(A + B和C +。)应一致。
C.6.3.3 4应在艙向的方向上。
C.6.3.4当EPFD天线被安装到船头最左舷的角上时,A、B、C、D之一应设置为10
14
参考文献
[1 ] GB/T 20068船载自动识别系统工程(AlS)技术要求
[2] IEC 61993-2海上导航通信设备及系统的自动识别系统(AlS)第2部分:A类船载设备AlS 的操作和性能标准一测试方法及其必要的测试结果
[3 ] ITU-RM.1371在VHF水上移动频带内使用时分多址的自动识别系统的技术特性
[4] IMO MSC.192(79)雷达设备性能标准
[5 ] IMoSN.l∕Circ. 271船载雷达设备安装指南
[6] IMoSN/Circ. 227船载自动识别系统(AlS)安装指南