RPI =7 + 3SI

IJ = J伝一狓罕+(狔一^;)2
ICS 25.040.30
J 28
GB/T 38871—2020
General SPeCifiCatiOnS Of mobile manipulator hybrid robots for industrial environment
2020-07-21 发布
2021-02-01 实施
9标志、使用说明书、包装、运输和贮存
11
本标准按照GB/T 1.1-2009给出的规则起草。
本标准由中国机械工业联合会提出。
本标准由全国自动化系统与集成标准化技术委员会(SAC/TC 159)归口 O
本标准起草单位:沈阳新松机器人自动化股份有限公司、中国科学院沈阳自动化研究所、苏州苏相 机器人智能装备有限公司、苏州傲特敏机器人技术服务有限公司、工业信息化部计算机与微电子发展研 究中心(中国软件评测中心)、重庆鲁班机器人技术研究院有限公司、上海沃迪智能装备股份有限公司、 北京机械工业自动化研究所有限公司、东北大学、苏州博众机器人有限公司。
本标准主要起草人:徐方、邹风山、李志海、孙立宁、瞿卫新、尹作重、何国田、杨学志、童上高、姜杨、 苏衍宇、宋吉来、刘世昌、于洪鹏、赵彬、孙铭泽、李樂。
1范围
本标准规定了工业环境用移动操作臂复合机器人产品的组成及分类、性能、技术要求、试验方法、检 验规则、标志、包装、运输和贮存等。
本标准适用于工业一般环境下使用的移动操作臂复合机器人(以下简称机器人)。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 191包装储运图示标志
GB/T 2423.1电工电子产品环境试验 第2部分:试验方法 试验A:低温
GB/T 2423.2电工电子产品环境试验 第2部分:试验方法 试验B:高温
GB/T 2423.3环境试验 第2部分:试验方法 试验Cab:恒定湿热试验
GB/T 2423.55—2006电工电子产品环境试验 第2部分:试验方法 试验Eh:锤击试验
GB/T 4768防霉包装
GB/T 4857.23—2012包装运输包装件基本试验第23部分:随机振动试验方法
GB/T 4879防锈包装
GB/T 5048防潮包装
GB/T 5226.1机械电气安全 机械电气设备 第1部分:通用技术条件
GB/T 7403.1牵引用铅酸蓄电池 第1部分:技术条件
GB/T 7932气动对系统及其元件的一般规则和安全要求
GB/T 9969工业产品使用说明书总则
GB 11291.1工业环境用机器人 安全要求 第1部分:机器人
GB 11291.2机器人与机器人装备 工业机器人的安全要求 第2部分:机器人系统与集成
GB/T 12642—2013工业机器人性能规范及其试验方法
GB/T 12643—2013机器人与机器人装备词汇
GB/T 13306 标牌 S
GB/T 17799.2—2003电磁兼容通用标准工业环境中的抗扰度试验
GB 17799.4—2012电磁兼容通用标准工业环境中的发射
GB/T 28867含碱性或其他非酸性电解质的蓄电池和蓄电池组方形密封镉镍单体蓄电池
GB/T 36276电力储能用锂离子电池
ISO 186461:2016机器人 服务机器人性能规范及其试验方法 第1部分:轮式机器人运动 (RObotiCS—Performance Cnteria and related test methods for SerViCe robots— Part 1 : LoCOmot i On for WheeIed robots)
3术语和定义
GB/T 12643—2013界定的以及下列术语和定义适用于本文件。
3.1
操作机 manipulator
用来抓取和(或)移动物体、由一些相互铰接或相对滑动的构件组成的多自由度机器。
注1:操作机可由操作员、可编程控制器、或某些逻辑系统(如凸轮装置,线路)来控制。
注2:操作机不包括末端执行器。
[GB/T 12643—2013,定义 2.1]
3 . 2
移动平台 mobile PIatfOrm
能使移动机器人实现运动的全部部件的组装件。
注1:移动平台包含一个用于支撑负载的底盘。
注 2:改写 GB/T 12643—2013,定义 3.18。
3 . 3
控制系统 COntrol SyStem
一套具有逻辑控制和动力功能的系统,能控制和监测机器人机械结构并与环境(设备和使用者)进 行通信。
[GB/T 12643—2013,定义 2.7]
3.4
移动操作臂复合机器人 Hiobilemanipulator hybrid robots
由操作机(3.1)、移动平台(3.2)和控制系统(3.3)组成的工业机器人。
注:操作机通常安装在移动平台上。
4组成和分类
4.1组成
主要包括操作机、移动平台和控制系统,见图1。
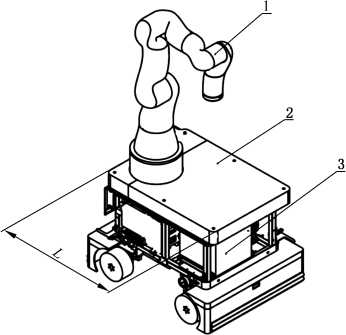
说明:
1——操作机;
2 移动平台;
3 --控制系统;
L— 移动平台沿运动方向的长度。
图1机器人组成示意图
4.2分类
4.2.1按负载重量分类
分类如下:
a) 轻型机器人,操作机负载小于20 kg;
b) 重型机器人,操作机负载大于或等于20 kg且小于或等于100 kg;
C)超重型机器人,操作机负载大于100 kg。
4.2.2按移动方式分类
分类如下:
a) 轮式机器人,移动平台通过轮子实现移动;
b) 履带式机器人,移动平台通过履带实现移动;
C)其他移动方式机器人,移动平台通过除轮子和履带之外的方式实现移动。
4.2.3按导航方式分类
分类如下:
a) 激光导航机器人;
b) 视觉导航机器人;
C)惯性导航机器人;
d) 磁导航机器人;
e) 卫星导航机器人;
f) 其他导航机器人。
5性能
机器人的性能指标参数应在产品标准中规定,包括但不限于以下各项:
a) 操作机技术参数如下(移动平台静态):
1) 最大单轴速度;
2) 位姿准确度和重复性;
3) 位置稳定时间;
4) 轨迹准确度和重复性;
5) 轨迹速度;
6) 静态柔顺性。
b) 移动平台技术参数如下(操作机静态):
1 ) 最大速度;
2) 平台重复定位精度;
C)机器人整体技术参数如下(整体动态):
1) 最大工作循环;
2) 系统重复定位精度;
6技术要求
6.1外观和结构
机器人外观和结构的要求如下:
a) 机器人表面应光洁,不能有明显的凹痕、裂纹和变形,不应存在划痕、裂纹、缩孔等缺陷。漆膜 及镀层应均匀,无气泡、划伤、脱落和磨损等缺陷;
b) 金属部件不应有腐蚀及其他机械损伤;
C)机器人设备中的所有紧固件部分应无松动、活动部分的润滑状态良好;
d) 文字、符号和标志应清晰、端正;
e) 机器人外形尺寸应满足设计要求;结构应布局合理,操作方便,便于维护;
f) 机器人部件质量应可靠,并符合相关标准。
6.2功能
机器人应包括但不限于以下功能:
a) 手动运动控制;
b) 自动运动控制;
C)点到点运动控制;
d) 作业编辑和地图编辑;
e) 安全保护功能,例如碰撞保护、自主避障、空间预警、异常报警等功能;
f) 手动充电和/或自主充电。
6.3气动系统
机器人气动系统应符合GB/T 7932的规定。
6.4 电气系统
机器人电气系统应符合GB/T 5226.1的规定。
6.5调度系统
机器人调度系统应包括但不限于以下功能:
a) 机器人分配;
C)运行控制;
d) 机器人的退出与恢复;
6.6安全要求
6.6.1基本要求
机器人的安全应符合GB 11291.1和GB 11291.2的规定。针对机器人应用特点,要求如下:
a) 机器人在应用过程中不应损坏应用产品;
b) 机器人在产品预期使用用途时物料(工件、器件、半成品等)不应发生掉落、滑动;
C)机器人运行过程中,不应对人或周围环境造成伤害;前方有障碍物时,机器人应停止或绕开障 碍物;
d)应在产品说明书中规定制动距离、最小安全距离及其测试条件。
6.6.2机械强度
机器人外壳应具有足够的机械强度。
6.6.3防护罩和外壳
机器人中构成危险因素的电气、气压等部件应具有固定的防护罩和外壳,且在正常运行期间不应打 开;当需要打开防护罩和外壳时,应采用工具才能卸下或打开。
6.6.4机械稳定性
操作机在最大负载及最大工作范围条件下,机器人整体不应失衡。
6.6.5电池安全
电池应符合 GB/T 7403.1^GB∕T 28867^GB∕T 36276 的规定。
电池管理系统应具备充电过压控制、放电电压控制、充电电流控制、放电电流控制、充放电温度控制 等功能。
6.7电磁兼容性
6.7.1电磁发射
机器人本体及配套充电设备应符合GB 17799.4—2012中表1和表2的要求。
6.7.2电磁抗扰度
机器人本体及配套充电设备应符合GB/T 17799.2—2003中第8章的要求。
6.8环境适应性
6.8.1气候环境适应性
机器人在表1规定的工作、贮存条件下应能正常工作。
表1工作、贮存条件
|
环境条件 |
工作条件 |
贮存条件 |
|
环境温度 |
0 'C 〜40 'C |
—40 'C 〜55 'C |
|
相对湿度 |
≤95% (40 笆) |
≤93% (40 'C) |
|
大气压力 |
86 kPa〜106 kPa | |
6. 8. 2 机械环境适应性
机器人带包装模拟运输试验后,结构及零件应无损伤,无弯曲变形,紧固件应无松动,并能正常 运行。
7试验方法
7.1外观和结构检查
目测检查机器人外观和结构,使用卷尺或其他工具检测外形尺寸。
7.2功能检查
按产品说明书中规定的操作方法检查6.2中各项功能。
7.3气动系统试验
按GB/T 7932中规定进行检查。
7.4电气系统试验
按GB/T 5226.1中规定进行检查。
7.5调度系统检查
按产品说明书中规定的操作方法检查6.5中各项调度系统功能。
7.6性能试验
7.6.1最大单轴速度
在额定负载条件下,使操作机的关节进行稳定工作,其他关节固定。令被测关节以最大速度做最大 范围的运动,测出速度的最大值。重复测量10次,取平均值作为测量结果。
7.6.2位姿准确度和重复性
按GB/T 12642—2013中7.2的规定进行。
7.6.3位置稳定时间
按GB/T 12642—2013中7.4的规定进行。
7.6.4轨迹准确度和重复性
按 GB/T 12642—2013 中 8.2、8.3 的规定进行 O
7 . 6 . 5 轨迹速度
按GB/T 12642—2013中8.6.4的规定进行。
7.6.6静态柔顺性
按GB/T 12642—2013中第10章的规定进行。
7 . 6 . 7 最大速度
按ISO 186461:2016中5.1〜5.4规定的设备及方法进行试验。
7.6.8平台重复定位精度 譎
如图2所示,试验步骤如下:
a) 使机器人到达位置A,并在地图中建立目标;
b) 移动机器人使其到达位置B,位置A和位置B间的距离应不小于5犔,且之间无障碍物;
C)对机器人下达指令,让其回到位置A,用测量设备记录机器人当前的位置;
d)重复步骤b)、C)至少30次,并按式(1)计算试验结果。
RPI =7 + 3SI
IJ = J伝一狓罕+(狔一^;)2
SI

狓
狀
狀
狔="•
RPl 目标定位,单位为毫米(mm);
犾J ——第J个位置和测量点的距离,单位为毫米(mm);
狓 坐标X的平均值,单位为毫米(mm);
狔 坐标狔的平均值,单位为毫米(mm);
狓 ——第J次测量的坐标狓值,单位为毫米(mm);
狔J 第J次测量的坐标狔值,单位为毫米(mm);
Si 标准偏差;
狀 测试次数,狀≥30°
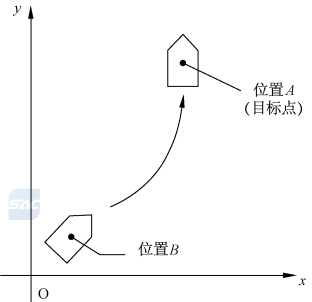
图2平台重复定位精度测试
7.6.9制动距离
按ISo 18646-1:2016中6.1〜6.4规定的设备及方法进行试验O 注:负载在空载到最大负载范围内选取。
7.6.10最大工作循环
如图3所示,试验步骤如下:
a) 机器人充满电后,使机器人按ABCD-DCBA四点间循环运行;其中AB点间距为5 L9CD间 距为操作机GB/T 12642—2013的6.8.2中立方体对角线长度;AB点间仅移动平台运行,到 B点移动平台停止后,操作机从C点运行到D点再返回C点后停止,移动平台返回A点后为 一个循环;
b) 机器人在额定负载和最大速度条件下,按图3的运动路径,在单位时间内,记录完成的循环次 数作为试验结果(取整数值)。

说明: .
▲
移动平台运行点(A点和B点);
--操作机运行点(C点和D点)O
图3最大工作循环试验路径
7.6.11系统重复定位精度
试验步骤如下:
a) 机器人充满电后,使机器人按图3试验路径循环运行,在D点预留停止时间,记录初始位置;
b) 机器人在额定负载和最大速度条件下,每次运动到D点时记录位置数据;
C)重复记录至少30次,并按式(1)计算试验结果o
7.6.12续航能力
试验步骤如下:
a) 机器人充满电后,按说明书开启机器人,使机器人全部软件处于运行状态,运动部件按说明书 要求工作;
b) 机器人在边长不小于5 L的正方形内额定负载条件下以额定速度连续运行,直到自动停止或 不能重新启动,以记录的开始时间和结束时间计算出整个操作时间;
C)测试过程可以是手动模式、自动模式或其他设定方式,使机器人从起点循环运行;
d)以上步骤重复3次,计算平均工作时间。
7.7安全试验
7.7.1基本要求检查
按GB 11291.1和GB 11291.2的规定进行检查。
7.7.2机械强度试验
按GB/T 2423.55—2006中第3章规定的方法对外壳进行试验,试验装置使用弹簧锤,测试点不少 于10个点。
注:嵌入外壳内的按钮、灯罩等部件不需测试。
7.7.3防护罩和外壳检查
目测检查。
7.7.4机械稳定性试验
操作臂额定负载、额定速度条件下,在移动平台移动方向上和移动平台移动垂直方向上分别做最大 臂展运动时目测检查。
7.7.5 电池安全试验
按电池厂商规定的试验方法进行试验。
7.8电磁兼容性试验
7.8.1电磁发射试验
按GB 17799.4—2012中表1和表2规定的基本标准方法进行试验。
7.8.2电磁抗扰度试验
机器人本体及配套充电设备应按GB/T 17799.2—2003中第8章规定的基础标准方法进行试验。
7.9环境适应性试验
7.9.1气候环境适应性
按GB/T 2423.1'GB/T 2423.2、GB/T 2423.3中规定的试验方法,按表1温湿度指标进行试验。其 中工作条件试验时间为4 h,贮存条件试验时间为8 h。
7.9.2 机械环境适应性
按GB/T 4857.23—2012附录A中公路运输推荐严酷水平∏级进行随机振动试验,试验时间为
8检验规则
8.1检验分类
检验分为型式检验和出厂检验。
型式检验应包括但不限于本标准规定的所有试验项目。出厂检验为机器人产品交货时应进行的各 项试验。
8.2型式检验
当有下列情况之一时,应进行型式检验:
a) 新产品试制定型投产时;
b) 因工艺,材料或结构的变化而影响产品质量时;
C)出厂检验结果与上次型式检验有较大差异时;
d) 停产超过三年恢复生产时;
e) 国家质量监管机构提出型式试验要求时。
8.3出厂检验
每台机器人都应进行出厂检验,并由制造单位的质量检验部门负责实施。
8.4检验项目
检验项目见表2。
表2检验项目
|
序号 |
检验项目 |
技术要求 |
检验方法 |
出厂检验 |
型式检验 | |
|
1 |
外观和结构 |
6.1 |
7.1 |
O |
O | |
|
2 |
功能 |
6.2 |
7.2 |
O |
O | |
|
3 |
气动系统 |
6.3 |
7.3 |
O |
O | |
|
4 |
电气系统 |
6.4 |
7.4 |
O |
O | |
|
5 |
调度系统 |
6.5 |
7.5 |
O |
O | |
|
6 |
性能 |
最大单轴速度 |
5 a) |
7.6.1 |
— |
O |
|
7 |
位姿准确度和重复性 |
5 a) |
7.6.2 |
— |
O | |
|
8 |
位置稳定时间 |
5 a) |
7.6.3 |
— |
O | |
|
9 |
轨迹准确度和重复性 |
5 a) |
7.6.4 |
— |
O | |
|
10 |
轨迹速度 |
5 a) |
7.6.5 |
— |
O | |
|
11 |
静态柔顺性 |
5 a) |
7.6.6 |
— |
O | |
|
12 |
最大速度 |
5 b) |
7.6.7 |
— |
O | |
|
13 |
平台重复定位精度 |
5 b) |
7.6.8 |
— |
O | |
|
14 |
制动距离 |
5 b) |
7.6.9 |
O |
O | |
|
15 |
最大工作循环 |
5 C) |
7.6.10 |
O |
O | |
|
16 |
系统重复定位精度 |
5 C) |
7.6.11 |
O |
O | |
|
17 |
续航能力 |
5 C) |
7.6.12 |
O |
O | |
|
18 |
安全 |
基本要求 |
6.6.1 |
7.7.1 |
O |
O |
|
19 |
机械强度 |
6.6.2 |
7.7.2 |
— |
O | |
|
20 |
防护罩和外壳 |
6.6.3 |
7. 7.3 |
— |
O | |
|
21 |
机械稳定性 |
6.6.4 |
7. 7.4 |
— |
O | |
|
22 |
电池安全 |
6.6.5 |
7. 7.5 |
— |
O | |
|
23 |
电磁 兼容性 |
电磁发射 |
6.7.1 |
7.8.1 |
— |
O |
|
24 |
电磁抗扰度 |
6.7.2 |
7.8.2 |
— |
O | |
|
25 |
环境 适应性 |
气候环境适应性 |
6.8.1 |
7.9.1 |
— |
O |
|
26 |
机械环境适应性 |
6.8.2 |
7.9.2 |
— |
O | |
|
注:“。”为检查项目;“一”为不检查项目。 | ||||||
9标志、使用说明书、包装、运输和贮存
9.1标志
9.1.1机器人产品上应装有铭牌,铭牌应符合GB/T 13306的规定。
9.1.2铭牌上应包括下述内容:
C)额定负载;
e) 制造单位名称;
S)电池信息;
h)充电信息。
动力源参数、耗电功率、外形尺寸以及重量等信息应在使用说明书内标注。
9.1.3 包装上应标注下列内容:
a) 产品的名称和型号;
b) 生产单位名称和地址;
C)制造年月和产品编号;
d) 额定负载能力;
f) 包装储运图示标志,应符合GB/T 191规定。
9. 2 使用说明书
使用说明书应按GB/T 9969的规定编写。
9. 3 包装
9.3.1包装箱内应附有装箱单、检验合格证、使用说明书(包括外观图、功能、规格、操作方法、注意事项 和环保要求等)、专用工具及相关随机文件。
9.3.2机器人包装分为内包装和外包装。包装材料应符合GB/T 4768λGB∕T 4879λGB∕T 5048的 规定。
9.3.3若有其他特殊包装要求,应在产品标准中规定。
9.4运输
运输和装卸时应保持包装箱的竖立位置,不得堆放。
9.5贮存
长期存放机器人的仓库,其环境温度为一40 °C〜55 °C ,40 °C时存储的相对湿度不大于93%,其周 围环境应无腐蚀、易燃气体和无强烈机械振动、冲击及强磁场作用。贮存期限及其维护要求由产品标准 规定。
11