
ICS 47.020.70
U 60
GB/T 39277-2020
VeSSel traffic SerViCeS
2020-11-19 发布
2021-06-01 实施
1
本标准按照GB/T 1.1-2009给岀的规则起草。
请注意本文件的某些内容可能涉及专利。本文件的发布机构不承担识别这些专利的责任。
本标准由全国船舶电气及电子设备标准化技术委员会(SAC/TC 531)提岀并归口。
本标准起草单位:中华人民共和国江苏海事局、中国船舶重工集团有限公司第七二四研究所、中船 重工鹏力(南京)大气海洋信息系统有限公司、交通运输部规划研究院、交通运输部水运科学研究院、中 国交通通信信息中心、大连海事大学、中电莱斯信息系统有限公司。
本标准主要起草人:王士明、金家龙、夏亮、李啸、徐伟、马锦平、卞方顺、孙大金、赵显峰、张建龙、 杨明远、王子骏、陈张奕、夏金锋、徐斌、龚瑞卿、任广富、杨宗保、曹伟、谢向前、崔松、陈静、范钦、孙伟、 田池、江晓竹、柏晓锁、何狮、易中立、文捷、肖飞、许瑞雪、顾晶。
IU
1范围
本文件规定了船舶交通管理系统(VTS)的术语和定义、缩略语、分类和编码、技术要求、试验方法、 检验规则、标志、标签和随行文件、包装、运输和贮存等内容。
本文件适用于VTS的设计、开发、生产和验收。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T191包装储运图示标志
GB/T 2260中华人民共和国行政区划代码
GB/T 2423.1
电工电子产品环境试验 第2部分:试验方法 试验A:低温
电工电子产品环境试验 第2部分:试验方法 试验B:高温
环境试验 第2部分:试验方法 试验Cab:恒定湿热试验
电工电子产品环境试验 第2部分:试验方法 试验Ka:盐雾
环境试验 第2部分:试验方法 试验Sa:模拟地面上的太阳辐射及其试验导则
环境试验 第2部分:试验方法 风压
GB/T 2423.2
GB/T 2423.3
GB/T 2423.17
GB/T 2423.24
GB/T 2423.41
GB/T 4208
外壳防护等级(IP代码)
气象雷达参数测试方法
声学机器和设备噪声发射值的标示和验证
船舶海洋水文气象辅助测报规范
船载自动识别系统(AIS)技术要求
建筑物防雷装置检测技术规范
公共安全视频监控联网系统信息传输、交换、控制技术要求
GB/T 12649
GB/T 14574
GB/T 17838
GB/T 20068
GB/T 21431
GB/T 28181
GB/T 30287.2卫星定位船舶信息服务系统 第2部分:船用终端与服务中心信息交换协议
GB/T 30790.6色漆和清漆 防护涂料体系对钢结构的防腐蚀保护 第6部分:实验室性能测试 方法
VHF/UHF频段无线电监测接收机技术要求及测试方法
VHF/UHF无线电监测测向系统开场测试参数和测试方法 设备可靠性可靠性评估方法
GB/T32401
GB/T34089
GB/T37079
GB 50052供配电系统设计规范
GB 50174数据中心设计规范
YD/T 2022时间同步设备技术要求
ISO 129446 色漆和清漆 防护涂料体系对钢结构的防腐蚀保护 第6部分:实验室性能试验方 法(PamtS and Varni SheS—COrrOSi On PrOteCt i On Of Steel StrUCtUreS by PrOteCt i Ve Pa i nt SyStemS—Part 6 : LabOratOry PerfOrmanCe teSt methods)
IEC 60945海上导航和无线电通信设备及系统通用要求测试方法及要求的测试结果
1 (Maritime navigation and radiOCOmmUniCatiOn equi Pment and SyStemS—General requirements—Meth-OdS of testing and requred test results)
ITU-T Rec.P.863 语音质量的客观评测标准(PerCePtUaI ObjeCtVe IiStening quality PrediCtiOn)
IALA V-145 VTS 数据交换服务(IVEF)[Inte-VTS EXChange FOrmat (IVEF) SerVCe V-145]
3术语、定义和缩略语
3.1术语和定义
下列术语和定义适用于本文件。
3.1.1
船舶交通管理系统VeSSel traffic SerViCeS
为保障船舶交通安全,提高船舶交通效率,保护水域环境,对船舶实施交通管制并提供咨询服务的 系统。
3 . 1 . 2
VTS 主管机关 VTS authOrny
由政府设立的,全部或部分负责区域内安全(包括环境安全)、船舶交通效率及环境保护的机关。
3 . 1 . 3
VTS 区域 VT Sarea
由VTS主管机关划定并对外公布的,VTS能够实施有效监视和服务的区域。
3.1.4
VTS 中心 VTS Center
VTS的管理和运作中心。
3.1.5
雷达站 radar StatOn
VTS中以雷达为主要技术手段的信息采集站。
注:通常还可能配有VHF、水文气象、视频监控、网络传输等设备,以及配套的电源、环境动力监测、防雷和消防监 测等。
3.1.6
雷达扫描周期 radar SCanning PeriOd
雷达天线完成一次完整扫描所需的时间。
3 . 1 . 7
距离分辨力range reSolution
在同一方位上,雷达区分相邻点目标最小距离间隔的能力。
3.1.8
方位分辨力 azimuth reSolution
在同一距离上,雷达区分相邻点目标最小方位角的能力。
3.2缩略语
下列缩略语适用于本文件。
AIS:自动识别系统(AUtOmatiC IdentifiCatiOn SyStem)
BDS:北斗卫星导航系统(BeiDOU NaVigatiOn Satente SyStem)
CAT :数据分类(Data CategOry)
FSPEC:字段规格(FIeId SpeCifiCatOn)
2
FX:字段扩展指示符(FieId EXtenSiOn IndiCator)
IALA:国际航标与灯塔协会(InternatOnal ASSOCatOn of Marme AidS to NaVigatiOn and Light-house AUthOrkeSS)
LEN:长度指示符(Length IndCatOr)
LSB:最低有效位(LeaSt SignifiCant Bit)
MMSI:海上移动服务识别码(MantIme Mobile SerVlCe Identky)
MTBF:平均故障间隔时间(Mean Time BetWeen FaUUreS)
MTTF:平均失效前时间(Mean Time To FaHUre)
RCS:雷达散射截面(Radar CrOSS SeCtOn)
REP:字段重复指示符(FleId RePetltIOn IndlCatOr)
SAC:系统区域码(SyStem Area Code)
SIC:系统识别码(SyStem IdentifiCatiOn Code)
SSR:固态雷达(Solid State Radar)
TCP:传输控制协议(TranSmSSOn Control ProtoCol)
UAP:M户应用说明(USer APPIiCatiOn PrOfHe)
UDP:用户数据报协议(USer Datagram ProtoCol)
UTC:协调世界时(Coordinated UnVerSaI Time)
VHF:甚高频(Very HIgh FreqUenCy)
VHF-DF:甚高频测向仪(Very High FreqUenCy DneCt Fmder)
VTS:船舶交通管理系统(VeSSeI TraffC SerVCeS)
4分类和编码 4.1系统分类
根据VTS区域特点可将VTS分为三类,如表1所示O
表1 VTS分类
|
VTS分类 |
分类说明 |
|
内陆水域VTS |
用于提高河流、湖泊或其他与海洋或内陆相连的水域中航行的安全性和效率,保障生命财产安全, 保护水域环境、堤岸、附近的居民和企业免受船舶交通运输可能产生的不利影响。它能够识别和 监测船舶,对船舶的航行进行合理规划,通过空间分配来管理交通,以及提供导航信息和协助 |
|
沿海VTS |
协助船舶安全,迅速地通过沿海水域,以及在引航员上船或下船之前为船舶提供协助 |
|
港 口 VTS |
对船舶在港口区域内的航行进行特定的交通管理,最大程度地减少事故,防止不必要的延误,确保 港口的经济效益、生命安全和环境保护。 港口 VTS可能会发布船舶进出港口的规定或指示信息,包括: ——进入/离开VTS区域的许可; ——引航员或拖船的配备要求; --该区域的最大速度; ——船舶间距; ——锚地位置的分配; --在狭窄通道中的超越权限 |
|
注:实际情况下,某些VTS可能兼具上述几种类型的特点。 | |
4.2编码
4.2.1系统编码
系统的编码结构见图1:
××× ××× ××××
-----版本代号
---------系统名称
------------商标代号
注:编码结构中的系统名称宜统一为“VTS”,即××× VTS ×××。
图1系统编码结构
4.2.2系统设备编码
VTS的设备编码由中心编码(8位)、用户自定义编码(2位)、类型编码(3位)和序号(7位)四个码 段共20位十进制数字字符构成,即设备编码=中心编码+用户自定义编码+类型编码+序号。
VTS设备编码的详细规则见表2。其中,中心编码指设备所属的VTS中心的编码,按照VTS中心 所在地的行政区划代码确定,当不是基层单位时空余位为0。行政区划代码采用GB/T 2260规定的行 政区划代码表示。用户自定义编码是指由用户按照实际需求自定义的识别代码(例如,以设备所属的站 点为单位进行统一的设备编码,范例参见附录A)O类型编码规定了设备的具体类型。
表2 VTS设备编码规则
|
码段 |
码位 |
含义 |
取值说明 | |
|
中心编码 |
1、2 |
省级编号 |
由VTS中心所在地的行政区划代码确定,符合GB/T 2260 的要求 | |
|
3、4 |
市级编号 | |||
|
5、6 |
区级编号 | |||
|
7、8 |
基层接入单位编号 |
由VTS主管机关确定 | ||
|
用户自定义编码 |
9、10 |
用户自定义识别编码 |
由VTS用户按照需求自行设置 | |
|
类型编码 |
11、12、13 |
111〜129表示类型为 雷达子系统设备 |
111 |
雷达天线编码 |
|
112 |
雷达收发机编码 | |||
|
113 |
雷达维护终端编码 | |||
|
114〜129 |
扩展的雷达子系统设备编码 | |||
|
130〜149表示类型为 VHF通信子系统设备 |
130 |
VHF天线编码 | ||
|
131 |
VHF收发机编码 | |||
|
132 |
VHF控制服务器编码 | |||
|
133 |
VHF操作终端编码 | |||
|
134 |
主控语音网关编码 | |||
|
135 |
麦克风编码 | |||
|
136 |
扬声器编码 | |||
|
137〜149 |
扩展的通信子系统设备编码 | |||
表2 (续)
|
码段 |
码位 |
含义 |
取值说明 | |
|
类型编码 |
11、12、13 |
150〜169表示类型为 VHF-DF子系统设备 |
150 |
显示控制终端 |
|
151〜169 |
扩展的VHF-DF子系统设备编码 | |||
|
170〜199表示类型为 数据接入子系统设备 |
170 |
AIS接入设备编码 | ||
|
171 |
前端摄像机 | |||
|
172 |
北斗授时服务器编码 | |||
|
173 |
风速风向仪编码 | |||
|
174 |
气压传感器编码 | |||
|
175 |
温湿度记录仪编码 | |||
|
176 |
能见度传感器编码 | |||
|
177 |
雨量传感器编码 | |||
|
178 |
水深测试仪编码 | |||
|
179 |
水位传感器编码 | |||
|
180 |
流速仪编码 | |||
|
181〜199 |
扩展的数据接入子系统设备编码 | |||
|
200〜219表示类型为 数据综合处理子系统 设备 |
200 |
多传感器综合处理器编码 | ||
|
201 |
雷达数据处理器编码 | |||
|
202〜219 |
扩展的数据综合处理子系统设备编码 | |||
|
220〜299表示类型为 交通显示与控制子 系统设备 |
220 |
交通显示处理器编码 | ||
|
221 |
交通显示器编码 | |||
|
222 |
高清解码器编码 | |||
|
223 |
操作台编码 | |||
|
224〜299 |
扩展的交通显示与控制子系统设备编码 | |||
|
300〜329表示类型为 管理信息子系统设备 |
300 |
管理信息服务器编码 | ||
|
301〜329 |
扩展的管理信息子系统设备编码 | |||
|
330〜349表示类型为 记录重放子系统设备 |
330 |
记录重放处理器编码 | ||
|
331 |
磁盘阵列存储器编码 | |||
|
332〜349 |
扩展的记录重放子系统设备编码 | |||
|
350〜369表示类型 为信息传输与网络子 系统设备 |
350 |
中心路由器编码 | ||
|
351 |
网络交换机编码 | |||
|
352 |
信息管理终端编码 | |||
|
353 |
PCM复用器编码 | |||
|
354 |
数字微波信道机编码 | |||
|
355〜369 |
扩展的信息传输与网络子系统设备编码 | |||
表2 (续)
|
码段 |
码位 |
含义 |
取值说明 | |
|
类型编码 |
11、12、13 |
370〜399表示类型 为信息交换与共享子 系统设备 |
370 |
外网服务器编码 |
|
371 |
数据交换服务器编码 | |||
|
372 |
NAS网络存储器编码 | |||
|
373〜399 |
扩展的信息交换与共享子系统设备编码 | |||
|
400〜999为扩展类型 |
400〜999 |
扩展类型 | ||
|
序号 |
14 〜20 |
设备、用户序号 |
0000000〜 9999999 |
用户自定义的序号 |
5技术要求 5.1系统通用要求 5.1.1系统组成
VTS通常由以下基本系统要素组成:
a) 雷达子系统;
b) VHF通信子系统;
C) VHF-DF子系统;
d) 数据接入子系统;
e) 数据综合处理子系统;
f) 交通显示与控制子系统;
S)管理信息子系统;
h) 记录重放子系统;
i) 信息传输与网络子系统;
j) 信息交换与共享子系统。
VTS的各子系统按照其功能划分为信息感知层、信息传输层、信息处理层和信息应用层,VTS的 组成及其分类见图2。
注:VTS可以仅包含上述子系统中的一部分,也可以包含除上述各子系统之外的其他子系统。

雷达子系统
数据综合处理 子系统
VHF通信子系统
管理信息 子系统
交通显示与控制 子系统
VHF-DF子系统
信息传输与网络 子系统
记录重放 子系统
数据接入子系统
信息交换与共享 子系统
信息感知层
信息传输层
信息处理层
信息应用层
图2 VTS组成和子系统分类
5.1.2基本功能要求
VTS基本功能分为内部功能和外部功能,其中,内部功能应包括信息收集和信息评估;外部功能应 包括交通组织、信息服务、助航服务和参与联合行动。具体内容如下:
a) 内部功能如下:
1) 信息收集应包括以下内容:
•获取船舶交通动态信息;
•接收船舶动态报告和有关船舶、人员及危险货物装载的情况报告;
•收集航行计划信息;
•收集水文气象信息。
2) 信息评估应包括以下内容:
•处理、存储和查询船舶交通动态信息;
•统计处理、存储和查询船舶动态报告和有关船舶、人员及装载的情况报告以及航行计 划和水文气象信息;
•预测未来船舶航行动态和交通态势;
•融合信息。
b) 外部功能如下:
1) 交通组织应包括以下内容:
• 组织船舶编队航行,允许进入、通过或离开;
•指定遵循的航线或限制航速; S
•指定锚泊位置。
2) 信息服务可包括以下内容:
•播发有关船舶动态和水文气象情况的信息,以协助船舶安全航行;
•发布航行警告或向船舶提供有关船位、航向、碍航物等助航信息;
•向港口、航运和搜救等有关部门提供信息服务。
3) 当船方请求或VTS中心认为必要时,VTS应能向船舶提供协助航行信息。助航服务应 包括以下内容:
•助航需求与确认;
•航行信息服务;
•航行建议或警告。
4)参与联合行动应包括向船舶和有关机构提供信息,协助海上搜救、抢险及防止污染扩大等 工作。
不同类型的VTS所要求的基本功能有所不同,具体如表3所示。
表3 VTS功能要求
|
VTS类型 |
功能要求 |
|
内陆水域VTS |
信息收集、信息评估、交通组织、信息服务、助航服务和参与联合行动 |
|
沿海VTS |
信息收集、信息评估、信息服务和参与联合行动 |
|
港 口 VTS |
信息收集、信息评估、交通组织、助航服务和参与联合行动 |
5.1.3总体性能要求
5.1.3.1系统性能要求
系统性能要求如下:
a) 分辨力:
1) 分道通航水域的系统分辨力应满足:Wz<W1-2 ∙ Ez
2) 单向航道的系统分辨力应满足:叽<叽一叽一2 ∙ EmaIo 式中:
WO ——一单向航道宽度;
犠1 通航分隔带宽度;
犠2 ——在显示终端上的设计船型目标视频图像对航道垂直线的投影尺寸; 犠3 ——在显示终端上的航道两侧标志视频图像对航道垂直线的投影尺寸; EmaX--系统定位最大误差的绝对值。
b) 定位误差:
1) 分道通航水域的系统定位误差应满足:EmaX<O.5 ∙ (WI-W2);
2) 单向航道的系统定位误差应满足:EmaX<O∙5 ∙ (W0-W2-W3)o 式中:
Wo ——单向航道宽度;
Wi 通航分隔带宽度;
犠2 ——在显示终端上的设计船型目标视频图像对航道垂直线的投影尺寸; W3 ——在显示终端上的航道两侧标志视频图像对航道垂直线的投影尺寸; EmaX—— 系统定位最大误差的绝对值。
C)跟踪误差:
1) 航速误差≤1 kn;
2) 航向误差≤2.5°o
d) 最大可跟踪直线速度≥30 kn;
e) 最大可跟踪加速度≥0.38m∕s2;
f) 最大可跟踪角速度≥4°∕s°
5.1.3.2系统可用性
表4规定了 VTS不同能力等级对应的可用性指标要求。
8
表4可用性指标
|
可用性 |
能力等级 | ||
|
基本 |
标准 |
高级 | |
|
在任意给定的VTS区域内,基本服务最大允许的 年度停机时间 |
24 h |
8 h |
4 h |
|
相应的可用性 |
99.7% |
99.9% |
99.95% |
|
单个子系统的可用性 |
99% |
99.6% |
99.9% |
|
注1:这些可用性指标适用于整个系统,并适用于所有硬件与软件的工作要求。对VTS工作带来显著影响的定 期维护工作也包括在这些可用性数据之中。 注2:工作于重点监控区域的VTS的可用性需要高于99.95%,此时,可能需要配置冗余的服务器和通信系统,甚 至配置备用的操作中心。 注3:如果需要的备件无法顺利投入使用,修理时间将会延长,并在一定程度降低可用性指标。因此,VTS宜配 备足够的备件并对维修服务做出计划安排,以满足可用性指标要求。 | |||
5.1.3.3系统设备的环境适应能力
系统设备的环境适应能力要求应按照表5和表6确定。
表5室内设备要求
|
科目 |
环境 | |
|
设备室 |
工作人员室 | |
|
温度 |
0 'C 〜45 'C |
10 'C〜35 'C |
|
相对湿度 |
在 45 'C时,V95% | |
|
防护等级(IP) |
IP 52(粉尘和水滴15°) |
IP 20 |
|
噪声 |
— |
1 m 范围内 V45 dB(Λ) |
表6户外设备要求
|
科目 |
环境 | ||
|
正常 |
极热 |
很冷 | |
|
温度 |
—30 'C 〜45 'C |
—10 'C〜55 'C |
针对具体现场条件 |
|
太阳辐射 |
≤1 120 W∕m2 | ||
|
紫外辐射 |
≤65 W∕m2 | ||
|
防护等级(IP) |
IP 65(尘密和喷水) | ||
|
腐蚀类别 |
C5-M (海洋环境) | ||
|
盐雾 |
盐度(1),相当于5%含盐量 | ||
|
风 |
针对现场具体条件 | ||
|
雷电 |
针对现场具体条件 | ||
5.1.4运行保障要求
为保障VTS的安全稳定运行,系统还应满足:
a) 系统软硬件采用经过严格质量检测和可靠性检验的成熟产品,对系统的关键硬件设备,采用必 要的冗余配置;
b) 系统有可靠的安全防范措施,达到国家信息系统安全等级保护二级(及以上)标准,以避免系统 软件、数据遭到攻击和破坏;
C)系统的各子系统之间具备时间同步功能,时间同步设备符合YD/T 2022的规定;
d) 系统具备对关键设备的工作状态实时监测、远程启停控制、联动控制等功能;
e) 系统的设备机房符合GB 50174的规定;
f) VTS雷达子系统的供配电设备符合GB 50052中一级负荷的规定,其他子系统的供配电设备 符合GB 50052中二级负荷的规定。
5.2子系统要求
5.2.1雷达子系统
5.2.1.1基本组成
雷达子系统由天线、雷达收发机和维修终端等组成。
5.2.1.2功能要求
雷达子系统主要功能要求如下:
a) 具备扇形发射/停止发射能力,扇形区域大小可配置;
b) 具备抗雨雪、海杂波自动滤波等功能;
C)具备冗余热备功能;
d) 具备脉冲重复频率、扇形发射区、抗海浪、抗雨雪、磁控管雷达脉冲宽度等参数的设置和记录功 能,并预置晴天、雨雪天、雾天等3个或以上的最佳工作模式;
e) 雷达维修终端应能够对雷达进行监测、控制、记录性能参数和故障信息,并显示雷达的原始 视频。
5.2.1.3性能要求
雷达子系统主要性能要求如下:
a) 雷达的距离分辨力和方位分辨力应满足5.1.3.1中规定的要求;
b) 雷达的发射功率、接收机灵敏度等应结合实际环境和需求具体确定。
5.2.1.4接口要求
5.2.1.4.1 接口类型
雷达收发机应预留2个以上信号输岀接口,其中至少包含一个模拟信号输岀接口。模拟信号输岀 接口采用同轴电缆输岀,数字信号输岀接口采用EIA-422、ElA-644或RJ-45输岀接口。
5.2.1.4.2数据类型
提供雷达视频数据、雷达目标航迹数据和雷达状态/控制数据。
5.2.1.4.3数据格式
雷达视频数据、雷达目标航迹数据和雷达状态/控制数据的数据格式要求详见附录BO
5.2.2 VHF通信子系统
5.2.2.1基本组成
VHF通信子系统由VHF收发信机、中央控制器和操作终端等组成o
5.2.2.2功能要求
VHF通信子系统主要功能要求如下: S
a) VHF频道设置方案可根据实际的使用效果和管理需求进行调整,调整方式应简单便捷;
b) VTS中心应能设置操作终端的VHF控制权和使用权的优先级;
C)在操作终端上能使用多个基站的多个频道来发布同一个信息;
d)语音播放模块应能实现话音录制和自动语音播发,且支持循环播放设置。
5.2.2.3性能要求
VHF通信子系统主要性能要求如下:
a) 在VTS区域内,VHF通信话音质量应符合ITU-TRec.P.863中3级或以上等级标准的规定;
b) VHF设立的呼叫和工作频道应避免同频干扰、三阶互调干扰等;
C)工作频率:156 MHz~174 MHz;
d) VHF通信子系统的其他性能应符合GB/T 32401中三级设备的要求。
5.2.2.4接口要求
5.2.24.1接口类型
EIA232C、EIA422 或 RJ-45 接 口 O
5.2.24.2数据类型
语音文字信息。
5.2.24.3数据格式
数据格式参照JT/T 628-2005的规定。
5.2.3 VHF-DF 子系统
5.2.3.1基本组成
VHF-DF子系统由前端传感器和VTS终端显示模块等组成。前端传感器一般包括至少2个 VHF-DF站,每个VHF-DF站包括VHF-DF天线、测向接收机、信号处理单元等。
5.2.3.2功能要求
VHF-DF子系统主要功能要求如下:
a)能够对在VHF通信链路上进行通信的船舶进行测向或定位,具有至少8个可同时工作的测 向信号通道;
11
b)每个操作终端能够根据需要选择单个或多个VHF-DF基站的监测频率。
5.2.3.3性能要求
VHF-DF子系统主要性能要求如下:
a) 工作频率:156 MHZ 〜174 MHz;
b) 测向误差:≤1.5°;
C)测向灵敏度:≤2 μV∕m0
5.2.3.4接口要求
5.2.3.4.1 接口类型
EIA232、EIA422 或 RJ-45 接 口 O
5.2.3.4.2数据类型強
方位数据。
5.2.3.4.3数据格式
单位为度(O)O
5.2.4数据接入子系统
5.2.4.1基本组成
数据接入子系统由AIS、视频监控、水文气象、北斗卫星导航等数据接入设备组成。
5.2.4.2功能要求
数据接入子系统主要功能要求如下:
a) 能够接入船舶的AIS信息,包括船舶标识、船名、船型、船舶吃水、位置、对地航向、对地航速、 危险货物、目的地、计划航行路线等;
b) 能够接入前端摄像机视频监控数据;
C)能够接入北斗卫星的基本导航数据和短报文通信数据,包括船舶的位置信息、航速信息、UTC 信息、短报文信息等;
d) 能够接入水文气象数据,包括风速、风向、温湿度、气压、水流流速等信息;
e) 能够接入VTS需要的其他类型的数据。
5.2.4.3性能要求
数据接入子系统主要性能要求如下:
a) AIS数据接入性能要求如下:
1) AIS信息传输速率:≥9 600 bit/s;
2) 数据接入延时时间:≤500 mso
b) 视频监控数据接入性能要求如下:
1) 数据传输带宽:≥2 Mbit/s;
2) 能够以不少于每秒25帧的速度传输分辨率720P(及以上)图像。
C)北斗卫星导航数据接入性能要求如下:
1) BDS信息传输速率:≥9 600 bit/s;
12
2) 数据接入延时时间:≤5OOms;
3) 授时误差:≤5O ns。
5.2.4.4接口要求
5.2.4.4.1 接口类型
EIA232、ElAT85、EIAT22 和 RJ-45 等接 口。
5.2.4.4.2数据类型
船舶静态/动态信息、航行信息、视频监控信息,视频监控设备控制信息、船舶北斗卫星导航数据(位 置、速度、时间)、短报文通信、水文气象监测信息等数据。
5.2.4.4.3数据格式
数据接入子系统数据格式应符合如下规定:
a) AIS数据格式符合GB/T 2OO68的规定;
b) 视频监控数据格式符合GB/T 28181的规定;
C)北斗卫星导航数据格式符合GB/T 3O287.2的规定;
d)水文气象数据格式符合GB/T 17838的规定。
5.2.5数据综合处理子系统
5.2.5.1基本组成
数据综合处理子系统由雷达数据处理器和多传感器综合处理器等组成。
5.2.5.2功能要求
数据综合处理子系统主要功能要求如下:
a) 雷达数据处理器应具备如下功能:
1) 能够对雷达站的雷达信号进行数字化、杂波处理及信号压缩,形成雷达数字视频;
2) 能够实现雷达站本地雷达视频处理、目标录取和跟踪处理等设备的状态监测和参数设置 功能;
3) 断电停止工作后,再次通电应能够自启动并恢复运行。
b) 多传感器综合处理器应具备如下功能:
1) 能够统计识别和未识别的跟踪目标数及跟踪丢失目标数,并记录通过船舶报告线的船舶 信息、数量及时间;
2) 能够对雷达数字视频和跟踪信息、AIS、BDS、VHF-DF、视频监控以及水文气象等数据进 行融合处理,实现目标自动识别和交通形势分析评估等功能,可预判事件等级进行报警;
3) 具备冗余热备功能。
5.2.5.3性能要求
数据综合处理子系统主要性能要求如下:
a) 目标发生会遇、追越或交叉时,在1O个扫描周期内跟踪丢失率≤1O% ;
b) 在目标航向和航速基本不变或基本按照预定的航向和航速航行的情况下,当跟踪目标被遮挡 时间≤6O S时,系统岀现误跟踪、漏跟踪或跟踪丢失的概率≤1O% ;
C)雷达数据处理器单站跟踪目标容量≥1 OOO个,多传感器综合处理器跟踪目标容量
13
≥1OOOO 个;
d)雷达数据处理器的定位误差、跟踪误差、最大可跟踪直线速度和最大可跟踪加速度应满足 5.1.3.1中规定的VTS要求O
5.2.5.4接口要求
5.2.5.4.1 接口类型
EIA-232 或 RJ-45 接 口 O
5.2.5.4.2数据类型
系统的输岀为以下经过综合处理后的数据:
a) 雷达目标数据;
b) VHF通信数据;
C) VHF-DF 数据;
d) 管理信息子系统数据;
e) AIS、视频监控、水文气象、北斗卫星导航等外部接入数据o
5.2.5.4.3数据格式
数据综合处理子系统的数据格式应与其他子系统输岀的数据格式相匹配。
5.2.6交通显示与控制子系统
5.2.6.1基本组成
交通显示与控制子系统由交通显示与控制系统工作站和交通显示器等组成。
5.2.6.2功能要求
交通显示与控制子系统主要功能要求如下:
a) 能够显示电子海(江)图、雷达视频图像、目标跟踪状态、VHF测向信息、目标统计信息、AIS数 据、视频监控数据、北斗卫星导航数据、水文气象数据、用户编辑区域等,并能够根据需要选择 显示内容;
b) 能够实现任意位置偏心显示、无级缩放交通图像、对选择区域进行全屏显示、开窗显示特定窗 口等功能;
C)支持符合国内和国际标准的标准电子海(江)图格式,能够实现自动更新电子海(江)图,支持光 盘电子海(江)图数据和U盘电子海(江)图数据导入等功能;
d) 能够关联显示船舶数据库的船舶档案、航行计划等信息;
e) 能够设定和修改各类报警区域,设置文字弹岀、视觉提示、声音提示等报警方式;
f) 能够对雷达、VHF通信、雷达数据处理器和视频监控等设备进行远程操作;
g) 能够提供操作、培训、重放等不同的操作模式;
h) 能够记录和保存系统信息和用户操作信息。
5.2.6.3性能要求
交通显示与控制子系统主要性能要求如下:
a) 交通显示器上一个操作命令的响应时间:≤5OO ms;
b) 海(江)图缩放、移动操作完成后,船舶目标标签、雷达回波等应能在5OO ms内自动实现与海
(江)图的匹配;
C)雷达视频回波、雷达目标信息的刷新时间:≤3 SO
5.2.6.4接口要求
5.2.6.4.1 接口类型
RJ-45 接 口 o
5.2.6.4.2数据类型
各子系统的控制指令数据。
5.2.6.4.3数据格式
对于其他需要交管对其进行控制的子系统,符合其所要求的控制指令数据格式。
5.2.7管理信息子系统
5.2.7.1基本组成
管理信息子系统主要由管理信息服务器和数据库客户端等组成。
5.2.7.2功能要求
管理信息子系统主要功能要求如下:
a) 能够以服务接口的形式实现VTS与VTS主管机关数据中心的数据共享,具备VTS对船舶交 通管理的辅助决策功能;
b) 能够实现按照时间、船名、呼号、MMSI等对数据库中的信息进行查询的功能;
C)能够实现数据分析统计功能,并自动生成VTS主管机关运行管理要求的报表;
d) 能够实时接收多传感器综合处理子系统传入的信息,并根据实际情况输岀定制化数据;
e) 能够实现排班计划、值班日志记录、值班信息发布等值班管理功能;
f) 能够实现用户管理和权限管理功能。
5.2.7.3性能要求
管理信息子系统主要性能要求如下:
a) 系统最长响应时间:≤5OOms;
b) 船舶位置更新间隔:≤3 SO
5.2.7.4接口要求
5.2.7.4.1 接口类型
RJ-45 接 口 O
5.2.7.4.2数据类型
数据类型应符合IALA V-145的规定。
5.2.7.4.3数据格式
数据格式应符合IALA V-145的规定。
15
5.2.8记录重放子系统
5.2.8.1基本组成
记录重放子系统由记录服务器、记录重放软件、网络存储器等组成。
5.2.8.2功能要求
记录重放子系统主要功能要求如下:
a) 能够实现循环记录存储的功能,在磁盘空间饱和的情况下新产生的数据会覆盖历史最早的数 据。系统记录的数据应包含雷达视频数据、VHF语音数据、跟踪目标航迹数据、AIS数据、目 标关联数据ʌVHF-DF数据、水文气象数据、报警信息、操作记录数据等。
b) 能够实现数据重放功能,根据选择数据源类型、时间和检索结果进行自由组合同步重放。
C)能够实现自定义导岀通用数据格式,并进行格式转换。
d)能够实现多倍速的快放、慢放及反方向播放,边记录边播放等功能。
5.2.8.3性能要求
记录重放子系统主要性能要求如下:
a) 数据连续储存时间:≥90d; S
b) 同步时间误差:≤500 ms;
C)响应时间:≤500 ms°
5.2.8.4接口要求
5.2.8.4.1 接口类型
RJ-45 接 口 O
5.2.8.4.2数据类型
雷达视频数据、VHF语音数据、跟踪目标航迹数据、AIS数据、目标关联数据、VHF-DF数据、水文 气象数据、报警信息、操作记录数据等类型。
5.2.8.4.3数据格式
记录重放系统数据应以文件形式存放在存储器中,并提供这些数据文件的数据格式说明。
5.2.9信息传输与网络子系统
5.2.9.1基本组成
信息传输与网络子系统由前端路由设备、传输链路和中心路由设备等组成。
5.2.9.2功能要求
信息传输与网络子系统主要功能要求如下:
a) 网络层应支持IP协议,传输层应支持TCP和UDP协议;
b) 各网络设备断电停止工作后,再次通电后应能够自启动并恢复运行;
C)按照不同的信息处理类型,可在不同的虚拟局域网(VLAN)实施数据传递和交换。
5.2.9.3性能要求
信息传输与网络子系统主要性能要求如下:
a) 网络带宽能够保证VTS所有子系统数据传输的质量和稳定性,并预留20%带宽容量余量;
b) 网络时延:≤400 ms;
C)时延抖动:≤50ms;
d)丢包率:≤0.1%。
5.2.9.4接口要求
霉接口类型:光纤接口、RJT5接口等。
5.2.10信息交换与共享子系统
5.2.10.1基本组成
信息交换与共享子系统由服务器、数据库和信息交互平台等组成。
5.2.10.2功能要求
信息交换与共享子系统主要功能要求如下:
a) VTS应按照IALA V-145的规定向其他VTS或第三方系统共享VTS数据,包括航迹数据、 船舶数据和航程数据;
b) VTS应能从第三方共享数据库接入船舶相关数据,包括船舶基础数据、船企基础数据、通航环 境基础数据、船舶业务动态数据、船员基础数据等。
5.2.10.3性能要求
信息交换与共享子系统主要性能要求如下:
a) 系统存储容量应满足项目建设实际需求,并留有20%的余量;
b) 数据连续储存时间:≥90d;
C)响应时间:≤500 ms°
5.2.10.4接口要求
5.2.10.4.1 接口类型
RJ-45 接 口 O
5.2.10.4.2数据类型
数据类型应符合IALA V-145的规定。
5.2.10.4.3数据格式
数据格式应符合IALA V-145的规定。
6试验方法 6.1总则
在对VTS进行正式试验前,应满足如下实验条件:
a) 完成全套设备到达现场的开箱检验,设备型号、数量、生产厂家、岀厂日期、备品备件数量、技术 文件以及生产合格证和设备外观等均应满足要求;
b) 确认完成了全套系统的安装、连接、调试和标定,各项测量误差已调至最小;
C)依据现场验收测试条件,参照本标准规定的系统设备现场检验内容与方法,拟定检验计划、实 施步骤与方法以及检验记录表格等;
d) 备妥所需的测试仪器、设备与工具,所用仪器应备有近期(半年内)检验合格证;
e) 商定参加系统设备现场检验的人员和分工;
f) 系统供货商应提供全套符合本标准及合同文件要求的验收文本。
6.2系统总体试验方法 6.2.1功能试验
系统功能试验方法:检查VTS是否具有5.1.2规定的各项基本功能O
6.2.2性能试验 6.2.2.1性能要求试验
VTS性能要求试验应选择在晴天,3级及以下海况下展开,所使用的高精度差分定位设备定位误 差不大于0.5 m,方法如下:
a)距离分辨力测试:
选择两个测试目标,初始位于雷达站同方位且保持一定距离,确保两个目标的雷达回波清晰可辨, 测试目标沿雷达同方位向另一目标靠近,记录测试目标与点目标在回波融合瞬间的间距,测试不少 于10次。计算系统的距离分辨力狉,确认是否满足5.1.3.1规定的要求。
距离分辨力计算见式(1):
1 犖
Δr = — y狉 ..............................(1 )
狀窗
式中:
r ———测试目标与点目标间距的测量值; 零
狀——测试次数。
b)方位分辨力测试:
选择两个测试目标,初始位于距离雷达站同距离不同方位的位置,确保两个目标的雷达回波清晰可 辨,测试目标向另一固定点目标靠近(靠近过程中两目标保持与雷达站同距离),记录测试目标与点 目标在回波融合瞬间的两目标间距和测试目标与雷达站之间的距离,测试不少于10次。计算系统
的方位分辨力Δs确认是否满足5.1.3.1规定的要求O
方位分辨力计算见式(2):
1 犖 180° Δα =—〉--
(2)
狀自 π
式中:
Rt ———测试目标与雷达站间距离的测量值;
18 △L ——测试目标与点目标间距离的测量值; 狀一-—测试次数。 C)静止目标定位误差测试: 选择一个静止的测试目标(目标等效RCS宜为1 m2),将高精度差分定位设备固定在测试目标上, 开启高精度差分定位设备数据采集和定位功能,分别记录高精度差分定位设备测得的测试目标的 经纬度信息(需转换为距离方位数据)与VTS给岀的测试目标的距离和方位,每次记录时间不少于 2 mm,测试不少于10次。分别计算距离固定误差平均值犃狉、方位固定误差平均值犃见、距离误差 标准差%和方位误差标准差,并计算距离最大误差ER m*和方位最大误差EamaX,确认是否满足 5.1.3.1规定的要求。
测量误差计算见式(3)和式(4):
狀M
1 二
误差标准差计算见式(5)和式(6):
/1 犖
σ a =槡狀—1 ∑ (a - a ι - A a ) 2
式中: Rt —-一VTS距离测量值; a, —-一VTS方位测量值; Ri——根据高精度差分定位设备测得的经纬度信息转换得到的距离值; aι —-一根据高精度差分定位设备测得的经纬度信息转换得到的方位值; Tl ——测试次数。
最大误差计算公式为:ERmaX= IArl +3。狉Eamax= IAal +3" d)运动目标定位误差测试: 选择一个移动的测试目标(目标航速不宜低于5 kn),将高精度差分定位设备固定在测试目标上, 开启高精度差分定位设备数据采集和定位功能,每间隔1 S分别记录一次高精度差分定位设备测 得的测试目标的经纬度信息(需转换为距离方位数据)与VTS给岀的测试目标的距离和方位,记录 时间不少于2 mm。分别计算距离固定误差平均值A,、方位固定误差平均值Aa、距离误差标准差 ^和方位误差标准差J,并计算距离最大误差ERmaX和方位最大误差EamaX ,确认是否满足5.1.3.1 规定的要求。
测量误差计算见式(7)和式(8):
狀篇
.
误差标准差计算见式(9)和式(10):
/^^1 犖
σ =JT — 1 ∑ (a t — ait — Aa ) 2 ..............................( 10 )
19
式中:
Rl——VTS距离测量值;
α, ——VTS方位测量值;
Rll——根据高精度差分定位设备测得的经纬度信息转换得到的距离值; α 一—一根据高精度差分定位设备测得的经纬度信息转换得到的方位值; n 记录次数。
最大误差计算公式为:ERmaX= IAJ +3σ狉,Ee= | A^ +3σα。
e)目标跟踪误差测试:
选择一个移动的测试目标(目标航速不宜低于5 kn),将高精度差分定位设备固定在测试目标上, 开启高精度差分定位设备数据采集和定位功能,每间隔1 S分别记录一次高精度差分定位设备测 得的测试目标的经纬度信息(需转换为距离方位数据)与VTS给岀的测试目标的航速和航向,记录 时间不少于2 mιn0分别计算航速固定误差平均值Av、航向固定误差平均值A。、航速误差标准差 σ犞和航向误差标准差。。,并计算航速最大误差EVmaX和航向最大误差E(WX,确认是否满足5.1.3.1 中规定的要求。
测量误差计算见式(11)和式(12):
AV =丄∑ (Vl -VIl) ..............................( 11 )
n M
A 0 = 一 ((犻—(Ii) ..............................( 12 )
n M
误差标准差计算见式(13)和式(14):
σv =J-1 ∑ (Vi-Vi-Av)2 ........................( 13 )
槡 n-1i=
σo =Jn∑1Σ∑ O — On -AO)2 ........................( 14 )
式中:
Vi——VTS距离测量值;
Oi ——VTS方位测量值;
Vli—— 根据高精度差分定位设备测得的经纬度信息转换得到的距离值;
Oii ——根据高精度差分定位设备测得的经纬度信息转换得到的方位值;
n --记录次数。
最大误差计算公式为:EVmaX= IAV I +3σV ; EOmaX= IAJ +3"
f)目标最大可跟踪直线速度/加速度性能测试:
测试目标以最大加速度均匀加速到最大速度(直线前进),记录系统能够保持稳定跟踪的最大直线 速度和最大加速度。测试不少于10次,计算最大可跟踪直线速度∆VmaX和最大可跟踪加速度
ΔαmaX,确认是否满足5.1.3.1规定的要求。 最大跟踪速度计算见式(15):
n
△V = — V AVm5 .
(15 )
∆ V maX n /」∆ V maX_i
最大跟踪加速度计算见式(16):
(16 )
式中:
∆Vma*n 系统能够保持稳定跟踪的最大直线速度;
∆αma*n 系统能够保持稳定跟踪的最大加速度;
20
狀 ——测试次数。
g)目标最大可跟踪角速度性能测试:
测试目标以最大速度作匀速圆周运动(确保船舶本身航行安全),记录系统能够保持稳定跟踪的最 大角速度。测试不少于10次,计算最大可跟踪角速度Δθπm确认是否满足5.1.3.1规定的要求。
最大跟踪角速度计算见式(17):
1 狀
Δθmax =二 ∑ Δ°md,
(17 )
式中:
Δθmd, 系统能够保持稳定跟踪的最大角速度;
狀 ——测试次数。
6.2.2.2可用性试验
VTS可用性试验方法如下:
按照GB/T 37079的规定进行测试得到VTS的MTTF和MTBF的数值,计算VTS的可用性,确 认是否满足表4规定的要求。
系统可用性计算公式为:可用性= (MTTF∕MTBF)X100⅞ O
6.2.2.3环境适应能力试验
VTS环境适应能力试验方法如下:
a) 室内温度:按照GB/T 2423.1和GB/T 2423.2的规定进行测试;
b) 室内湿度:按照GB/T 2423.3的规定进行测试;
C)室内防护等级:按照GB/T 4208的规定进行测试;
d) 室内噪声:按照GB/T 14574的规定进行测试;
e) 户外温度:按照GB/T 2423.1和GB/T 2423.2的规定进行测试;
f) 太阳辐射:按照GB/T 2423.24的规定进行测试;
g) 紫外辐射:按照IEC 60945的规定进行测试;
h) 户外防护等级:按照GB/T 4208的规定进行测试;
1) 腐蚀:按照ISO 129446的规定进行测试;
j) 盐雾:按照GB/T 2423.17的规定进行测试;
k) 风:按照GB/T 2423.41的规定进行测试;
l) 雷电:按照GB/T 21431的规定进行测试。
6.3子系统试验方法
6.3.1雷达子系统
6.3.1.1功能试验
雷达子系统功能试验方法如下:
a) 收发机扇区发射功能测试:在雷达子系统中设置一定角度的静默区0°〜360°,观察该区域内雷 达回波的显示情况;
b) 抗雨雪/海杂波自动滤波功能测试:选择雨雪和海杂波天气进行试验,观察雷达抗雨雪和海杂 波自动滤波效果;
C)冗余热备功能测试:重启一台正在工作的雷达收发机,观察交通显示器上的雷达回波显示 情况;
21
d) 参数设置和记录功能测试:在VTS中心和雷达站分别调节脉冲重复频率、扇形发射区、抗海 浪、抗雨雪和磁控管雷达脉宽参数等雷达设置参数,并选择晴天、雨雪天和雾天预置模式,观察 雷达视频变化情况;
e) 维修终端控制功能试验:在维修终端查看雷达运行状态并进行控制操作,观察控制操作是否生 效;打开记录文件夹,查看性能参数和故障信息记录情况;查看雷达原始视频的显示情况。
6.3.1.2性能试验
雷达子系统性能试验方法如下:
a) 雷达的距离分辨力和方位分辨力试验方法与6.2.2.1相同;
b) 雷达发射功率和接收机灵敏度按照GB/T 12649的规定进行测试。
6.3.1.3接口试验
雷达子系统接口试验方法:由雷达子系统向虚拟接收方分别发送雷达视频数据、雷达目标航迹数据 和雷达状态/控制数据,然后检测所发送的数据类型和格式是否符合5.2.1.4.2和5.2.1.4.3的要求。
6.3.2 VHF通信子系统
6.3.2.1功能试验
VHF通信子系统功能试验方法如下:
a) 频道设置功能测试:在操作终端改变VHF频道设置,然后在设置的频道进行语音呼叫,确认 语音播发情况。
b) 优先级设置功能测试:在VHF显示终端软件中将某操作终端设置为第一优先级,另一操作终 端设置为第二优先级。测试时,在低优先级操作终端喊话的同时,尝试用较高优先级操作终端 进行播报信息,确认高优先级操作终端是否能够抢断低优先级操作终端的喊话。
C)同步发布功能测试:控制所有基站的所有频道来发布相同信息,确认发布情况。
d)录制、自动语音播发和循环播放功能测试:录制一段特定语音,然后进行自动播发和循环播放, 确认播发的语音与所录制的语音相同且系统支持自动播发和循环播放。
6.3.2.2性能试验
VHF通信子系统性能试验方法如下:
a) 通话质量使用ITU-T Rec.P.863推荐的音频质量测试软件进行测试。
b) 在VHF通信系统中所有频道进行通话,检查是否存在同频干扰现象。然后计算设置的频道 是否存在三阶互调干扰现象。
C)其他性能指标按照GB/T 32401的规定进行测试。
6.3.2.3接口试验
VHF通信子系统接口试验方法:由VHF通信子系统向虚拟接收方发送语音文字信息,然后检测 所发送的数据类型和格式是否符合5.2.2.4.2和5.2.2.4.3的要求。
6.3.3 VHF-DF 子系统
6.3.3.1功能试验
VHF-DF子系统功能试验方法如下:
a)测向定位功能测试:在操作终端通过VHF与8艘船舶直接通信,检查VHF-DF输岀的每艘通 22
信船舶的位置和测向信息是否正确;
b)频道切换功能测试:在操作终端选择和切换VHF-DF基站,并修改其监测频率,然后呼叫对应 基站和频率的测试船舶确认位置和测向信息是否正确。
6.3.3.2性能试验
VHF-DF子系统性能试验方法如下:
a) 测向误差:按照GB/T 34089的规定进行测试;
b) 测向灵敏度:按照GB/T 34089的规定进行测试。
6.3.3.3接口试验
接口试验方法:由VHF-DF子系统向虚拟接收方发送位置数据,然后检测所发送的数据类型和格 式是否符合5.2.3.4.2和5.2.3.4.3的要求O
6.3.4数据接入子系统
6.3.4.1功能试验
数据接入子系统功能试验方法如下:
a) AIS信息接入功能测试:在VTS交通显示与控制子系统查看过往船舶的船名、船型、船舶吃 水、位置、对地航向、对地航速、危险货物、目的地、计划航行路线、UTC等AIS信息是否完整 且正确;
b) 视频监控接入功能测试:在VTS交通显示与控制子系统查看接入的监控视频是否显示对应 区域;
C)北斗卫星导航数据接入功能测试:在VTS交通显示与控制子系统查看船舶的位置、航速、 UTC等信息是否完整且正确;
d)水文气象信息接入功能测试:在VTS交通显示与控制子系统查看风速、风向、温湿度、气压、水 流流速等信息是否完整且正确。
6.3.4.2性能试验
数据接入子系统性能试验方法如下:
a) AIS/北斗卫星导航信息传输速率测试:向数据接入子系统传输10 000条随机的AIS信息数据 和10 000条随机的北斗卫星定位数据,计算岀传输数据所用的总时间,通过总数据量的大小 计算传输速率是否≥9 600 bit/s;
b) AIS/北斗卫星导航数据接入延时测试:在系统中进行10 000次AIS数据和10 000次北斗卫 星导航数据接入请求,记录系统每次的数据接入延迟时间并计算平均接入延迟时间,确认系统 的平均响应时间是否≤500 ms;
C)视频监控数据接入带宽测试:向数据接入子系统传输10 000条随机的视频监控数据,通过测 试传输速度计算岀传输的实际带宽,确认系统的视频监控数据传输带宽是否≥2 Mbit/s;
d)视频监控图像传输速率测试:向数据接入子系统传输10 000张随机的分辨率720P视频监控 图像,计算岀传输数据所用的总时间,通过总数据量的大小计算传输速率是否满足每秒不少于 25帧O
6.3.4.3接口试验
数据接入子系统接口试验方法:由数据接入子系统向虚拟接收方分别发送船舶静态/动态信息、航
23 行信息、视频监控信息,视频监控设备控制信息、船舶北斗卫星导航数据(位置、速度、时间)、短报文通 信、水文气象监测信息等数据,然后检测所发送的数据类型和格式是否符合5.2.4.4.2和5.2.4.4.3的 要求。
6.3.5数据综合处理子系统 6.3.5.1功能试验
数据综合处理子系统功能试验方法如下:
a) 视频显示与压缩功能测试:从雷达输入至雷达数据处理器经过信号处理后,检验形成的数字视 频是否能在雷达数据处理器中显示,确认视频压缩率是否能够设置,分别计算岀原始视频的大 小以及压缩后视频的大小。
b) 状态监测与参数设置功能测试:在雷达数据处理器中,确认目标能够手动录取跟踪,并记录跟 踪信息;改变参数的设置,观察视频信号是否改变。
C)通电自启动功能测试:在雷达数据处理器运行时切断电源,重新连接电源后,观察雷达数据处 理器是否能够自动启动并正常运行。
d) 跟踪统计功能测试:在多传感器综合处理器中检索识别和未识别的跟踪目标信息以及跟踪丢 失目标信息,确认这些信息是否持续更新。检索重点关注区域(锚地、自动跟踪区)内的目标 数,检查目标数量是否正确;检索通过报告线的船舶信息、数量以及时间,每当有船舶通过报告 线后,观察多传感器综合处理器中通过报告线的船舶信息是否持续更新,以及是否按照船舶种 类进行分类统计。
e) 数据融合功能测试:观察多传感器综合处理器的输岀,观察雷达目标与AIS目标是否准确 叠加。
f) 冗余热备功能测试:重启一台正在工作的多传感器综合处理器,观察前端雷达回波以及目标信 息是否存在,另一台机器是否能够自动顶替前一台机器的角色。
6.3.5.2性能试验
数据综合处理子系统性能试验应选择在晴朗的白天,3级及以下海况下展开,方法如下:
a)目标追越跟踪性能测试:
选择两个测试目标(目标航速不宜低于2 kn),初始保持300 m〜500 m间距,调整测试目标航
速航向,确保测试目标在追越过程中满足:
1) 测试目标的雷达回波融合周期数不低于10(10〜20个雷达扫描周期为宜);
2) 测试目标在雷达回波融合前后10周期内保持航速航向稳定。
测试过程示意图见图3,在VTS交通显示器上观察两个测试目标的跟踪情况,若仍能保持跟 踪不交换、不丢失,则记录跟踪成功,否则记录跟踪失败。重复上述测试不少于10次,计算跟 踪成功率PS,确认是否满足5.2.5.3a)规定的要求。
跟踪成功率计算见式(18):
p _ 1 P, S _J1 (跟踪成功)
........................(18 )
狊W ∑s' , &烆0 (跟踪不成功)
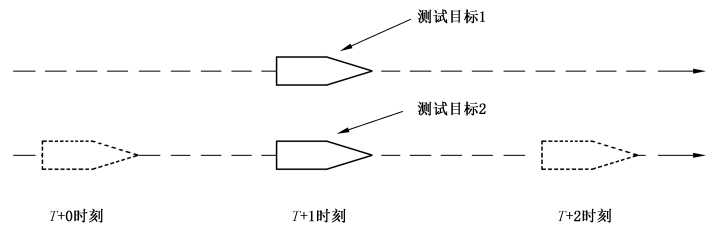
图3追越测试示意图
b)目标会遇跟踪性能测试:
选择两个测试目标(目标航速不宜低于2kn),初始保持300 m〜500 m间距,调整测试目标航 速航向,确保测试目标在会遇过程中满足:
1) 测试目标的雷达回波融合周期数不低于10(10〜20个雷达扫描周期为宜);
2) 测试目标在雷达回波融合前后10周期内保持航速航向稳定。
测试过程示意图见图4,在VTS交通显示器上观察两个测试目标的跟踪情况,若仍能保持跟 踪不交换、不丢失,则记录跟踪成功,否则记录跟踪失败。重复上述测试不少于10次,计算跟 踪成功率Ps,确认是否满足5.2.5.3a)规定的要求。
跟踪成功率计算见式(19):
_1狀 _1 (跟踪成功)
(19 )
S =狀∑s, Sl = 0 (跟踪不成功)
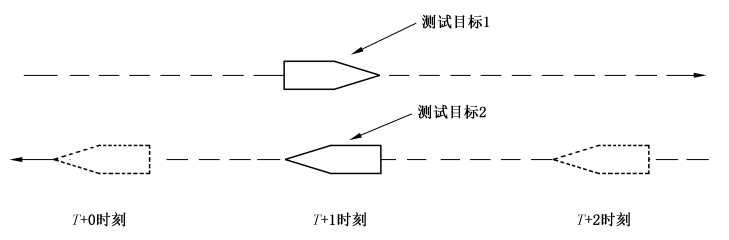
图4会遇测试示意图
C)目标交叉跟踪性能测试: 強
选择两个测试目标(目标航速不宜低于2 kn),初始保持300 m〜500 m间距,两个测试目标航 向成20°〜70°角交叉行驶,调整测试目标航速航向,确保测试目标在交叉过程中满足:
1) 测试目标的雷达回波融合周期数不低于10(10〜20个雷达扫描周期为宜);
2) 测试目标在雷达回波融合前后10周期内保持航速航向稳定。
测试过程示意图见图5,在VTS交通显示器上观察两个测试目标的跟踪情况,若仍能保持跟 踪不交换、不丢失,则记录跟踪成功,否则记录跟踪失败。重复上述测试不少于10次,计算跟 踪成功率Ps,确认是否满足5.2.5.3a)规定的要求。
跟踪成功率计算见式(20):
_1狀 _1 (跟踪成功)
S =狀顼,SI = 0 (跟踪不成功)
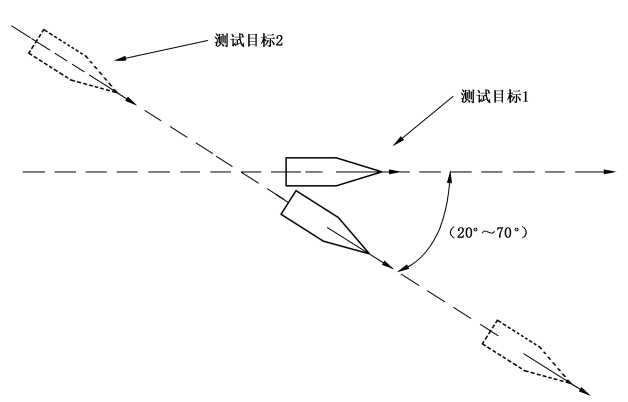
图5交叉测试示意图
d)目标遮挡跟踪性能测试:
用VTS对测试目标进行跟踪,为等效目标遮挡场景,关闭雷达设备无线电发射功能,1 min后 打开雷达设备的无线电发射功能。在VTS中心交通显示器上观察测试船的跟踪情况,若仍 能保持测试船的跟踪不丢失,则记录跟踪成功,否则记录跟踪失败。重复上述测试不少于 10次,计算跟踪成功率Ps,确认是否满足5.2.5.3b)规定的要求。
跟踪成功率计算见式(21):
PS=-况員,Sl = (1 (跟踪吁: ........................(21 )
狀J 0 (跟踪不成功)
6.3.5.3接口试验
数据综合处理子系统接口试验方法:由数据综合处理子系统向虚拟接收方分别发送处理后的目标 融合数据、雷达目标数据∖VHF-DF设备、水文气象数据、AIS、北斗定位信息、VHF通信、视频监控视频 和管理信息系统信息等数据,然后检测所发送的数据类型和格式是否符合5.2.5.4.2和5.2.5.4.3的 要求。
6.3.6交通显示与控制子系统
6.3.6.1功能试验 強
交通显示与控制子系统功能试验方法如下:
a) 交管显示功能测试:
1) 打开交通显示与控制子系统客户端,以任何权限进入交通显示与控制子系统,观察电子海 (江)图能否正确加载,电子海(江)图要素信息是否完整且正确;
2) 观察交通显示与控制子系统中是否可以显示雷达视频图像、目标跟踪状态、VHF测向信 息、AIS数据、视频监控数据、北斗卫星导航数据、水文气象数据、用户自定义区域等信息, 并观察能否根据需要选择显示的内容;
3) 观察交通显示与控制子系统是否具有AlS目标统计数、雷达目标统计数、融合目标统计 数以及多功能区域目标统计数等功能。
b) 偏心显示、无级缩放交通图像、选择区域全屏显示、开窗显示特定窗口功能测试:在交通显示与 控制子系统中进行移动界面、缩放界面、偏心显示、选择区域全屏显示和开窗显示特定窗口操
作,观察是否具备这些功能,并且确认这些功能是否能够正常使用。
C)海(江)图实时更新和导入功能测试:插入含有S57/S63格式海(江)图电子数据的光盘或者U 盘,重新启动交通显示与控制子系统,观察海(江)图数据是否能够正确导入,根据临近两个海 (江)图版本,确认海(江)图变化是否已经实时更新。
d) 数据关联功能测试:在交通显示与控制子系统中对未进行数据关联的目标进行关联操作,观察 是否能够获取船舶档案和航行计划等信息。
e) 报警区域功能测试:在交通显示与控制子系统中设置报警区域,检查报警区域的报警优先级是 否能够设置,报警形式是否能够自定义选择(文字弹岀、跟踪闪烁、声音报警等);观察报警是否 能够成功触发,报警形式和报警顺序是否与设定一致。
f) 远程操作功能测试:
1) 雷达控制:在交通显示与控制子系统中选择任一雷达,对其进行控制操作,确认控制操作 是否生效;
2) VHF控制:在交通显示与控制子系统中调节VHF的音量、频道并进行远程开关,确认控 制操作是否生效;
3) 雷达数据处理器控制:在交通显示与控制子系统中调节雷达数据处理设备的各项参数,观 察处理后的雷达视频,确认控制操作是否生效;
4) 视频监控控制:在交通显示与控制子系统中调节视频监控摄像头的拍摄角度并进行远程 开关,观察实时监控视频,确认控制操作是否生效。
g) 操作模式功能测试:在交通显示与控制子系统中切换不同的操作模式(操作、培训、重放、系统 设置、监控模式),确认控制操作是否生效。
h) 信息记录功能测试:在交通显示与控制子系统中先保存当前的系统信息和用户操作信息,然后 重新登录系统加载先前保存的信息,观察是否与先前保存的信息一致。
6.3.6.2性能试验
交通显示与控制子系统性能试验方法如下:
a〉响应时间:对系统进行1 OOO次随机操作,记录系统每次的响应时间并计算平均响应时间,确 认系统的平均响应时间是否≤5OO ms;
b)海图操作匹配时间测试:在交通显示与控制子系统中进行1 OOO次海图缩放和海图移动等操 作,记录雷达回波和目标标签的刷新时间,并计算平均操作匹配时间,确认其是否≤5OO ms;
C)信息刷新时间:在交通显示与控制子系统中刷新一艘运动船舶的雷达回波以及AIS信息,观 察刷新时间是否≤3 SO
6.3.6.3接口试验
交通显示与控制子系统接口试验方法:由交通显示与控制子系统向虚拟接收方分别发送各子系统 的控制指令数据,然后检测所发送的数据类型和格式是否符合5.2.6.4.2和5.2.6.4.3的要求。
6.3.7管理信息子系统
6.3.7.1功能试验
管理信息子系统功能试验方法如下:
a) 数据共享功能测试:测试管理信息系统提供的服务接口,能否与VTS主管机关的数据中心实 现数据共享;
b) 模糊查询功能测试:在管理信息子系统中按照时间(时、天、月、季、年)、船舶的船名、呼号、
MMSI等对数据库中的信息进行查询,确认查询结果是否正确;
C)数据分析统计功能测试:在管理信息子系统中对数据进行调用,确认系统是否能用柱状图、饼 状图和曲线图等方法表示船种分布、流量分布和密度分布等数据,并自动生成符合VTS主管 机关运行管理要求的报表;
d) 信息输岀功能测试:操作管理信息子系统输岀船舶基本信息、航行计划信息、航程信息、锚泊信 息、靠离泊信息等定制化数据,确认输岀的数据是否正确;
e) 值班管理功能测试:在管理信息子系统中进行排班计划,记录值班日志和发布值班信息等操 作,确认操作是否生效;
f) 用户管理功能测试:在管理信息子系统中进行创建用户、查找用户、修改用户信息和权限、删除 用户等操作,确认操作是否生效。
6.3.7.2性能试验
管理信息子系统性能试验方法如下:
a) 响应时间:对系统进行IoOO次随机操作,记录系统每次的响应时间并计算平均响应时间,确 认系统的平均响应时间是否≤5OO ms;
b) 船舶位置更新间隔:在管理信息子系统中对船舶的位置进行更新,确认位置的更新时间是否≤3 SO
6.3.7.3接口试验
管理信息子系统的接口试验应按照IALA V-145的规定进行。
6.3.8记录重放子系统
6.3.8.1功能试验
记录重放子系统功能试验方法如下:
a) 循环记录存储功能测试:开启记录储存功能,系统运行一段时间后,对系统中记录的数据进行 随机抽取和回放,并确认系统记录的数据是否包含雷达视频数据、VHF语音数据、跟踪目标航 迹数据、AIS数据、目标关联数据、VHF-DF数据、水文气象数据、报警信息、操作记录数据等, 在磁盘空间满的情况下在系统中记录新数据,确认新数据是否能够覆盖历史最早的数据。
b) 数据重放功能测试:随机选择不同数据源类型、时间和检索结果的记录进行自由组合和同步重 放操作,确认操作是否生效。
C)导岀数据功能测试:分别选择不同的通用导岀格式(如avι视频格式、MP3音频格式等)对系统 中的记录数据进行导岀,确认导岀的数据格式是否与选择的格式一致。
d)重放控制功能测试:在进行记录回放时选择2倍、4倍、8倍、16倍、32倍等多倍速的快放、慢放 及反方向播放,确认是否正常按照选择的方式播放;开启边记录边播放功能,确认记录是否正 常播放。播放完成后,播放刚才记录的数据,确认记录是否正确。
6.3.8.2性能试验
记录重放子系统性能试验方法如下:
a) 数据连续存储时间测试:开启记录储存功能,系统连续运行9O d后,对系统中最近9O d内记录 的数据进行随机抽取和回放,确认系统是否能正常回放9O d内所有时间段的数据信息;
b) 同步时间误差测试:对系统中不同数据源类型的记录进行同步回放1 OOO次,记录每次的同步 时间误差并计算平均,确认系统的同步时间误差是否≤5OO ms;
C)响应时间:对系统进行1 OOO次随机操作,记录系统每次的响应时间并计算平均响应时间,确 认系统的平均响应时间是否≤5OO ms。
6.3.8.3接口试验
记录重放子系统接口试验方法:由记录重放子系统向虚拟接收方分别发送记录的雷达视频信息、语 音信息、跟踪目标航迹信息、AIS信息、目标关联数据信息、VHF-DF信息、水文气象信息、报警信息、操 作记录信息等数据,然后检测所发送的数据类型和格式是否符合5.2.8.4.2和5.2.8.4.3的要求。
6.3.9信息传输与网络子系统
6.3.9.1功能试验
信息传输与网络子系统功能试验方法如下:
a) 协议传输功能测试:在该系统中安装抓包工具,每次用TCP或者UDP传递指令时,确认接收 方是否接收到相应的数据信息;
b) 通电自启动功能测试:在运行状态下切断信息传输与网络子系统设备的电源,电源恢复后,确 认子系统的设备是否能够自动启动并恢复运行状态;
C)信息传输功能测试:建立不同的虚拟局域网,在其中对数据进行传递和交换,确认数据是否被 正确的接收方成功接收。
6.3.9.2性能试验
信息传输与网络子系统性能试验方法如下:
a) 网络带宽测试:通过测试传输速度计算岀系统各子系统间传输的实际带宽,与系统设计时确定 的带宽需求进行对比,确认实际网络带宽能够保证VTS所有子系统数据传输的质量和稳定 性,并预留2O%带宽容量余量;
b) 网络传输质量测试:使用操作系统自带的网络诊断工具(Pmg)得到VTS中心服务器的网络时 延上限值、时延抖动上限值、丢包上限值以及包误差率,确认各个系统的网络时延上限值是否 ≤4OO ms、时延抖动上限值是否≤5O ms、丢包率是否≤O.1%。
6.3.10信息交换与共享子系统
6.3.10.1功能试验
信息交换与共享子系统功能试验方法:随机抽取VTS数据并将数据存入数据库,然后通过其他业 务系统对存入的数据进行调用,确认是否能够获得相应的数据信息。
6.3.10.2性能试验
信息交换与共享子系统性能试验方法如下:
a) 系统存储总容量测试:向系统中存入文件直到系统存储容量达到上限以得到系统的实际存储 容量,确认系统的实际存储容量是否符合项目实际建设需求且至少留有2O%的冗余;
b) 数据连续存储时间测试:系统连续运行9Od后,对系统中最近9O d内存入的数据进行随机抽 取和检查,确认系统是否能正常回放所抽取时间段的数据信息;
C)响应时间:对系统进行1 OOO次随机操作,记录系统每次的响应时间并计算平均响应时间,确 认系统的平均响应时间是否≤5OO ms。
6.3.10.3接口试验
信息交换与共享子系统接口试验应按照IALA V-145的规定进行。
7检验规则
7.1检验分类
检验分为岀厂检验(FAD和现场验收检验(SAT) O
7.2出厂检验(FAT)
岀厂检验的项目为6.3中VTS各子系统规定的内容,每套系统应经生产企业质量检验部门检验合 格,并附合格证后方可岀厂。
岀厂检验结果若不满足要求时应立即整改,整改后重新进行试验。
7.3现场验收检验(SAT)
现场验收检验包括单机验收检验和系统验收检验。
单机验收检验的项目为6.3中VTS各子系统规定的内容,若VTS各子系统试验结果满足要求,则 该子系统通过单机验收检验,部分检验项目可在系统验收时进行统一测试,如雷达分辨力、跟踪误差等 测试项目。
系统验收检验是在单机验收检验合格后,将所有必需的单机设备连接在一起,形成完整系统,验收 的项目主要为6.2的各项内容,若VTS系统试验结果满足要求,则该套系统通过系统验收检验。
7.4判定规则
7.4.1 劣等 VTS
劣等VTS是指岀厂检验不合格、任一子系统单机验收检验不合格、系统验收检验不合格或系统可 用性不满足基本能力等级的VTS系统。
7.4.2 基本 VTS
基本VTS是指岀厂检验、所有子系统单机验收检验、系统验收检验均合格,系统可用性满足基本能 力等级要求,但不满足标准能力等级要求的VTS系统。
7.4.3 标准 VTS
标准VTS是指岀厂检验、所有子系统单机验收检验、系统验收检验均合格,系统可用性满足标准能 力等级要求,但不满足高级能力等级要求的VTS系统。
7.4.4 优等 VTS
优等VTS是指岀厂检验、所有子系统单机验收检验、系统验收检验均合格,系统可用性满足高级能 力等级要求的VTS系统。
8标志、标签和随行文件
8.1标志
每套系统应在明显部位设置铭牌,铭牌上应有以下内容:
--系统名称;
--系统版本号;
--系统开发日期(编号);
——系统的主要参数;
--制造厂名。
8.2标签
系统设备标签上应有以下内容:
--名称、型号;
——子系统设备编号;
--制造厂名和厂址;
——执行标准号;
——包装储运图示标志应符合GB/T 191的规定。
8.3随行文件
系统包装箱内应随行附有合格证、系统软件安装盘、安装手册、使用手册,使用说明书和装箱单、软 硬件设备清单、产品质量证明文件、货物原产地证明文件、材质证明文件。此外,涉及无线电发射设备的 系统(雷达、AIS、VHF等)还应提供由国家无线电监测中心核发的《无线电发射设备型号核准证》。
9包装、运输和贮存
9.1包装
系统内包装用泡沫塑料,外包装采用木箱包装。
9.2运输
系统可用一般交通工具运输,在运输过程中应避免日晒雨淋和剧烈碰撞。
9.3贮存
系统应贮存在通风、干燥、通风并远离热源的室内场所。
附录A
(资料性附录) 系统设备编码范例
A.1已定义设备类型编码范例
以江苏省南京海事局VTS中心大桥雷达站的雷达收发机为例,其设备代码为32010601051120000001, 其中:
a) 32010601:中心编码:
——32:省级编号,江苏省;
--01 :市级编号,南京市;
---06 :区级编号,鼓楼区;
--01:基层接入单位编号,南京海事局。
b) 05:用户自定义编码,大桥雷达站。
C) 112:类型编码,雷达收发机。
d) 0000001:序号。
A.2未定义设备类型编码范例 S
以江苏省南京海事局VTS中心大桥雷达站的波导充气机为例,由于在表2中未规定该设备的类型 编码,则其类型编码采用扩展的类型编码,例如将其设备代码设置为32010601051200000001,其中:
a) 32010601:中心编码:
--32:省级编号,江苏省;
--01 :市级编号,南京市;
---06 :区级编号,鼓楼区;
--01:基层接入单位编号,南京海事局。
b) 05:用户自定义编码,大桥雷达站。
C) 120:类型编码,波导充气机(扩展编码)。
d) 0000001:序号。
附录B
(规范性附录) 雷达数据格式要求
B.1雷达数据报文结构
雷达数据主要包括三大类,即雷达状态/控制数据、雷达目标航迹数据和雷达视频数据,数据报文结 构如图B.1所示:
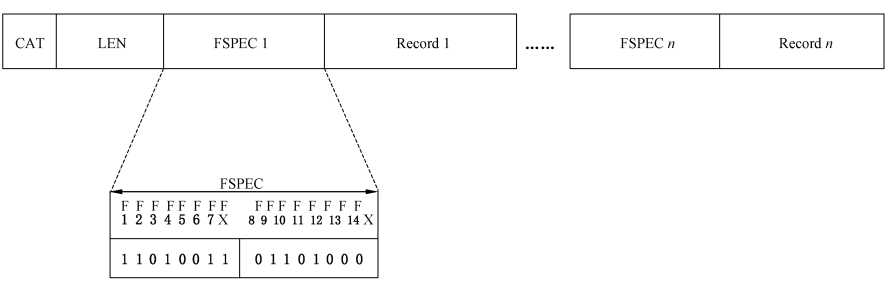
图B.1数据报文结构示意
CAT:单字节数据,说明后续数据属于哪个类别,253代表雷达状态/控制数据;010代表雷达目标 航迹数据;240代表雷达视频数据。
LEN:2个字节,说明了本数据块的长度。
FSPEC:对UAP的描述,它告诉了我们随后的记录中将是一些什么数据项。FSPEC中各位的0 或1,就是对UAP中的选项进行选择。FSPEC的每一位对应UAP中的一个数据项,0表示不选,1表 示选取,在FSPEC后面的字节依次为这些数据项。每种雷达数据类型有自己的UAPO UAP其实是标 准数据项的子集o UAP中除了数据项的内容外,还规定了每个项的字长o FSPEC犹如一个索引o在 每个字节的第8位是一个称为FX的标志,如果为1,则扩展一个字节o如果为。,则FSPEC结束o
Record:实际数据。
B.2雷达数据定义
B.2.1雷达状态/控制数据
B.2.1.1 UAP 表
雷达状态/控制数据的UAP如表B.1所示。
表B. 1 UAP表
|
字段编号 |
数据项 |
描述 |
类型 |
长度/字节 |
|
1 |
I253/010 |
数据源唯一标识符 |
固定长度 |
2 |
|
2 |
I253/015 |
数据源本地标识符 |
固定长度 |
1 |
|
3 |
I253/020 |
数据目的地唯一标识符 |
倍数长度一 |
1 + 2×n |
|
4 |
I253/025 |
数据目的地本地标识符 |
倍数长度 |
1 + 3×n |
|
5 |
I253/040 |
消息类型 |
固定长度 |
1 |
|
6 |
I253/050 |
消息序列号 |
倍数长度一 |
1 + 2×n |
|
7 |
I253/070 |
当日时间 |
固定长度 |
3 |
|
FX |
一 |
字段扩展指示符 |
— |
— |
|
8 |
I253/060 |
数据块信息 — |
固定长度 |
2 |
|
9 |
I253/080 |
数据结构 一 |
复合式数据字故 |
4 +狀 |
|
10 |
I253/090 |
_____数据内容_____ |
倍数长度 |
1 + 16× 狀 |
|
11 |
I253/120 |
雷达位置 |
固定长度 |
12 |
|
12 |
I253/SP |
______⅜≡______ |
指定长度一 |
1 +狀 |
|
FX |
— |
字段扩展指示符 |
— |
— |
B.2.1.2数据项定义
B.2.1.2.1数据项1253/010,数据源唯一标识符
定义:识别数据来源于哪个系统,默认置0,表示本地。
类型:2个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
SAC= 00 |
SIC | ||||||||||||||
bιts-16∕9(SAC):系统区域码;
bks-8/1(SIC):系统识别码。
注:系统区域码(SAC)详见B.3.1,系统识别码(SIC)详见B.3.2。
B.2.1.2.2数据项1253/015,数据源本地标识符
定义:数据源本地标识符,可用于标识本地雷达ID0 类型:1个字节固定长度数据字段。
结构:
OCtetno.1
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
LocalID | |||||||
bιts8∕1 (Local ID):数据源本地 ID。
34
B.2.1.2.3数据项1253/020,数据目的地唯一标识符
定义:识别数据发布到哪些系统。
类型:倍数长度数据字段。
结构:
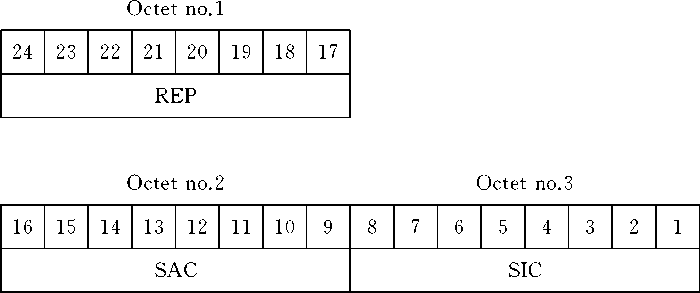
bιts-16∕9(REP):系统区域码/识别码总数;
bhs-16∕9<SAC):系统区域码;
bts-8/KSIC):系统识别码。
B.2.1.2.4数据项1253/025,数据目的地本地标识符
定义:识别数据发布到哪些系统本地标识符。
类型:倍数长度数据字段。
结构:
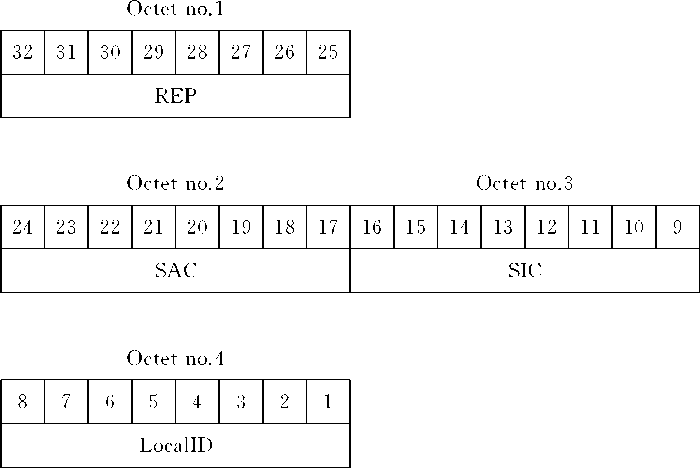
bits-32/25 (REP):目的地标识符总数; bts-24∕17(SAC):系统区域码;
bts-16∕9(SIC):系统识别码;
bts-8∕1 (LocalID):本地 ID0

B.2.1.2.5数据项1253/040,消息类型
定义:消息类型。
类型:1个字节固定长度数据字段O
结构:
OCtet no.4
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
PI |
D |
MeSSage TyPe Identifier | |||||
bit-8(Pl):优先级(0 :低优先级;1 :高优先级);
bιt-7(D):交付状态(0:不需要强制收到确认;1:需要强制收到确认);
bit-6/1 (Message TyPeldent IfIer):消息类型编码:1:时间;2:连接请求;3 :连接请求响应;4 :释放连 接;5:请求取得控制权;6:放弃控制权;7:授权控制权;8:控制信息;9:传输信息完成状态;10:传输信息 延迟状态;11 :传输请求信息完成状态;12 :中心交换信息;13:中心状态信息;14 :中心传输信息;15 :中心 同步请求信息;16:雷达监控启动信息;17:雷达监控停止信息;18:确认信息;19:错误信息;20 :警告信 息;21:心跳信息O
B.2.1.2.6数据项1253/050,消息序列号
定义:代表连续递增信息的顺序编号。
类型:倍数长度数据字段。
结构:
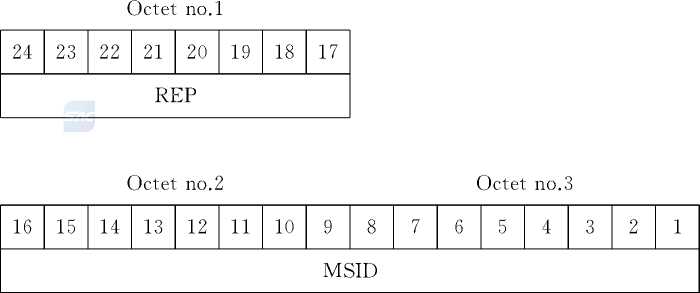
bks-24∕17(REP):消息总数;
bits-16/1 (MSID):消息序列号。
注1:该消息序列号主要被用到请求相对应的回应或者确认上,它解决重要的请求不同步的问题。例如一个消息 发布者同时发布N个需要相应消息。
注2:该消息序列号可以解决网络传输无顺序的问题。
B.2.1.2.7数据项1253/060,数据块信息
定义:数据块信息包含一个大的数据信息中所包含的数据块总数以及当前数据块的索引。
类型:2个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
TNB |
BN | ||||||||||||||
bιts-16∕9(TNB):数据块总数;
bits - 8/1 (BN):队列中当前数据块的索引。
注:数据块信息用在底层网络不允许发送任意长度CAT253消息的应用程序,用于支持消息的组包与分包O
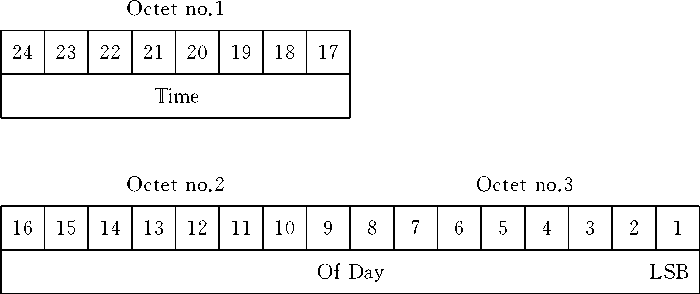
B.2.1.2.8数据项1253/070,当日时间
定义:以UTC表示的绝对时间戳。
类型:3个字节固定长度数据字段。
结构:
OCtetno.1

|
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
|
Time | |||||||
bit-16∕1(Time of Day):单位 1/128 So
B.2.1.2.9数据项1253/080,数据结构
定义:针对1253/090数据内容的结构描述。
类型:复合式数据字段:是由3个字节固定长度数据+ 1个扩展长度数据字段组成。
结构:

OCtetno.3
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
|
COUNT | |||||||
OCtet no.4
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
STATUS |
FX | ||||||
bιts-32∕3KSTART INDEX):消息识别码,便于订阅者与发布者之间识别;
bhs-16∕9(COUNT):状态总数;
bits - 8/1 (STATUS):状态信息:bt8(0:非失效信息;1:失效信息);bit7(0:真实数据;1:模拟数据); bit6(0:远程控制下的监视对象;1:本地控制下的监视对象);bit5(0 :不包含数据内容;1:包含数据内 容);bit42保留字段;bt1(0:结束符;1:扩展标识符)。
消息识别码见表B2。
表B.2消息识别码
|
来源地 |
目的地 |
消息名称 |
消息识别码 |
状态总数 |
|
应用系统 |
雷达子系统 |
屏蔽区 |
2001 |
1 |
|
应用系统 |
雷达子系统 |
人工跟踪初始化 |
2002 |
1 |
|
应用系统 |
雷达子系统 |
人工跟踪删除 |
2003 |
1 |
|
应用系统 |
雷达子系统 |
跟踪设置 |
2004 |
1 |
|
应用系统 |
雷达子系统 |
请求跟踪状态 |
2005 |
1 |
|
应用系统 |
雷达子系统 |
设置主收发机 |
3001 |
1 |
|
应用系统 |
雷达子系统 |
设置传输状态 |
3002 |
1 |
|
应用系统 |
雷达子系统 |
设置PRF |
3003 |
1 |
|
应用系统 |
雷达子系统 |
设置主电源 |
3004 |
1 |
|
应用系统 |
雷达子系统 |
请求雷达状态 |
3005 |
1 |
|
雷达子系统 |
应用系统 |
已更新屏蔽区 |
2201 |
1 |
|
雷达子系统 |
应用系统 |
已更新跟踪设置 |
2204 |
1 |
|
雷达子系统 |
应用系统 |
已更新收发机状态 |
3301 |
1 |
|
雷达子系统 |
应用系统 |
已更新传输状态 |
3302 |
1 |
|
雷达子系统 |
应用系统 |
已更新PRF |
3303 |
1 |
|
雷达子系统 |
应用系统 |
心跳信息 |
1001 |
1 |
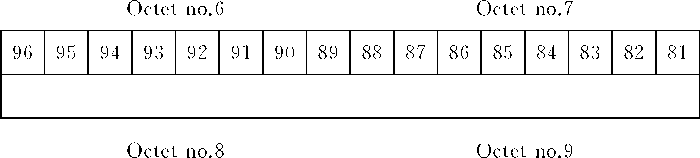
B.2.1.2.10数据项1253/090,数据内容
定义:由I253/080数据结构所定义的数据内容。
类型:2个字节固定长度数据字段。
结构:倍数长度数据字段。
OCtet no.1
|
136 |
135 |
134 |
133 |
132 |
131 |
130 |
129 | |
|
REF | ||||||||
|
OCtetno.2 |
OCtetno.3 | |||||||
|
128 |
127 |
126 |
125 |
124 |
123 |
122 |
121 |
120 119 118 117 116 115 114 113 |
OCtet no.4 OCtet no.5
|
112 |
111 |
110 |
109 |
108 |
107 |
106 |
105 |
104 |
103 |
102 |
101 |
100 |
99 |
98 |
97 |
|
80 |
79 |
78 |
77 |
76 |
75 |
74 |
73 |
72 |
71 |
70 |
69 |
68 |
67 |
66 |
65 |
OCtet no.10 OCtet no. 11
|
64 |
63 |
62 |
61 |
60 |
59 |
58 |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
49 |
OCtetno.12 OCtetno.13
|
48 |
47 |
46 |
45 |
44 |
43 |
42 |
41 |
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 |
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
LSB | |||||||||||||||
bιts-136∕129(REP):数据块总数;
bts-128/1(LSB):每块包含128比特位存储数据内容。
可包含的数据内容如下:
a)屏蔽区:
1) 此消息用于设置或删除屏蔽区域;
2) 每个区域由多达40个顶点的多边形定义;
3) 如果雷达子系统成功执行了屏蔽区命令,它将回复已更新屏蔽区消息;
4) 不成功的执行将导致雷达子系统回应为负数确认;
5) 如果雷达子系统收到新的屏蔽区域,其ID与现有区域一致,雷达子系统将用最新的替代 现有的区域。
表B.3显示了屏蔽区的应用数据结构:
表B.3屏蔽区数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0〜255块 |
|
2.应用数据块 | |||
|
2.1屏蔽区头 | |||
|
数据长度 |
屏蔽区的长度 |
4 |
顶点个数 |
|
类型 |
屏蔽区类型 |
1 |
类型码,自定义范围0〜255 |
|
唯一识别码 |
屏蔽区唯一识别码 |
1 |
范围0〜255 |
|
动作 |
屏蔽区执行动作 |
1 |
0 =增加或更新;1 =删除 |
|
顶点号 |
第几个顶点 |
1 |
最大40个顶点 |
|
分隔符 |
分隔符 |
8 |
置零 |
|
2.2屏蔽区标签(删除操作不需要此选项) | |||
|
屏蔽区标签 |
屏蔽区标签 |
16 |
ASCH码,剩余字节填充“@”字符 |
|
2.3屏蔽区顶点,重复犿次(删除操作不需要此选项) | |||
|
LAT |
纬度 |
4 |
WGS-84坐标系统 |
|
分隔符 |
分隔符 |
4 |
置零 |
|
LONG |
经度 |
4 |
WGS-84坐标系统 |
|
分隔符 |
分隔符 |
4 |
置零 |
b)人工跟踪初始化:
1) 此消息允许人工初始化雷达航迹;
2) 系统将初始化给定位置的航迹;
3) 如果航迹与对应的雷达信号不匹配,雷达将初始化在航迹丢失状态下的航迹;
4) 每个消息只能初始化1个航迹。
表B.4显示了人工跟踪初始化的应用数据结构。
表B.4人工跟踪初始化数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0〜255块 |
|
2.应用数据块 | |||
|
2.1航迹位置 | |||
|
LAT |
纬度 |
4 |
WGS-84坐标系统 |
|
分隔符 |
分隔符 |
4 |
置零 |
|
LONG |
经度 |
4 |
WGS-84坐标系统 |
|
分隔符 |
分隔符 |
4 |
置零 |
C)人工跟踪删除:
此消息允许网关发送停止/终止单个航迹的报告请求。
表B.5显示了人工跟踪删除应用数据结构。
表B.5人工跟踪删除数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块 | |||
|
2.1航迹唯一号 | |||
|
航迹唯一号 |
被删除目标航迹唯一号 |
4 |
航迹号 |
|
分隔符 |
分隔符 |
12 |
置零 |
d)跟踪设置:
1) 此消息用于远程编辑雷达子系统设置;
2) 如果雷达子系统成功执行该命令,它将更新雷达子系统的相关参数;
3) 不成功的执行将导致雷达子系统回应为负数确认。
表B.6显示了跟踪设置的应用数据结构。
表B.6跟踪设置数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块 | |||
|
杂波扫描 |
声明杂波目标或者静止目标扫描次数 |
1 |
0-255 |
|
TBD SCOre |
初始化航迹的灵敏度。较高的值表明对 检测较弱的目标更为敏感,而提高更多 的虚假目标警报 |
1 |
灵敏度:0-255 |
|
TBD PD |
设置强信号扫描次数来提高探测几率 |
1 |
0-255 |
|
最小速度 |
探测目标要求的最小速度 |
1 |
单位为0.1 m/s |
|
关联阈值 |
决定关联正常航迹数据阈值。值越低代表 对弱目标越敏感,但以虚假警报为代价 |
1 |
范围0-255 |
|
最小加速度 |
探测目标要求的最小加速度 |
2 |
单位为0.01 m∕s2 |
|
分隔符 |
分隔符 |
8 |
置零 |
e)请求跟踪状态:
1) 此消息用于请求跟踪状态;
2) 雷达子系统回复以下信息:
•已更新所有的屏蔽区;
41
•已更新跟踪设置。
请求跟踪状态不需要应用数据结构。
f)设置主收发机:
1) 此消息由网关发送请求,以选择在双雷达系统中有效的雷达单元;
2) 如果雷达子系统成功执行该命令,它将回复已更新传输状态;
3) 不成功的执行将导致雷达子系统回应为负数确认。
表B.7显示了设置主收发机的应用数据结构。
表B.7设置主收发机数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块 | |||
|
激活主收发机 |
激活模式切换雷达单元 |
2 |
O =收发机1;1 =收发机2; 其他=无意义 |
|
分隔符 |
分隔符 |
14 |
置零 |
S)设置传输状态:
1)此消息应由网关发送请求雷达子系统传输开启或关闭;
S 2)如果雷达子系统成功执行了该命令,它将回复已更新传输状态;
3)不成功的执行将导致雷达子系统回应为负数确认。
表B.8显示了设置传输状态的应用数据结构。
表B.8设置传输状态数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0〜255块 |
|
2.应用数据块 | |||
|
传输状态 |
设置传输状态 |
2 |
0=关;1=开;其他=无意义 |
|
分隔符 |
分隔符 |
14 |
置零 |
h)设置PRF :
1) 此消息用于PRF设置;
2) 如果雷达子系统成功执行了该命令,它将回复已更新PRF消息;
3) 不成功的执行将导致雷达子系统回应为负数确认。
表B.9显示了设置PRF的应用数据结构。
表B.9设置PRF的数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
O〜255块 |
|
2.应用数据块 | |||
|
PRF |
设置PRF |
2 |
O =极短;1 =短;2 =中;3 =长; 4 =极长;其他,无意义 |
|
分隔符 |
分隔符 |
14 |
置零 |
I)设置主电源:
此消息用于启动或关闭电源。
表B.1O显示了设置主电源应用数据结构。
表B.10设置主电源的数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
O〜255块 |
|
2.应用数据块 | |||
|
主电源 |
启动或关闭电源 |
2 |
O =关;1 =开;其他=无意义 |
|
分隔符 |
分隔符 |
14 |
置零 |
j) 请求雷达状态:
1) 此消息请求雷达状态;
2) 雷达子系统回复以下信息:
•已更新收发机状态;
•已更新传输状态;
•已更新PRFO
请求雷达状态不需要应用数据结构。
k) 已更新屏蔽区:
1) 此消息用于雷达子系统发送屏蔽区域状态到网关;
2) 如果雷达子系统更新设置或删除屏蔽区域,它将回复已更新屏蔽区消息;
3) 如果设置所有屏蔽区与雷达子系统屏蔽区一致,它将回复请求跟踪状态消息。 表B.11显示了已更新屏蔽区的应用数据结构。
表B. 11已更新屏蔽区的数据结构
|
数据元素 |
描述 |
大小/字节 |
_______⅜⅛_______ |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块___________________________________________________________ | |||
|
2.1屏蔽区头 | |||
|
数据长度 |
____屏蔽区的长度____ |
4 |
______顶点个数______ |
|
类型 |
屏蔽区类型 |
1 |
类型码,自定义,范围0〜255 |
|
唯一识别码 |
屏蔽区唯一识别码 |
1 |
范围0〜255 |
|
动作 |
屏蔽区执行动作 |
1 |
0 =增加或更新;1 =删除 |
|
顶点号 |
第几个顶点 |
1 |
最大40个顶点 |
|
分隔符 |
分隔符 一 |
8 |
置零 |
|
2.2屏蔽区标签(删除操作不需要此选项) | |||
|
屏蔽区标签 |
屏蔽区标签 |
16 |
ASell码,剩余字节填充“@”字符 |
|
2.3屏蔽区顶点,重复犿次(删除操作不需要此选项) | |||
|
LAT |
4 |
WGS-84坐标系统 | |
|
分隔符 |
__ 分隔符 一 |
4 |
置零 |
|
LONG |
经度 |
4 |
WGS-84坐标系统 |
|
分隔符 |
分隔符 一 |
4 |
__ |
1)已更新跟踪设置: 霸
雷达子系统回复以下信息:
1) 跟踪设置;
2) 请求跟踪状态。
表B.12显示了已更新跟踪设置的应用数据结构O
表B.12已更新跟踪设置的数据结构
|
数据元素 |
描述 |
大小/字节 |
_____⅜⅛_____ |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块 | |||
|
杂波扫描 |
声明杂波目标或者静止目标扫描次数 |
1 |
0-255 |
|
TBD SCOre |
-初始化航迹的灵敏度O较高的值表明-对检测较弱的目标更为敏感,而提高 _____更多的虚假目标警报_____ |
1 |
灵敏度:0〜255 |
|
TBD PD |
设置强信号扫描次数来提高探测几率 |
1 |
0-255 |
|
最小速度 |
探测目标要求的最小速度 |
1 |
单位为0.1 m∕s |
|
关联阈值 |
决定关联正常航迹数据阈值,值越低代表 对弱目标越敏感,但以虚假警报为代价 |
1 |
范围0〜255 |
|
最小加速度 |
探测目标要求的最小加速度 |
2 |
单位为0.01 m∕s2 |
|
分隔符 |
分隔符 |
8 |
置零 |
m)已更新收发机状态:
雷达子系统回复以下信息:
1) 请求雷达状态;
2) 设置主收发机。
表B.13显示了已更新收发机状态的应用数据结构。
表B.13已更新收发机状态的数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块 | |||
|
激活主收发机 |
激活模式切换雷达单元 |
2 |
O =收发机1;1 =收发机2;其他=无效 |
|
发起者 |
命令发起者 |
2 |
SAC 和 SlC |
|
分隔符 |
分隔符 |
12 |
置零 |
n)已更新传输状态:
雷达子系统回复以下信息:
1) 请求雷达状态;
2) 设置传输状态。
表B.14显示了已更新传输状态的应用数据结构O
表B.14已更新传输状态的数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0-255 块 |
|
2.应用数据块 | |||
|
传输状态 |
设置传输状态 |
2 |
0 =关;1 =开;其他=无意义 |
|
发起者 |
命令发起者 |
2 |
SAC 和 SlC |
|
分隔符 |
分隔符 |
12 |
置零 |
。)已更新PRF
雷达子系统回复以下信息:
1) 请求雷达状态;
2) 设置PRFO
表B.15显示了已更新PRF的应用数据结构。
表B.15已更新PRF的数据结构
|
数据元素 |
描述 |
大小/字节 |
备注 |
|
1. REP | |||
|
块数 |
应用数据块的数量 |
1 |
0〜255块 |
|
2.应用数据块 | |||
|
PRF |
设置PRF |
2 |
0 =极短;1 =短;2 =中;3 =长; 4 =极长;其他,无意义 |
|
发起者 |
命令发起者 |
2 |
SAC 和 SlC |
|
分隔符 |
分隔符 |
14 |
置零 |
P)心跳信息:
此消息用于雷达发送系统有效性信息给网关,每20 S发送一次。
心跳信息不需要应用数据结构。
B.2.1.2.11数据项1253/120,雷达位置
定义:以经度、纬度和高度表示的雷达位置。
类型:8个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
64 |
63 |
62 |
61 |
60 |
59 |
58 |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
49 |
|
Heght in WGS-84 LSB | |||||||||||||||
OCtet no. 3 OCtet no.4
|
48 |
47 |
46 |
45 |
44 |
43 |
42 |
41 |
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 |
|
LattUde in WGS-84 | |||||||||||||||
OCtet no. 5 OCtet no.6
|
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
|
LSB | |||||||||||||||
|
OCtetno.7 OCtetno.8 | |||||||||||||||
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
LOngItUde in WGS84 LSB
bιts64∕49(Heιght in WGS84):高度,WGS84 坐标系下的雷达高度,(LSB)单位:1 m;
bits-48/25 (Latitude m WGS84):纬度,WGS84 坐标系的二进制补码,范围:—90。〜90°, (LSB)单 位:180°/2 23 ;
bits-24/1 (Longitude n WGS-84):经度,WGS84 坐标系的二进制补码,范围:一180° 〜180°, (LSB)单位0。/2 23。
46 —
B.2.2雷达目标航迹数据格式
B.2.2.1 UAP 表
雷达目标航迹数据的UAP见表B.16o
表B.16雷达目标航迹数据的UAP
|
字段编号 |
数据项 |
描述 |
类型 |
长度/字节 |
|
1 |
1010/010 |
数据源唯一标识符 |
固定长度 |
2 |
|
2 |
1010/000 |
消息类型 |
固定长度 |
1 |
|
3 |
1010/020 |
目标报告描述 |
扩展长度 |
1 +九 |
|
4 |
1010/140 |
当日时间 |
固定长度 |
3 |
|
5 |
1010/041 |
WGS-84坐标位置 |
固定长度 |
8 |
|
6 |
1010/040 |
极坐标测量位置 |
固定长度 |
4 |
|
7 |
1010/042 |
笛卡尔坐标位置 |
固定长度 |
4 |
|
FX |
— |
字段扩展指示符 |
— |
— |
|
8 |
1010/200 |
极坐标航迹速度 |
固定长度 |
4 |
|
9 |
1010/202 |
笛卡尔坐标航迹速度 |
固定长度 |
4 |
|
10 |
1010/161 |
航迹号 |
固定长度 |
2 |
|
11 |
1010/170 |
航迹状态 |
扩展长度 |
1 + ^ |
|
12 |
1010/091 |
测量高度 |
固定长度 |
2 |
|
13 |
1010/220 |
目标地址 |
固定长度 |
3 |
|
14 |
1010/245 |
目标识别指示器 |
固定长度 |
7 |
|
FX |
— |
字段扩展指示符 |
— |
— |
|
15 |
1010/500 |
位置误差标准差 |
固定长度 |
4 |
|
16 |
1010/131 |
信号强度 |
固定长度 |
1 |
|
17 |
1010/210 |
目标加速度 |
固定长度 |
2 |
|
18 |
I010/SP |
专用 |
指定长度 |
1 + ^ |
|
19 |
I010/RE |
保留 |
指定长度 |
1 + ^ |
|
FX |
— |
字段扩展指示符 |
— |
— |
B.2.2.2数据项定义
B.2.2.2.1数据项1010/000,消息类型
定义:便于区分消息不同类别。
类型:1个字节固定长度数据字段。
结构:
OCtet no.l
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
MESSAGE TYPE | |||||||
bιts-8(MESSAGE TYPE):消息类型,见表 B.l70
注1:不同类别放置相应的字段项。
注2:类别定义如下:1目标报告;2更新周期开始;3定期状态消息;4事件触发状态消息。
表B.17各个消息类型数据项
|
数据项参考号 |
描述 |
001 目标报告 |
002 更新周期 开始 |
003 定期状态 消息 |
004 事件触发 状态消息 |
|
I010/000 |
消息类型 |
M |
M |
M |
M |
|
I010/010 |
数据源唯一标识符 |
M |
M |
M |
M |
|
I010/040 |
极坐标测量位置 |
O |
X |
X |
X |
|
I010/041 |
WGS-84坐标位置 |
O |
X |
X |
X |
|
1010/042 |
笛卡尔坐标位置 |
O |
X |
X |
X |
|
1010/091 |
测量高度 |
O |
X |
X |
X |
|
1010/131 |
振荡波幅度 |
O |
X |
X |
X |
|
1010/140 |
当日时间 |
M |
M |
M |
M |
|
1010/161 |
航迹号 |
O |
X |
X |
X |
|
1010/170 |
航迹状态 |
O |
X |
X |
X |
|
1010/200 |
极坐标航迹速度 |
O |
X |
X |
X |
|
1010/202 |
笛卡尔坐标航迹速度 |
O |
X |
X |
X |
|
1010/210 |
计算目标加速度 |
O |
X |
X |
X |
|
1010/500 |
位置误差标准差 |
O |
X |
X |
X |
|
注:M代表必选项;O代表可选项;X代表不可用选项。 | |||||
B.2.2.2.2数据项010/010,数据源唯一标识符
定义:识别数据来源于哪个系统。
类型:2个字节固定长度。
结构:
OCtet no. l OCtet no.2
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
SAC=00 |
SIC | ||||||||||||||
bits16/9(SAC):系统区域码;
bits-8/1 (SIC):系统识别码O
注:SAC全部填零表示是本地区域数据o
B.2.2.2.3数据项1010/020,目标报告描述
定义:描述目标类型与数据特征O
类型:1个字节扩展长度。
结构:
OCtet no.1
|
8 |
7 |
6 |
5 |
|
TYP |
DCR | ||
|
4 |
3 |
2 |
1 |
|
CHN |
GBS |
CRT |
FX |

80 79 78 77 76 75 74 73 72 71 70 69 68 67 66 65
bιts-8∕6(TYP):目标类型,000:SSR多点定位;001: S模式下多点定位;010:广播式自动相关监视
系统;011:制定规范性;100:磁回路系统;101:广域多点定位;110:不定义;111:其他类;
bits - 5(DCR):差分校正,0:无差别校正;1:有差别校正;
bits-4(CHN):链路,0:链路 1;1:链路 2;
bts-3(GBS):应答器接地设置,0:应答器字节不设置;1:应答器字节设置;
bts2(CRT):多点定位错误应答,0:在多点定位中无错误回应;1:在多点定位中有错误回应;
bits1(FX):字段扩展指示符,0:结束数据块;1:扩展数据块。
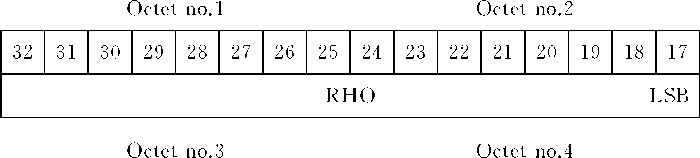
B.2.2.2.4数据项1010/040,极坐标测量位置
定义:目标在本地极坐标系中的测量位置O
类型:4个字节固定长度数据字段。
结构:
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
THETA LSB | |||||||||||||||
bts-32∕17(RHO):距离,单位:1 m,最大值 65 535 m(≈35.4 nm); bits-16/1 (THETA):方位,单位:360°/218 (≈0.005 5°)。
B.2.2.2.5 数据项 1010/041,WGS-84 坐标位置
定义:目标在WGS-84坐标系中的位置。
类型:8个字节固定长度数据字段。
结构:
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
LSB | |||||||||||||||


16 15 14 13 12 11 IO 9 8 7 6 5 4 3 2 1
bιts-64∕33 ( LatItUde In WGS-84:纬度,WGS-84 坐标系的二进制补码,范围:一9O° 〜90°,单位: 180°∕231;
bits-32/1 (LongltUde n WGS-84:经度,WGS-84 坐标系的二进制补码,范围:一180。〜180°,单位: 180°/231。
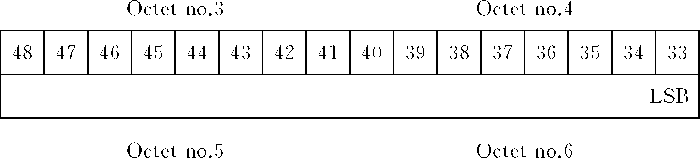
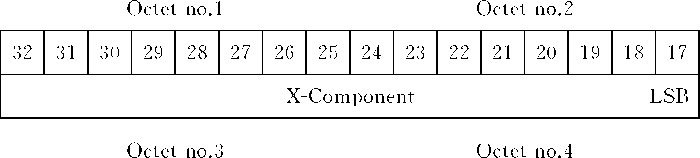
B.2.2.2.6数据项1010/042,笛卡尔坐标位置
定义:目标在笛卡尔坐标系中的位置。
类型:4个字节固定长度数据字段。
结构:
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
Y-COmPOnent LSB | |||||||||||||||
bks-32∕17(X-Component) : X 坐标,单位:1 m,范围:一32 768 m-- 32 768 m;
bits-16/1 (Y-Component) :Y 坐标,单位:1 m,范围:一32 768 m-- 32 768 m。
B.2.2.2.7数据项1010/091,测量高度
定义:二维参考坐标系下的目标高度,是基于直接测量得岀,不涉及压强。
类型:2个字节固定长度数据字段。
结构:

bits-16∕l(MeaSUred Height):测量高度,单位:O.l m,范围:一32 768 m-- 32 768 m0
B.2.2.2.8数据项1010/131,信号强度
定义:信号强度。
类型:1个字节固定长度数据字段。
结构:
OCtet no.l
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
PAM | |||||||
bιts8∕1 (PAM):参数,范围<O-255)0
B.2.2.2.9数据项1010/140,当日时间
定义:以UTC表示的绝对时间戳。
类型:3个字节固定长度数据字段。
结构:
bit-16∕1(Time of Day):航迹时间,单位:1/128 So
B.2.2.2.10 数据项 1010/161,航迹号
定义:在特定的航迹文件里以一整数值代表某单一的航迹记录。
类型:8个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
16 |
15 |
14 |
13 |
12 |
11 |
1O |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
O |
O |
O |
O |
TRACK NUMBER(O...4O95) LSB | |||||||||||
bits-16/13:预留位,默认置O;
bits-12/1 (TRACK NUMBER):航迹号。
B.2.2.2.11数据项1010/170,航迹状态
定义:单雷达航迹的状态。
类型:扩展长度数据字段。
结构:
OCtet no.l
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
CNF |
TRE |
CST |
MAH |
TCC |
STH |
FX | |
bit-8(CNF):航迹类型,0:确认的航迹;1:初始状态的航迹;
bit-7(TRE):0:不是一个航迹的最后报告;1: 一个航迹的最后报告;
bks-6/5(CST): K推状态,00:没有预推;01:在感知设备刷新周期中预推;10:在遮蔽区中预推;11: 在盲区中预推;
bit4(MAH):水平操作,0:缺省(无);1:水平操作;
bιt3(TCC):倾斜距离,0:原始倾斜距离;1:采用了适合的投影技术做了倾斜距离修正;
bιt2(STH):位置信息0 :测量岀的位置;1 :平滑插值的位置;
bit1(FX):字段扩展指示符,0:结束符,1:扩展标识符;
OCtetno.1
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
TOM |
DOU |
MRS |
FX | ||||
bks-8/7(TOM):运动类型,00:未定义运动类型;01:加速;10,转向;
bks-6/4(DOU):可疑关联,000:非可疑;001:可疑(未确定);010:混乱导致可疑;011:丢失准确性 导致可疑;100:混乱准确性导致可疑;101:不稳定航迹导致可疑;110:与预计测算不符导致可疑;
bits - 3/2 (MRS):合并或分割,00:合并或分割未确定迹象;01:合并存在关联的点迹;10:合并不存 在关联的点迹;11:分割痕迹;
bt1(FX):字段扩展指示符,0:结束符;1:扩展标识符;
OCtetno.1
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
GHO |
0 |
0 |
0 |
0 |
0 |
0 |
FX |
bit-8(GHO):幽灵航迹,0:真航迹;1:假航迹;
bits-7/2:暂时不用,置零;
bit-1(FX):字段扩展指示符,0:结束符;1:扩展标识符O
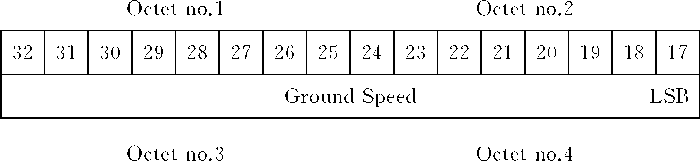
B.2.2.2.12数据项1010/200,极坐标航迹速度
定义:在极坐标系中表示航迹的速度。
类型:4个字节固定长度数据字段。
结构:
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
TraCk AngIe LSB | |||||||||||||||
bits-32∕17(GroUnd SPeed):对地速度,单位:2 14 nm∕s(≈0.22 kn),最大值 2 nm/s; bits-16/1 (Track AngIe):跟踪角度,单位:360°∕210
B.2.2.2.13数据项1010/202,笛卡尔坐标航迹速度
定义:在笛卡尔坐标系中表示航迹的速度。
类型:4个字节固定长度数据字段。
结构:
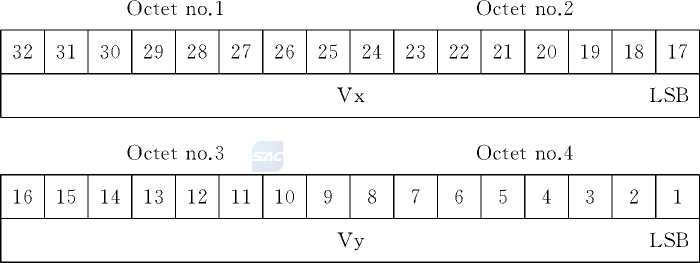
bits-32&17(Vx):X 轴速度,单位:0.25 m/s,范围:一8 192 m/s 8 192 m/s; bits16&1(Vy):Y 轴速度,单位:0.25 m/s,范围:一8 192 m/s- + 8 192 m/s。
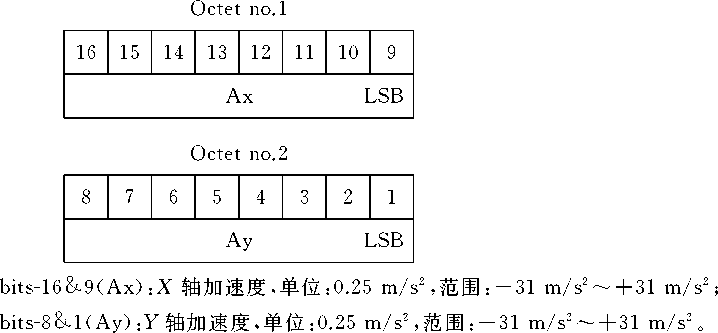
B.2.2.2.14数据项1010/210,目标加速度
定义:目标加速度。
类型:2个字节固定长度数据字段。
结构:
B.2.2.2.15数据项1010/220,目标地址
定义:对于每个目标的唯一地址。
类型:3个字节固定长度数据字段O 结构:
OCtet no.l
|
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 | |
|
Target | ||||||||
|
OCtet no.2 |
OCtetno.3 | |||||||
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 7 6 5 4 3 2 1 |
AddreSS
bits-24∕l<Target AddreSS):目标地址 O
B.2.2.2.16数据项1010/245,目标识别指示器
定义:8个字符表示的目标识别符。
类型:7个字节固定长度数据字段。
结构:
OCtetno.l
|
56 |
55 |
54 |
53 |
52 |
51 |
50 |
49 |
|
STI |
0 |
0 |
0 |
0 |
0 |
0 | |
OCtet no.2 OCtet no.3
|
48 |
47 |
46 |
45 |
44 |
43 |
42 |
41 |
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 |
|
MSB CharaCterI |
CharaCter2 |
CharaCter3 | |||||||||||||
OCtet no.4 OCtet no.5
|
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
|
CharaCter4 |
CharaCter5 | ||||||||||||||
OCtet no. 3 OCtet no.4
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
CharaCter6 |
CharaCter7 |
CharaCter8 LSB | |||||||||||||
bks-56∕55<STI):目标识别类型,00:从应答器中下行的呼号与认证;01:没有从应答器中下行的呼 号;10:没有从应答器中下行的认证;
bits-54/49:空位置 0;
bits48/1:8 个字符 o
B.2.2.2.17数据项1010/500,位置误差标准差
定义:位置误差标准差。
类型:4个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
|
σχ LSB |
σy LSB | ||||||||||||||
|
OCtet no. 3 OCtet no.4 | |||||||||||||||
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
σxy LSB
bits-32∕25(σx) :X 轴标准差,单位:0.25 m;
bts-24∕17(σy) :Y 轴标准差,单位:0.25 m;
bits16∕1(σxy) :2 轴平方方差,单位:0.25 m2 O
B.2.3雷达视频数据格式
B.2.3.1 UAP 表
雷达视频数据的UAP见表B.18o
表B.18雷达视频数据的UAP表
|
字段编号 |
数据项 |
描述 |
类型 |
长度/字节 |
|
1 |
1240/010 |
数据源唯一标识符 |
固定长度 |
2 |
|
2 |
1240/000 |
消息类型 |
固定长度 |
1 |
|
3 |
1240/020 |
视频记录头信息 |
固定长度 |
4 |
|
4 |
1240/030 |
视频摘要 |
倍数长度 |
1 +九 |
|
5 |
1240/040 |
视频头信息(纳秒单位) |
固定长度 |
12 |
|
6 |
1240/041 |
视频头信息(飞秒单位) |
固定长度 |
12 |
|
7 |
1240/048 |
视频分辨率及数据压缩 |
固定长度 |
2 |
|
FX |
— |
字段扩展指示符 |
— |
— |
|
8 |
240/049 |
视频 |
固定长度 |
5 |
|
9 |
240/050 |
低容积视频块 |
倍数长度 |
1 + 4×n |
|
10 |
240/051 |
中容积视频块 |
倍数长度 |
1 + 64×n |
|
11 |
240/052 |
高容积视频块 |
倍数长度 |
1 + 256×n |
|
12 |
240/140 |
当日时间 |
固定长度 |
3 |
|
13 |
I240/SP |
专用 |
指定长度 |
1 + ^ |
|
14 |
I240/RE |
保留 |
指定长度 |
1 + ^ |
|
FX |
— |
字段扩展指示符 |
— |
— |
B.2.3.2数据项定义
B.2.3.2.1数据项1240/000,消息类型
定义:便于区分消息不同类别。
类型:1个字节固定长度数据字段。
结构:
OCtet no.1
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
MESSAGE TYPE | |||||||
bιts-8(MESSAGE TYPE):消息类型,见表 B.19o 注1:不同类别放置相应的字段项。
注2:类别定义如下:001视频摘要信息;002视频信息。
表B.19消息类别数据项
|
数据项参考号 |
描述 |
001 视频摘要信息 |
002 视频信息 |
|
1240/000 |
消息类型 |
M |
M |
|
1240/010 |
数据源唯一标识符 |
M |
M |
|
1240/020 |
视频记录头信息 |
X |
M |
|
1240/030 |
视频摘要 |
M |
X |
|
1240/040 |
视频头信息 |
X |
Oa |
|
1240/041 |
视频头信息 |
X |
Oa |
|
1240/048 |
视频分辨率及数据压缩 |
X |
M |
|
1240/049 |
视频 |
X |
M |
|
1240/050 |
低容积视频块 |
X |
Ob |
|
1240/051 |
中容积视频块 |
X |
Ob |
|
1240/052 |
高容积视频块 |
X |
Ob |
|
240/140 |
当日时间 |
O |
O |
|
注:M代表必选项;O代表可选项;X代表不可用选项。 | |||
|
a视频信息选择1240/040、1240/041二者选一 O b 视频信息选择 1240/050、1240/051、1240/05 三者选一 O | |||
B.2.3.2.2数据项1240/010,数据源唯一标识符
定义:识别数据来源于哪个系统。
类型:2个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
SAC = OO |
SIC | ||||||||||||||
bιts-16∕9(SAC):系统区域码;
bts-8∕1<SIC):系统识别码O
注:SAC全部填零表示是本地区域数据o
B.2.3.2.3数据项1240/020,视频记录头信息
定义:包含消息唯一序列号。
类型:4个字节固定长度数据字段。
结构:
16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
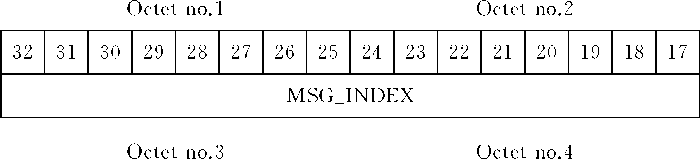
|
MSG.INDEX | |||||||||||||||
bits - 32/1(MSG_INDEX):消息序列号(视频记录循环计数器)。
B.2.3.2.4数据项1240/030,视频摘要
定义:由ASCII字符串描述视频流摘要。
类型:倍数长度数据字段。
结构:
OCtetno.1
16 15 14 13 12 11 19 9
REP
OCtetno.2
8 7 6 5 4 3 2 1
CHAR
bts-16/9(REP):倍数因子;
bits-8/1 (CHAR):描述内容。
B.2.3.2.5数据项1240/040,视频头信息(单位:ns)
定义:定义了一组视频区域单元对应于一个雷达径向视频数据:所有视频区域单元有相同方位角及 距离,此距离是连续递增。
类型:12个字节固定长度数据字段β
结构:
OCtet no. 1 OCtet no.2
|
96 |
95 |
94 |
93 |
92 |
91 |
90 |
89 |
88 |
87 |
86 |
85 |
84 |
83 |
82 |
81 |
|
START_AZ LSB | |||||||||||||||
|
OCtet no. 3 OCtet no.4 | |||||||||||||||
|
80 |
79 |
78 |
77 |
76 |
75 |
74 |
73 |
72 |
71 |
70 |
69 |
68 |
67 |
66 |
65 |
END_AZ LSB
OCtet no. 5 OCtet no.6
|
64 |
63 |
62 |
61 |
60 |
59 |
58 |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
49 |
|
START_RG | |||||||||||||||
OCtet no.7 OCtet no.8
|
48 |
47 |
46 |
45 |
44 |
43 |
42 |
41 |
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 |
|
START_RG LSB | |||||||||||||||
OCtet no.9 OCtet no.10
|
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
|
CELL_DUR | |||||||||||||||
OCtetno.11 OCtetno.12
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
CELL_DUR LSB | |||||||||||||||
bιts-96∕81<START_AZ):®始方位角,单位:360°/216,范围:0°〜360。;
bits80/65(END_AZ):结束方位角,单位:360。/216,范围:0。〜360。;
bits-64/33(START_RG):区域单元开始号;
bks-32/1(CELL_DUR):视频区域单元持续周期,单位:10 9 SO
B.2.3.2.6数据项1240/041,视频头信息(单位:fs)
定义:定义了一组视频区域单元对应于一个雷达径向视频数据:所有视频区域单元有相同方位角及 距离,此距离是连续递增。
类型:12个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
96 |
95 |
94 |
93 |
92 |
91 |
90 |
89 |
88 |
87 |
86 |
85 |
84 |
83 |
82 |
81 |
|
START_ AZ LSB | |||||||||||||||
OCtet no. 3 OCtet no.4
|
80 |
79 |
78 |
77 |
76 |
75 |
74 |
73 |
72 |
71 |
70 |
69 |
68 |
67 |
66 |
65 |
|
END_AZ LSB | |||||||||||||||
|
OCtet no. 5 OCtet no.6 | |||||||||||||||
|
64 |
63 |
62 |
61 |
60 |
59 |
58 |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
49 |
START_RG
OCtet no. 7 OCtet no.8
|
48 |
47 |
46 |
45 |
44 |
43 |
42 |
41 |
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 |
|
START_RG LSB | |||||||||||||||
OCtet no. 9 OCtet no.10
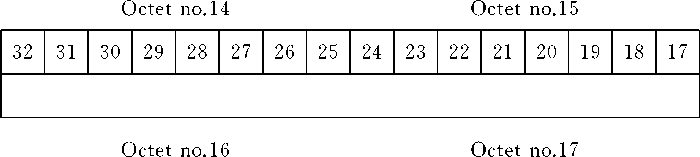
|
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
|
CELL_DUR | |||||||||||||||
OCtetno.11 OCtetno.12
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
CELL_DUR LSB | |||||||||||||||
bits-96/81 (START_AZ):起始方位角,单位:360°/216,范围:0°〜360°; bits80/65(END_AZ):结束方位角,单位:360°/216,范围:0。一360°; bts-64/33(START.RG):区域单元开始号;
bts-32/1(CELL_DUR):视频区域单元持续周期,单位:10 15 SO
B.2.3.2.7数据项1240/048,视频分辨率及数据压缩
定义:定义了视频组所有区域单元中视频信号进行编码时的分辨率大小以及数据是否压缩。 类型:1个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
(C) |
(RES) | ||||||||||||||
bιts-16 (C):区域数据压缩指示符(0 :无压缩;1 :压缩);
bits-15/9:零分隔符;
bιts8∕1 (RES):分辨率,见表 B.20。
表B.20分辨率
|
分辨率编码 |
分辨率 |
比特位的编码长度 |
|
1 |
二值化 |
1 |
|
2 |
低分辨率 |
2 |
|
3 |
中等分辨率 |
4 |
|
4 |
高分辨率 |
8 |
|
5 |
甚高分辨率 |
16 |
|
6 |
超高分辨率 |
32 |
B.2.3.2.8 数据项 1240/049,视频
定义:视频有效字节位数据(非空的字节位)以及视频组整个区域单元数。
类型:5个字节固定长度数据字段。
结构:
OCtet no. 1 OCtet no.2
|
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 |
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
|
(NB_ VB) | |||||||||||||||
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
(NB_CELLS) | |||||||
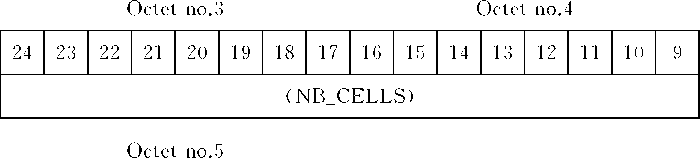
bits-40/25(NB_VB):有效字节位;
bks-24/1(NB_CELLS):有效区域单元数。
B.2.3.2.9数据项1240/050,低容积视频块
定义:这个数据项用于低容积视频流的应用,不超过1 020字节。
类型:倍数长度数据字段。
结构:
OCtet no.l
|
40 |
39 |
38 |
37 |
36 |
35 |
34 |
33 | |
|
REP | ||||||||
|
OCtetno.2 |
OCtetno.3 | |||||||
|
32 |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 23 22 21 20 19 18 17 |
VIDEO BLOCK
OCtet no.4 OCtet no.5
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
VIDEO BLOCK | |||||||||||||||
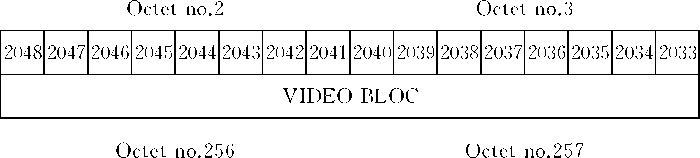
bιts-40∕33(REP):倍数因子,表示以下视频块的数量,最大255;
bts-32∕l(VIDEO BLOCK):视频一个区域单元单一幅度值,此幅度值的分辨率由I240/048字段 定义。
B.2.3.2.10数据项1240/051,中容积视频块
定义:这个数据项用于中容积视频流的应用,不超过16 320字节。
类型:倍数长度数据字段。
结构:
OCtetno.l
|
520 |
519 |
518 |
517 |
516 |
515 |
514 |
513 | |
|
REP | ||||||||
|
OCtetno.2 |
OCtetno.3 | |||||||
|
512 |
511 |
510 |
509 |
508 |
507 |
506 |
505 |
504 503 502 501 500 499 498 497 |
VIDEO BLOCK
OCtetno.64 OCtetno.65
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
VIDEO BLOCK | |||||||||||||||
bιts520∕513(REP):倍数因子,表示以下视频块的数量,最大为255;
bts-512/1 (VIDEO BLOCK):视频一个区域单元单一幅度值,此幅度值的分辨率由I240/048字段 定义。
B.2.3.2.11数据项1240/052,高容积视频块
定义:这个数据项用于高容积视频流的应用,不超过65 024字节。
类型:倍数长度数据字段。
结构:
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
|
VIDEO BLOCK | |||||||||||||||
OCtet no.l
|
2056 |
2055 |
2054 |
2053 |
2052 |
2051 |
2050 |
2049 |
|
REP | |||||||
2056 2055 2054 2053 2052 205l 2050 2049
REP
bιts-2056∕2049(REP):倍数因子,表示以下视频块的数量,最大为254;
bits-8192/1(VIDEO BLOCK):视频一个区域单元单一幅度值,此幅度值的分辨率由1240/048字 段定义。
B.2.3.2.12数据项1240/140,当日时间
定义:以UTC表示的绝对时间戳。
类型:3个字节固定长度数据字段。
结构:
OCtetno.l
|
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 | |
|
Time | ||||||||
|
OCtetno.2 |
OCtetno.3 | |||||||
|
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 7 6 5 4 3 2 1 |
Of Day LSB
bit-16∕1(Time of Day):视频数据时间,单位:1/128 So
B.3 SAC和SlC示例
B.3.1 SAC 示例
SAC示例见表B.21。
表B.21 SAC示例
|
序号 |
系统区域名称 |
代码 |
|
1 |
北京市 |
11 |
|
2 |
天津市 |
12 |
|
3 |
河北省 |
13 |
|
4 |
山西省 |
14 |
|
5 |
内蒙古自治区 |
15 |
|
6 |
辽宁省 |
21 |
|
7 |
吉林省 |
22 |
|
8 |
黑龙江省 |
23 |
|
9 |
上海市 |
31 |
|
10 |
江苏省 |
32 |
|
11 |
浙江省 |
33 |
|
12 |
安徽省 |
34 |
|
13 |
福建省 |
35 |
|
14 |
江西省 |
36 |
|
15 |
山东省 |
37 |
|
16 |
河南省 |
41 |
|
17 |
湖北省 |
42 |
|
18 |
湖南省 |
43 |
|
19 |
广东省 |
44 |
|
20 |
广西壮族自治区 |
45 |
|
21 |
海南省 |
46 |
|
22 |
重庆省 |
50 |
|
23 |
四川省 |
51 |
|
24 |
贵州省 |
52 |
|
25 |
云南省 |
53 |
|
26 |
西藏自治区 |
54 |
|
27 |
陕西 |
61 |
|
28 |
甘肃省 |
62 |
|
29 |
青海省 |
63 |
|
30 |
宁夏回族自治区 |
64 |
|
31 |
新疆维吾尔自治区 |
65 |
|
32 |
台湾省 |
71 |
|
33 |
香港特别行政区 |
81 |
|
34 |
澳门特别行政区 |
82 |
|
35 |
其他区域 |
90 |
B.3.2 SlC 示例
本节以广东省为例,列举了广东省各市区的SIC示例,见表B.22o
表B.22 SlC示例
|
序号 |
系统区域名称 |
唯一识别码 |
|
1 |
广州市 |
00 |
|
2 |
深圳市 |
20 |
|
3 |
珠海市 |
30 |
|
4 |
汕头市 |
40 |
|
5 |
佛山市 |
50 |
|
6 |
韶关市 |
60 |
|
7 |
湛江市 |
70 |
|
8 |
肇庆市 |
80 |
|
9 |
江门市 |
90 |
|
10 |
茂名市 |
100 |
|
11 |
惠州市 |
110 |
|
12 |
梅州市 |
120 |
|
13 |
汕尾市 |
130 |
|
14 |
河源市 |
140 |
|
15 |
阳江市 |
150 |
|
16 |
清远市 |
160 |
|
17 |
东莞市 |
170 |
|
18 |
中山市 |
180 |
|
19 |
潮州市 |
190 |
|
20 |
揭阳市 |
200 |
|
21 |
云浮市 |
210 |
|
22 |
顺德市 |
220 |
|
23 |
南海市 |
230 |
参考文献
[1] GB/T 12182-2018空中交通管制二次监视雷达通用规范
[2] JT/T 628-2005内河VHF船岸数据通信船舶终端设备技术要求
[3] JT/T 1142.1-2017船舶交通管理系统数据交换 第1部分:IVEF格式
[4] JT/T 1142.2-2017船舶交通管理系统数据交换 第2部分:电文格式
[5] JTJ/T 351-1996船舶交通管理系统工程技术规范
[6] 信息安全等级保护管理办法(公通字[2007]43号)
[7] IALA VTS ManUal (EdItIOn 6)