I( S 33.200
M 50
JL
也,Mg艾公W1
备案号:
JT/T 1254—2019
TeChniCaI requirements Of PoSitiOn SyStem With high PreCiSiOn based on satellite navigation SyStem applied in Port
2019-03-15 发布
2019-07-01 实施
中华人民共和国交通运输部发布
附录A(规范性附录)港口高精度卫星导航定位系统定位信息输出报文格式
附录B(规范性附录)港曰高精度U星导航定位系统定位信息精度检捡方法
本标准按照CFVT 1.1—2009给出的规则起草,
本标准由交通运输信息通信及导航标准化技术委员会提出并归11。
本标准起草单位:交通运输部水运科学研究院。
本标准主要起草人澤广宇、耿雄飞、张安民、晁毅博、顾群、朱玮玮、窦路。
ɪn
本标准规定了港口髙精度卫星导航定位系统的系统组成、•般要求、功能要求、性能要求以及系统 数据交换。
本标准适用于港口生产作业系统中高精度I!星导航定位系统的设计、建设和使用。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注Fl期的引用文件,仅注日期的版本适用于本文 件。凡是不注曰期的引用文件,K最新版本(包括所有的修改单)适用于本文件。
GB/T 4208 外売防护等级(IP代码)
GB/T 6107 使用串行二进制数据交换的数据终端设备和数据电路终接设备之间
GB/T 11014
CB 50174
GB 50311
GB 50343
的接口
平衡电压数字接口电路的电气特性
数据中心设计规范
综合布线系统工程设计规范
建筑物电子信息系统防雷技术规范
ANSI∕T1A∕EIA 485-A-1998 平衡数字多点系统使用的发送器和接收器电气特性(EleCtrieaI Char-
acteristics Of GeneratOrS and ReCeiVeleS for USe in BalaIICeCI Digital Multipoint SyStemS)
NMEA 0183
船用电子设备接口标准(NMEA Ol83-SmndardfOr Interfacing Marine E-
Ieclronic DeViCeS)
RTCM 10402.3
差分全球导航IJ星系统服务推荐标准(2∙ 3版)[ReCOnImended Stand-ards for Differential (rl∖SS( GIObal NaVigatiOn SatelIite SySleInS) Service, VerSi()112 ∙ 3 J
RTCM 10403.3
差分全球导航卫星系统服务(3. 3 ) [ DifferentiaI GNSS ( GIObaI Navigation SateiIite SySternS) SenieeS-VerSiOn 3]
3术语和定义、缩略语
3.1术语和定义
卜列术语和定义适用丁•本文件。
全球导航卫星系统接收机GNSS receiver
能够接收全球导航卫星系统卫星信号进行导航定位的接收机。
注:改写 GB/T 19391—2003,定义 2.58o
3.1.2
载波相位观测值 Carrier PhaSe ObSerVatiOn
由全球导航卫星系统接收机锁定载波信号后测得的GNSS信号载波的累积相位,通常应用于高精 度定位。
[BD IlOOOI—2015,定义 2.3.30]
3.1.3
差分数据 differential data
又称差分改正数据。各类用于修正用户接收机观测值的伪距观测値、载波相位观测值、多普勒观测 值、卫星信息、坐标转换信息、轨道信息等数据统称为差分数据。
[BD 410003—2015,定义 3. 1.6]
3.1.4
全球导航卫星系统测量型接收机geodetic GNSS receiver
乂称GNSS测地型接收机。能够提供伪距、载波相位等原始观测数据,用于髙精度定位的GNSS终 端设备。
[BD 4I00I3—20I5,定义 3. I. I ]
3.1.5
基准站 reference StatiOn
在控制点上架设GNSS测帝型接收机、通信终端等设备,并在一定时冋内连续观测、记录卫星信号, 将数据传输给数据处理中心或经处理后直接播发差分改正数据的设施,又称参考站。
[BI) IlOoOI—2015,定义4.8.4.13]
3.1.6
移动站 rover StatiOn
安装于港口各类移动设备上的全球导航卫星系统接收机及其附属设备。
3.1.7
网络实时动态测量 network RTK
指在一定区域内建B多个基准站,对该地区构成网状覆盖,并进行连续跟踪观测,通过这些站点组 成丄星定位观测值的网络解算,获取覆盖该地区和某时间段的RTK改止参数,用丁•该区域内RTK用户 进行实时RTK改正的定位方式。
[CH/T 2(X)9—2010,定义 3.6]
3.1.8
高精度 high PreCiSiOn
服务于港口特定需求并通过载波相位差分技术获取的厘米级定位精度。
3.1.9
标称精度 nominal PreCiSion
全球导航卫星系统接收机出J .时标明的精度指标。
3.1.10
水平定位精度 horizontal positioning PreCiSiOn
定位信息在水平方向上投影分量的精度。
注:水平定位精度通常以测量值的水平方向投影分量中误差衡信。
3.1.11
垂直定位精度 VertiCal POSitiOning PreCiSiOn
定位信息在垂直方向上投影分量的精度。
注:垂直定位精度通常以测量值的垂直方向投影分量中误差衡量;
3.1.12
港口高精度卫星导航定位系统 PoSition SyStem WitlI IliglI PreCiSiOn based on SateIIite navigation SySteIlI applied in Port
应用U星导航技术在港11范用内扶取高桁度定位信息的应用系统.
3.2缩略语
下列縮略语适用于本文件。
AScIl 美国信息交换标准代码(Λm<,ricaιι Stan(Iar(I Co(Ie for InfOnnaIiOn lιιh*∣(*haιιg(*)
Br)S----北斗 I!星导航系统(BeiDolI NaVigation SatrIIite SyStenI)
CGCS2000----2000 国家大地坐标系(China GeOdetiC COOr(Iinate SyStem 2000)
CORS----连续运行基准站(ContinUOUSIy Operating ReferenCe StatiOnS)
GNSS---全球导航卫星系统(ClObal NaVigatiOn SateIlite SySteln)
GPS----全球定位系统(GlObaI POSitiOnirIg SyStem)
PDOP——位置精度因子(PoSitiOn DilUtion Of PreCiSiOn)
RMS---均方根差(ROot Mean SqUare Error)
KTK——实时动态测 «!:( Real-Time KinelnatiC)
TCP/IP——传输控制协议/因特网互联协议(TnHISlniSSion Collhol ProloCOI/InIemet PrOIoCOI)
UTC----协调ILr界时(Coordinated UniVerSal Time)
4系统组成
4.1系统结构
高桁度卩星导航定位系统由信息管理子系统、基准站子系统、移动终端子系统和通信子系统組 成,应具备向港曰生产作业系统输出符合附录A中的格式要求信息报文的功能。系统结构如图1 所示。
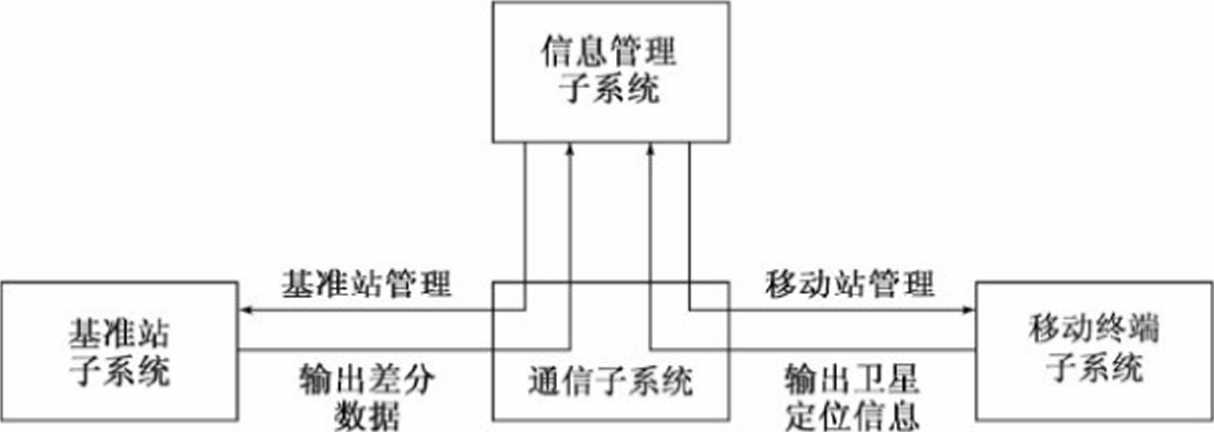
图1港口高精度卫星导航定位系统结构示意图
4.2信息管理子系统
信息管理了系统由服务器及其存储、供电单元组成,应具备管理基准站子系统和移动终端了•系统的 信息和状态的功能。
4.3基准站子系统
基准站子系统由基准站GNSS接收机及其附属设备组成,应貝备向信息管理子系统提供差分数据 的功能。
4.4移动终端子系统
移动终端子系统山安装于港门定位目标上的移动站和数据终端设备组成,应具备获取并转发卫星 定位信息的功能“
4.5通信子系统
通信子系统由高精度卫星导航定位系统数据通信听需的有线网络、无线网络设备组成,应满足高精 度卫星导航定位系统对数据交换的要求。
5 一般要求
港口髙精度卫星导航定位系统•般要求如下;
a) 坐标系应使用CCCS2000;
b) 定位相关数据宜使用ITC进行时间存储,使用非UTC进行存储时,应记录所使用的时冋基准;
C)应支持BDS高精度定位方式;
(I)系统物理环境与防雷建设应满足GB 50343中对电子信息系统的防宙及防浪涌的相关要求;
e) 信息管理子系统主体硬件应安装于符合GB 50174规定的机房;
f) 室外设备防护等级应满足GB/T 4208中规定的IP65等级的要求;
g) 应具备高可兌性,能长期稳定、可兌地运行。
6功能要求
6.1信息管理子系统
信息管理子系统应具备如下功能:
a) 高精度定位信息的汇聚和处理;
b) 接收和转发差分数据;
C)管理和远程监控基准站,如基准站发生故障,应具备报警能力;
(I)向港口生产作业系统发送符合附录A格式要求的定位信息。
6.2基准站子系统
基准站子系统应具备如下功能:
a)采用单基准站定位时,至少输出符合RTCM 10402.3格式的差分数据;
1»)采用CoRS系统定位时,至少输出符合RTCM 10402. 3、RTCM 10403.3格式的差分数据和原始 观测信息。
6.3移动终端子系统
移动终端了系统应具备如下功能:
a)实时解算并输出高精度定位信息的功能;
1>)数据输出格式应符合'MEA ()183屮对GNSS接收机的数据格式要求;
C)在RTK定位为非固定解时,具有报警功能。
6.4通信子系统
通信子系统应具备如卜•功能:
a) 满足笫8章系统数据交换的要求;
b) 满足系统运行所需的差分数据、定位信息的通信需求。
7性能要求
7.1总体性能要求
港口高精度卫星导航定位系统总体性能耍求如下:
a)应能实时获取各移动站的定位信息,移动站在挣止状态卜•的定位信息的水平定位梢度不应低 于25mm、垂直定位精度不应低于50mm;
∣>)车辆定位信息的数据更新频率不应低于20Hz,移动机械定位信息的数据更新频率不应低于 IOHz,船舶定位信息的数据更新频率不应低于IHz;
C)定位信•息精度应至少每年检测一次,检测方法应按附录B进行;
d) 应具备并发处理不少于IOO台移动站数据的能力;
e) 故障报警响应时间不应高于Is;
f) 基准站子系统和移动终端子系统应具备在K期无人值守情况下穏定工作的能力。
7.2基准站接收机
基准站CNSS接收机性能指标不应低于表1所列要求。
表1基准站GNSS接收机主要性能要求
|
项 目 |
性能要求 |
|
水平标称精度(静态)(mnι) |
5 + JxlO-6 |
|
垂直标称精度(静态)(mm) |
ιo + <∕×ιo∙6 |
|
工作温度(T) |
-20-45 |
|
工作湿度(%) |
W95 |
|
注1 :标称精度采用均方根Z> (RMS)作为表述方式。 注Iid为移动站至基准站距离,单位为皇米(mm > o |
7.3移动站接收机
移动站CNSS接收机性能指标不应低于表2所列要求.
表2移动站GNSS接收机主要性能要求
|
项 目 |
性能要求 _ |
|
水平标称精度(KTKH mm)_________ |
20+J× IO*6 |
|
垂直标称精度(IrrK) (mm) |
40+<∕× I0^6 |
|
T∙作温度(T) |
- 20~45 |
|
丄作湿度(%) |
W95 |
|
注1;标称精度釆用均方根差(RMS)作为衣述方式“ 注2:d为移动站至基准站距离,单位为臺米(ιnιn)o |
7.4网络通信
网络通信性能要求如下:
a) 信息管理于系统的网络带宽不应低于IOOMI>it∕s;
b) 基准站子系统的网络带宽不应低于2Mbit/s;
C)网络通信中的有线网络通信误码率应小于io-8;
CI)信息管理子系统与基准站子系统间的数据通信延时应小于50OmSo
8系统数据交换
8.1差分数据
8.1.1 一般要求
在基准站子系统与信息管理子系统之间应使用有线冋络进行差分数据的传输,
8.1.2电气接口
GNSS接收机的差分数据传输应具有RS-232、10422、10485或RJ45 |河口)接口的电气特性耍求 如下:
a) RS-232接口的电气特性应符合GB/T 6107的规定;
b) RS-422接口的电气特性应符合GB/T 11014的规定;
C) RS-485接口的电气特性应符合ANSl/TIA/EIA 485-A-1998的规定;
Cl) KJ45接口的电气特性应符合GB 50311的规定。
8.1.3数据格式
差分数据格式应符合6.2的规定。
8.2定位信息
8.2.1信息内容
高精度卫星导航系统向外输出的定位信息内容应包括经纬度、大地水准面差以及时冋,还口J包括目 标的速度、运动方向以及定位精度。
8.2.2通信协议
定位信息输出应使用TcP/IP数据通信协议,信息输出报文格式见附录Ao
附录A
(规范性附录)
港口高精度卫星导航定位系统定位信息输出报文格式
A.1 一般要求
港口高精度IJ.星导航定位系统的定位信息输出报文格式应符合如下要求:
a)定位信息输出采用TCP/IP数据通信协议;
1>)定位信息报文内容采用ASCn编码。
A.2字符要求
A.2.1总体要求
定位信息内的字符包括保留字符和有效字符,其中保留字符不应出现在数据字段中,有效字符组成 定位信息的数据字段。
A.2.2保留字符
保留字符用于定位信息输出报文的起始、结束标识,数据字段间定界,数据字段与校验定界D保留 字符内容、编码信息应满足表A.1的要求。
表A. 1保留字符表
|
保留字符 |
10进制 |
16进制 |
_____________备 注_____________ |
|
$ |
36 |
24 |
信息报文开始标识符 |
|
9 |
44 |
2(: |
________数据字段间定界符________ |
|
♦ |
42 |
2A |
_______数据字段与校验定界符_______ |
|
〈CR〉 |
13 |
OD |
与保酔字符〈LF〉组成报文的结束标识符 |
|
〈LF〉 |
IO |
OA |
与保留字符〈CR〉组成报文的结束标识符 |
A.2.3有效字符
冇效字符应由英文大小写、数字和字符组成。
A.3信息报文
A.3.1报文结构
港Ll高精度卫星导航定位系统的定位信息报文应巾各类数据字段和保留字符构成,
报文通用结构如下:
a) 一报文开始;
b) [(数据字段〉“,”]—多个数据字段之间巾“,”保留字符分隔(最后一个数据字段无数据字 段定界符“,”);
C) “ * ”〈校验字段)——信息报文开始定界符“$”与校验定界符“ * ”之间全部字符的异或校验;
(1) <CR>< LE)——报文结束标识。
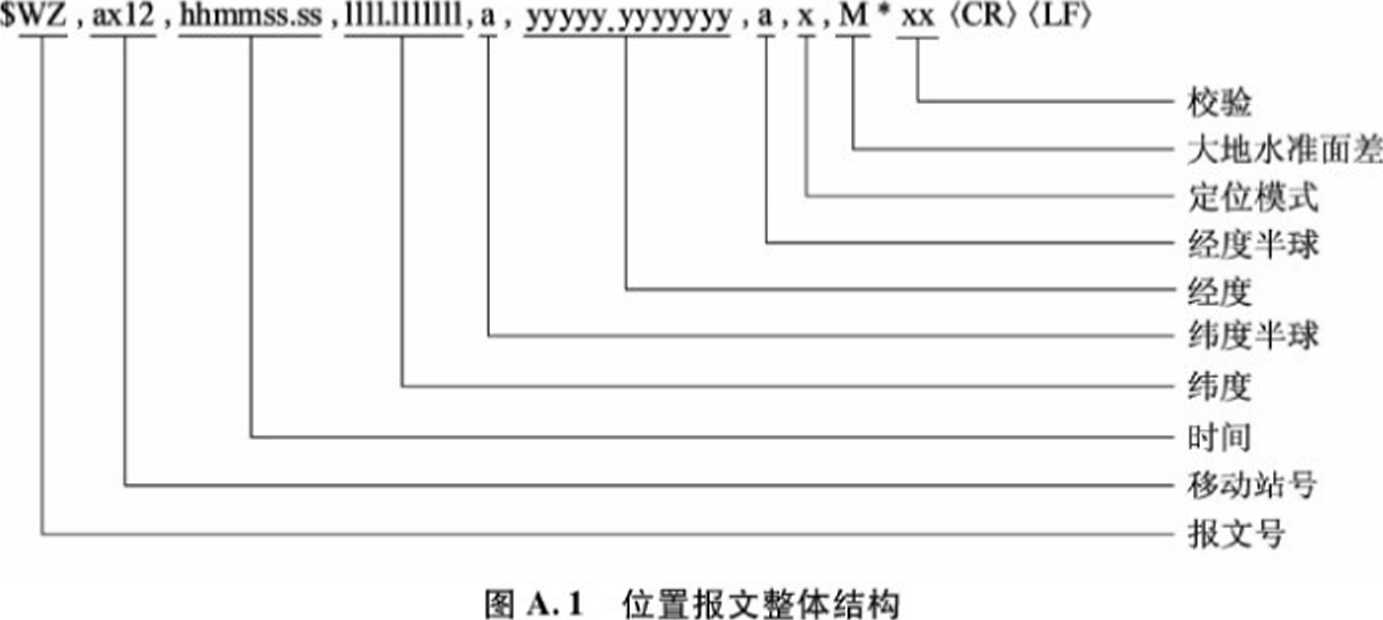
A.3.2位置报文
位置报文用F输出各移动站的位置信息,位咲报文整体结构如图A. I所示。位置报文的数据字 段格式应满足表A. 2的要求。
表A.2位置报文数据字段格式要求
|
数据字段 |
格 式 |
_______________数据字段内容说明_______________ |
|
报文号 |
WZ |
位置报文号为“WZ”___________________________________ |
|
移动站号 |
uxl2 |
12位字母•或数守亨符的移动站号__________________________ |
|
时间 |
IllHnInSS.8S |
内容为均用2位数字表示的小时、分钟、秒的粮数部分和秒的小数部分,秒的常数部 分和小数部分之间用“•”字符分俩 |
|
纬度 |
nil. IlIIIIl |
2位数字字符表示度、2位数字字符表示分J位字符分隔、7位的数字字符表示 分的小数部分 |
|
纬度半球 |
a |
可选值“N/S”.N为北纬、S为南纬 |
|
经度 |
yyyyy∙ yyyyyyy |
3位数字字符表示度、2位数字字符发分、I位字符分隔、7位的数字字符表示 分的小数部分 |
|
经度半球 |
a |
可选值**E∕W∖E为东经、W为西经 |
|
定位模式 |
X |
定位模式(可选值0/4/5): O-定位不可用成无效;
|
|
大地水准面差 |
M |
大地水准面差精确至小数点后3位 |
|
校验 |
XX |
从S开始到*之间的所冇ASCiT码的异或校验(2个字符) |
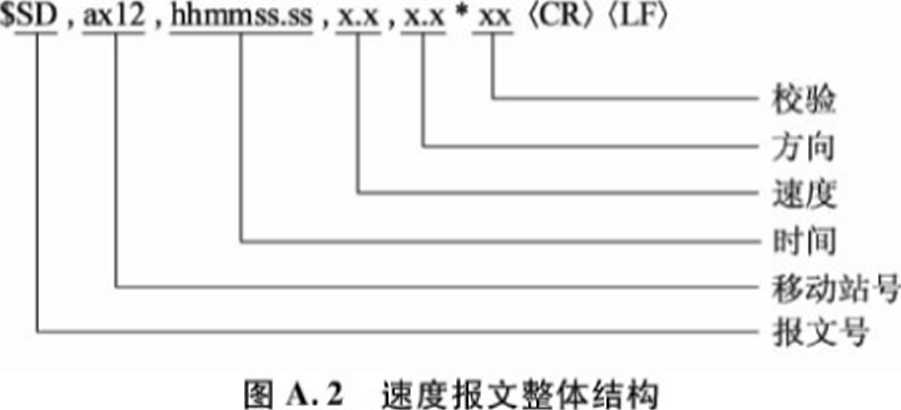
A.3.3速度报文
速度报文用于输出各移动站的速度及方向方息。速度报文整体结构如图A.2所示。速度报文的 数据字段格式应满足表A.3的要求。
表A∙3速度报文数据字段格式要求
|
数据字段 |
格 式 |
_______________数据字段内容说明_______________ |
|
报 _ |
SD |
位置报文号为“ SD”____________________________________ |
|
移动站号 |
ax!2 |
12位字母或数宇宇符的移动站弓 |
|
时间 |
hlιιnrnss.ss |
内容为均用2位数字表示的小时、分钟、秒的整数部分和秒、的小数部分,秒的整数部 分和小数部分之间用“•”字符分隔__________________________ |
|
速度 |
X.X |
速度值精确到小数点后2位,单位为米每秒(ni/、)____________________ |
|
方向 |
X.X |
运动的直•北方向.精确到小数点后2位,氓位为度___________________ |
|
校验 |
XX |
从S开始到*之间的所玉ASCll码的异或校验(2个字符)_______________ |
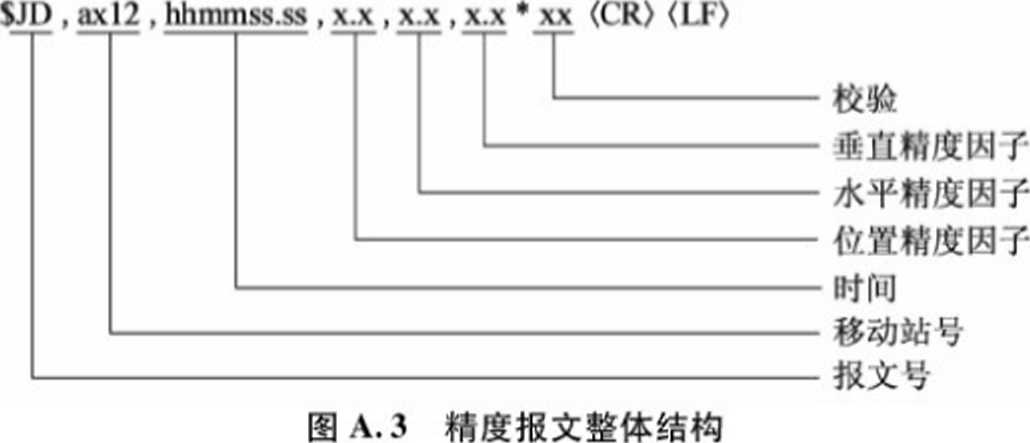
A.3.4精度报文
精度报文用于输出各移动站的定位粘度信息精度报文整体站构如图A. 3所示精度报度的数 据字段格式应满足表A. 4的要求。
表A∙4精度报文数据字段格式要求
|
数据字段 |
格 式 |
_______________数据■段内容说明_______________ |
|
报文号 |
JD |
位置报文号为“JD”____________________________________ |
|
移动站号 |
ax 12 |
12位字母或数亍字符的移动站号________________________ |
|
时间 |
hbιnmss.ss |
内容为均用2位数字表示的小时、分钟、秒的整数部分和秒的小数部分,秒的整数部 分和小数部分之间用“• ”字符分隔___________________________ |
|
位?T∙紡度因「 |
X.X |
位賞稍度因子数值稍确至小数点后1位,取代范围为0∙5~99.9___________ |
|
水平•精世因F |
X.X |
水平精度因*数值枷⅝至小数点后1位.取平精国为0∙5~99.9 |
|
垂M粘度因『 |
X.X |
垂/丑度仕I子数伯和确至小数点后1位.取值范IIjl为0.5~99.9_____________ |
|
校验 |
XX |
从S幵始到*之间的所有ASCll码的异或校验(2个字符)_______________ |
附录B (规范性附录)
港口高精度卫星导航定位系统定位信息精度检验方法
B.1测量准备
测量准备要求如下:
a) 实际测量前,应先制订测量计划。测量计划主要确定测量所用设备、测试点数量及位置、测用 时段长度及采样间隔。
b) 定位信息精度检验前,应针对不同类别的定位目标在港口范围内选取不少于3个测试点,目.测 试点应在港口范围内尽量分散。
C)每个测试点应进行不少于3次的定位信息采集,同一测试点的各次采集宜在不同H期的不同 时段进行。
d)单次测量时段长度不应小于30min,采样间隔宜在IS ~ IOS之冋。
B.2测量步骤
测量步骤要求如下:
a)测试点在测量时段应满足15。以上凹观测GNSS卫星数量大于6个且三维位置儿何精度因于 (PDoP)值小于4的要求。
1>)测常执行时应使用移动站CNSS接收机进行RTK定位,并于GNSS接收机稳定输出固定解的 定位信息后开始记荥定位信息。
C)各测试点获取的定位信息以测虽时段为最小单元,并单独保存。定位信息文件名宜包括测点 号和测量时段号。
B.3水平定位精度计算
水平定位精度以测试点为最小単元进行计算。
港口高精度卫星导航定位系统的水平位置信息精度检羚计算前,应使用3度带的高斯■克吕格正形 投影获取平面坐标。高斯•克吕格正形投影的中央子午线经度可选择使用港口中心区域的经度值。
各测试点水平定位精度(州Z)应按式(B. 1)计算:
临=√τπ∑∑w⅛ (B. 1)
N 八 K — I / = 1 m ≡ 1
式中:峋——测试点水平方向投影分吊:的中误差;
/V—测试点采集时段数;
K——采集时段的观测次数;
Dhim——第i时段E次采集的测试点平面点位平均值与每次观测平面点位的差值〔按式(B. 2)计 算]。
Dh = √P; + D; (B.2)
式中:/*——单次测试点平面点位平均值与每次观测平面点位的差值;
DX—测试点投影后的平而坐标的X轴分芾与ɪ轴分代平均值的差值;
。、——测试点投影后的平面坐标的ʃ轴分M⅛ J轴分量平均值的差值,
B. 4垂直定位精度计算
垂直定位精度以测试点为最小单元进行计算。
各测试点垂直定位精度(吃.)应按式(B∙ 3)计算:
MW =、\宀■立立賦“ (B∙3)
ʌ Aa 一 "二m二 1
式中也、——测试点垂直方向投影分量中误差;
N——测试点采集时段数;
K——采集时段的观测次数;
DVIm——第i时段四次采集的测试点高程平均值与每次观测高程的差值。
B.5定位信息精度符合性判定
港口髙精度卫星导航定位系统定位信息精度检验的各测试点的水平定位精度和垂宜定位精度应符 合7. Ia)的规定,任意测试点的水平或垂直定位精度不符合要求则港口高精度卫星导航定位系统整体 精度检验为不合格。
港口高稍度」J.星导航定位系统整体精度检验为不合格后,需要查找相应原因并加以解决。问题解 决后,应按照本附录重新进行全部内容的检验。
参考文献
,1(
,2(
,3(
,4(
,5(
,6(
,7(
,8(
,9(
,10(
,∣1(
GB/T
GB/T
GB/T
18314)
19391 )
28588
2∞9全球定位系统、GPS。测R规范
2(X)3全球定位系统、GPSO术语及定义 全球导航卫星系统连续运行基准站网技术规范
CH/T 2009) 2010全球定位系统实时动态测虽、RTt技术规范 CJJ/T 73) 2010卫星定位城市测量技术规范 BD BF) BD Bl)
IIOOOI) 41 ()(X)3) 4I0(X)4) 420005)
2015
2015
2015
2015
Bl) 420009) 2015
BD 440013) 2017
北斗卫星导航术语
北斗/全球卫星导航系统、GNSSO接收机差分数据格式、二。
北斗/全球卫星导航系统、GNSS。接收机导航定位数据输出格』: 北斗/全球卫星导航系统、GNSS。导航单兀性能要求及测试方法 北斗/全球卫星导航系统.GNSSo测量型接收机通用规范 北斗地基增强系统基准站建设技术规范
12