库七七www.kqqw.com提供下载
ICS 47.020.01
U 04
⅛∙∕ F⅞⅝.. ...V.∙.∙.∙ .T777tJ⅞¾
GB/T 14090—2020
代替 GB/T 14090-2008
TerminOIOgy for OffShOre Oil and gas development engineering
2020-09-29 发布
2021-04-01 实施
本标准按照GB/T 1.1-2009给岀的规则起草。
本标准代替GB/T 14090-2008《海上油气开发工程术语》,与GB/T 14090-2008相比,除编辑性 修改外主要技术变化如下:
——调整了标准的章条框架设置并修改了标题(见第2章〜第5章,2008年版的第2章〜第5 章);
——将术语“桩靴”和“柱靴”合并为“桩靴”(见3.3.11,2008年版的3.2.11和3.2.12);
——增加了部分术语和定义(见 2.2.2,2.2.3、2.2.4、2.2.6、2.2.11、2.2.44、2.3.25、2.3.26、2.5.1、2.5.2、 2.5.4、2.5.5、2.5.6、2.5.8、3.1.4、3.1.5、3.1.6、3.1.19、3.1.20、3.1.21、3.1.22、3.1.36、3.2.6、3.2.7、 3.2.8、3.2.17、3.2.18、3.2.21、3.2.30、3.2.37、3.3.10、3.3.39、4.2.4、4.2.17、4.2.19、4.3.13、4.3.14、 4.3.15、4.3.16、5.2.1、5.2.2、5.3.4、5.4.11);
——修改了部分术语的定义(见 2.2.1、2.3.1、4.2.3〜4.2.5 和 5.1.2,2008 年版的 2.2.1、2.2.47、4.1.2〜 4.1.4 和 5.1.2)。
本标准由全国海洋船标准化技术委员会(SAC/TC 12)提岀并归口。
本标准起草单位:中国船舶工业综合技术经济研究院、大连船舶重工集团有限公司。
本标准主要起草人:程楠、高学峰、王欣、刘煩鸣、袁鑫、葛永强、孙明、李放、石强。
本标准所代替标准的历次版本发布情况为:
——GB/T 14090.1—1993、GB/T 14090.2—1993、GB/T 14090.3—1993、GB/T 14090.4—1993; ——GB/T 14090—2008o
1范围
本标准规定了海上油气开发工程的相关术语及其定义O
本标准适用于海上油气开发工程的教学、科研、设计和生产O
2 综合
2.1油气开发系统
2.1.1
固定式生产系统fixed ProdUCtion SyStem
以固定式结构支承海上油气处理装置的生产系统O
2 . 1 . 2
浮式生产系统 floating PrOdUCtiOn SyStem ; FPS
以浮式平台、生产储油船等支承海上油气处理装置的生产系统O
2.1.3
顺应式生产系统 COmPiiant PrOdUCtiOn SyStem
以顺应式结构支承海上油气处理装置的生产系统O
2 . 1 . 4
水下生产系统 UnderWater PrOdUCtiOn SyStem ; SUbSea PrOdUCtiOn SyStem
由水下井口、水下基盘及管汇、水下储油中心、输油中间站等整套水下生产设备及海底管道组成的 海上油气生产系统O
2.1.5
早期生产系统 early PrOdUCtiOn SyStem ; EPS
利用已有的少数勘探井、试油井和快速改装完成的采油设施先行生产,提前获得经济收益,有时也 结合进行延长测试,以期进一步探明油藏,为最终制定油田开发方案提供有价值的油层资料的海上油气 生产系统或生产与测试系统O
2.1.6
单井石油生产系统 Singk Wen Oil PrOdUCtiOn SyStem;SWOPS
采用水下井口及动力定位生产储油船(兼作运输油船将原油运回港口)进行海上石油早期生产与延 长测试的海上石油生产测试系统O
2.1.7
集输系统 gathering and tranSPOrtatOn SyStem
将各油井的井液加以汇集并输送给油气处理装置的系统O
2.1.8
储油系统 Oil StOrage SyStem
为海上石油生产系统所产原油提供缓冲储存的系统O
GB/T 14090—2020
2.2平台
2.2.1
平台 PIatform
用于海上油气资源勘探与开发的结构物O
注:平台由上部结构、设施与设备、支承结构等组成。
2 . 2 . 2
自升式平台jack-up PktfOrm
具有活动桩腿且其主体能沿支撑于海底的桩腿升至海面以上预定高度进行作业,并能将主体降回 海面和回收桩腿的平台O
2.2.3
柱稳式平台 COIUmn-StabiliZed PlatfOrm
用立柱或沉箱将上壳体连接到下壳体或桩靴上的平台O漂浮作业时下壳体或桩靴潜入水中,部分 立柱露岀海面,为半潜状态;坐底作业时下壳体或桩靴坐落在海底下,部分立柱露岀海面为坐底状态O 2 . 2 . 4
坐底式平台 bottom-mounted PlatfOrm
只适合于浅水作业,作业时下壳体坐落在海底上,并由立柱支承海面以上上壳体全部重量的平台O
2.2.5
水面式平台 SUrfaCe PlatfOrm
具有单个或多个船形或驳船形排水型浮体构造,在漂浮状态下作业的平台O
2.2.6
自航平台 SeIf-PrOPeIled PlatfOrm
不需要外界帮助而能自行迁航的平台O
2.2.7
非自航平台 nOn-self-PrOPeIkd PlatfOrm
需要外界帮助而迁航的平台O
2.2.8
钻井平台 drilling PlatfOrm
设有钻井设备,可在海上进行钻井作业的平台O
2 . 2 . 9
井 口平台 WeIlhead PIatfOrm
甲板上设有采油井口,可在海上进行油气采集的平台O
2 . 2 . 10
生产平台 PrOdUCtiOn PlatfOrm
设有油、气、水处理装置,可在海上进行油、气、水分离及处理的平台。
2 . 2 . 11
储油平台 Oil StOrage PIatfOrm
具有储油设施,可在海上为生产平台所生产的原油提供缓冲储存的平台O
2 . 2 . 12
输油平台 transfer PlatfOrm
供停靠穿梭油船并将原油输送到船上运走的固定式平台。
2.2.13
油区终端平台 field terminal platform
作为油气开发区平台群中的终端站,通过单点系泊装置或其他形式的输油、装油设施将油气开发区 生产和储存的原油输送出去的平台。
2 . 2 . 14
修井平台 workover PaItfOrm
结构型式与悬臂型自升式钻井平台相似,专用于对油井施行井下作业使油井恢复或增加产量的 平台。
2.2.15
生活平台 accommodation PlatfOrm
专用于在海上为人员提供起居及生活设施的平台。
2.2.16
火炬台 flare platform
将油气处理过程中分离岀的少量天然气引至火炬塔顶放空燃烧的专用平台。
2.2.17
竖筒型采油平台 UPright-PiPe oil extraction PlatfOrm
结构外形型式为圆筒形,竖直安装在海上,用于海上采油的平台。
2.2.18
固定式平台fixed Platform
通过打桩、扩展底座或其他方式支承于海底,并在一定时期内保持固定的平台。
2 . 2 . 19
桩基平台 Pik-SUPPOrted PhItfOrm
以桩作为支承结构的平台。
2 . 2 . 20
导管架平台jacket PbItfOrm
上部结构与设施以导管架及桩作为支承结构的平台。
2 . 2 . 21
基盘式平台 temPlate PlatfOrm
导管架和预先安装并固定于海底的水下基盘连为一体的平台。
2. 2. 22
单立柱平台 monoPod Platform
上部结构架设在一根大直径塔柱上的平台。
2. 2. 23
重力式平台 gravity PhItfOrm
利用自身重量大、重心低等特点稳坐于海底进行作业的平台。
2. 2. 24
混凝土重力式平台 COnCrete gravity PlatfOrm
由钢筋混凝土建造,具有钻井、采油、储油和输油等多种功能的大型重力式平台。
2. 2. 25
塔式平台 tower PlatfOrm
以格栅形混凝土沉箱(兼作储油罐)作基础,向上伸岀2〜4根空心混凝土柱支撑上部结构的大型重
GB/T 14090-2020
力式平台。
2.2.26
移动式平台mobile platform
能重复实现就位、起浮、移航等操作以改变作业地点的平台。
2.2.27
移动式钻井平台 mobile drilling PktfOrm
能重复实现就位、起浮、移航等操作以改变作业地点的钻井平台。
2.2.28
坐底式钻井平台 SUbmerSibk drilling PktfOrm
钻井时坐落于海底,起浮后可拖航至另一地点作业的移动式钻井平台。
2.2.29
自升式钻井平台 jack-UPdriIiing PIatfOrm
由上部结构、桩腿及升降机构等组成,钻井作业时桩腿支承于海底,上部结构升至水面以上一定高 度,浮于水面时可拖航至另一作业地点的移动式钻井平台。
2.2.30
沉垫型自升式钻井平台 mat jack-up drilling PlatfOrm
所有桩腿下端连接于一个大面积公共沉垫的自升式钻井平台。
2.2.31
桩靴型自升式钻井平台footing jack-uP drilling PhItfOrm
每一桩腿下端均设有一个桩靴的自升式钻井平台。
2.2.22
悬臂型自升式钻井平台 CantileVerjaCk-UP drilling PbItfOrm
井架及钻台安装在悬臂结构上,且能沿轨道滑移到平台甲板以外一定距离进行钻井的自升式钻井 平台。
2 . 2 . 33
槽口型自升式钻井平台 slot jack-UP drilling PhItfOrm
为使钻柱从钻台向下通过甲板直达海底进行钻井,将甲板结构做成凹形槽口的自升式钻井平台。
2 . 2 . 34
倾斜桩腿型自升式钻井平台Slant Ieg jack-uP driliing PlatfOrm
为增大桩腿在海底的间距以改善平台稳定性,将桩腿斜置的自升式钻井平台。
2.2.5
半潜式钻井平台 Semi-SUbmerSibk driliing PlatfOrm
具有潜没在水下的浮体(下体或沉箱)并由立柱连接浮体和上部甲板,作业时处于漂浮状态的钻井 平台。
2 . 2 . 36
柱稳半潜式钻井平台 COIUmn StabiiiZed Semi-SUbmerSibk drilling PhItfOrm
由上部结构、立柱与浮垫或桩靴等组成,大部分浮体深潜于水面以下,依靠立柱的小水线面保证漂 浮稳性,并在波浪中具有良好运动性能的移动式钻井平台。
2 . 2 . 37
双下浮垫柱稳半潜式钻井平台 twin Pontoon COIUmn StabiiiZed Semi-SUbmerSibk dril∏ng PhItfOrm
为简化结构及改善移航性能,将下部结构设计成两个前后向的箱形或其他形状浮体的柱稳半潜式
钻井平台O
2.2.38
桩靴柱稳半潜式钻井平台 SPUd Can COIUmn StabiliZed Semi-SUbmerSibIe drilling PIatfOrm
每一立柱下端设一桩靴作为主要浮体的柱稳半潜式钻井平台O
2 . 2 . 39
柱稳半潜式生产平台 COlUmn StabiiiZed Semi-SUbmerSibk PrOdUCtiOn PaltfOrm
在海上进行油气生产的柱稳半潜式平台O
2 . 2 . 40
顺应式结构 COmpIiant StrUCtUre
利用拉索、张力腿、万向接头等构件,对结构物在外载荷作用下产生的六个自由度的运动加以某种 限制与约束,以满足定位与运动要求的半固定式结构O
2. 2. 41
拉索塔 guyed tOwer
以塔形桁架及桩作为支承结构,同时采用多根系泊钢索从塔形桁架四周拉住以保证风浪中稳定性 的深水顺应式结构O
2. 2. 42
张力腿平台 tenSOn leg platfOrm ; TLP
利用平台浮力大于结构自身重力从而与预张力平衡,并由张力腿对结构进行约束的海洋平台O
2. 2. 43
人工岛 artificial iS∣and
在浅水区采用沉箱结构、泥沙吹填等方法建成的岛式油气生产基地O
2. 2. 44
深吃水单立柱式平台SPAR PlatfOrm
具有垂直单立柱浮体并被多根系泊缆固定在海底的深吃水浮式海洋平台。
2.3海洋工程船和浮式装置
2. 3. 1
钻井船 drilling ShiP
设有钻井设备,能在系泊定位或动力定位状态下进行海上钻井作业的船O
2. 3. 2
中心系泊定位钻井船 Center mOOred drilling ShiP;tUrret mOOred drilling ShiP
将定位用系泊线系到船体中央的转筒下方,船体可绕转筒旋转,使作用在船体上的风浪流外力减至 最小,以改善定位与运动性能从而提高钻井效率的系泊定位钻井船O
2. 3. 3
散射系泊定位钻井船SPread mOOring drilling ShiP
依靠船体四周呈辐射状分布的多根系泊线进行定位的钻井船O
2. 3. 4
动力定位钻井船 dynamC POSitiOning drlliing SIiiP
依靠自动控制动力定位装置使船体保持所需位置进行钻井作业的船O
GB/T 14090—2020
2.3.5
钻井供应船 drilling tender
为钻井平台供应钻管、泥浆、水泥、燃料、备品等物资,有时也提供人员居住舱室的船O
2.3.6
钻井驳 drilling barge
设有钻井设备,一般在浅水域进行钻井作业的驳船。
2.3.7
储油船 oil Storage tanker
作为海上储存原油或成品油的油库,或作为单点系泊的输油终端,或为生产平台提供储存原油及向 穿梭油船卸油的,具有一定储油量的船O
2.3.8
浮式生产储油船 floating PrOdUCtiOn, StOrage and offloading ; FPSO
具有油气处理、原油储存和外输功能的浮式装置O
2 . 3 . 9
浮式钻井生产储油船 floating driliing & PrOdUCtiOn StOrage oil tanker
具有钻井勘探和生产储存功能的钻井船和浮式生产储油船的结合体O
2 . 3 . 10
生产储油船 PrOdUCtiOn StOrage tanker ; o∏ PrOdUCtiOn and StOrage VeSSeI
用作油气处理及原油储存的船O
2 . 3 . 11
生产测试船 PrOdUCtiOn test ship
进行海上石油早期生产及延长测试的船O
2 . 3 . 12
穿梭油船 ShUttIe tanker
在生产油田和岸边终端站或炼油厂之间作定期往返的运输油船O
2 . 3 . 13
自升自航式起重船 Sel f-elevating Sel f-ProPel led VeSSel ; Sel f-elevating Sel f-ProPel l ed iift-boat;Sel f-
ekvating Selt-PrOPelled Crane VeSSei
带有推进系统,具有自升能力、较强的起重和运输能力,用于近海工程服务的船O
注:自升自航式起重船鱼当为驳船O
2.3.14
守护船 Stand-by ShiP
设有救助及医疗设备,为钻井平台执行看守、值班及协助抛锚起锚等作业的辅助船O
2 . 3 . 15
铺管船 PiPelaying VeSSei
专用于铺设海底管道的船O
2 . 3 . 16
三用 工作船 tUg, anChor handling and SUPPIy VeSSei
拖曳钻井平台转移井位,协助就位和起、抛锚作业,以及向钻井平台与生产平台供应钻管、泥浆、水 泥、燃油、钻井用水等生产物品和食品、淡水等生活补给品的船O
2 . 3 . 17
固井船 Wei l Cementing ShiP
设有水泥储存舱、水泥搅拌机、水泥泵以及供安装管具、填料用的机械设备,带有足够的水泥与淡水
进行固井作业的船。
下水驳 launching barge
船型为平底平甲板,甲板上设有导管架专用下水滑道及摇臂机构,将坐落在下水滑道上的导管架滑 移到水中的驳船。
2 . 3 . 19
起重、多用途自升式驳船 heavy iift, multi-purpose jackup barge
主要用于浅海、大陆架的海上油气开发新建项目的安装、运输等辅助作业,通常具有自航推进能力, 动力定位系统,配有3-4个桩腿,能够升降,船上设有生活模块、直升飞机平台、重型起重机,可搭载大 型海上模块,并通过滑移系统将模块安装到海上平台的工程驳船。
2. 3. 20
修井驳 workover barge
配备各种修井设备的小型驳船。
2. 3. 21
载管驳PiPe barge
为辅管船运载及供应钢管的驳船。
2. 3. 22
铺管驳 PiPelaying barge
可在近海、内河、沼泽地等区域进行管道铺设、架接等作业的浅吃水驳船。
2. 3. 23
卷筒铺管驳reel barge
将卷绕在大直径卷筒上的钢管从船上铺设到海底的驳船。
2. 3. 24
埋管驳 pipe-burying barge
借助于船载埋管机完成埋管作业的驳船。
2.3.25
浮式装置 installation ; floating UnU ; floating installation
用于油气生产、处理、存储、货物转载或其他用途的船舶、装置或结构物。
2.3.26
驳船型浮式装置 barge-type floating Unit;barge-type floating installation
无自航能力的船型结构浮式装置。
2.3.27
船型浮式装置 ship-type floating unit;ship-type floating installation
具有自航能力的船型结构浮式装置。
2.3.28
浮式生产储油装置 floating PrOdUCtiOn StOrage Unit ; floating oil PrOdUCtiOn and StOrage Unit ; FPSU
具有油气处理及原油储存功能的浮式装置。
2.4操作状态g
2.4.1
自由漂浮状态 free floaiing COndUiOn
海洋工程结构或海洋工程船舶依靠浮力无约束地漂浮于水面的状态。
GB/T 14090—2020
2.4.2
系泊状态 moored Condition
海洋工程结构或海洋工程船舶在单点系泊系统或其他系泊方式的约束下漂浮于水面的状态O
2.4.3
锚泊状态 anchored COndniOn
海洋工程结构或海洋工程船舶在锚泊系统的约束下漂浮于水面的状态O
2 . 4 . 4
迁移状态 transit COndttiOn
海洋工程结构或海洋工程船舶借助于自航、拖航、装运等方式从一个地点转移到另一个地点的 状态O
2.4.5
拖航状态 towing COndniOn
自由漂浮状态的海洋工程结构或无推进装置的海洋工程船舶在海上被拖带,从一个地点转移到另 一个地点的状态零
2.4.6
坐底状态 SUPPOrted on the Sea bed COnditiOn
坐底式、重力式平台等坐落于海底,经过地基预压操作后的坐底作业状态和坐底生存状态O
2.4.7
作业状态 OPeratmg COndniOn
海洋工程结构物在作业现场进行正常作业,承受与正常作业相应的环境载荷及作业载荷的状态O
2.4.8
生存状态 SUrViVal COndniOn
海洋工程结构物根据预报即将遇到极端恶劣的环境条件采取中止正常作业和提高安全性的各种措 施,使其处于抗风暴的态势,以及在风暴环境中承受与生存环境条件相应的载荷的状态。
2 . 4 . 9
安装状态 instaliing COndniOn
海洋工程结构物在安装地点处于驳船上下水、就位、打桩以及安装上部结构与设施等海上安装作业 的状态O
2 . 4 . 10
试验状态 test COnditiOn
海洋工程结构与设施在建造完成后进行试验时的状态。
2 . 4 . 11
升降状态 jaCking COndniOn
自升式平台在就位或撤离井位时,进行桩腿升或降、上部结构升或降、注入压载水进行地基预压等 一系列操作时的状态O
2 . 4 . 12
插拔桩状态 SPUd driving and PUning COnditiOn
自升式平台在就位时,依靠平台自重插桩,然后利用压载水进行地基预压,使桩腿处于稳定位置;撤 离井位时,通过喷冲装置用大量海水对桩下土壤进行喷冲消除土的吸附力后进行拔桩的状态O
2.4.13
预压状态 PreIoading Condition
自升式平台就位时,坐底式、重力式平台坐落海底时,用海水压载的方法对地基进行预压,使平台及 地基在生存状态具有足够稳定性的操作状态O
2 . 4 . 14
沉浮状态 ascending and descending COndUiOn
坐底式、重力式平台就位或撤离时,平台处于自由漂浮和坐底相互转变的状态O
2.4.15
冲桩 WaSIiing out Pile
通过喷冲装置用大量海水对桩腿或沉垫下面的土壤进行喷冲消除土壤对结构的吸附力,使桩腿易 于拔起或沉垫易于浮起的操作O
2.5建造与安装
2 . 5 . 1
上驳refuge
结构物从制造场地装上运载驳船的过程O
2 . 5 . 2
运输 transportation
结构物装在船上进行海上运输的过程O
2 . 5 . 3
下水 launching
导管架自运载驳船至水中的过程O
2 . 5 . 4
扶正 UPrighting
导管架下水后的就位过程O
2 . 5 . 5
吊装 lifting
导管架、模块等结构吊运安装的过程O
2.5.6
拖移towing
移动式平台或漂浮结构物拖运至预定位置的过程O
2.5.7
钻井 driiiing
从水面向地下钻凿井孔的过程O
2.5.8
修井 intervention; Weii i ntervent ion;Weii repa i r;workover intervention
使油井恢复正常生产或提高油井产量所进行的各种工作的统称O
2. 5. 9
完井 Weii COmPietiOn
井眼与油气储集层(产层、生产层)连通的工序O
注:该工序为从钻开油气层开始,到下生产套管、注水泥固井、射孔、下生产管柱、防砂、排液直至投产的过程。
GB/T 14090—2020
3总体与结构
3.1环境条件及载荷
3.1.1
环境资料 environmental data
水文条件(水深、潮位、流速、流向、波高、周期、波向、海冰、冰温、水温)、气象条件(风速、风向、气温、 雪覆盖、结冰)及地震、海生物、工程地质(地质、地貌、海床土壤)等环境条件的实测资料、可靠的观测资 料和统计结果O
3 . 1 . 2
自然环境条件 envronmental COndniOnS
海洋工程结构在建造或使用期间可能遇到的风、浪、潮、流、冰、地震、海啸、雨、雪、雾、霜、温度、湿 度、工程地质、海水腐蚀、海生物附着、水深等条件。
3 . 1 . 3
环境参数 envronmental ParameterS
有关各种自然环境条件的参数O
注:例如波浪的参数包括波高、周期、波向以及波谱等。
3 . 1 . 4
重现期 recurrence PeriOd
再次岀现比给定的波高、风速、流速等更为严重的情况所需的概率平均年数O
3.1.5
有效波高 SignifiCant WaVe height
将所有连续测量的波高按大小排列,取其总个数的三分之一大波波高的平均值O
3.1.6
跨零周期 ZerO-UP-CrOSSing PeriOd
两个相邻波浪在平衡位置处的平均时间间隔O
3.1.7
波谱 WaVe SPeCtrUm
波浪位移的方差谱、波倾角谱、波数谱的统称O
注:一般指反映各成分波的有关量相对于频率的分布情况的波浪位移的方差谱。
3.1.8
水面高程 Water level elevatwn
海洋工程结构所在地点受潮位等影响而岀现的水位O
3 . 1 . 9
特征潮位 CharaCteriStiC tide IeVelS
海洋工程常用的极端高(低)潮位、天文高(低)潮位、平均高(低)潮位等有代表意义的潮位O
3 . 1 . 10
环境设计衡准 enviι∙Onmental deSign Criterm
在确定海洋工程结构的设计环境条件时,对环境参数的重现期及环境载荷的组合等所持的原则和 标准。
3.1.11
设计环境条件 design environmental ConditionS
作业环境条件与生存环境条件的总称O
3 . 1 . 12
作业环境条件 OPerating envronmental COndUiOnS
按海洋工程结构的主要功能和各种操作要求确定的,能实现安全作业的一组环境参数上限值O
3 . 1 . 13
生存环境条件 SUrViVaI environmental COndUiOnS
在海洋工程结构的工作寿命内,对结构产生最不利影响的环境条件组合以及代表最恶劣环境条件 的一组环境参数上限值O
3 . 1 . 14
安装环境条件 installing envronmental COnditiOnS
海洋工程结构在海上安装作业期间能实现安全作业的一组环境参数上限值O
3.1.15
作业水深 OPerating Water depth
海洋工程结构作业时所能达到的水深或水深范围O
3.1.16
设计水深 deSign Water depth
作为设计要求提岀的海洋工程结构的作业水深或水深范围O
3.1.17
设计温度 deSign temperature
构件钢材等级选择时的基准温度,并根据平台预期作业海域的气象资料假定等于日平均气温年最 低值在平台设计期限内(至少20年)的平均值O
3.1.18
飞溅区 SPIaSh zone
海洋工程结构在潮汐和波浪作用下干湿交替的区域O
3. 1. 19
全浸区 SUbmerged zone
飞溅区以下包括海水和海底面及其以下的区域O
3. 1. 20
大气区 atmoSpheric zone
飞溅区以上的区域O
3. 1. 21
2 区 zone 2
平台或海上设施周围500 m以内的海床区域O
3. 1. 22
1 区 zone 1
平台或海上设施周围2区以外的海床区域O
3. 1. 23
海底冲刷 SeanOOr Scour
海洋工程结构接触海底处,土壤受海流冲击作用而发生运移的现象O
GB/T 14090—2020
3.1.24
环境载荷 environmental IOad
由风、浪、潮、流、冰、雪、地震等自然环境条件直接引起的载荷O
3.1.25
风载荷Wind load
风作用在海洋工程结构水面以上部位所产生的载荷O
3.1.26
波浪载荷 WaVe Oad
波浪运动作用在海洋工程结构上所产生的载荷O
3.1.27
海流载荷 CUrrent Oad
海流作用在海洋工程结构上所产生的载荷O
3.1.28
冰载荷ice Oad
冰作用在海洋工程结构上所产生的载荷O
注:包括大面积冰原整体移动引起的作用力、流冰的冲击力以及温度变化、水位涨落引起的载荷。
3 . 1 . 29
地震载荷 earthquake Oad
地震引起海洋工程结构物基础运动所产生的载荷O
3 . 1 . 30
作业载荷 OPeratmg Oad
海洋工程结构在使用期间所承受的环境载荷以外的其他载荷O
3.1.31 零
活载荷live Oad
施加在结构上的人群、物料和交通工具载荷和自然产生的载荷O
3 . 1 . 32
固定载荷 dead Oad
在某一操作状态恒定不变的载荷O
注:包括海洋工程结构自身重量、静水浮力、永久性压载、土的静压力等。
3 . 1 . 33
可变载荷 Variabk Oad
在操作状态缓慢地变化其位置及大小的载荷O
注:例如需移动位置或撤走的钻井及生产设备、人员及供应品、各种材料、储存舱及压载舱中的液体以及生产作业 中的消耗品等。
3 . 1 . 34
动载荷 dynamic Oad
大小、方向或位置随时间改变,并对结构有显著动力影响的载荷O
3 . 1 . 35
变形载荷 deOrmatOn Oad
结构变形引起的载荷O
注:例如温度变化、地基沉降、相邻结构变形引起的载荷。
3.1.36
意外载荷 accidental IOad
由于意外环境条件或平台事故而产生的,在平台使用年限内岀现几率较小的载荷O
3.1.37
生存环境载荷 SUrViVaI environmental load
满足生存环境条件相应的载荷O
3.1.38
作业环境载荷 OPerating envronmental load
满足作业环境条件相应的载荷O
3 . 1 . 39
甲板设计载荷design deck load
用于确定甲板结构尺寸而设定的各种状态下甲板最大均布载荷、线载荷或集中载荷的设计值O
3.2性能和结构分析
3 . 2 . 1
举升能力 jacking CaPaCity
自升式平台在作业地点利用平台升降机构将上部结构举升至设计要求高度的能力O
3 . 2 . 2
气隙 air gap
设计波浪的波峰与上部结构底部之间的最小间隙O
3 . 2 . 3
桩贯入深度 PHe PenetratiOn
桩沉入土中的深度O
3.2.4
海床地基承载力 bearing CaPaCny of the Sea bed
海床地基单位面积上所能承受的载荷O
3.2.5
风压 Wind PreSSUre
垂直于气流方向的平面所受到的风的压力。
3 . 2 . 6
升力 lift ; lfft force ; elevating force
流体通过机翼状结构,由于结构上下表面流场的不对称产生上下表面流体的速度差,进而导致的气 压差O
3 . 2 . 7
拖曳力 drag force
物体在流体中有相对运动时,所受到的与相对运动速度相反的流体作用力。
3 . 2 . 8
附连水质量add Water mass
物体在流体中作加速运动时,促使一部分流体也作加速运动,导致所需作用力增大所体现的物体质 量增量O
3 . 2 . 9
P-犢 曲线 P-犢 CUrVe
表示桩土体系的侧向位移与反力特征的曲线O
GB/T 14090-2020
T-Z 曲线 T-Z CUrVe
表示桩土体系的垂向位移与摩擦阻力特征的曲线。
3 12 111
P-B 曲线 P-B CUrVe
表示桩土体系的垂向位移与端承力特征的曲线。
3 12 112
群桩效应 Pile group effect
密集的桩所造成的对水动力性能的影响或桩土体系间的相互影响。
3 12 113
坐底稳定性 Sit-On-bottom Stabiiity
平台在坐底状态下抗倾覆和抗滑动的能力。
3 12 114
抗倾稳定性 Stabinty against OVertUrning
海洋工程结构物抵抗外力矩倾覆作用的能力。
3.2.15
抗滑稳定性 Stabnny against Siiding
海洋工程结构物抵抗水平力作用所造成的滑移的能力。
3.2.16
地基整体稳定性 ground general Stabnny
海洋工程结构物的地基在整体上抵抗倾覆和滑移的能力。
3.2.17
初稳性 initial Stabnny
船舶或海洋平台倾斜角度小于10。〜15。或上甲板边缘开始入水前(取其小者)的稳性。
3.2.18
破损稳性 damage Stabnny
船舶或海洋平台破损后,依靠其自身倾斜后的复原力矩,在规定的外加风力作用下仍能保持不再继 续进水的能力。
3 . 2 . 19
完整稳性 intact Stabnny
漂浮着的船舶或海洋平台依靠倾斜后其自身的复原力矩来抵抗外加倾覆力矩的能力。
3 . 2 . 20
在位分析 in p]ace ana]ySiS
对平台使用期间,承受作业载荷和环境载荷作用条件下结构受力所作的分析。
3 . 2 . 21
装船分析 ShiPPing analySiS G
对导管架、模块等结构物从制造场地装到船或平台过程中的结构强度所作的分析。
3 . 2 . 22
上驳分析 Oadout ana]ySiS
对导管架、模块等结构物从制造场地装上运载驳船过程中的结构受力所作的分析。
3.2.23
运输分析 transportation analysis
对导管架、模块等结构物装在船上进行海上运输过程中的结构受力所作的分析O
3 . 2 . 24
下水分析 IaUnCIimg analysis
对导管架、模块等结构物自运载驳船下水过程中的运动轨迹和结构受力所作的分析O
3.2.25
扶正分析 UPrighting analysis
对导管架、模块等结构物下水后,在扶正就位过程中的运动轨迹和结构受力所作的分析O
3.2.26
吊装分析 Iifting analysis
对结构物吊装过程中的结构受力所作的分析O
3.2.27
拖航分析 towing analysis
对移动式平台或漂浮结构物在拖运至预定位置过程中的运动和结构受力所作的分析O
3.2.28
确定性疲劳分析 determiniStiCfatigUe analysis
以确定性设计载荷进行疲劳累积损伤计算的疲劳分析O
3 . 2 . 29
随机性疲劳分析 random fatigue analysis
以随机性设计载荷进行疲劳累积损伤计算的疲劳分析O
3 . 2 . 30
谱疲劳分析 SPeCtraI fatigue analyss
通过谱密度函数描述海况,用概率统计方法求岀结构应力范围和应力循环次数来进行疲劳累积损 伤计算的疲劳分析O
3 . 2 . 31
强度水平地震分析 Strength level earthquake analysis
为使结构物满足中等重现期地震时的强度要求而进行的地震分析O
3 . 2 . 32
延性水平地震分析 ductiiity IeVeI earthquake analysis
在罕见的强烈地震作用下允许结构物岀现某些永久变形,但不致倒塌的工况下的结构分析O
3 . 2 . 33
时域法动力分析 time domain of dynamic analysis
根据作用在结构上的外力在时域内求解每一瞬时各节点的位移、构件的内力和应力值的动力分析 方法O
3 . 2 . 34
频域法动力分析 frequency domain method of dynamC analysis
将与时间有关的外力,用与频率有关的调和函数来表示,利用结构的频率响应函数来求解节点位 移、构件内力和应力值的动力分析方法O
3 . 2 . 35
波浪力线性化 iineariZatiOn of WaVe force
将波浪力中的非线性项进行线性化处理,从而求解结构的运动和受力的方法O
GB/T 14090—2020
热点应力 hot SPOt StreSS
结构突变处最大应力点的应力O
3.2.37
重量控制 Weight COntrOl
为了确保平台完工状态满足设计性能参数,在开发、设计、采办、建造过程中对平台重量、重心进行 管理、控制的过程O
3.3结构
3 . 3 . 1
关键构件 CritiCaI member
破坏时可能导致整个平台毁坏,而且其应力往往因形状复杂或加工不当而可能超过计算值的构件。
3 . 3 . 2
重要构件 Primary member
破坏时不会很快地使整个平台毁掉,但在其修复之前平台无法正常使用的构件。
3 . 3 . 3
次要构件 SeCOndary member
破坏时不会影响平台的使用,而且易于修复的构件。
3 . 3 . 4
有骨材壳体 framed Shen;Stiffened Shen
用环形强框架、舱壁或适当的隔板保证其强度和稳定性的带骨材的壳体结构O
注:有骨材壳体适用于立柱、沉垫或浮垫、桩靴的结构设计。
3.3.5
无骨材壳体 Unframed Shen
用环形强框架、舱壁或适当的隔板保证其强度和稳定性而不设骨材的壳体结构O
注:无骨材壳体适用于立柱、沉垫或浮垫、桩靴的结构设计。
3 . 3 . 6
上部结构 SUPerStrUCtUre;UPPer StrUCtUre;topSide
位于桩腿、立柱或框架上方且由其直接支承的结构物O
3 . 3 . 7
立柱 COlUmn
半潜式平台或坐底式平台上连接上部结构和浮垫的柱形结构O
3.3.8
桩腿Ieg
支承在海底,并利用升降装置升降平台上部结构的筒形或桁架结构O
3 . 3 . 9
沉垫mat
将各桩腿或立柱下端连接起来的整体水密箱形底部结构O
3 . 3 . 10
浮筒 POntOOn
为半潜式平台提供浮力的船形或筒形底部结构O
3.3.11
桩靴 SPUd Can
自升式平台每个桩腿下端用于增大海底支承面积的独立的浮体O
3 . 3 . 12
抗滑桩 SPUd for anti-SliP
为保证沉垫坐底时不偏离井位而设置的插入土中的抗滑结构物O
3 . 3 . 13
裙板 Skirt plate
自升式平台、坐底式平台和重力式平台的沉垫、桩靴和底板周围设置插入土中,以减少水流对地基 土的冲刷并且防止滑移的围板O
3 . 3 . 14
主桁 main girder
上部结构中,由底板、甲板和侧板组成,连接桩腿围井的箱形结构强力构件。
3.3.15
导管架jacket
由穿过其腿柱或套筒的钢管桩与海底牢固连接的,用钢管焊成的空间构架O
3.3.16
模块支承桁架 module SUPPOrt frame
位于导管架顶部,支承上部甲板和设施的钢桁架O
3.3.17
井口基盘temPlate
放置在海底,用于保护油井井口,并为平台就位导向,保证井口正确回接的钢质构架O
3.3.18
导管架腿柱jacket Ieg
用于传递整个平台的水平载荷的导管架的钢管柱O
3 . 3 . 19
弦杆chord
弦管ChOrd (被取代)
作为构架的主构件,导管架整体结构中的腿柱,或是节点中的连接的大直径主管O
3. 3. 20
撑杆brace
将主要构件组成一个空间构架的管状或其他形状的连接构件,或在节点中与弦杆相交的其他构件。
3. 3. 21
管节点 tubular joint
由一个或多个作为撑杆的圆管焊接到作为弦杆的圆管表面形成的节点。
注:一般包括简单节点、搭接节点和其他复杂节点,是导管架的关键部位。
3.3.22 S
简 单节点 SimPIejOmt
撑杆相互不搭接,圆管内外不设加劲板或隔板的节点O
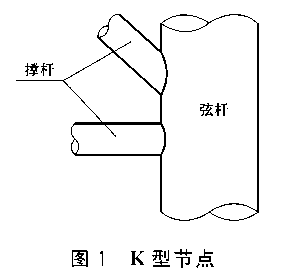
3. 3. 23
K型节点K joint
两根撑杆轴力垂直于弦杆方向的分力在弦杆轴线一侧平面内自身平衡的节点O
GB/T 14090-2020
结构型式见图Io
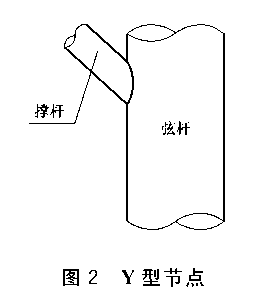
3 . 3 . 24
Y型节点Y joint
一个节点平面内斜撑杆的与弦杆垂直的内力分量需由弦杆平衡的节点。
结构型式见图2。
3.3.25
T型节点T joint
一个节点平面内垂直撑杆的垂直于弦杆的内力分量需由弦杆平衡的节点。
结构型式见图3。
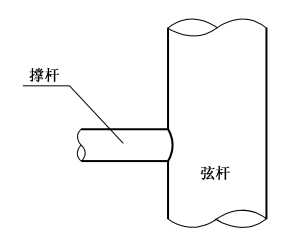
图3 T型节点
3.3.26
X型节点X joint
弦杆轴线一侧的撑杆轴力必须与另一侧撑杆轴力相平衡的节点。
结构型式见图4。
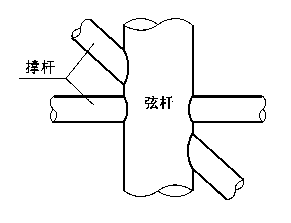
图4 X型节点
3.3.27
搭接节点 OVerIaPPing joint
两根撑杆一部分相互焊接,一部分与弦杆焊接而形成的节点。
结构型式见图5。
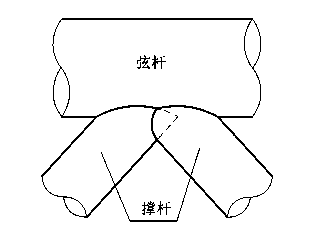
图5搭接节点
3.3.28
厚壁筒节点heavy Wan joint
为满足冲剪和疲劳强度要求,局部弦杆筒壁加厚并采用抗层状撕裂的高强度特种钢材的节点。
3 . 3 . 29
带垫板节点 gusset joint
撑杆端部与弦杆之间焊有加劲板的节点。
3 . 3 . 30
外环加强节点 external ring joint
弦杆外壁焊有环形加劲板的节点。
3 . 3 . 31
内环加强节点internal ring joint
弦杆内壁焊有环形加劲板的节点。
3 . 3 . 32
锥形过渡段 COniCaltranSitiOn
连接节点处直径增大的弦杆和原直径弦杆的锥形管段。
3 . 3 . 33
下水桁架 IaUnClimg truss
为保证管架在制造厂和驳船上水平放置,滑行时能足以承担滑道的反力,在导管架滑行方向上设置
的节间细密的桁架。
GB/T 14090—2020
3.3.34
开口钢管桩 OPen end Steel PiIe
桩尖不封闭的钢管桩O
3.3.35
模块 module
整个系统的设备和设施组装在钢构架内,整体运输和吊装的集装块O
3.3.36
撬装块Skid
设备和管系组装在公共底盘上,整体运输和吊装的集装块O
3.3.37
防沉板mud mat
泥垫mud mat (被取代)
为保证导管架在打桩之前稳定地坐在泥面上而设在导管架底部的钢垫板O
3.3.38
隔水套管 COndUCtOr tube
底部固定在海底,将钻杆等与海水隔离的护管。
3 . 3 . 39
隔水导管构架COndUCtOr frame
为隔水导管提供侧向支承并沿平台高度方向分层布置的水平构架O
3 . 3 . 40
风敏结构 Wind SenSitiVe StrUCtUre
易与风动力载荷产生共振的结构物O
3.3.41 缪
桩基 Pile fOundatOn
通过桩将平台各种载荷传递至地基的基础结构O
3 . 3 . 42
侧向承载桩 laterally IOaded Piie
承受与轴线垂直的侧向载荷作用力的桩O
3 . 3 . 43
导向板 guiding Plate
在自升式钻井平台中,位于升降齿条箱齿条通道两侧,为保证桩腿齿条与升降系统单元有效地啮 合,对齿条提供导向作用的钢板。
注:通常对硬度有特殊的要求。
3 . 3 . 44
耐磨板 Wear PrOOfing Piate
位于齿条板上端,与齿条频繁接触,具有良好的耐磨性和硬度的钢板O
3 . 3 . 45
悬臂梁 CantikVer beam
位于主体结构之上,在钻井作业时,可以通过滑移系统伸岀主体结构之外,不作业时,可以回收的钻 台的主要支撑结构。
注:通常为箱型结构。
3.3.46
升降基础结构 jackcase foundation StrUCtUre
自升式钻井平台中,与平台的主体结构相连接的升降单元、锁紧系统的支持结构,也是将桩腿与主 体结构相连接的接口O
3.3.47
钻台 drilling floor
用于支持井架、其他钻井设备的平台结构。
注:通常四周配有挡风墙。
3.3.48
底座结构 SUbStrUCtUre
支撑钻台的支持结构O
3 . 3 . 49
饺接柱 articUiated COiUmn;articUiated tower
用絞接接头连接到海底重力基础或桩基础,在近水面处设有浮力舱或浮筒的管结构或桁架结构O
3.3.50
直升机平台 helicopter PlatfOrm
供直升机停放、起飞和降落的平台O
3. 3. 51
月池 moon pooi
平台中央用于水下作业的通海孔O
3. 3. 52
井口回接结构 SUbSea tieback StrUCtUre
保证安装过程中导管架准确就位并提供井口保护的结构O
4系统与设备
4.1定位系统
4. 1. 1
定位系统 POSitiOning SyStem
能使偏离预定位置的海上浮体(船舶或浮式装置)回复到原位,并不断保持在预定位置上的系统O
注:一般为电子与机械的组合系统。
4. 1. 2
动力定位系统 dynamc POSitiOning SyStem
借助动力自动保持海上浮体(船舶或浮式装置)处于预定位置或保持预定航线的定位系统O
注:该系统的位置检测系统测得浮体受外力(风、浪、流等)干扰而发生方位偏移的信息,经控制系统信息处理后发 出操纵指令,由推力器系统产生相应于消除方位偏移的推力,使浮体复回原位的自动控制方法。
4. 1. 3
位置检测系统 POSitiOn detecting SyStem
检测海上浮体(船舶或浮式装置)在风、浪、流等外力作用下发生方位偏移的系统O
4. 1. 4
推力器系统thrUSter SyStem
动力定位系统中的推力器按照控制指令发岀推力抵消干扰力作用的系统O
GB/T 14090—2020
4.1.5
锚泊定位 anchor moored POSitiOning
用锚及锚链(缆)将船舶或浮式装置系留于海上,限制风、浪、流等外力引起的漂移,使其保持在预定 位置上的定位方法O
4.1.6
散射锚泊系统 SPread anchoring SyStem
用散布于四周的,固定于海底的多根锚链(缆)共同将一船舶或浮式装置系留于海上,使其保持在预 定位置上的锚泊系统O
4.1.7
多浮筒系泊系统 multi-buoy mooring SyStem
以多个系泊浮筒共同将一船舶或浮式装置系留于海上,使其保持在预定位置上的系泊系统O
4.1.8
锚桩 anchor pile ; SPUd
打入海底用以固定锚链(缆)的桩O
4 . 1 . 9
吸力锚桩 SUCtiOn anchor
利用抽吸方法形成的负压压入海底土壤中,作为锚泊固定点的封顶空心圆柱桩O
4 . 1 . 10
重力锚 gravity anchor
主要依靠自身的重量固定于海底,能够承受垂直和水平载荷的锚O
4 . 1 . 11
埋入锚 burial anchor
埋入海底土壤中依靠土体的重量和剪切强度增大固定力的锚O
4 . 1 . 12
定位能力 StatiOnkeeliing ability
借助于定位系统将船舶或浮式装置保持在海上停泊地的能力。
4.1.13
监控圈 WatCh CirCle
动力定位的船舶或浮式装置在海上进行钻井作业时,为保持作业正常进行而将其水平位移控制在 一定范围内的以钻孔中心为圆心的圆形区域O
注:监控圈的半径一般按水深的百分数规定。
4.2单点系泊
4 . 2 . 1
单点系泊 Singk point mooringS ; SPM
允许系泊船舶随盛行风和海况的变化围绕单个系泊点自由回转,以使其保持处于风、浪、流合阻力 最小位置的系泊。
注:有时也将单点系泊装置或单点系泊系统简称为单点系泊。
4 . 2 . 2
单点系泊系统 Singie point mooringS SyStem
储油船或浮式装置与单点系泊作永久性或解脱式连接所组成的系统O
4.2.3
单点系泊装置 single POint mooring Unit
在海底管道和系泊船舶(海水浮式装置、油船等)间提供一种联系,可供输送流体货物用的系泊和转 运装置。
4 . 2 . 4
固定式单点系泊装置fixed SingIe point mooring Unn
由一个架式或圆柱式的塔与基础组成且固定在海底的单点系泊装置。
4.2.5
浮式单点系泊装置 floating Smgk point mooring Unit
由一套柔性锚腿(如锚链、钢丝绳、纤维缆等)和浮体组成且锚泊于海底的单点系泊装置。
4.2.6
桩式系泊塔 Pned mooring tower
用桩固定于海底的塔状固定式单点系泊装置。
4.2.7
重力式系泊塔graVny mooring tower
用重力基础固定于海底的塔状固定式单点系泊装置。
4.2.8
悬链锚腿系泊装置 Catenary anchor Ieg mooring ; CALM
以若干根呈辐射状布置的悬链锚腿(一般为锚链)将一浮筒系至固定于海底的锚或桩上的单点系泊 装置。
4. 2. 9
垂直锚腿系泊装置 VertiCaI anchor Ieg mooring ; VALM
以有预张力的锚腿垂直将一浮筒系于海底的固定基础上的单点系泊装置。
4. 2. 10
单锚腿系泊装置 SingIe anchor Ieg mooring ; SALM
以单根有预张力的锚腿与固定于海底的基础相连接的单点系泊装置。
4. 2. 11
作业区域 OPeratiOnarea
船舶靠离单点系泊时,以中心位置为原点,半径至少等于单点系泊拟系泊的最大船舶总长的三倍, 需要经过的区域。
4. 2. 12
刚臂式单锚腿系泊装置 Singk anchor Ieg mooring With rigid arm ; SALMRA
以刚性臂或鲍架与系泊船舶相连接的单锚腿系泊装置。
4. 2. 13
混合刚臂式单锚腿系泊装置hybrid SALMRA
在刚臂式单锚腿系泊装置中加设悬链系统,使整个系泊装置的回复力部分由浮力产生,部分由悬链 的链重产生的混合式的单点系泊装置。
4. 2. 14
扼塔式单锚腿系泊装置 yoke tower SingIe anchor leg mooring
锚腿为一塔形的浮力结构,其下段为一刚性立管,上段为一竖立的圆柱形浮筒,立管底端与海底基 础相絞接,浮筒顶部则以一刚性鲍架与系泊船舶相絞接的单锚腿系泊装置。
GB/T 14090-2020
立管转塔式系泊装置riser turret mooring
立管的上端通过万向架与转塔结构中的轴承相连接,在立管的水下适当部位连接着一组固定于海 底的悬链,使立管转塔结构竖立于海中一定位置上,整个装置的回复力由立管的浮力和悬链的链重产 生,立管的底部连接着水下软管的单点系泊装置。
4.2.16
饺接立管转塔式系泊装置artkuɪated riser turret mooring
立管顶端与系泊船舶之间絞接一刚性鲍架,立管底端连接着一组悬链的立管转塔式系泊装置。
4.2.17
浮筒式转塔系泊装置buoyant turret mooring;BTM
转塔结构位于船首内部,支承悬链的系泊浮筒位于转塔底部,转塔与悬链锚腿系泊相组合的单点系 泊装置。
4.2.18
柔性扼架悬链腿系泊装置 Catenary anchor ɪeg mooring With soft yoke
系泊浮筒和系泊船舶之间采用鲍架和锚链进行柔性连接,适用于浅水的悬链锚腿系泊装置。
4 . 2 . 19
内转塔式单点系泊装置internal turret mooring
由悬链线、系链浮台、转塔、流体输送旋转接头、光电滑环以及其他辅助设施等组成,其转塔结构位 于船艄内部的单点系泊装置。
4 . 2 . 20
扼架yoke
在单点系泊装置的转台(或立管顶部的万向架)与系泊船舶之间起连接作用,并传递两者之间所有 力和力矩,具有絞接端部的刚性构架。
4 . 2 . 21
转台 turntable
设在单点系泊装置顶部,由滚柱轴承支承,可让系于其上的船舶按风标特性旋转的部件。
4 . 2 . 22
万向架 gimbal table
在水平面内有一对正交轴,并允许绕着正交轴自由转动的,用于在立管与鲍架之间形成一个絞接接 头,以适应系泊船舶纵摇、横摇、纵荡运动的类似于万向接头的机械装置。
4.2.23
锚腿 anchor Ieg
单点系泊装置的上部浮体与海底基础固定点之间的连接构件。
注:可为圆管、锚链、钢丝绳、纤维绳或桁架结构等。
4 . 2 . 24
系泊旋转接头mooring SWiVeI
单点系泊装置中可绕竖轴转动的部件与相对静止的部件之间能传递系泊载荷的旋转连接装置。
4 . 2 . 25
流体输送旋转接头fluid transfer SWiVeI ; FTS
单点系泊装置中保证旋转和固定部件之间的过渡段有一定压力的流体(油、气、水等)无泄漏连续输 送的流体管系动与静部分连接装置。
4.2.26
快速连接解脱接头 quick connect/disconnect COUPIer;QCDC
在紧急情况下既可使系泊船舶迅速从单点系泊装置上脱开,又可在恢复连接时迅速回接的装置。
4.2.27
配重块 CIUmP Weight
在浮式单点系泊系统中,为使悬链线获得所要求的系泊特征而在悬链线上配挂的混凝土或铁制块 状物。
4.2.28
回转区域半径 turning CirCle radius ; SWing CirCle radius
处于最低潮位时,系泊船舶在作业系缆载荷作用下与单点系泊装置的回转中心之间的距离,即系缆 长度的水平投影、单点系泊装置设计系泊的最大船舶的总长,以及适当的安全裕量三者之和。
4 . 2 . 29
回转区域 turning CirCle ; SWing CirCIe
系泊船舶绕着系泊点按回转区域半径回转时所扫过的海上区域。
4.2.30
操纵区域 maneuvering area
为确保船舶进行靠离单点系泊装置时的操纵安全,根据所在海区情况确定的围绕单点系泊装置有 最小半径要求的海上区域。
4.3结构配套设备
4 . 3 . 1
水下设备 SUbSeaeqUiPment
海上钻井装置各种水下作业设备的总称。
4 . 3 . 2
运动补偿设备 motion COmPenSatiOn eqiiipment
在漂浮状态下进行钻井作业的平台或船舶为克服在风、浪、流等外力作用下产生的各种运动(在水 平面内的漂移以及垂荡、横摇等)对钻柱及水下设备的工作状态所造成的不利影响而设置的补偿装置的 总称。
4 . 3 . 3
钻柱运动补偿器 drill String COmPenSatOr ; DSC
消除浮式钻井装置在波浪中的垂荡运动对钻柱工作的影响,以便稳定钻压和平稳下放套管、油管及 防喷器的装置。
4 . 3 . 4
垂荡补偿器 heave COmPenSatOr
浮式钻井装置为消除在波浪中的垂荡运动对钻柱及安装其他水下设备的影响而设置的装置与 设备。
4.3.5
水平位移补偿器 horizontal dS>Placement COmPenSatOr
浮式钻井装置为减缓在波浪中的水平面内飘荡运动对水下设备(主要是隔水套管)的影响而设置的 运动补偿设备。
GB/T 14090—2020
4.3.6
隔水管张力器riser tensioners
浮式钻井装置为保证隔水管的正常工作而设置的能补偿在波浪中的垂荡运动,以及能使隔水管保 持受到一定大小的张力的装置O
4.3.7
导向索 guiding line
供起、下隔水套管、防喷器或水下设备时使用的导向钢索。
4.3.8
导向索恒张力器 Permanent guiding line tensioners
安置在导向索水面一端,保证导向索始终处于合适的张紧状态的装置O
4 . 3 . 9
伸缩节 telescopic joint
为解决浮式钻井装置的隔水管垂荡补偿而将其上部设计成具有内、外筒体且可以相互伸缩的管节O
4 . 3 . 10
胶管张力器 pod iine tensioners
使含有许多液压控制管线的胶管(控制软管)处于一定的张力状态的张紧装置O
4 . 3 . 11
升降装置 jacking SyStem
设置在自升式平台桩腿和平台主桁交接处,使桩腿和平台作相对升降运动的机械装置O
4.3.12
楔块装置 Wedge浮足m
为使自升式平台的桩腿和平台本体在进入作业状态或拖航前相互紧密固定而在两者间隙内压入楔 块的机械装置O
4 . 3 . 13
折臂式吊机folding arm Crane
吊臂由几段连接而成,可通过液缸折叠的吊机O
4 . 3 . 14
防喷器 blow out PreVenter
安装在井口装置上,在钻井、完井、试井和修井作业时用于控制套管和钻杆间环空或空井压力的 装置O
4.3.5
气体分离器 gas SeParatOr
采油时通过降压达到分离油、气、水,初步处理原油的压力容器O
4 . 3 . 16
火炬塔 flare tower; flare boom
支撑火炬头的立式结构物O
注:火炬塔通常为钢管桁架结构,垂直或倾斜安装在平台甲板上,其高度根据允许火炬辐射热的强度确定。
5海底管道
5.1类型
5 . 1 . 1
海底管道系统 SUbmarine PiPeime SyStem
GB/T 14090—2020
用于输送石油、天然气及其他流体产品的海底管道工程设施的所有组成部分的总称O
注:包括海底管道、立管、支撑构件、配管附件、防腐系统、加重层、泄漏检测系统、报警系统、应急关闭系统和与其相 连的海底装置等。
5.1.2
海底管道 SUbmarine PiPeline
系统中,于最大潮汐期间处于水面以下的管道(立管除外)。
注:该管道可能全部或部分悬跨于海床上或放置于海底或埋设于海底面以下,与岸上管道相连的接岸部分的管段 亦作为海底管道的一部分。
5.1.3
立管 riser
连接浮式结构上生产或钻井设备与海底管道、水下设施或油气层的管道O
单点系泊装置连接上部浮体与海底基础固定点之间的一段竖立的管形受力构件。
注:立管分为刚性立管和柔性立管,仅刚性立管可作受力构件。
5. 1. 4
夕卜立管 external riser
未提供有效掩蔽而直接受到风、波浪、海流和海冰作用的立管O
5. 1. 5
内立管 internal rser
受到有效掩蔽保护,不直接受到风、波浪、海流和海冰作用的立管O
5.1.6
膨胀弯管 expansion looP
能够吸收海底管道膨胀或收缩的弯管O其形状有L形、N形和U形O
5.1.7
管道接岸段 PiPeime ShOre-approach
位于接岸潮差带的管段O
5.1.8
保温管道 hot oil iine
输送已被加热的重质黏性京油或燃料油,在输送过程中管道内一直保持适宜输送温度的管道O
5.1.9
双层管 double PiPe
能够保持输送介质温度,且结构为内、外两层钢管的管道O
注:内层为输送管,外层为保护套管,内、外管之间的环隙填充保温绝缘介质。
5. 1. 10
水下管汇 manifold
具有一个或几个岀口,并装有阀和监控各管道中流体情况仪表的多根管道交汇的组合体O
5. 1. 11
水下管汇中心 manifold Center
水下采油系统的集输站O
5. 1. 12
管道末端管汇 PiPeiine end manfold
装于海底管道端部,经短管与输油软管连通的管汇。
GB/T 14090—2020
出油(气)管道 flowline
水下采油系统中直接输送从井口产岀的原油(气)的管道O
5 11 114
集输管道 gathering and transPOrtatiOn line
水下采油系统中,将油气从各油井和油罐集输到管汇中心的岀油(气)专用管道O
5 11 115
集输中心 gathering and transportation Center
多个生产平台或水下井口岀油(气)管道的集节点O
5.1.16
埋设管道 buried PiPeiine
埋设在海底泥面以下的海底管道O
5.1.17
裸置管道UnbUrkd PiPeiine 從
放置在海底或悬跨于其上而不埋入海底泥面以下的海底管道O
5.2设计
5 . 2 . 1
路由勘测route SUrVey
为铺设海底管道选择最佳线路而进行的勘察性调查和测量O
注:一般包括对水文、气象、地形地质特征、浅层地质剖面、海底土壤特性和海底障碍物等的调查和测量。
5 . 2 . 2
管道路由 PiPeime route
海底管道的实际轴线在海底的线路O
5 . 2 . 3
在位稳定性 on bottom StabnUy
管道铺设在海床上、预开的管沟内或埋入土壤中,在重力、浮力、海流力、波浪力以及土壤摩擦力等 因素影响下,于垂直方向及水平方向的稳定程度O
5 . 2 . 4
水击压力 SUrge PreSSUre
管道内部流体流速的突变引起的流体对管壁的局部冲击压力O
5 . 2 . 5
引发压力 initiation PreSSUre
导致海底管道管壁上已存在的局部屈曲或凹陷进一步扩展的外部压力。
5 . 2 . 6
传播压力 PrOPagatiOn PreSSUre
管道屈曲传播已经产生后,继续维持屈曲在管道中传播的外部压力。
5 . 2 . 7
悬空段长度SUSPended Iength
管道中无支承管段的长度O
5.2.8
约束管道 restrained Iine
由于受到固定支座或管子与土壤间摩擦力的约束而在轴向不能自由膨胀或收缩的管道O
注:在管道设计中,可作为受约束管道考虑。
5 . 2 . 9
非 约束管道 UnreStrained Iine
轴向约束力可忽略的管道O
注:在管道设计中,可作为没有约束的管道考虑。
5 . 2 . 10
埋设深度Iaying depth
管道埋置在海底泥面以下的深度O
5.3材料与附件
5.3.1
涂层 COating
涂覆或包敷于钢质管道内部和外部的保护层O
注:包括防腐涂层和加重层。
5 . 3 . 2
夕卜涂层 external COating
涂覆于钢管外部金属表面的防腐涂层O
5 . 3 . 3
内涂层 internal COatmg
涂覆于钢管内部金属表面的防腐涂层O
5 . 3 . 4
配重层 Weight COating
为保持管道在海底的稳定性,并抵抗所处环境偶然载荷的撞击包敷在防腐涂层外增加管道重量的 涂层O
注:该涂层的材料主要是钢筋混凝土或钢丝网水泥。
5. 3. 5
现场接头涂层field joint COating
海底管道在海上现场组装焊接后,于其焊接接头处补口的涂层O
5.3.6
保温层insuIatOn
为保持正常的介质输送温度,包覆于输送管外的隔热层O
5.3.7
立管管卡 riser CIamP
用螺栓将立管紧固在平台导管架腿柱上的卡箍O
5. 3. 8
立管支撑件riser SUPPOrt
将立管固定在平台上的构件,或立管的局部或连续的导向构件。
GB/T 14090—2020
5.3.9
清管器 PiPeline inspection gadget; Pig
穿管器PIg (被取代)
借助于本身动力、油流或气流推动下在管腔内运动,清洁管壁并监测管道内部状况的工具O
5 . 3 . 10
扫线清管器CIeaning Pig
用于清扫海底管道内部施工或生产过程残留物的清管器。
5 . 3 . 11
定径清管器gauging Pig
用于检查施工或作业中管道内径是否符合要求的清管器O
5 . 3 . 12
检测清管器instrument Pig
用于检测和记录管子内壁的任何不规则变化和破损情况的清管器O
5 . 3 . 13
清管器收发装置Pig traPs
连接在海底管道系统上发送和回收清管器的装置O
5 . 3 . 14
管道封头CaP
铺设海底管道时,为防止海水进入管道并使管道具有一定浮力而焊于第一根管子端部的圆盖形钢 制封头O
5 . 3 . 15
止屈器 buckle arrestor
为防止屈曲沿管道长度方向的传播,在管道上安装的局部加强件。
5.3.16
应急关闭系统 emergency ShUtdOWn SyStem
管道输送系统中,可在紧急情况下应急关闭系统关闭部分或全部输送线,保持待命状态的备用安全 系统O
5.4施工
5 . 4 . 1
铺管参数 PiPe Iaymg ParameterS
铺管过程中控制管道应力和变形的基本参数O
5 . 4 . 2
管道标志 PiPeime identification
显示管道所处位置的标记。
注:一般使用浮标等浮具。在管道施工期间,常使用管道标志显示管道预定铺设路线的位置。
5 . 4 . 3
管段连接tie-in
海底管道管段之间,海底管道与立管之间在海上的对接连接O
5 . 4 . 4
拖管法tow method
在陆上预制场内将管子组装焊接成管段,其后由拖管船或其他牵引设备将管段拖至海上预定的线
GB/T 14090—2020
路,再在海上进行连接的管道铺设方法O
5.4.5
底拖法 bottom tow method
管段一直着落海底被拖至预定位置的拖管方法O
5.4.6
近底拖法 off-bottom tow method
管段悬于接近海底面的高度被拖至预定位置的拖管方法O
5.4.7
定深拖法 below-surface tow method
管段沿水下一定深度被拖至预定位置的拖管方法O
5.4.8
水面拖法 SUrfaCe tow method
管段漂浮于水面被拖至预定位置的拖管方法O
5. 4. 9
铺管船法 PiPelaying VeSSeI method
在铺管船上将管段逐根接长,并焊接接头和涂覆接头涂层,然后通过张紧器,由船尾斜滑道徐徐地 将管道往海底铺设的海底管道铺设方法O
5. 4. 10
卷筒铺管船法 reel barge method
先在陆上将一定长度预制好的管子连续地卷绕在卷筒上,并吊装到卷管船的固定架上O卷筒铺管 船抵达海上现场后,将管子从卷筒上退卷,经校直后,通过张紧器、船尾斜滑道将其铺设到海底的海底管 道铺设方法O
5. 4. 11
S型铺管法S-Iay
利用张力器将管线沿水平方向通过悬挂在船体外的托管架入水,并达到指定位置,形成一条S形曲 线的海底管道铺设方法O
5. 4. 12
张紧器tensioner
为了减少管道铺设时的弯曲应力,在铺管滑道处设置的能使管子处于拉伸状态的机械夹紧装置O
5.4.13
托管架Stinger
安装在铺管船尾部支撑焊好的管道并逐步将管道下放至海底的刚性或絞接斜架O
5. 4. 14
J 型管 J-tube
为铺设立管而预先在平台上安装的直径大于立管直径的“J”形导管O
注:施工时,利用卷扬设备将立管从J型管中拉到指定位置。
5. 4. 15
管沟 PiPe ditch
根据海底管道埋设要求在海床上开挖的埋管沟槽O
GB/T 14090-2020
开沟 trenching
在海床上开挖埋管沟槽的作业。
5.4.17
喷射挖沟埋管法jetting method
通过埋管驳拖带靠磁力骑跨在海底管道上的拖埋器喷射高压水或高压气,将砂子和泥液从管道下 部冲开,形成沟槽,并通过吸管将冲开的砂子和泥液吸走;管子沉入沟槽后,可通过海流或波浪的运动将 排在管沟槽旁的泥砂回填,以埋设管沟内的管子的施工方法。
5.4.18
液化埋管法 fluidization method
将大量的水强注到管子周围的土壤中,并利用埋管机的振动,使土壤液化,减少土壤密度而使管子 沉入砂土中的施工方法。
5 . 4 . 19
机械开沟法 mechanical cutting method
利用机械设备对海床进行开沟的施工方法。
5 . 4 . 20
开沟犁法 plowingmethod
通过工程船拖带海底开沟犁,将海底犁岀管沟的施工方法。
5. 4 . 21
回填 back fill
管道放入管沟后,用砂土料填没管沟的作业。
5. 4 . 22
定径板rigid disc
铺管时放置在铺设管道与海底面接触点之后适当距离的管段内,检验管子屈曲情况的刚性圆板。
5.4.23 譲
拖管头 PUiiinghead
拖管法铺设海底管道时,连接在被牵引管道的端头上,并在系缚牵引缆索的眼孔,使管道牢固地与 牵引缆索联结,并将牵引力传递给管壁的管道牵引专用件。
5. 4 . 24
锚定 anchorage
利用锚杆或螺旋锚杆固定海底管道,使之能抵御波浪、潮流以及浮力等作用,保持管道在海底的稳 定性的措施。
5. 4 . 25
弃管 PiPe abandon
管道海上施工过程中,因海洋气候的突变等原因不得不中断施工时,暂时将管道弃置于海底的 作业。
注:作业时管道经封堵放入海底并系以浮标,以便再次施工时易于寻找和回收。
5 . 4 . 26
收管 PiPe retrieval
回收被弃置于海床上的管道的作业。
汉语拼音索引
A
安装环境条件.................................3.1.14
B
半潜式钻井平台..............................2.2.35
变形载荷.......................................3.1.35
冰载荷..........................................3.1.28
波浪力线性化.................................3.2.35
波浪载荷.......................................3.1.26
波谱................................................3.1.7
驳船型浮式装置..............................2.3.26
C
采油平台(被取代)...........................2.2.10
操纵区域.......................................4.2.30
槽口型自升式钻井平台 .....................2.2.33
侧向承载桩....................................3.3.42
插拔桩状态....................................2.4.12
沉垫................................................3.3.9
沉垫型自升式钻井平台.....................2.2.30
沉浮状态.......................................2.4.14
撑杆.............................................3.3.20
冲桩.............................................2.4.15
出油(气)管道.................................5.1.13
初稳性..........................................3.2.17
储油平台.......................................2.2.11
穿梭油船.......................................2.3.12
船型浮式装置.................................2.3.27
D
搭接节点 .......................................3.3.27
大气区..........................................3.1.20
带垫板节点....................................3.3.29
单立柱平台....................................2.2.22
单锚腿系泊装置..............................4.2.10
单腿平台.......................................2.2.22
导管架..........................................3.3.15
导管架平台....................................2.2.20
导管架腿柱....................................3.3.18
导向板..........................................3.3.43
底盘式平台(被取代)........................2.2.21
底座结构.......................................3.3.48
地基整体稳定性..............................3.2.16
地震载荷.......................................3.1.29
吊装分析.......................................3.2.26
定径板..........................................5.4.22
定径清管器....................................5.3.11
定位能力.....................毎............4.1.12
动载荷..........................................3.1.34
GB/T 14090-2020
扼架.............................................4.2.20
扼塔式单锚腿系泊装置.....................4.224
F
防沉板..........................................3.3.27
防喷器..........................................4.3.14
飞溅区..........................................3.1.18
风敏结构.......................................3.3.40
风载荷..........................................3.1..5
浮式生产储油装置...........................2.3.28
G
隔水导管构架.................................3.3.39
管道末端管汇.................................5.1.12
管沟.............................................5.4.15
管节点..........................................3.3.21
H
海底冲刷.......................................3.1.23
海流载荷.......................................3.1.27
厚壁筒节点....................................3.3.28
环境设计衡准.................................3.1.10
环境载荷.......................................3.1.24
回填.............................................5.4.21
回转区域.......................................4.2.29
回转区域半径.................................4.2.28
混合刚臂式单锚腿系泊装置...............4.2.13
混凝土层(被取代)..............................5.3.4
混凝土重力式平台...........................2.2.24
活载荷..........................................3.1.31
火炬塔..........................................4.3.16
火炬台..........................................2.2.16
J
机械开沟法....................................5.4.19
基盘式平台....................................2.2.21
集输管道 .......................................5.1.14
集输系统..........................................2.1.7
集输中心.......................................5.1.15
加重层 .............................................5.3.4
甲板设计载荷.................................3.1.39
监控圈 ..........................................4.1.13
检测清管器....................................5.3.12
捡管(被取代).................................5.4.26
简单节点.......................................3.3.22
胶管张力器....................................4.3.10
铉接立管转塔式系泊装置..................4.2.16
GB/T 14090-2020
絞接塔(被取代)..............................3.3.49
铉接柱..........................................3.3.49
井口回接结构 .................................3.3.52
井口基盘.......................................3.3.17
就位分析(被取代)...........................3.2.20
卷筒铺管驳....................................2.3.23
卷筒铺管船法.................................5.4.10
K
开沟.............................................5.4.16
开沟犁法.......................................5.4.20
开口钢管桩....................................3.3.34
抗滑稳定性....................................3.2.15
抗滑桩..........................................3.3.12
抗倾稳定性....................................3.2.14
可变载荷.......................................3.1.33
快速连接解脱接头...........................4.2.26
锚碇(被取代).................................5.4.24
锚固(被取代).................................5.4.24
锚腿.............................................4.2.23
锚桩................................................4.1.8
模块.............................................3.3.35
模块支承桁架.................................3.3.16
N
耐磨板 ..........................................3.3.44
内环加强节点.................................3.3.31
内转塔式单点系泊装置.....................4.2.19
泥垫(被取代).................................3.3.37
拉索塔..........................................2.2.41
立管转塔式系泊装置........................4.2.15
流体输送旋转接头...........................4.2.25
裸置管道.......................................5.1.17
M
埋管驳..........................................2.3.24
埋入锚..........................................4.1.11
埋设管道.......................................5.1.16
埋设深度.......................................5.2.10
锚泊定位 ..........................................4.1.5
锚泊状态..........................................2.4.3
锚定.............................................5.4.24
配重块..........................................4.2.27
喷射挖沟埋管法..............................5.4.17
频域法动力分析..............................3.2.34
破损稳性.......................................3.2.18
铺管驳..........................................2.3.22
铺管船..........................................2.3.15
谱疲劳分析....................................3.2.30
Q
起重、多用途自升式驳船 .....................2.3.19
气体分离器....................................4.3.15
弃管.............................................5.4.25
牵索塔(被取代)..............................2.2.41
强度水平地震分析...........................3.2.31
撬装块..........................................3.3.36
倾斜桩腿型自升式钻井平台...............2.2.34
清管器收发装置..............................5.3.13
GB/T 14090-2020
全浸区..........................................3.1.19
确定性疲劳分析..............................3.2.28
裙板.............................................3.3.13
群桩效应.......................................3.2.12
R
热点应力 .......................................3.2.26
人工岛..........................................2.2.43
S
设计环境条件 .................................3.1.11
升降装置 .......................................4.3.11
升降状态 .......................................2.4.11
生产测试船 ....................................2.3.11
生存环境载荷.................................3.1.37
拾管(被取代).................................5.4.46
收管.............................................5.4.46
双下浮垫柱稳半潜式钻井平台............2.2.37
水下管汇.......................................5.1.10
水下管汇中心.................................5.1.11
顺应式结构....................................2.2.40
顺应式平台(被取代)........................2.2.40
随机性疲劳分析..............................3.2.29
T
塔式平台.......................................2.2.25
托管架..........................................5.4.13
拖管头..........................................5.4.23
拖航分析.......................................3.2.27
W
外环加强节点.................................3.3.30
完整稳性.......................................3.2.19
万向架..........................................4.2.22
X
系泊旋转接头.................................4.2.24
GB/T 14090-2020
下水 ................................................2.5.3
下水驳..........................................2.3.18
下水分析.......................................3.2.24
下水桁架.......................................3.3.33
弦杆.............................................3.3.19
弦管(被取代).................................3.3.19
小倾角稳性....................................3.2.17
楔块装置.......................................4.3.12
修井驳..........................................2.3.20
修井平台.......................................2.2.14
悬臂梁..........................................3.3.45
悬臂型自升式钻井平台.....................2.2.32
悬空段长度 .......................................5.2.7
悬链锚腿系泊装置 ..............................4.2.8
Y
延性水平地震分析...........................3.2.32
液化埋管法....................................5.4.18
移动式平台....................................2.2.26
移动式钻井平台..............................2.2.27
意外载荷.......................................3.1.36
应急关闭系统.................................5.3.16
油区终端平台.................................2.2.13
预压状态.......................................2.4.13
月池.............................................3.3.51
运输分析.......................................3.2.23
Z
载管驳..........................................2.3.21
在位分析.......................................3.2.20
张紧器..........................................5.4.12
张力腿平台....................................2.2.42
折臂式吊机....................................4.3.13
直升机平台....................................3.3.50
止屈器 ..........................................5.3.15
重力锚..........................................4.1.10
重力式平台....................................2.2.23
重量控制.......................................3.2.37
主桁.............................................3.3.14
柱稳半潜式生产平台........................2.2.39
柱稳半潜式钻井平台........................2.2.36
转台.............................................4.2.21
桩基.............................................3.3.41
桩基平台.......................................2.2.19
桩靴.............................................3.3.11
桩靴型自升式钻井平台.....................2.2.31
桩靴柱稳半潜式钻井平台..................2.2.38
装船分析.......................................3.2.21
锥形过渡段....................................3.3.32
自升式钻井平台..............................2.2.29
自升自航式起重船 ...........................2.3.13
钻台.............................................3.3.47
GB/T 14090—2020
作业环境条件.................................3.1.12
作业环境载荷.................................3.1.38
作业区域.......................................4.2.11
作业水深.......................................3.1.15
坐底式钻井平台..............................2.2.28
K型节点.......................................3.3.23
P-B 曲线.......................................3.2.11
S型铺管法.......................................5.4.11
SPAR 平台.......................................2.2.44
T型节点..........................................3.3.25
T-Z 曲线..........................................3.2.10
X型节点 .......................................3.3.26
Y型节点 .......................................3.3.24
1 区................................................3.1.22
2 区................................................3.1.21
英文对应词索引
accidental IOad ...................................................................................................... 3.1.36
accommodation PIatfOrm .......................................................................................... 2.2.15
anchor leg ............................................................................................................ 4.2.23
anchorage ............................................................................................................ 5.4.24
artkulated column ................................................................................................ 3.3.49
articukted riser turret mooring ................................................................................. 4.2.16
artkulated tower ................................................................................................... 3.3.49
artificial island ...................................................................................................... 2.2.43
ascending and descending COndUiOn ........................................................................... 2.4.14
atmospherc zone ................................................................................................... 3.1.20
B
back fill ............................................................................................................... 5.4.21
barge-type floating installatOn ................................................................................. 2.3.26
barge-type floaing UnU .......................................................................................... 2.3.26
bearing CaPaCity of the Sea bed
bOw out PreVenter ................................................................................................ 4.3.14
GB/T 14090—2020
bottom-mounted PIatform .......................................................................................... 2.2.4
brace .................................................................................................................. 3.3.20
BTM .................................................................................................................. 4.2.17
buckk arrestor ...................................................................................................... 5.3.15
buoyant turret mooring .......................................................................................... 4.2.17
burial anchor......................................................................................................... 4.1.11
bured IiiPeiine ...................................................................................................... 5.1.16
C
CALM .................................................................................................................. 4.2.8
CantikVer beam ...................................................................................................... 3.3.45
CantikVer jack-up driiiing PiatfOrm ........................................................................... 2.2.32
CaP ..................................................................................................................... 5.3.14
Catenary anchor Leg mooring With soft yoke .................................................................. 4.2.18
chord .................................................................................................................. 3.3.19
Ckaning Pig ......................................................................................................... 5.3.10
CiUmP Weight ......................................................................................................... 4.2.27
COlUmn StabiiiZed Semi-SUbmerSibk drii∏ng PlatfOrm ...................................................... 2.2.36
COiUmn StabiiiZed Semi-SUbmerSibie PrOdUCtiOn PiatfOrm ................................................... 2.2.39
COmPIiant PIatform (被取代)....................................................................................2.2.40
COmPiiant StrUCtUre ................................................................................................ 2.2.40
COnCrete gravity PiatfOrm .......................................................................................... 2.2.24
COndUCto frame ................................................................................................... 3.3.39
COndUCtOr tube ...................................................................................................... 3.3.38
COniCai tranSition ................................................................................................... 3.3.32
Crnkai member ...................................................................................................... 3.3.1
CUrrent ioad ......................................................................................................... 3.1.27
D
damage Stabnny ................................................................................................... 3.2.18
dead ioad ............................................................................................................ 3.1.32
deformation ioad ................................................................................................... 3.1.35
deSign deck ioad ................................................................................................... 3.1.39
deS⅛n envronmentai COndniOnS ................................................................................. 3.1.11
deSign temPerature ................................................................................................ 3.1.17
GB/T 14090—2020
design Water depth ................................................................................................ 3.1.16
deterministk fat⅛ue anaIySiS .................................................................................... 3.2.28
dril∏ng floor ......................................................................................................... 3.3.47
ductiiity IeVeI earthquake analySiS .............................................................................. 3.2.32
dynamic load ......................................................................................................... 3.1.34
dynamic POSitiOning dril∏ng ShiP
E
earthquake load...................................................................................................... 3.1.29
emergency ShUtdOWn SyStem ....................................................................................... 5.3.16
environmental deSign criteria .................................................................................... 3.1.10
envronmental load ................................................................................................ 3.1.24
external ring joint................................................................................................... 3.3.30
F
field terminal platform .......................................................................................... 2.2.13
fixed platform ...................................................................................................... 2.2.18
fixed SingIe POint mooring UnU
flare boom ............................................................................................................ 4.3.16
flare PlatfOrm ...................................................................................................... 2.2.16
GB/T 14090—2020
flare tower............................................................................................................ 4.3.16
floating drilling & PrOdUCtiOn StOrage oil tanker
floating installation ................................................................................................ 2.3.25
floating oil PrOdUCton and StOrage UnU ........................................................................ 2.3.28
floating PrOdUCtiOn StOrage Unit ................................................................................. 2.3.28
floating PrOdUCtion, StOrage and offloading
floaing SingIe Point mooring UnU
floating Unit ......................................................................................................... 2.3.25
flowiine ............................................................................................................... 5.1.13
fluid tranSfer SWiVeI ................................................................................................ 4.2.25
fluidization method ................................................................................................ 5.4.18
folding arm Crane ................................................................................................... 4.3.13
footing jaCk-UP dril∏ng PlatfOrm .............................................................................. 2.2.31
FPSU .................................................................................................................. 2.3.28
frequenCy domain method of dynamk analySis ............................................................... 3.2.34
FTS .................................................................................................................. 4.2.25
G
gaS SeParatOr ......................................................................................................... 4.3.15
gathering and tranSPortation Center ........................................................................... 5.1.15
gathering and tranSPortation line .............................................................................. 5.1.14
gathering and tranSPortation SyStem
gaUging Pig ......................................................................................................... 5.3.11
gimbal table ......................................................................................................... 4.2.22
gravity anChor ...................................................................................................... 4.1.10
gravity Platform ................................................................................................... 2.2.23
groUnd general Stabiiity .......................................................................................... 3.2.16
gUiding Plate ......................................................................................................... 3.3.43
gUSSet joint ......................................................................................................... 3.3.29
gUyed tower ......................................................................................................... 2.2.41
H
heave COmPenSatOr ................................................................................................... 4.3.4
heavy iift, mult-PUrPOSe jaCkUP barge ........................................................................ 2.3.19
heavy Wan joint ................................................................................................... 3.3.28
GB/T 14090—2020
helicopter PIatfOrm ................................................................................................ 3.3.50
horizontal displacement COmPenSatOr ........................................................................... 4.3.5
hot o i I ∏ne ............................................................................................................ 5.1.8
hot spot StreSS ...................................................................................................... 3.2.36
hybrid SALMRA ................................................................................................... 4.2.13
I
ice load ............................................................................................................... 3.1.28
in PlaCe analysis ................................................................................................... 3.2.20
initial Stabiiity ...................................................................................................... 3.2.17
inStallation ......................................................................................................... 2.3.25
inStaliing environmental COndUiOnS.............................................................................. 3.1.14
inStrument Pig ...................................................................................................... 5.3.12
intact Stabiiity ...................................................................................................... 3.2.19
internal ring joint................................................................................................... 3.3.31
internal turret mooring .......................................................................................... 4.2.19
J
jaCkCase foundation StrUCtUre .................................................................................... 3.3.46
jaCket leg ............................................................................................................ 3.3.18
jaCket PlatfOrm ...................................................................................................... 2.2.20
jaCket .................................................................................................................. 3.3.15
jaCking CaPaCity ...................................................................................................... 3.2.1
jaCking COnditiOn ................................................................................................... 2.4.11
jaCking SyStem ...................................................................................................... 4.3.11
jaCk-uP dril∏ng PlatfOrm .......................................................................................... 2.2.29
jaCk-uP PlatfOrm...................................................................................................... 2.2.2
jetting method ...................................................................................................... 5.4.17
J-tube .................................................................................................................. 5.4.14
K
K joint ............................................................................................................... 3.3.23
L
IateraIy IOaded Pik ................................................................................................ 3.3.42
IaUnChmg ............................................................................................................... 2.5.3
IaUnChmg analysis................................................................................................... 3.2.24
GB/T 14090—2020
IaUnChing barge ................................................................................................... 2.3.18
IaImChilIg truss ...................................................................................................... 3.3.33
IayingdePth ......................................................................................................... 5.2.10
iifting analysis ...................................................................................................... 3.2.26
iineariZatiOn of WaVe force ....................................................................................... 3.2.35
live load ............................................................................................................... 3.1.31
Oadout analysis...................................................................................................... 3.2.22
M
main girder ......................................................................................................... 3.3.14
maneUVering area ................................................................................................... 4.2.30
manfold Center ...................................................................................................... 5.1.11
manfold ............................................................................................................ 5.1.10
mat jack-up drlliing platform .................................................................................... 2.2.30
mat ..................................................................................................................... 3.3.9
mechanical CUtting method ....................................................................................... 5.4.19
mobik dril∏ng PlatfOrm .......................................................................................... 2.2.27
mobile PlatfOrm ................................................................................................... 2.2.26
moduk SUPPOrt frame ............................................................................................. 3.3.16
module ............................................................................................................... 3.3.35
monoPod PlatfOrm ................................................................................................ 2.2.22
moon Pool ............................................................................................................ 3.3.51
mooring SWiVeI ...................................................................................................... 4.2.24
mud mat ............................................................................................................ 3.3.37
從 N non-self-ProPelled Platform
O
Oil-drilling PIatform (被取代).................................................................................... 2.2.10
oil PrOdUCtiOn and StOrage VeSSeI ................................................................................. 2.3.10
oil StOrage Platform ................................................................................................ 2.2.11
GB/T 14090—2020
OPen end Steel PiIe ................................................................................................ 3.3.34
OPerating COnditiOn ................................................................................................... 2.4.7
OPeraiing environmental COndniOnS.............................................................................. 3.1.12
OPerating envrOnmental Oad .................................................................................... 3.1.38
OPerating Oad ...................................................................................................... 3.1.30
OPerating Water dePth ............................................................................................. 3.1.15
OPeratiOn area ...................................................................................................... 4.2.11
OVerlaPPing jOint ................................................................................................... 3.3.27
P
P-B CUrVe ............................................................................................................ 3.2.11
Permanent guiding line tensiOners
PigtraPS ............................................................................................................ 5.3.13
PiIeOundatOn ...................................................................................................... 3.3.41
Pile grOUP effect ................................................................................................... 3.2.12
Piie-SUPPOrted PiatfOrm .......................................................................................... 2.2.19
PiPe abandOn ......................................................................................................... 5.4.25
PiPe barge ............................................................................................................ 2.3.21
PiPe ditch ............................................................................................................ 5.4.15
PiPe retrievai ......................................................................................................... 5.4.26
PiPeburying barge ................................................................................................ 2.3.24
PiPeiaying barge ................................................................................................... 2.3.22
PiPelaying VeSSei ................................................................................................... 2.3.15
PiPenne end maniOld ............................................................................................. 5.1.12
PiOWmg methOd...................................................................................................... 5.4.20
POdiinetenSOnerS ................................................................................................ 4.3.10
POntOOn ............................................................................................................... 3.3.10
PreiOading COndnOn ................................................................................................ 2.4.13
PrOdUCtiOn PiatfOrm ................................................................................................ 2.2.10
GB/T 14090—2020
PrOdUCtiOn StOrage tanker ....................................................................................... 2.3.10
PrOdUCtiOn test ShiP ................................................................................................ 2.3.11
PrOPagatiOn PreSSUre ................................................................................................ 5.2.6
PUning head ......................................................................................................... 5.4.23
P-犢 CUrVe............................................................................................................... 3.2.9
Q
QCDC.................................................................................................................. 4.2.26
quick COnneCt/dSscOnnect COUPIer .............................................................................. 4.2.26
R
randOm fatigue analysis .......................................................................................... 3.2.29
reel barge methOd ................................................................................................... 5.4.10
reel barge ............................................................................................................ 2.3.23
rigid disC ............................................................................................................ 5.4.22
riser Urret mOOring ................................................................................................ 4.2.15
S
SALM ............................................................................................................... 4.2.10
SALMRA ............................................................................................................ 4.2.12
SeanOOr SCOUr ...................................................................................................... 3.1.23
seff-ekvating Seff-PrOPeHed Crane VeSSeI ........................................................................ 2.3.13
seff-ekvating Self-PrOPeIled iif--bOat ........................................................................... 2.3.13
self-elevating Self-PrOPeHed VeSSeI .............................................................................. 2.3.13
Semi-SUbmerSible driIΠng PlatfOrm .............................................................................. 2.2.35
ShiPPing anaIysis ................................................................................................... 3.2.21
ShiPtyPe fOating instaIIatiOn .................................................................................... 2.3.27
ShiPtyPe fOating Unit ............................................................................................. 2.3.27
ShUttIe tanker ...................................................................................................... 2.3.12
S i gn i ficant WaVe he i ght ............................................................................................. 3.1.5
SimPIe jOint ......................................................................................................... 3.3.22
SingIe andwr Ieg mOOring Wnh rigid arm ..................................................................... 4.2.12
GB/T 14090—2020
Singl e anchor I eg mooring ....................................................................................... 4.2.10
Single well oil PrOdUCtiOn SyStem
Sit-On-bottom Stabiiity ............................................................................................. 3.2.13
Skid .................................................................................................................. 3.3.36
Skirt Plate ............................................................................................................ 3.3.13
Slant eg jack-up dri I iing PlatfOrm .............................................................................. 2.2.34
S- Iay .................................................................................................................. 5.4.11
Slot jack-up dri I iing P IatfOrm .................................................................................... 2.2.33
SPar PlatfOrm ...................................................................................................... 2.2.44
SPeCtraI fatigue analySis .......................................................................................... 3.2.30
SPlaSh zone ......................................................................................................... 3.1.18
SPread anchoring SyStem .......................................................................................... 4.1.6
SPread mooring driliing SIiiP ....................................................................................... 2.3.3
SPUd Can column StabnZed Sem-SUbmerSibIe driliing platform .......................................... 2.2.38
SPUd Can ............................................................................................................ 3.3.11
SPUd driving and PUinng COnditiOn .............................................................................. 2.4.12
SPUd for ant-Siip ................................................................................................... 3.3.12
SPUd ..................................................................................................................... 4.1.8
StabnUy againSt OVertUrning .................................................................................... 3.2.14
StabiiityagainStSiiding .......................................................................................... 3.2.15
Stand-by SIiiP ......................................................................................................... 2.3.14
StatiOnkeelimg abiIity ............................................................................................. 4.1.12
Stinger ............................................................................................................... 5.4.13
StrengthieVeiearthqUakeanaiySiS .............................................................................. 3.2.31
SUbmerged zone ...................................................................................................... 3.1.19
SUbmerSibk drii iing PktfOrm .................................................................................... 2.2.28
SUbSea tieback StrUCtUre .......................................................................................... 3.3.52
SUbStrUCtUre ......................................................................................................... 3.3.48
SUPPOrted on the Sea bed COndniOn
GB/T 14090—2020
SUrViVal environmental COnditiOnS .............................................................................. 3.1.13
SUrViVal envronmental load ....................................................................................... 3.1.37
SWing CirCIe ......................................................................................................... 4.2.29
SWing CirCIe radiUS ................................................................................................ 4.2.28
T
T joint ............................................................................................................... 3.3.25
template PlatfOrm ................................................................................................... 2.2.21
template .............................................................................................................. 3.3.17
tenSion Ieg PlatfOrm ................................................................................................ 2.2.42
tenSioner ............................................................................................................ 5.4.12
teSt COndUiOn......................................................................................................... 2.4.10
time domain of dynamic analySS .............................................................................. 3.2.33
TLP .................................................................................................................. 2.2.42
tower platform ...................................................................................................... 2.2.25
towing analySis ...................................................................................................... 3.2.27
tranSfer platform ................................................................................................... 2.2.12
tranSportation analySis ............................................................................................. 3.2.23
trenChing ............................................................................................................ 5.4.16
tubular joint ......................................................................................................... 3.3.21
tug, anChor handing and SUPPIy VeSSeI ........................................................................ 2.3.16
turning CirCIe radiUS ................................................................................................ 4.2.28
tUriiing CirCIe......................................................................................................... 4.2.29
Urntable ............................................................................................................ 4.2.21
tUrret moored dril∏ng ShiP ....................................................................................... 2.3.2
twin pontoon CoUmn StabiIiZed Sem--SUbmerSibIe driliing platform .................................... 2.2.37
T-Z CUrVe ............................................................................................................ 3.2.10
U
UnbUried PiPeime ................................................................................................... 5.1.17
GB/T 14090—2020
UPrighting analySiS ................................................................................................ 3.2.25
UPright-PiPe oil extraction PlatfOrm ........................................................................... 2.2.17
V
Variabk load ......................................................................................................... 3.1.33
W
WaShing oUt Pile ................................................................................................... 2.4.15
WatCh CirCk ......................................................................................................... 4.1.13
WaVe load ............................................................................................................ 3.1.26
Wear Proofing Plate ................................................................................................ 3.3.44
Wedge SyStem ......................................................................................................... 4.3.12
Weight Control ...................................................................................................... 3.2.37
Wen Cementing ShiP ................................................................................................ 2.3.17
Wind load ............................................................................................................ 3.1.25
Wind SenSitiVe StrUCtUre .......................................................................................... 3.3.40
Workover barge ...................................................................................................... 2.3.20
WorkOVer Platform ................................................................................................ 2.2.14
X
X joint ............................................................................................................... 3.3.26
Y
Y joint ............................................................................................................... 3.3.24
yoke tOWer SingIe anChor leg mooring ........................................................................... 4.2.14
yoke .................................................................................................................. 4.2.20
GB/T 14090—2020
Z
ZerO-UP-CrOSSi ng Peri Od ............................................................................................. 3.1.6
ZOne 1 ............................................................................................................... 3.1.22
zone 2 ............................................................................................................... 3.1.21
49