
U 11
船舶工业总公司部标准
CB/Z 192—96
潜艇实艇操纵性试验方法
1996-09-03
1997-04-01 实施
中国船舶工业总公司 发布
1范围
1-1主题内容
本标准规定了潜艇实艇的操纵性试验方法。
1-2适用范围
本标准适用于潜艇在海上的实艇操纵性试验。
2引用标准
GJB 38.14-86常规动力潜艇系泊、航行试验规程操纵性试验
3定义
本章无条文
4 一般要求
4-1实施计划
试验前,以试验大纲等文件为依据编写实施计划,其内容应包括试验的组织、试验目的、海况要求、 测量项目、试验顺序及保证条件等。
4∙2保证船
试验时必须提供保证船一艘,该船应能在试验条件下安全航行并履行其工作职责。
4-3测试用仪表
4- 3-1测试用仪器仪表应按国家计量法的规定经过计量检定合格并在规定的有效期内,它们的量程和 精度应与试验检测的要求相适应。
4∙ 3- 2测试前后仪器仪表应仔细校验和标定,并在待试期间保持良好状态。
4- 3-3测试用仪器仪表应根据测试项目的要求及有关操作规程安装在合适的位置,并注意防潮,防止 在试验过程中因移动、振动及外界环境等诸因素影响测试结果。
4∙4试验条件
4∙4∙1试验海区
4-4-1-1试验应在指定的海区进行,海区水深应不小于0∙ 7倍艇长,而对水下垂直面内的操纵性试验, 水深应大于1倍艇长,并有相应的安全保障措施。
4∙4∙1∙2试验海区的海水密度变化要尽量小,不应有剧烈变化的海流。
4-4∙1∙ 3除特别指明海况的项目外,试验时一般海面风力不大于蒲氏3级,浪级不大于2级。
4∙4∙2试验潜艇的状态
4-4-2-1潜艇应处于良好的技术状态,凡影响操纵性试验的故障均应排除。
1
4.4∙ 2.2潜艇应处于正常排水量状态,横倾不大于O. 5。,重心位置及横稳心位置应符合设计要求。
4-4-3艇的行进间均衡
4∙4∙3∙1试验前必须排除舱底积水。
4∙4∙ 3-2试验过程中禁止艇上人员越舱走动。
4∙4∙ 3. 3水下试验前要仔细作好均衡,试验中无调水指令不得随意注排水或移调水。
4-5意外情况处理
试验过程中在岀现可能危及舰艇安全的情况时,艇长有权采取果断措施,取安全航向和航速航行, 直至下令中断试验。
4- 6试验数据记录
试验数据应按附录3(参考件)中的相应表格记录。
5详细要求
5- 1试验项目
5-1-1水面状态的操纵性试验
水面状态的操纵性试验项目有:
a. 回转试验;
b. 螺线试验或逆螺线试验;
c∙回舵试验;
d. Z型操舵试验:
e. 制动试验;
f∙倒车试验。
5-1-2水下水平面内的操纵性试验 -
水下水平面内的操纵性试验项目有:
a, 水下回转试验;
b∙水下螺线试验或逆螺线试验;
c∙水下回舵试验;
d. 水下Z型操舵试验:
e. 水下制动试验;
f∙水下加速性能试验;
g∙水下倒车试验。
5.1-3水下垂直面内的操纵性试验
水下垂直面内的操纵性试验项目有:
a∙升速测定试验;
b. 逆速测定试验;
c∙超越试验;
d∙变深度试验;
e.航向和深度保持试验;
f∙空间机动试验。
5-1-4平衡角和水动力系数测定试验
平衡角和水动力系数测定试验项目有:
a. 平衡角测定试验;
b. 零升力和零力矩系数测定试验;
c∙升降舵的水动力系数测定试验;
d∙艇的水动力系数对垂向速度导数测定试验;
e∙艇的纵倾力矩系数对纵摇角速度导数的测定试验;
f∙舵杆扭矩测定试验。
5-1-5试验项目的选择
潜艇首制艇或后续艇在系泊和航行试验中的操纵性试验项目选择,应根据GJB 38.14-86的规定。 对于其他特定目的的试验,应根据试验的目的来选择。
5-2试验目的和方法
5.2.1回转试验
测定潜艇在水平面内的回转能力。
5- 2-1.2-1潜艇以规定的航速稳定直线航行。水下试验时保持定深。
5∙2.1∙2∙2试验开始,按预定舵角发出操舵令,并以最快速度操舵,直至预定舵角时把定不动,使艇进 入回转。进行水下回转试验时,运用升降舵保持艇的深度。
5- 2-1-2- 3潜艇回转至首向角变化达540。后,一次回转试验结束。
用仪器连续记录回转过程中的艇的航速、首向角、舵角、回转角速度、纵倾角和横倾角等参数。若在 水面回转试验中采用DGPS(差分全球定位系统)测量艇的位置,则连续记录艇的航迹等参数。若无仪器 连续记录时,可利用秒表和艇上的罗经、计程仪和舵角指示器等显示仪表,自操舵开始时记录首向角变 化为1。、5°、10°、30。、60。、90。、••••••、540°时的时间和航速,并且记录舵角和稳定回转时的纵、横倾角等参 数。在水下回转试验时,还要记录作定深回转时的均衡水量和首尾升降舵角。
从试验记录可得到下列结果:
c∙定常回转横倾角。及回转时的最大动横倾角如
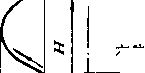
根据测试记录计算并绘制回转航迹图。从航迹图上可得到下列结果(图1):
c∙反横距為;
d.战术回转直径。对
e∙定常回转直径
f∙漂角仇
VM
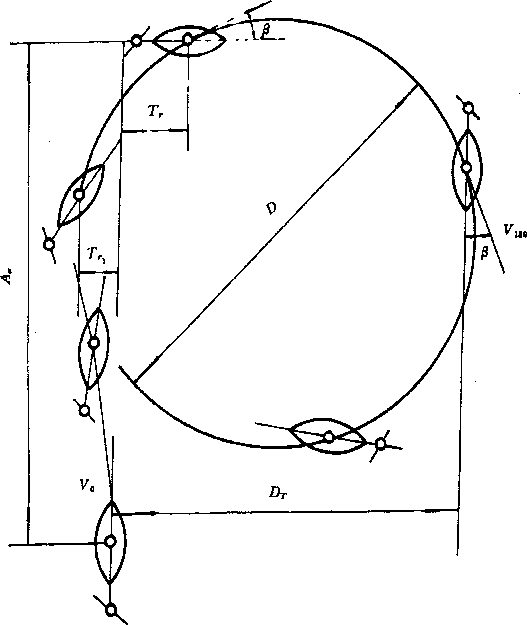
图1回转试验
测定潜艇的航向稳定性。
5.2∙ 2∙2∙1潜艇以规定的航速稳定直线航行。水下试验时要保持定深。
5.2- 2- 2- 2试验开始,将方向舵转至右15。舵角,把定舵角,艇开始向右向转。
5- 2- 2- 2- 3待回转稳定后,回舵至右10°舵角,并把定舵角,待艇回转再次稳定后,将舵角再转至下一 个舵角进行试验。依此过程进行试验,直至左15。舵角。
5- 2- 2- 2-4然后再做从操左15。舵角开始直到右15。舵角的另一个试验过程。
5∙2.2.2.5若试验从操右舵开始到左靛1°时,艇依然向右回转,则可再依次作操左2。、左3。、……的试 验。这种每操1°舵角的试验直至出现向左回转时为止。
试验从操左舵开始转至操右舵时,若遇有上述类似现象时,也如此进行每操1°舵角的试验。
5- 2- 2- 2-6若试验因故中断,当要继续试验时,应从中断时的前一个试验舵角处开始顺序时行。
4
用仪器测量记录潜艇在各个操舵角下进入稳定回转时的转赠角速度、实际操舵角、航速、横倾角等 参数。水下螺线试验时,还要记录均衡水量及首尾升降舵角。
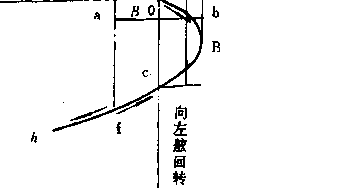
根据试验记录,绘成如图2所示的转椭角速度对操舵角的关系曲线r'〜力。
从M〜毎图,可评定潜艇的航向稳定性。如果潜艇航向不稳定,则从图2(b)可得到不稳定滞后环的 宽度B及高度
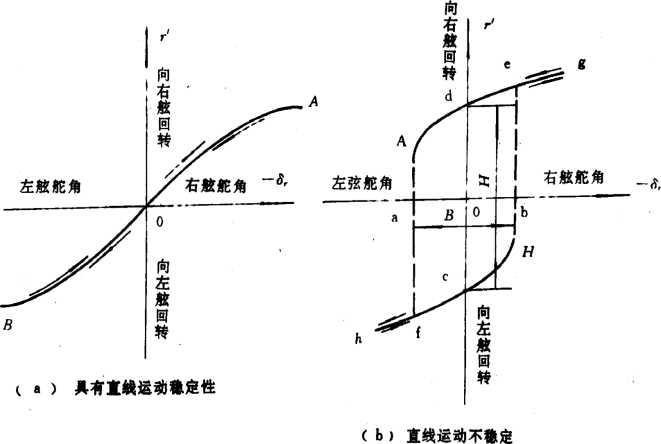
图2螺线试验
测定潜艇的航向稳定性。
5- 2- 3.2-1潜艇以规定的航速稳定直线航行。水下试验时要保持定深。
5- 2.3- 2- 2试验按预先选定的若干个转赠角速度值,操纵方向舵使艇达到所选定的回转角速度,通过 操舵尽可能精确地保持所选定的回转角速度。
5∙2∙ 3- 2-3待艇以所选定的回转角速度稳定回转时,然后进行下一个转艄角速度的试验。
在每个选定的回转角速度试验中,待回转趋于稳定后用仪器记录转艄角速度、方向舵角、航速、横倾 角等参数。水下逆螺线试验时,还要记录均衡水量及艄舰升降舵角。
根据测量结果,绘成如图3所示的转艄角速度对方向舵角平均值的关系曲线/〜M
从图F〜M可评定潜艇的航向稳定性。若潜艇航向不稳定,则从图3(b)上可得到不稳定滞后环的 宽度8和高度
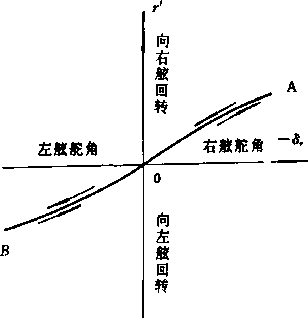
(8 )具有直线运动稳定性
A
左破舵角
右厳舵角 f
(b)不具有直线稳定性
图3逆螺线试验
逆螺线试验还能测岀航向不稳定潜艇在不稳定滞后环内的回转角速度与舵角之间的关系曲线。
5∙2∙4回舵试验
测定潜艇的航向稳定性。
5- 2- 4- 2-1潜艇以规定航速作稳定直线航行。水下回舵试验时要保持定深。
5∙2∙4∙2∙2试验开始,操右15。舵角向右回转。
5- 2- 4.2- 3当艇回转稳定后,操舵回中,使艇退出回转运动状态。当回转角速度逐渐减小,直至角速度 为零或某一稳定剩余角速度值时,一次回舵试验结束。
5-2-4- 2-4按相似方法做向左回转时的回舵试验。
用仪器记录整个试验过程中的转艄角速度随时间的变化。
根据测量结果,绘成如图4所示的回转角速度对时间的关系曲线r〜乙
从图4可评定潜艇的航向稳定性:如果左、右回舵试验的剩余角速度为零,则潜艇是航向稳定的;否 则是航向不稳定的,左、右剩余角速度之差即为不稳定滞后环的环高Ha
右舷方向
O 左«方向
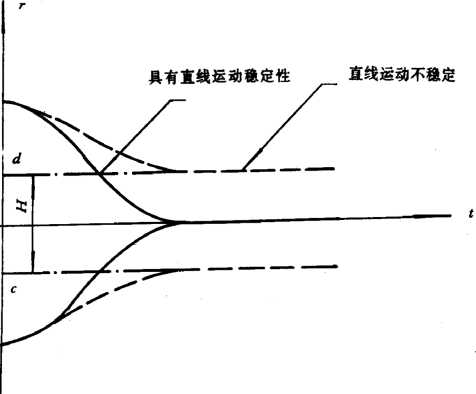
图4回舵试验r-t关系曲线
测定潜艇的航向稳定性指数T和回转性指数KO
5.2.5- 2-1潜艇以规定航速稳定直线航行。水下Z形操舵试验时要保持定深。
5∙2∙5∙2∙2试验开始,操纵方向航到规定操舵角,例如右10。,把定舵角,艇开始向右回转。
5- 2- 5.2- 3当首向角变化到偏离初始赠向为右10。时,立即操方向舵到左10°把定舵角。
5.2.5.2.4当艇开始向左回转,并且艄向角变化到偏离初始首向为左10。时,立即操方向舵到右10°, 把定舵角。
5- 2- 5- 2-5当艇再次向右回转,并且艦向角变化到偏离初始赠向为右10。时,立即再次操方向舵到右 1。°,把定舵角。 ,
5- 2.5- 2- 6当潜艇再次向左回转,并且館向角到达初始順向后,操舵回中,一次Z形操舵试验结束。
5- 2- 5- 2-1待潜艇回复到稳定直线航行后,可进行下一次试验。
试验过程中用仪器连续记录艇的韻向角、艄摇角速度、方向舵角、航速等参数随时间的变化。
将记录的艄向角。、赠摇角速度r和方向舵角M绘制成图5所示的随时间t变化的关系曲线。
从图5上可直接得到初转期4、超越韻•向角政<„、艄向角超越时间,。八半周期丁心全周期TO等参数。
根据图5取得各特征点的参数值,按附录A(参考件)的Z形操舵试验K、T的特征点计算法,求出稳 定性指数T和回转性指数K。
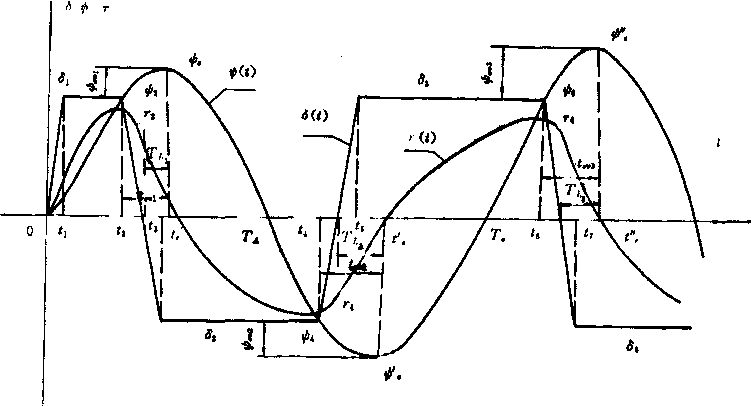
. 图5 Z形操舵试验
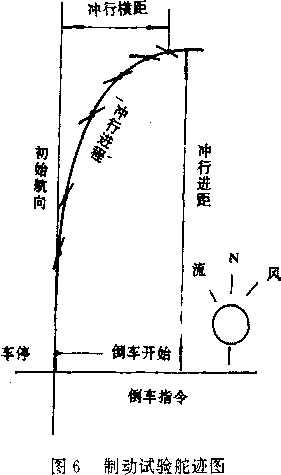
测定潜艇的惯性制动能力。
5∙2∙6∙2∙1潜艇在预定航向上以规定航速稳定直线航行。水下试验时要保持定深。
5- 2- 6- 2- 2试验开始,发“停车”令,车停后艇呈惯性滑行,试验进行到艇相对于海水“静止"为止。
5.2- 6.2- 3如果是紧急制动试验,则试验开始,发“倒车'‘令,艇先停车,并根据主机操作规程转换到倒 军工况,直至试验时行到艇相对于海水“静止”为止。
用仪器连续测量试验过程的航速和首向角等参数。
根据测量结果,计算并绘制制动过程航迹图,如图6所示。
从航迹图和测量记录可得到潜艇的制动冲行进距、冲行横距 和制动时间等。
5.2- 7水下加速试验
5- 2- 7-1试验目的
测定潜艇的水下加速性能。
5- 2-7-2 '试验方法
5∙ 2-1- 2.1潜艇在水下以规定航速作稳定定深直线航行J
5- 2- 7- 2- 2试验开始,潜艇加速,使转速增加到规定转速。
5∙2∙ 7.2-3试验进行到航速稳定时结束。
测量记录试验过程的航速、艄向角、纵倾角和舵角等参数 的变化。
8
从记录得到从不同初速加速到水下最大航速的时间及距离。
检查潜艇的倒航操纵性能。
5- 2- 8- 2-1艇以规定航速稳定直线航行。水下试验时要保持定深。
5.2- 8- 2- 2试验开始,主机按操作规程转换为倒车工况,艇在消除前进余力后,开始倒航。
5- 2- 8- 2- 3用方向舵控制艇的倒航方向,检査艇的倒航可操纵性。
5∙ 2- 8- 2- 4水下倒航试验时,应运用艄覗升降舵及注排水和调水等措施以平衡倒航时产生的纵倾力 矩和浮力变化,使艇保持定深。
用仪器记录试验过程的首向角、深度、舵角、纵倾角、首摇角速度以及注、排水量和调水量等参数。
根据倒航时的航向控制结果,判定艇的倒航操纵性能。
5.2- 9侧推装置离靠码头试验
5∙ 2∙ 9∙1∙ 1停航甩尾试验是为了测定侧推装置甩尾时间和转首角速度。
5- 2- 9-1-2离靠码头试验是为了检查用侧推装置离靠码头的效能。
5∙2∙9∙2∙1停航甩尾试验方法为:
a.潜艇在无风浪情况下,停靠在码头上;
b∙解开龌缆,系住艄缆,启动侧推装置向内舷喷水,使艇尾离开码头,直至艇与码头成45。。
5∙2∙9∙2∙2离码头试验方法为:
a. 潜艇停靠在码头,解开尾缆;
b. 启动侧推装置向内舷喷水,使艇尾向外甩开一个角度(约30。);
c∙迅速收回首缆;
d.启动主电机,倒航退离码头。
a.潜艇进港后,根据指定停靠的码头位置选择与码头成一定的夹角(约30。),以低速向码头接近;
b∙在距停靠位置3〜4倍艇长时,停车滑行;
c∙当艇首接近码头时,倒航以消除余力;
d∙前进余力消除后,迅速带上首缆,收缆时应在艇首与码头间留有2〜3米的横距;
e∙启动侧推装置向外舷喷水,使艇尾靠近码头,并迅速带尾缆。
记录试验过程中的侧推装置的实际转速、艇的首向角及角速度和甩尾及离靠码头的时间等参数。
5∙2∙ 9- 4-1根据试验记录得到甩尾的时间及转首角和角速度。
5∙ 2∙ 9∙ 4∙ 2根据试验判断侧推装置靠码头的效能。
5∙2∙10升速测定试验
测定潜艇由正、负浮力或赠、幌升降舵角产生的深度定常变化率。
5- 2.10- 2-1潜艇在规定深度,以预定试验航速定深直线航行。
5.2.10.2.2对浮力调整水舱注或排预定的水量,或将赠(或艇)升降舵迅速操到预定舵角把定不动, 非试验的升降舵保持零度不动。
5∙2∙10.2-3当艇的深度变化达到稳定状态时,结束试验。 .
5∙2.10∙ 2-4 •进行试验时要防止危险纵倾角出现。
用仪器记录试验过程的航速、腊、艇升降舵角、深度、纵倾角等参数。并记录注排水量。
根据记录计算试验航速下的升速。即得到相应于试验航速V的浮力调整水舱每吨注(排)水量的艇 的速升率或每度赠(或舰)升降舵角的艇的速升率。
5-2-11逆速测定试验
测定舰升降舵的逆速,检査麟升降舵是否存在逆速。
5.2.11- 2-1艇在适当深度,以预先估计的略高于逆速的航速航行,仔细作好动均衡。
5.2.11- 2-2覗升降舵操上浮舵(例如15。),当纵倾角趋于稳定时,观察艇的深度变化。
5∙ 2∙11∙ 2. 3如果艇呈正常操纵性,即艇上浮,则降低电机转速(一般每次降低5r∕min),重新仔细进行 动均衡,重复上述试验。
5- 2.11.2.4当航速降到一定值时,操纵舰升降舵只对艇的纵倾角起作用,而对深度变化不起作用,则 此时的航速即为幌升降舵逆速。
5∙ 2-11-2-5艄升降舵(或围壳舵)在使用航速范围内一般不存在逆速。若有必要进行检査时,试验方 法同上。
记录每次试验的电机转速和航速,以及此航速下艇的深度变化趋势。
根据试验记录和观察,得到龌升降舵的逆速值及对应的螺旋桨转速。
测定艇对升降舵的应舵能力。
5∙2∙12∙2∙1艇在适当深度以预定航速作无纵倾定深直航。
5- 2-12.2.2将试验的升降舵(赠或幌)操到预定舵角4(例如10。),把定不动,艇的纵倾角和深度开始 发生变化。 •
5∙2∙ 12- 2- 3当纵倾角达到预定的执行纵倾角Q时,立即反向操舵到抑制舵角值用(=—曷),把定不 动;
5∙ 2∙12∙ 2-4当纵倾角和深度的变化都经历极值后,试验结束。
利用仪器记录试验过程的航速、升降舵角、纵倾角和深度的变化,记录曲线如图7所示。
IO
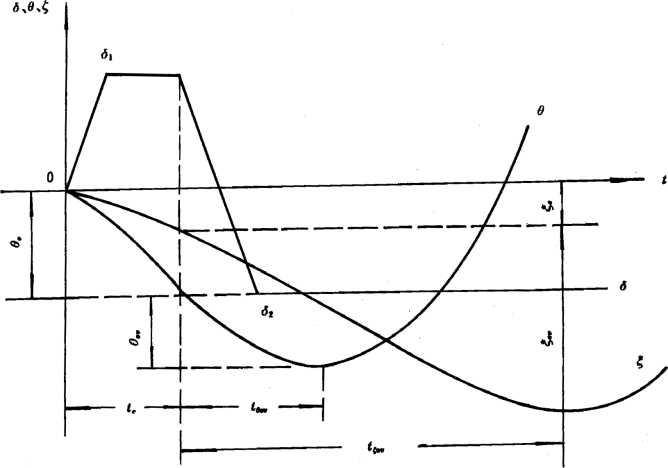
图7超越试验
从记录结果可取得如下参数:
a. 超越纵倾角為;
b∙超越深度
C-执行时间4(或人);
d∙纵倾角超越时间、深度超越时间
5-2-13变深度试验
测定潜艇在规定纵倾角内,以最小超深和最短时间改变深度的能力。
5- 2-13.2-1艇在适当深度,以预定航速作无纵倾定深直航。
5∙2∙13.2∙2升降舵操相对下潜(或上浮)舵,使艇很快造成预定的纵倾角,并用升降舵使艇呈预定纵 倾角下潜(或上浮)。
5∙ 2-13- 2- 3当深度接近预定深度时,立即回舵消除纵倾角。并操纵升降舵,使艇以最小的超深达到预 定的深度。
用仪器记录试验过程的航速、深度、纵倾角和升降舵角等参数。
从试验记录取得下列参数:
a∙达到预定的深度改变所需的时间如;
5.2.14航向和深度保持试验
测定用舵保持潜艇直航和定深的能力。
5- 2-14- 2-1艇以预定航速定深直航。.
5. 2-14. 2. 2试验开始,方向舵置于零舵角保持3至5min,测量艇的航行状态。
5- 2.14. 2. 3重新整定航向和深度,方向舵用人工操作方法作定深直航,观测3至5min°
5∙ 2∙ 14-2-5试验过程中用升降舵保持深度。
用仪器连续记录每次试验过程中的航速、舵角、首向角、深度和纵倾角等参数。
a∙从记录得到如下结果:
b. 艄向角偏离的大小、方向舵的操鸵频率和平均操舵角;
c. 深度和纵倾角偏离的大小、艄靦升降舵的操舵频率和平均操船角。
5.2- 15空间机动试验
测定潜艇进行螺旋式潜浮机动时升速和回转半径。
5- 2.15∙2∙1艇在适当深度,以预定航速定深直航。
5∙2∙15∙2.2将方向鸵和升降舵分别操到预定舵角,把定不动•
5∙M523艇进入回转和潜浮运动,直到运动稳定时为此
用仪器记录试验过程的航速、深度、首向角、转艦角速度、纵倾角、横倾角及方向舵和升降舵角等参 数。
从试验的稳定运动状态,可得到下列参数:
定常回转半径R;
b∙升速比一潜浮速度Vf与水平回转速度V,之比,V√Vf;
c.升距一回转360。的潜浮深度的改变量,&狮.
5-2-16平衡角测定试验
测定静均衡的潜艇在不同航速下的平衡角。
5-2-16.2d .潜艇在适当深度仔细进行静均衡,均衡时航速为零(或在尽可能低的航速下)。
5∙ 2∙ 16∙ 2∙ 2 艇加速到预定航速,借助舶升降舵(醒升降舵为零),使艇以某纵倾角作定深航行,直到
稳定时为止。 ;
5∙ 2-16.2- 3然后将艦升降舵回零,操纵艇升降舵,使艇以另一纵倾角作稳定的定深航行。
5∙ 2∙ 16- 2-4以上为一个航速下的试验过程,有条件时应在三种以上不同航速下进行测试。
记录试验时的航速及艇达到平衡状态时的平衡纵倾角和升降舵角。
根据不同航速下分别操艦或曜升降舵时的平衡角,并绘制成平衡角对航速的关系曲线。
5.2∙17零升力和零力矩系数测定试验
12
5∙2∙17∙1试验目的
测定潜艇的零升力系数z,.和零力矩系数Ml.。
5∙ 2∙ 17-2试验方法
5- 2-17.2-1艇在适当深度,以尽可能低的航速VO定深航行,准确进行动均衡。
5- 2-17- 2- 2航速改变到匕,同时调节浮力调整水舱和纵倾平衡水舱的水量,使艇保持无纵倾、零舵角 定深航行状态,重新达到动均衡。
5∙2∙17∙ 2-3试验可在几种不同的航速下进行。
5∙ 2∙17∙3测量参数
在每个航速下当艇达到均衡状态时,记录航速和浮力调整水舱的注排水量及纵倾平衡水舱的移调 水量。
5- 2∙17∙4试验结果
根据记录数据,由公式(1).(2)分别算出零升力系数ZJ和零力矩系数
Mt = 2g(PjXp ■- QjXQ)........................................
式中:匕—~第j次试验时的航速,m/s;
Qt——相对于初始状态的浮力调整水舱的注排水量,以排水为正,m3 ;
Pi——相对于初始状态的纵倾平衡水舱的移水量,以从尾向首移水为正,HP;
XQ——浮力调整水舱注排水的容积中心相对于艇的重心的纵向位置,m;
XP--赠、幌纵倾平衡水舱容积中心之间的距离,m;
L--艇长,m;
g——重力加速度,9.81m∕s∖
若试验进行多次,应取各次测试结果的平均值作为结果。
5- 2-18升降舵的水动力系数测定试验
5∙2∙18∙1试验目的
测定艄、視升降舵的水动力系数的导数Z、、Z%、M、和MlSSQ
5∙ 2∙ 18-2试验方法
5∙2∙18∙2∙1艇在适当深度,以预定航速航行,并准确进行动均衡,使艇作无纵倾定深直航。赠、幌升降 舵置于零舵角。
5∙ 2-18.2-2将被测试的升降舵(例如艄升降舵)操到预定舵角,把定不动,同时调节浮力调整水舱和 纵倾平衡水舱的水量,使艇保持无纵倾定深直航。另一对升降舵在试验过程中应保持零度不动。
5- 2-18.2-3试验达到均衡状态后,一次舵角的舵力测试结束。改变试验舵角到下一个预定舵角值,重 复上述均衡过程。
5∙ 2-18- 2-4每对升降舵在一个试验航速下,至少应进行包括满舵角在内的五个以上不同舵角的测 试。
5.2-18-3测量参数
每次试验达到均衡状态后,记录试验的航速、升降舵角及相对于零舵角均衡状态所调节的水量。
5- 2-18-4试验结果
根据记录数据,由公式(3).(4)分别算岀升降舵的水动力系数:
Z'(a,) =捋........................................... (3)
M(M)= 2g(締L Q,XQ) ................................⑷
13
式中:勿(M)——由号产生的无因次升力系数;
M'(Sj)——-由郊产生的无因次纵倾力矩系数;
卩 试验时的航速,m/s;
QJ——相对于零舵角均衡状态的浮力调整水舱的注排水量,以排水为正,m%
PI——相对于零舵角均衡状态的纵倾平衡水舱的移水量,以从尾向首移水为正,m3 ;
Xq——浮力调整水舱注排水的容积中心相对于艇的重心的纵向距离,m;
X,——首、尾纵倾平衡水舱容积中心之间的距离
L---艇长,m;
Sj——试验舵(艄或幌升降舵)的舵角值,rad。
然后,由测试结果曲线ZZ(3)〜 * 0)〜旗求岀a = O处的曲线斜率,或用最小二乘法求得水动 力系数对舵角a的导数z,a和M'so (d为艄或覗升降舵角,ad 或3 = Q。
5- 2-19艇的水动力系数对垂向速度导数测定试验
测定艇的水动力系数对垂向速度的导数Z,W和M
5-2∙ 19-2-1艇在适当深度,以预定航速航行,准确进行动均衡,使艇作无纵倾定深直航,升降舵置于 零舵角。
5.2-19- 2.2调节浮力调整水舱和纵倾平衡水舱的水量,使艇以预定的纵倾角作定深直航,而升降舵 仍保持为零。
5- 2-19- 2- 3 一次试验结束后,重新进行上述调节水舱水量的均衡试验,使艇以另一个纵倾角作定深 直航,直至试验全部完成。
5-2-19- 2-4在一个航速下,至少进行三个不同纵倾角的试验°
在每次试验中,应记录航速、纵倾角及相对于该航速下零纵倾角均衡状态所调节的水量。
根据试验记录,可由式(5),(6)分别算得由纵倾角%所产生的水动力系数:
"=丝濬L .............. ∙∙∙∙∙∙∙∙∙ (S)
|
M_ 2g[(R∙Xj, — QjXQ)COs% + ▽•五∙ sin%]............... |
.........(6) |
|
AZ l*) — V2L3 式中:z(q)——由仇•产生的无因次升力系数; | |
|
M'(θi)-一 由θj产生的无因次纵倾力矩系数; V—试验时的航速,ɪn/s; . Qj——相对于零纵倾角状态的浮力调整水舱的注、排水量,以排水为正,∏Λ P—相对于零纵倾角状态的纵倾平衡水舱的移水量,以从尾向首移水为正,m3; Xq——浮力调整水舱注、排水的容积中心相对于艇重心的纵向位置,m; X,—首尾纵倾平衡水舱容积中心之间的距离,m; L---艇长,m; g——重力加速度,9.81m∕sZ; ▽——潜艇的水下全排水体积,m3; h——潜艇的水下稳心高,m; θi——试验的纵倾角,rad° |
由得到的z,e)N (B)与纵倾角θ的关系,可求得水动力系数对垂向速度的导数Z成和"w,即* 和 M19a
5- 2- 20艇的纵倾力矩对纵摇角速度导数的测定试验
5- 2- 20-1试验目的
测定艇的纵倾力矩系数对纵摇角速度的导数M'qa
5- 2- 20- 2试验方法
5- 2- 20- 2-1艇在适当深度,以接近解升降舵逆速的航速作无纵倾、零舵角定深直航。
5∙2∙20∙2∙2试验开始,舰升降舵以预定的幅值和接近纵摇固有周期的周期,作周期性操舵。.
5∙2∙20∙2∙3当艇的纵摇周期性运动趋于稳定时,试验结束。
5- 2- 20- 3测量参数
用仪器连续记录纵倾角、解升降舵角、深度和航速等参数。
5- 2-20-4试验结果
5.2.20.4.1 从试验记录得到操舵周期T(s)、平均操舵幅值3SAC×稳定运动时的平均纵倾角幅值
心(°)、以及纵倾角滞后于舵角的相位角ε(o)0
5.2.20-4.2若解升降舵作正弦操纵,则Mlg近似由公式(7)算岀:
式中:/=2就∕T∙V ——无因次操舵圆频率。
5.2.20.4.3若解升降舵作周期性Z形操纵,则Mlq近似由公式(8)算出;
式中,ω' = 2πL∕T ∙ V ——无因次操舵圆频率。
5- 2- 21舵杆扭矩测定试验
5-2-21-1试验目的
测定舵杆上受到的水动力扭矩
5- 2- 21.2试验方法
5∙2∙21∙2∙1艇在适当深度,以预定航速定深直航。
5-2- 21-2-2将被试验舵操至预定舵角,保持舵角约5s,立即反向操舵到零度,停留几秒钟,然后再操 舵到预定航角的反向舵角保持舵角约5s,再回舵到零。
5-2-21-2.3 试验所操舵角为5°→o→- 50→o→io0→o→- ιo0-*o→……→满舵角。当在垂直 面内试验时发现危险纵倾时应中止试验。
5- 2-21-3测量参数
常用的测试舵杆扭矩的方法有两种:直接测量舵杆扭矩的应变测量法和间接测量扭矩的液压测量 法。在潜艇上,舱内很难或不能直接测量舵杆扭矩,因此常用液压测量法测量。
试验时,用仪器测量记录试验舵的实施压机液压缸内前卮两腔的液压差,以及舵角、航速等数据。
5.2-21.4 试验结果 '
根据测量记录,则在某航速下对应舵角a的舵杆扭矩由公式(9)算出:
M = K ∙ ΔP ∙ cos3 ....... (9)
式中XP——液压差,MPa;
K—简化计算常数,n?。与舵的传动部分各传递效率、摩擦系数等因素有关。
根据各个舵角下的测试结果,得到舵杆扭矩与舵角和航速的关系。
附录A Z形操舵试验K、T的特征点计算法 (参考件)
AI艇在水平面内的运动可简化为一阶模型用式(AI)表示:
T % + r = κarn0) + K •蜀 (Al)
式中∙r = dψ∕dt--偏航角速度;
a--操舵角;
T、K——操纵性指数。
根据试验记录,方程在不同的区间积分,即可得到K,τ值。计算步骤按A2〜A4条。
A2从试验曲线(图5)上读取计算需要的下列特征点值:
a.操舵开始和停止的时刻勺,, t3所,*6和t∙j 3
b∙舵角的观测值<J1,¾3s和旗;
c∙实际的执行偏航角3«,
d∙到达执行偏航角时的偏航角速度r2,r4,r6及初始偏航角速度r0;
e∙偏航角速度等于r0处的偏航角ψe,ψle,ψ"e,及其对应的时间te,t'e,t"e.
A3按下列步骤分段计算积分,求得所需参数
A3∙ 1从/ = 0到t = t'e和t"e积分,由式(A2)和式(A3)联立可解出K和 明此K记作K68o
J 0
J O
J O
将上面的代入,按式(A4)可算得k,记作ki O
A3. 3从£ = i2到4积分,将荷和K代入,按式(A5)可算得T,记作TiO
T(r0 — r2) + (如-妇=k[,δm{t}dt + K ∙∆s∙ (te- t2)
JtZ
A3.4从t = t4到已和t = h到广6分别积分,将湿和代入,按式(A6)和式(A7)可算得"记作T68。
Ts — rt) + (ψ,e — ≠4) =^f Sm(t)dt + K ∙ ΔS (七一Λt)
J %
Γt"e
T(r0 - r6) + (ψ"e -ψ^=k∖ Sm(t)dt + K - ∙ (t"e - Z6)
A3∙ 5将码和X68,T4和T68平均,得到本次试验结果的K,T值。
A3∙6按式(A8)计算无因次结果。
A4测量舵角购)的定积分,按式(A9)计算:
们 Q2∕2") O ≤ ≤ Z1
3] (t /2) tγ V t W,2
4[。2 + G/2 — *ι∕2] + 3z [t — (z2 + Z3)∕2] qWtWM
曷[。2 + G/2 —外/2] + δ2[^t 一 (Z2 + /3)∕2]
+。3 —由)Q — 4)2/2(^5 + *4) #4 W # W ¢5
MQ2.+ 处)/2 — £}/2] + 82[Q4 + /5)/2 —。2 + G/2]
+ ʤk — Q4 + Q∕2] ≤ ≤ ^6
们[。2 + 4)/2 — Z]∕2] + 曷[。4 +,s)/2 — (% + 乌)/2]
+ —。4 + Z5)∕2] + (S4 — 63)Q 一 為)2/2(和—4) ,6 <,<,7
由[。2 + %)/2 — /1/2] + 爲[("+,5)/2 —(如 +,3)/2]
+ 爲[。6.+ 与)/2 一。4 + Q/2] + —(4 + 乌)/2] 和 ≤ 1
附录B 试验结果表 (参考件)
表Bl回转试验结果汇总表
|
艇舷号:........................... |
.................,试验日期; .… |
...............年.…― |
............月............. |
……日 |
|
试验诲区:....................... |
...............水深:.................... |
......:.............m, |
海水密度;.……. |
.....................t∕m3 |
|
风向风力:.................:..… |
...............................................,浪级:................... |
..................., |
流向流速:…— |
|
试验序号 |
1 |
2 . |
3 |
4 |
|
方向舵角&,(°) 初始直航速V°,kn 初始螺旋桨转速n0.r∕mi∏ 试验深度,m 定常回转航速V,kn 相对速降1 - V/Vo 定當转格角速度r,o/s 定常回转直径D,m 相对回转直径DAL . 进 距 横 距Tr,m 反横 βT∏,m 战术直径Dτ,m 定常回转横倾角Φ.(o) 最大动横倾角Φmax,C) 稳定纵倾角θ,(°) 漂 角毎(°) 回转周期T,s 转首90。的时间如,s 定常回转时JW升降舵角&,(°) 定常回转时⅞⅞升降舵角心,(°) |
表B2螺线(逆螺线)试验结果表
艇舷号:............................................,试验日期;....................年……. ............月....................日
试验海区:—一...................................,水深:.................j..........m,海水密度: ........................t∕m3
风向风力:........................................,浪级.........................................流向流速:........................................
初始航速:一…......................kn,螺旋桨转速(左/右):............r∕min,试验深度:............ɪn
|
序号 |
方向舵角 (。) |
稳定回转角速度 Vs |
实际方向舵角 (°) |
航速 kn |
稳定回转横倾角 (。) |
纵倾角 (°) |
赠/舰升降舵角 (β) |
|
1 | |||||||
|
2 | |||||||
|
3 | |||||||
|
4 | |||||||
|
5 | |||||||
|
6 | |||||||
|
7 | |||||||
|
8 | |||||||
|
9 | |||||||
|
10 | |||||||
|
11 | |||||||
|
12 | |||||||
|
13 | |||||||
|
14 | |||||||
|
15 | |||||||
|
16 | |||||||
|
17 | |||||||
|
18 | |||||||
|
19 | |||||||
|
20 | |||||||
|
21 | |||||||
|
22 | |||||||
|
23 | |||||||
|
24 | |||||||
|
25 | |||||||
|
26 |
表B3 Z形操舵试验结果表
艇舷号:..........................................,试验日期: ...................一年..............……月.…… ............日
试验海区;................................……―,水深:..… ...............................m,海水密度:..............._____........t∕m3
风向风力:........................................,浪级:......................................... 流向流速:...........................
|
试 验 序 号 |
1 . |
2 |
3 |
4 |
|
试验深度,m | ||||
|
初始直航速V,kn | ||||
|
螺旋桨转速,r∕min | ||||
|
初始首向角,(。) | ||||
|
预定操舵角 | ||||
|
换舵首向角如(°) | ||||
|
ta,s ⅜∏ ⅜⅛ ⅛fl _____________________ | ||||
|
仞 持 朋 ta, | ||||
|
Tl,S $6首海后 ________ | ||||
|
-FY θ ∏∏ ∕∏ TL | ||||
|
超越角ψovΛ°) | ||||
|
超越时间垢,s | ||||
|
半周期TqS | ||||
|
全周期匸,S | ||||
|
KfS ι∏τ⅛⅛At⅛*⅛ ________________ | ||||
|
I=ITf±7H XX. κ, | ||||
|
T,s 玲生牲⅜⅛⅛⅛∙ _____________ | ||||
|
g 疋 1x⅛sjI T |
表B4制动试验结果表
艇舷号:.......................................一一,试验日期:____________________年....................月....................0
试验海区: ...................................,水深'.............................................m,海水密度:................. t∕m3
风向风力:........................................,浪级:........................................, 流向流速:…… .................................
|
试验序号 |
1 |
2 |
3 |
4 | |
|
停 车 制 动 |
初始航速,kn 初始螺旋桨務速,r/ɪnin 初始深度/艇停止深度,m 自停车令起到车停的时间,s 自停车令起到艇停止的时间,s 冲行迹程,m 冲行进距,m 冲行横距,m 最大横倾角,(°) 最大纵倾角,(°) | ||||
|
倒 制 动 |
初始航速,kn 初始螺旋桨转速,r∕min 初始深度/艇停止深度,m 自倒车令起到车停的时间,s 自倒车令起到艇停止的时间,s 自倒车令起到全工况倒车的时间,s 倒车螺旋桨转速,r∕min 冲行迹程,m 冲行进距,m 冲行横距,m 最大横倾角,(。) 最大纵倾角,(°) |
表B5水下加速试验结果
艇舷号:............................................,试验日期; ....................年....................月....................B
试验海区:… .........................,水深;........................................m.海水密度:............... t∕m3
风向风力:........................................,浪级:........................................, 流向流速:........................................
|
试.验 序 号 |
1 |
2 |
3 |
4 |
|
定深宜航深度,m | ||||
|
定深直航初始速度,kn | ||||
|
最大航速,kn | ||||
|
达到最大航速的时间,S | ||||
|
达到最大航速的行进距离,m | ||||
|
深度变化,m | ||||
|
纵倾角变化,(°) | ||||
|
赠升降舵角的变化,(°) | ||||
|
飆升降舵角的变化,(°) | ||||
|
方向舵角的变化,(°) |
表B6侧推装置离靠码头试验结果表
艇舷号:............................................,试验日期:....................年....................月....................日
试验码头:........................................,码头水深:....................................m,停靠舷向;........................................
风向风力:........................................................,流速流向:........................................,停靠时首向角:................(°)
|
试 验 序 号 |
2 |
3 | ||
|
甩 |
侧推装置转速,r/nɪɪn | |||
|
尾 试 |
转首角速度,°∕s | |||
|
验 |
转首45。的时间,s | |||
|
解开尾缆时刻,s | ||||
|
离 |
启动侧推时刻,s 侧推装置转速,r∕min | |||
|
码 |
停止侧推时刻,s | |||
|
头 |
甩开艇尾角度,(°) | |||
|
试 |
解开首缆时刻,s | |||
|
验 |
启动倒车时刻,s 倒车转速,r∕min 艇首离开码头时刻,s | |||
|
进港后停车时首向角,(°) | ||||
|
倒车启动时刻,s | ||||
|
倒车转速.r∕min | ||||
|
靠码头试验 |
倒车停时刻,s 带首缆时刻,s 启动侧推时刻,s 停止侧推时刻,s 带上尾缆时刻,s | |||
表B7升速测量结果
艇舷号;............................................,试验日期;....................年—一...............月一...................0
试验海区: ...................................,水深...............................m,海水密度:…… ......... t∕m3
风向风力:........................................> 浪级: ........................... » 流向流速: ..................................
|
试 |
验 序 号 |
1 |
2 |
3 |
4 | |
|
试验深度,m | ||||||
|
初 |
试验航速,kn | |||||
|
始 状 |
赠升降舵角 | |||||
|
态 |
舰升降舵角,(。) | |||||
|
纵倾角,(。) | ||||||
|
航速,kr | ||||||
|
试 |
赠升降舵角,(°) | |||||
|
腮升降舵角,(°) | ||||||
|
验 |
快潜水舱注(排)水量,t | |||||
|
稳 |
调整水舱注(排)水量,t | |||||
|
定 |
纵倾角,(°) | |||||
|
状 |
艇的升沉速度V?,m/s | |||||
|
赭升降舵 2V√2¾,m∕s.° | ||||||
|
态 |
升速 |
艇升降舵 2昨/2为m∕s.° | ||||
|
剩余浮力 2V√2Q,m∕s.t | ||||||
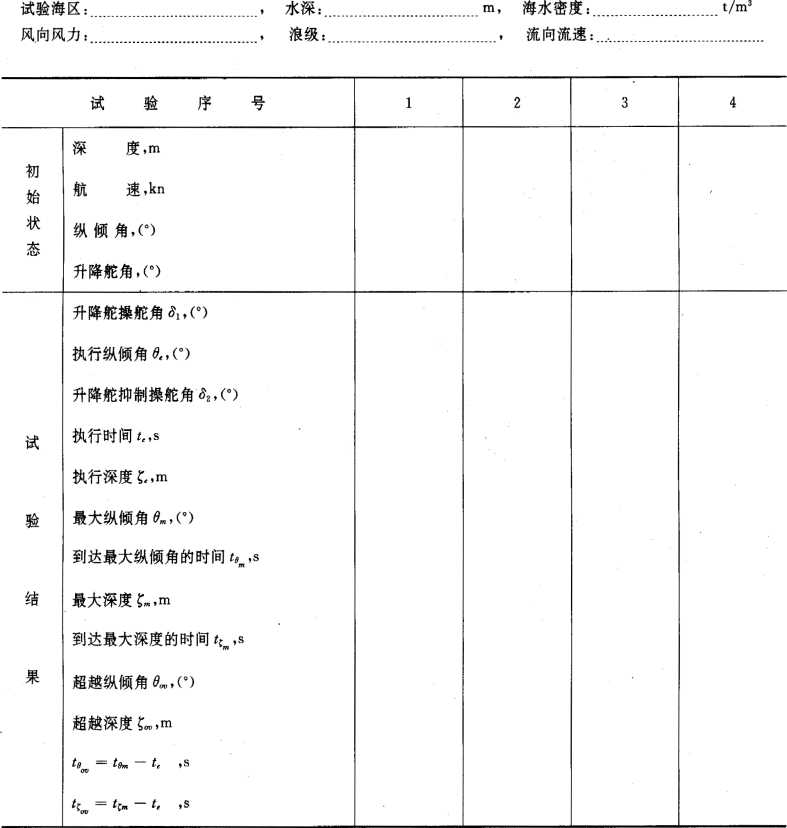
表B8 超越试验结果
艇舷号;............................................,试验日期:....................年一...................月一................…日
表B9变深度试验结果
艇舷号:............................................,试验日期: ..............一…年…一―....…―…月一…….....….…0
试验海区:......................................................................,水深:....................................m,海水密度:..… ........ t∕m3
风向风力」...............一…..…… ..........,浪级:........................................,流向流速:........................................
|
试 验 序 号 |
1 |
2 |
3 |
4 | |
|
初 |
深 度,m | ||||
|
始 状 |
航,速,kn | ||||
|
态 |
纵倾角,(。) | ||||
|
航速,kn | |||||
|
试 |
纵倾角,(。) | ||||
|
赠升降舵角,(°) | |||||
|
验 |
舰升降舵角,(。) | ||||
|
预定达到深度,m | |||||
|
状 |
实际达到深度,m | ||||
|
超越深度厶S,m | |||||
|
态 |
达到预定深度时间s | ||||
|
达到预定深度行进距离Sw,m | |||||
表BlO航向和深度保持试验结果
艇舷号:............................................,试验日期:….一.一年…一 ..........月―…….…—日
试验海区:........................................,水深:....................................m,海水密度:…… ..............……t∕π?
风向风力;一.....................................,浪级:一..................... , 流向流速:........................................
航行状态(正常航行、通气管航行或武器发射等):........................................
|
试 验 序 号 |
1 |
2 |
3 |
4 | ||
|
试验深度,m | ||||||
|
航 速,kn | ||||||
|
初始航向角,(°) | ||||||
|
方向舵0° |
首向角变化 (°) |
1 min 2min 3min ・ 4min 5min | ||||
|
人工操舵 或 自动操舵 |
首向角偏离,(°) 方向舵操舵频率,(min)"1 方向舵平均操舵角,(°) 深度偏离,m 纵倾角偏离,(°) 赠升降舵操舵频率,(min)T 艄升降舵平均操舵角,(。) 舰升降舵操舵频率,(min)-ɪ 胴升降舵平均操舵角,(°) | |||||
表BIl空间机动试验结果表
艇舷号:............................................,试验日期: ....................年....................月…… ............日
试验海区:........................................,水深:....................................m,海水密度'…………...............t∕m3
风向风力:一.................................. 浪级:..............:.....................—,流向流速:… .............................
|
试 验 序 号 |
1 |
2 |
3 |
4 | ||
|
初始深度,m | ||||||
|
初始直航速½),kn | ||||||
|
方向舵角步,(°) | ||||||
|
艄升降舵角沥,(°) | ||||||
|
艇升降舵角&,(°) |
- | |||||
|
稳定转艄角速度r,°∕s | ||||||
|
稳定运动航速V,kn | ||||||
|
稳定运动纵倾角们(°) | ||||||
|
稳定运动横倾角们(°) | ||||||
|
稳定回转半径R,m | ||||||
|
升速比%/。 | ||||||
|
升距∆ζ3eo. |
表B12平衡角测定结果表
艇舷号:............................................,试验日期:...................一年……. ...........月.…一 ...........日
试验海区:………..…. ...........一……,水深:..........…… ...........…..…m,海水密度: _________............t∕m3
风向风力:............................……...…,浪级:……:.................................,流向流速;…… .............................
|
试 |
验 序 号 |
1 |
2 |
3 |
4 | |
|
深度,m | ||||||
|
初 |
航速,K,kn | |||||
|
始 状 |
纵倾角%,(°) | |||||
|
态 |
韻升降舵角‰,e) | |||||
|
艇升降舵角舞,(°) | ||||||
|
深度,m | ||||||
|
试 |
航速Vj ,k∏ | |||||
|
验 状 |
平衡纵倾角们(。) | |||||
|
态 |
赠升降舵角δb,n | |||||
|
艇升降舵角s,,(°) |
表B13水动力系数测定结果表
|
艇舷号:..........................….….………, |
试验日期 |
年 |
……....…….月………..... |
……0 |
|
试验海区:.…… .........................—…, |
水深;............... |
_m,海水密度」… |
……...........―…t∕πι3 | |
|
风向风力:........................................, |
浪级:…… |
…….,流向流速*一… | ||
|
浮力调整水舱容积中心的纵向位置: |
= |
m |
首、尾纵倾平衡水舱的间距: =............................................m
|
试 验 序 号 |
1 |
2 |
3 |
4 | |
|
深度,m | |||||
|
初 |
航速K∙,kn |
f ' | |||
|
始 |
纵倾角仇,(°) | ||||
|
赠升降舵角‰,C) | |||||
|
状 |
幌升降舵角⅛,(0) | ||||
|
态 |
浮力调整水舱水量Q° ,∏? | ||||
|
纵倾平衡水舱水量m3 | |||||
|
深度,m | |||||
|
试 |
航速匕,kn | ||||
|
纵倾角幻(°) | |||||
|
验 |
麟升降舵角%,(。) | ||||
|
艇升降舵角%,(。) | |||||
|
状 |
浮力调整水舱排水*Qj,m3 | ||||
|
纵倾平衡水舱向首压水量PPm3 | |||||
|
态 |
水动力系数Z | ||||
|
水动力矩系数M | |||||
|
零升力系数彳" |
零力矩系数M'* | ||||
|
结 |
力对垂向速度导数Nw |
力矩对垂向速度导数肱板 | |||
|
果 |
力对巔升降舵角导数Z&' |
力矩对舗升降舵角导数M√ | |||
|
力对艇升降鸵角导数Z必 |
力矩对艇升降鸵角导数%’' | ||||
表B14纵倾力矩对角速度导数的测定结果表
艇舷号:……… ..................................,试验日期:............一…年一…… ...........月一,… ............B
试验海区:… .....................,水深:…………… ....................ɪn,海水密度:.....................….…t∕m3
风向风力:..................................……,浪级:............….…一.….… ............流向流速:.............................. 一….
|
试 验 序 号 |
1 |
2 | |
|
深 度,m | |||
|
初 |
航 速,kn | ||
|
始 状 |
纵倾角,(。) | ||
|
态 |
赠升降舵角,(。) | ||
|
舰升降舵角,(°) | |||
|
深度变化,m | |||
|
试 |
航 速V,kn | ||
|
验 |
解升降舵角学均幅值勿<,(°) | ||
|
税升降舵操舵周期τ,s | |||
|
结 |
平均纵倾角幅值Θλ,C) | ||
|
果 |
纵倾角滞后于舵角的相位角e,(°) | ||
|
纵倾力矩对角速度的导数M', | |||
表B15舵杆扭矩测定结果表
艇舷号:............................................,试验日期:....................年....................月....................0
试验海区:........................................,水深:_________________________...... ... m,海水密度:............................t∕m3
风向风力: ................................,浪级: .............................…—........流向流速:........................................
试验舵别:...............................................……., 计算常数 K...............................................
试验深度:........................................m,航 速:....................................kn,试验序号:..................
|
序号 |
舵角a (°) |
液压差匀 MPa |
扭矩M t ∙ m |
序号 |
舵角& (°) |
液压差今 MPa |
扭矩M t ∙ m |
|
a | |||||||
附加说明:
本标准由军船理论与实验归口组提岀。
本标准由七O二研究所归口。
本标准由七O二研究所负责起草。
本标准主要起草人:朱兴中、悸秋琴。
标准分享网WWW. bzfxw. Com免费下载