U 11
中国船舶工业总公司部标准
CB/z 190-96
潜艇实艇快速性试验方法
1996-09-03 发布
1997-04-01 实施
中国船舶工业总公司发布
CB/z 190-96 分类号:u 11 代替 CB/Z 190-82
1.1主题内容
本标准规定了潜艇在水面状态,通气管状态及水下状态的实艇快速性试验。
1.2适用范围
本标准适用于潜艇首制艇或改型艇快速性试验,后续艇和坞修艇的快速性试验可参照执行。
CB/Z 189-96水面舰船实船快速性试验方法。
本章无条文。
4-1潜艇装载状况
潜艇装载应处于设计的正常排水量或燃油超载排水量,误差不得大于1. 0% ,横倾角不大于0-5% , 尾倾误差应小于艇长的0.1%,不允许首倾。.
4.2艇体、附件和螺旋桨状况
要求整个艇体、附体和螺旋桨表面保持清洁光滑,一般出坞时间不大于两周,甲板和指择台上只安 装海军训练条令规定的突岀物。
通气管状态试验时,只允许升起海军训练条令规定的升降装置。
4.3测速区
4.3-1典型的水面测速区如图1所示。
中国船舶工业总公司1996-09-03批准
1997-04-01 实施
1
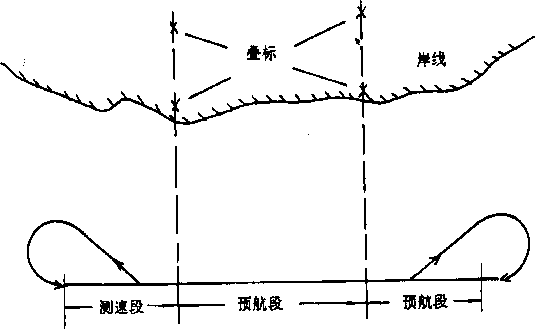
I 图1 测速段和预航段一般取1〜2 n mile。 测速线离岸距离:在可以清楚地观察叠标的前提下,尽可能远离岸线。
4- 3- 2 测速区应该海域宽广,避开航道、捕鱼区以及经常性的训练区域,整个海域要有充分的操艇余
地。
5∙ 3∙ 3测速区潮流要求变化平缓,测速线的方向应尽可能和潮流方向一致。 4∙3∙4水下及通气管状态试验时,测速区不应存在"温跃层”和"蜜跃层”。
4∙3∙5水面测速区的水深取公式⑴和公式⑵中的大者:..............................................................................
h > (2. 75∕g)K (1)
h>3∖∕BT ................................................... (2)
式中∙h ......水深,m;
T--吃水,m;
B--艇宽,m;
V—艇速,m/s;
g---重力加速度,m∕s2,取 g = 9. 81m∕s2ς,
4∙3∙6水下测速区的水深要求如下: a.下潜深度Al h1 ≥ 20m (小型潜艇); A1 ≥ 25m (中型潜艇); hl ≥ 30m (大型潜艇)。 b.龙骨下水深h2 h2 ≥ 20m (小型潜艇); A2 ≥ 30m (中型潜艇); h2 ≥ 65m (大型潜艇)。 考虑到龙骨至水面的距离,总的水深对小型潜艇应大于45m,对中型潜艇大于65m,对大型潜艇应 大于IlOmO
4∙3∙7通气管状态测速区的水深要求如下:
a∙下潜深度h1
AI ≤ 10m; ■
b∙龙骨下水深妫
Al ≥ 30m;
c∙总的深度对小型潜艇应大于40m,对中型潜艇应大于50m,对大型潜艇应大于55m0
4- 4气象和海况
能见度良好,风力不大于蒲氏风标3级,浪级不大于2级。
5- 1实施步骤
5∙1∙1倾斜试验和定重试潜试验
为了确保潜艇水下及通气管状态试验时的航行安全,试验前必须做过倾斜试验和试潜定重试验。
5-1-2通讯联络
试验前应协调各个试验项目,规定统一的口令,保证试验时通讯联系方便可靠。
5∙1∙3操艇要求
5∙1∙ 3-1测速段航行期间,潜艇罗经航向偏离不大于1。,垂直舵舵角不大于3。,水平舵舵角不大于5。, 螺旋桨转速的变化不大于lr∕min O
5.1. 3. 2水面状态回转时,舵角不大于15。;水下及通气管状态回转时,舵角不大于10。。
5.1. 3- 3水下及通气管状态试验时,潜深偏离不大于0∙ 5m,纵倾变化不大于I0O
5∙1∙3∙4水下状态试验时,在测速段以外的时间,应随时作倾差调整,以保证潜艇处于精确的均衡状 态。
S4 一试验工况........ ........ ...
5∙ 1∙ 4: 1水面及水下状态试验时,常规动力潜艇从最低稳定工况到额定工况应不少于5个试验点诽 常规动力潜艇可以酌情处理,但不得少于4个试验点。
5.1∙4∙ 2通气管状态试验时,取2〜3个试验点。
5∙1∙5水面及通气管状态试验
5∙1∙ 5-1测速试验必须在专门的测速区进行,潜艇的对地航速Vg由测速段距离以及潜艇通过该测速 段的时间计算而得。
在水面状态测速的同时,应该按照计程仪的使用条例,调整好计程仪,使计程仪的航速指示值VZ基 本上等于潜艇的对水航速Vw,供水下测速时使用。
5∙ 1-5.2每个工况应该做顺逆相间三个航次的试验,各个航次应该连续进行。
5∙1∙ 5. 3为了保证潜艇螺旋桨转速在测速段稳定,至少要有3min的预航时间。
5.1.5.4前一工况结束,潜艇离开叠标段后立即调整主机转速到下一工况,一经设定就不应变动。
5-1-6水下状态试验
5∙1∙6∙1潜艇的航速用经过调整好的计程仪测定。
5∙1∙ 6.2每个工况都要做顺逆两个航向的测试,各航次要连续进行。
5∙ 1∙6∙ 3潜艇以直航向航行(航向尽可能与流向一致),在转速稳定5min后,即可开始测速。根据计程 仪的指示读数,以及潜艇驶过事先设定的某段距离所需的时间,即可求出艇对水的航速。
5-1∙6∙ 4高速工况试验时,应随时测定龙骨下水深,密切注意深度和艇的纵倾变化情况,应急吹除系 统处于戒备状态。
5-1-7测量仪表
5-1-7-1测量航速用的计时秒表不少于3个,每小时误差不得大于Is。计时秒表须经国家计量单元检 定合格且在有效期内使用。
5∙1∙ 7. 2若采用全球卫星定位系统(DGPS)测试,参照CB/Z 189有关规定执行。
5∙1∙ 1- 3测量主机功率用的扭矩传感器和转速传感器及二次仪表,试验前必须按照有关标准进行标 定,转速传感器精度为± 0. 2% ,扭矩传感器精度为± 1. 0% ,尾轴材料的剪切弹性模数G可根据材料强 度大小取值,也可取样直接测出。总的测试系统精度不大于L5%.
5∙ 1-7.4若测量推力,应提供所用的一次仪表、二次仪表及尾轴材料的抗拉、压弹性模数E值,并给出 整个测量系统的精度。
5.2测量和记录项目
5-2.1记录艇的出坞日期及出坞后逗留的水域和时间。
5∙ 2.2记录艇体外表面涂料的种类,尽可能用仪器测量并记录艇体的粗糙度。
5-2-3 试验前分别记录螺旋桨正、反向盘车时扭矩仪的读数,取平均值作为轴功率计算时的零点;若 测量推力,也同时记录推力仪输岀读数,并取平均值作为推力计算时的零点。
5.2.4直接或取样测量并记录尾轴材料的抗扭剪切模数G和抗拉、压弹性模暈E;也可根据尾轴材料 的抗拉、压强度取值。建议:
高强度合金钢(抗拉、压强度为 4 X 106~7 X 106N∕cm2)取:G = 8. 21 X 106N∕cm∖E = 2.10 × 107N∕cm2o
普通船用钢取:G = 8.15 X 106N∕cm∖E = 2. 09 X 107N∕cm2o
试验报吿中应该注明所用的G、E值。
5∙2∙5 试验前后观察并记录潜艇自由漂浮状态时赭、舶、鮑处的两舷吃水,并根据吃水算出艇的实际 排水量。记录试验过程中燃油以及各种补给品的消耗量,以便核算试验时的排水量变化情况。
5- 2- 6按试验顺序记录各个航次的试验状态工况、时间和航向。
5- 2-7潜艇水面及通气管状态试验时,测艇速与测主机功率必须同步进行并记录。
5- 2.8潜艇水下状态试验时,当驶入事先设定好的测速距离后就开始测量主机功率及驶过该距离所 需的时间,并记录在已设计好的表格中。
5- 2- 9 分别用温度计、比重计、风速风向仪、测深仪及浪高仪测量并记录气温、水温、水密度、风速、风 向、水深、浪级及浪向。或者根据海图记录水深,凭经验目测海面的涌浪情况。
5-2-10观察潜艇在测速段航行期间的操舵(幅值、频度)、纵摇、横摇、潜深及偏航等情况供参考。
5-3测试数据修正和结果表达形式
5-3.1试验数据的修正
5-3-1-1南流修正
修正潮流对航速V的影响按公式(3): K=(* + 25*)∕4
式中、卩成“3 一分别为每个航次艇对地的实测航速值,kN.
对螺旋桨转速%、轴功率九和推力二分别按公式(4)〜(6)计算:
式中:%1、%2、%3--分别为每个航次螺旋桨的实测转速值,r/min;
Psl.Pa.P13——分别为每个航次主机的实测轴功率值,kW;
Tq、T,3——分别为每个航次螺旋桨的实测推力值,kN;
5. 3∙1∙2排水量修正
试验时的实际排水量和标准排水量相差不超过士 5.0%时,可以按海军系数法修正试验结果。 当轴功率不变,航速吗、转速%分别采用公式(7)和(8),修正:
VS = VaX (∆,∕∆s)^ ......................... *.......... (7)
ns = nst X(4/4)2/9 ............................................. (8)
式中:VM-- 实测航速,kn;
4
nst-实测转速,r∕mi∏;
4--实际排水量*t;
标准排水量,t;
当航速、转速不变,轴功率己、推力T,分别采用(9)、(10)修正:
式中M实测推力值,kN.
5∙3.1∙3水下状态试验计程仪测速的修正
'水下状态试验时,采用在水面测速时校正过的计程仪来指示潜艇的水下航速K,采用公式(11)修 正:
式中;VZ--kn;
a——修正系数,按表1选取。
表1
|
Fn |
0∙146 |
0・ 226 |
0,249 |
0.262 |
0∙ 302 |
0.319 |
|
a |
0. 9905 |
1. 0120 |
0. 9988 |
0. 9954 |
1.0040 |
1.0150 .,......................... |
表中Fn为佛汝德数
.. Fn = V7国
式"—臀,S'
1艇枝%
g— 重力加速度,g = 9. 81m∕s20
5- 3-1-4浅水失速修正
水面状态试验,当试验水深不合要求从而产生浅水失速时,按公式(12)修正:
SV/V = 0.1242[(Am∕h2) — 0. 05] + [1 — ʌ/tanh(gh/v2)] .................. (12)
(若Am∕h2 ≤ 0. 05,则第一项为零)
式中;V--航速,m/s;
Am--艇中截面积,m。
h--水深,m;
8V/V——相对失速;
g—-重力加速度,g = 9∙ 81m∕s20
其中第一项是回流效应修正项,第二项是浅水兴波修正项。按上式计算而得到的大、中型潜艇在不 同水深时的相对失速值可参见表2。
表2 '
|
水深 m |
10 |
15 |
20 |
30 |
40 |
> 50 |
|
帯/V中型潜艇 |
12.2 |
4.13 |
1.40 |
0.15 |
0.11 |
O |
|
义7卩大型潜艇 |
13.7 |
4.77 |
1.60 |
0.45 |
0. 06 |
O |
5.3-1.5浅潜深兴波阻力修正
浅潜深兴波阻力修正参见附录A(参考件)。
5-3-2结果表达形式
5∙3∙2∙1艇体、螺旋桨和动力装置要素填入表3。
5
5.3.2.2实艇试验的全部测量结果以及主要试验条件逐项填入表4。
5- 3- 2- 3对测量结果进行适当的处理和修正后,以完整的PS〜 2 〜VSynS ~虬关系曲线给岀实艇 快速性试验的最后结果。
表3艇体、螺旋桨、舵和动力装置要素
|
艇 号: |
制造厂: | ||||||
|
艇 体 概 况 |
总长L,m |
动 力 装 置 概 况 |
1-主机 额定功率PB kW 额定转速nε r/min 减速比i | ||||
|
最大宽度‰,m | |||||||
|
最大高度HnBIl ,m | |||||||
|
赠吃水Te,m | |||||||
|
舶吃水TM,m |
2.推进电机 额定功率PB kW 额定转速∏b r/min 减速比 i | ||||||
|
龌吃水TA ,m | |||||||
|
方形系数CB | |||||||
|
梭形系数Cr | |||||||
|
排水量 |
水面∆,t |
3-经济航行电机 额定功率PB kW 额定转速nB r/min 减速比i | |||||
|
水下厶丄 | |||||||
|
湿表面积 |
水面S,m2 | ||||||
|
水下S,r∏2 | |||||||
|
艇 型 |
尾 轴 |
外径D Cm |
内径D Cm | ||||
|
材料 | |||||||
|
螺 旋 桨 概 况 |
叶片数Z |
导 管 概 况 |
导管长度Z,m | ||||
|
直径D,m |
导管长径比Z∕∙D | ||||||
|
盘面比AiIAiI |
导管拱度比TZD | ||||||
|
螺距比F/D |
导管厚度比 | ||||||
|
O. IR 螺距比(FAD)(I,R |
导管扩张比<⅛______________ | ||||||
|
O. IR叶片弦长Co∙wi,m |
导管进口面比α | ||||||
|
O- IR叶片厚度«0.7Ktm |
导管出口面比戶 | ||||||
|
浸深比hJD |
导管尾角r,(°) | ||||||
|
"毂径比d/D ' |
桨和导管相对位置LJD | ||||||
|
剖面形状 |
剖面形状 | ||||||
|
侧斜度凯(。) | |||||||
|
舵 概 况 |
舵类型 |
其 它 附 体 | |||||
|
舵尺度(ZXjB),m | |||||||
|
舵剖面形状 | |||||||
|
舵最大厚度4mx ,ɪn | |||||||
表4快速性试验报告表
|
艇名.一.…一一…… |
….. 水深一.……... |
..… 韻吃水:左............ |
.….•…排水量:试验前.…… |
|
试验日期.…........... |
.一 潜深............... |
______ 右............ |
试验后________ |
|
出坞日期…― |
一… 海况............. |
…一 舰吃水,左............ |
………初始纵倾•,…............... |
|
试验地点............... |
..... 风向风力............. |
…右........... |
.........初始横倾…二............. |
|
试验状态............... |
一… 海水温度…一.......... |
,…. 平均吃水:左.一…… |
.....….记录人员.…................ |
|
海水密度一........... |
..... 右............ |
|
序 号 |
时 间 |
工 况 |
航 向 |
跑标时间 |
叠标距离 |
对地航速 |
对水航速 |
左 机 |
右 机 |
平均转速 |
总轴功率 |
总 推 力 | |||||||||||||
|
一 |
二 |
三 |
一平均 |
转速 |
轴功率 |
推力 |
转速 |
轴功率 |
推力 | ||||||||||||||||
|
MS |
MS |
MS |
MS |
S nmile |
Vg kn |
VW kn |
nsL r/min |
kW |
~T∑~ t/kN |
r/min |
PSr kW |
TSr ~ t/kN |
nSG r/min |
PSA kW |
TSA t/kN | ||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 | |
|
1 | |||||||||||||||||||||||||
|
2 | |||||||||||||||||||||||||
|
3 | |||||||||||||||||||||||||
|
4 | |||||||||||||||||||||||||
|
5 | |||||||||||||||||||||||||
|
6 | |||||||||||||||||||||||||
|
7 | |||||||||||||||||||||||||
|
8 | |||||||||||||||||||||||||
|
9 | |||||||||||||||||||||||||
|
10 | |||||||||||||||||||||||||
|
11 | |||||||||||||||||||||||||
|
12 | |||||||||||||||||||||||||
|
13 | |||||||||||||||||||||||||
|
14 | |||||||||||||||||||||||||
|
15 | |||||||||||||||||||||||||
附录A 浅潜深兴波阻力修正 (参考件)
水下状态试验,当下潜深度不合要求时,由于潜艇运动,将在水面产生兴波,从而产生兴波阻力,其 值和潜艇的相对潜深4/Z、佛汝德数Fn以及船型有关。它常用无因次系数CW按公式(AI)表示。
CW = Rw∕CpV2Ω/2) .......................................... (AI)
式中:~∙兴波阻力,kg;
V--航速,m/s;
q--水下全湿表面积,m%
P---水密度,kg ∙ s2∕m40
CW的变化规律是:当Fn数很大或很小时,Cw都很小:Fn = O. 50 ~ 0. 60时,CW有峰值岀现;随着 何/乙的增大,Cw将迅速减小。
CW可以由模型试验或理论计算求得,根据某回转体(Z√B = 8. 5,CP = 0. 67)水下兴波阻力理论计 算的结果,并结合现有的大、中型潜艇经常性的相对潜深值(中型潜艇hl∕L = 0. 260;大型潜艇hl∕L = 0. 300) ,Cw的理论值可见表Al,此表可供修正实艇试验结果时参考。
表Al
|
中型潜艇 ML= 0.260 |
Fn |
0. 280 〜0. 350 |
< 0. 280 | ||
|
CW × IO3 |
0.05 |
0 | |||
|
大型潜艇 h1∕L = 0. 300 |
Fn |
0.410 |
0.390 |
0.360 |
V 0. 360 |
|
CW X IO3 |
0. 200 |
0.150 |
0. 050 |
0 | |
本标准由军船理论与实验归口组提出。
本标准由七O二研究所归口。
本标准由七O二研究所负责起草。
本标准主要起草人:黄廷良周开传
8