
ICS 13.110 J 09
GB/T 19671—2005
Safety Of machinery—Two-hand COntrOI devices —FUnCtiOnaI aspects and design PrinCiPIeS
(ISO 13851:2002,MOD)
2005-02-21 发布
2005-07-01 实施
GB/T 19671—2005
-⅝,χlll- —1—
刖 R
本标准是根据ISO 13851:2002«机械安全双手操纵装置功能状况及设计原则》制定的。本标 准与ISO 13851的一致性程度为修改采用。
本标准釆用翻译法起草,并对ISO 13851做了编辑性修改,主要差异如下:
——“本国际标准”一词改为“本标准”;
——按照汉语习惯对一些编排格式进行了修改;
--取消了国际标准的前言,ISO 13851前言只是对标准起草和审批程序的说明,其存在与否对本 标准的理解和使用没有影响;
—规范性引用文件的导语按GB/T 1. 1—2000的格式编写;
——将引用的有关国际、国外标准改为对应的国家标准;
——取消了附录C,因ISO 13851附录C为有关参考资料名称,取消这一部分对理解和使用标准无 影响;
——GB/T 15706.2-1995没有附录A这一部分,而ISO/TR 12100-2: 1992附录A的内容与 GB/T 15706.2—1995 有关规定基本相同,对 ISo 13851 要求符合 ISO/TR 12100-2 = 1992 附 录A规定的内容,本标准均以GB/T 15706. 2—1995相对应条款替代。
本标准的附录A为规范性附录;附录B为资料性附录。
本标准由全国机械安全标准化技术委员会提出并归口。
本标准起草单位:机械科学研究院。
本标准主要起草人:陈建民、宁燕、李勤、聂北刚、路增林、王金武。
双手操纵装置是一种安全装置(安全元件),它通过在特定位置安设操纵控制装置的方法为操作者 提供一种防止在危险状态下抵达危险区的防护措施。对于手持机械来说,应考虑到危险区不是固定的。
双手操纵装置作为适当的安全装置,应按照GB/T 15706. 1和GB/T 16856的规定、依据由设计 者、标准制定者和其他人做出的风险评价来进行选择。
本标准3. 1中所给出的双手操纵装置的定义优先于GB/T 15706. I-1995的3. 23. 4中给出的 定义。
在某些装置中,使动装置(见GB/T 15706. 1—1995中3. 23. 2)和/或止一动装置(见GB/T 15706. 1→995中3. 23. 3)可遵循本标准中双手操纵装置的定义。此外,还有一些特殊的控制装置,例 如机器人示教用的悬吊式操纵器和某些吊车控制装置等,都需要使用双手,这些控制装置也遵循本标准 中双手操纵装置的定义。
GB/T 19671—2005
本标准规定了双手操纵装置的安全要求和输出信号对输入信号的依赖性。
本标准描述了双手操纵装置达到安全要求的主要特性,同时给岀了三种类型功能特性的组合。本 标准不适用于预计用作使动装置、止一动操作装置或专用控制装置的装置。
本标准未规定双手操纵装置应与哪些机器一起使用,未规定应使用哪种类型的双手操纵装置,也未 规定双手操纵装置和危险区之间的距离(见9.8)o
本标准基于风险评价给出了双手操纵装置在设计和选择上的要求与指南,包括对其评价、失效的预 防和故障排除。标准也给出了对具有可编程电子系统的双手操纵装置的设计要求和选择指南。
本标准适用于与使用能源无关的所有双手操纵装置,包括:
—是或者不是机器整体部分的双手操纵装置;
——由一个或多个分立元件组成的双手操纵装置。
下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有 的修改单〈不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究 是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。
GB 5226.1—2002机械安全 机械电气设备 第1部分:通用技术条件(IEC 60204-1 = 2000, IDT)
GB/T 15706. 1—1995机械安全基本概念与设计通则第1部分:基本术语、方法学
(GB/T 15706. 1—1995 eqv ISO/TR 12100-1 = 1992)
GB/T 15706. 2-1995机械安全 基本概念与设计通则 第2部分:技术原则与规范
(GB/T 15706.2—1995 eqv ISO/TR 12100-2: 1992)
GB/T 16855. 1-1997机械安全控制系统有关安全部件第1部分:设计通则(GB/T 16855. 1—1997 eqv PREN 954-1 : 1994)
GB/T 16856—1997 机械安全 风险评价的原则(GB/T 16856—1997 eqv PREN 1050: 1994)
ISO 13855 = 2002机械安全与人体部位接近速度有关的防护设施的定位
EN 894-3机械安全 设计显示器与操纵器的人类工效学要求 第3部分:操纵器
下列术语和定义适用于本标准。
3. 1
双手操纵装置 two-hand COntroI device
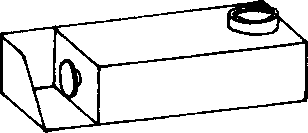
一种需要用双手同时操纵,以便在启动和维持机器某种运行的同时,针对存在的危险情况下,为操 纵人员提供防护的装置(见图I)O
3.2
输入信号input Signal
用手对操纵控制器件施加的外部操纵信号(见图1)。
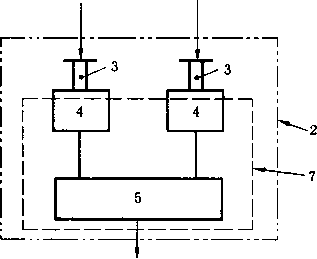
1— 输入信号;
2— —双手操纵装置;
3— —操纵控制器件;
4— ^信号转换器;
5— —信号处理器*
6— —输出信号;
7— —逻辑单元。
3. 3
操纵控制器件 COntrOI actuating device
双手操纵装置的一个器件,该器件感受单手的输入信号并将其传递给信号转换器(见图Do 3.4
同时操纵 SimUltaneOUS actuation
在同一时间周期内同时持续操纵两个操纵控制器件,而不考虑两个输入信号的起始之间时间的间 隔(见图2)0
3.5
同步操纵 SynChrOnOUS actuation
同时操纵的一种特例。两个输入信号的起始时间间隔小于或等于0.5 s(见图3)o
3.6
信号转换器 Signal ConVerter
双手操纵装置的一个器件,该器件从一个操纵控制器件上接收一个输入信号,并将其传送到和(或) 转换成信号处理器可以接受的形式(见图D0
3.7
信号处理器 SignaI PrOCeSSOr
双手操纵装置的一个部件,该部件接收两个输入信号而产生一个输出信号(见图I)O
3.8
输出信号OUtPUt Signal
由双手操纵装置产生的、反馈到被控机械上的信号。该信号是基于一对输入信号而产生的(见图I)O 3.9
响应时间 response time
操纵控制器件从释放到输出信号中断之间的间隔时间(见9.8)。
3. 10
移动式双手操纵装置 InObiIe two-hand COntrOI devices
能够移动的双手操纵装置,可以用于与所控机器危险区相关的多处确定位置上。
GB/T 19671—2005
表1规定了三种类型的双手操纵装置,并针对本标准中每一类型双手操纵装置给出了功能特性和 最低程度的安全要求。所有双手操纵装置都应符合GB/T 15706及GB 5226.1的规定。
表1双手操纵装置类型及其最低安全要求
|
要 求 |
条 款 |
类 型 | ||||
|
I |
∏ |
In | ||||
|
A |
B |
C | ||||
|
使用双手(同时操纵) |
5. 1 |
× |
X |
× |
X |
X |
|
输入信号与输岀信号间的关系 |
5.2 |
× |
X |
× |
× |
X |
|
输出信号中断 |
5. 3 |
× |
X |
X |
X |
× |
|
意外操作预防 |
5.4 |
X |
× |
X |
× |
X |
|
不当使用的预防 |
5. 5 |
X |
X |
X |
× |
X |
|
输出信号的再激发 |
5. 6 |
a |
X |
X |
X |
X |
|
同步操纵 |
5.7 |
× |
× |
X | ||
|
采用 1 类(见 GB/T 16855.1) |
6.2 |
X |
× | |||
|
采用 3 类(见 GB/T 16855.1) |
6.3 |
X |
X | |||
|
采用 4 类(见 GB/T 16855. 1) |
6.4 |
X | ||||
|
a 选择类型I时,见8, 6。__ | ||||||
双手操纵装置的类型(见表1)选用与设计取决于:
--存在的危险;
——风险评价;
——采用技术的经验;
——对每种应用应规定的其他因素〔如对意外操作、不当使用(见第8章)以及其他情况的预防(见 GB/T 15706. 2—1995 中第 3 章
注:风险评价指南可以在GB/T 15706.1找到,GB∕T 16856里给出了详细的指南。
表1中各类双手操纵装置应具有5. 1至5. 7所描述的安全功能特性。
双手操纵装置的设计应使得操作者应在同一时间段内使用双手,每一个操纵控制器件用一只手,同 时操作双手操纵装置,即为同时操纵。这种操作与两个输入信号中任一信号激发间的时间延迟无关(见 图2)。
施加到两个操纵控制器件每个上的输入信号应一起激发,且只有施加两个输入信号,来自双手操纵 装置的输出信号才能够保持。输出信号的形式(如通道数、脉冲、波形等)可以根据不同情况的设计要求 而改变,并应该总是能由机器控制线路认同和识别的单一输出信号。
释放一个或两个操纵控制器件,都应导致输出信号中断。
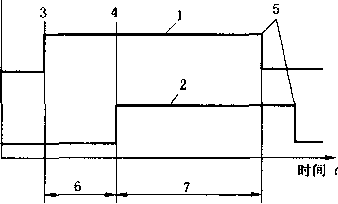
1 第一只手的信号;
2— —第二只手的信号;
3— —第一个输入信号激发;
4— —第二个输入信号激发;
5— —输入信号中断;
6 同时操纵时不确定的时间差3
7——同时操纵的时间段。
操纵控制器件的意外操作几率应被降低到最小限度(见第8章和第9章)。
双手操纵装置的防护作用不应轻易失效(见第8章和第9章)。
只有在两个操纵控制器件都被释放之后,输出信号才有可能再被激发。
5. 7.1输出信号应在两个操纵控制器件的作用时间间隔小于或等于0.5 s时产生(见图3)。
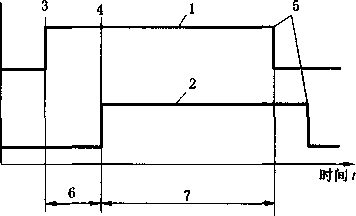
1— —第一只手的信号;
2— —第二只手的信号;
3 第一个输入信号激发;
4 第二个输入信号激发;
5— —输入信号中断;
6— ——同步操纵时,时间拖延不大于0.5 Si
7 同时操纵的时间段。
5. 7. 2机械式双手操纵装置应在满足两个操纵控制器件行程的特定空间要求时才能产生输出信号。
5. 7.3如果两个操纵控制器件动作不同步,不应产生输出信号,这种情况下应先释放两个操纵控制器 件并再次施加两个输入信号。
注:在使用两个或多个双手操纵装置来操作一台机器的场合,仅在每个双手操纵装置中需要同步操纵,而在各个双 手操纵装置之间并不需要同步操纵。
GB/T 19671—2005
双手操纵装置的部件在失效情况下的行为表现应符合GB/T 16855. 1-1997中所选用类别的规定 要求(见表2)。
双手操纵装置的控制类别不应低于与机器控制系统相关部件的相应安全控制类别(见GB/T 16855.1)O
附录B描述了双手操纵装置的型式与GB/T 16855. 1 — 1997相关类别的关系。
6.2釆用1类
I型和InA型双手操纵装置应采用至少符合GB/T 16855.1-1997中1类的、经验证是成熟的安 全元件和安全原则。
注:为了达到高可靠性和高可操作性,建议所有型式的双手操纵装置均釆用经验证的安全元件和安全原则。
6.3釆用3类
6.3. 1当风险评价表明单项故障安全要求时,II型和∏IB型双手操纵装置应符合GB/T 16855. 1— 1997中3类6. 3. 2和6.3.3及6. 3. 4的规定。
6. 3.2双手操纵装置中的单项故障不应导致安全功能的丧失。
6. 3.3出现单项故障时,双手操纵装置不应转变成单手操纵装置。
6. 3.4出现单项故障时,不应产生输出信号。
注:上述要求并不意味着所有故障都会被探测到。因此,未发现的各种故障积累后可以导致安全功能的丧失和双 手操纵装置的意外输岀。
6.4采用4类
6.4. 1当风险评价表明自动监控要求时,DIC型双手操纵装置应符合GB/T 16855. 1-1997中的4类 和 6.3、6.4.2、6.4.3 和 6. 4. 4 的规定。
6. 4.2单项故障应在安全功能实施时前或下一步操作前被监测到。
6. 4.3单项故障发生后,双手操纵装置应不能再次激发输出信号。
6.4.4在单项故障发生时产生的输出信号可以持续下去,但当一个或两个输入信号中断时,输出信号 就应中断。如果不能发现单项故障,那么,各种故障的组合不应导致安全功能的丧失。
当通过采用可编程电子系统(PES)来达到双手操纵装置的功能特性时,PES的硬件与软件的安全 要求应根据风险评价进行验证。
PES的软件和硬件应有保证措施,以确保设计所要求的功能特性不受干扰。
InB型和InC型双手操纵装置的输出信号不应单独通过一个单通道的PES产生和传送到机器控 制系统上去。
按特定应用场合的风险评价要求,对双手操纵装置的操纵控制器件的设计和配置,应使双手操纵装 置的防护作用不至于因不当使用而失效,同时应使意外操作的可能性也降至最低程度。
因用单手或一只手与身体其他部位和(或)合并利用一些简单辅助物件的可能性都会造成所谓的不 当使用,所有这些情况均应加以考虑,以避免进入危险状态。意外操作(如因操作者的衣物引起)也应按 同样方式加以考虑。
简单的辅助物件可能是桥状物件、绳索、钢尺等。在选用异向操纵、盖板、挡板等时,均应使不当使 用的可能性减至最小。由两个人同时操作的双手操纵装置而造成的两手空闲的可能性,可以通过利用 同步操纵的方法加以避免.
注:全面预防不当使用是不可能的.
8. 2至8. 6说明了一些有可能造成各种使用不当的行为方式,同时给出了一些预防措施。应考虑 到的不当使用的方式取决于双手操纵装置的设计、操纵工况、双手操纵装置的装设与定位方法以及规定 的安全距离要求等。
8. 7给出了一些防止意外操作的方式方法。
所列预防措施可以单独使用或组合使用才能满足本标准的要求。10. 5给出了适用于最常用设计 的试验程序。对于双手操纵装置的其他设计来说,这些试验程序有些可釆用,有些不可采用。在这种情 况下,就应针对双手操纵装置设计的那些可能的使用和(或)误用进行危险分析和风险评价,并且提出适 宜的防护措施以满足本标准的要求。
应提供防止使用单手造成不当使用的措施,合适的预防措施举例如下:
——将操纵控制器件至少相隔260 mm(内缘距离):
—在操纵控制器件之间设置一块或多块挡板或架高一块区域,使两个操纵控制器件在挡板周围 260 mɪn的范围内相互隔离。
应具有防止使用同臂手和肘造成不当使用的措施,合适的预防措施示例如下:
——操纵控制器件之间的内缘至少相距550 mm,考虑到人类工效学的原因,这个距离不宜超过 600 mm;
——在两个操纵控制器件之间设置一块或多块挡板或架高一块区域进行预防时,应设计得使同臂 的肘部和指尖不能同时触到操纵控制器件;
——采用盖板防护措施时,其设计应使操纵控制器件不能用肘部操作;
——釆用具有不同类型和(或)不同操作方向的操纵控制器件。
如果由于使用了前臂和(或)肘部而产生危险,而手到危险处的距离又小于所要求的安全距离时,应 采取因使用前臂和(或)肘部造成不当使用的预防措施。
合适的措施是采用盖板和(或)挡套,并将其设计得使操纵控制器件不能用前臂和(或)肘部进行 操作。
使用身体某一部位与单手并用造成不当使用的预防措施,举例如下:
—将两个操纵控制器件安置在一个平面或近似水平的面上,该平面至少要高出地面或通道地面 1 IOO mɪn,以防止用臀部操作。
—— 当两个操纵控制器件安装在一个垂直或近乎垂直的竖直面上时,操纵控制器件周围应有防护 挡套。
——设计防护盖板或护板,应使操纵控制器件无法用单手和身体的其他任何部位同时操作。
应具有因一个操纵控制器件被锁定造成不当使用的预防措施。
这种因一个操纵控制器件被锁定造成的不当使用将导致双手操纵装置变成了一个单手操纵装置, 并可导致锁定的操纵装置产生一个恒定的输入信号,其结果是双手操纵装置的输出信号可以仅由单手 来产生。预防这种不当使用的合适措施是:
——为了防止用单手又进一步操作而再一次激发输出信号,在双手操纵装置的设计中应包括再激 发的特性(见5. 6);
GB/T 19671—2005
——为了防止用单手的首次启动,双手操纵装置在设计中应包括同步操纵的特性(见5.7)。
注:考虑选用I型双手操纵装置时,重要的一点是要认真地进行风险评价,以确定同步操作的特性和再激发特性是 否可以在设计中被省略。
8.7意外操作
双手操纵装置被意外操作的可能性应被减至最小程度。
8. 2至8. 6中列出的措施有助于将意外操作降到最小程度。防止意外操纵的其他合适措施的示例 如下:
——对于机械式操纵控制器件,要求根据所需要的力和行程慎重地进行操作;
——对于非机械式的操纵控制器件(如光电式装置、电容式装置),需要有能保证慎重操作的敏感度 水平。
为了防止防护功能失效和意外操作的发生,有时在人类工效学原则(见EN894-3)和双手操纵装置 的设计之间会产生冲突(例如,开口尺寸与某些特定操作需带手套之间的矛盾)。
为达到安全要求所采取的手段和措施需要在下述两方面进行权衡:
——遵循人类工效学原则的需求;
——提供防止不当使用和意外操作措施的需求。
二者的权衡应以为特定风险提供足够的安全为主。
双手操纵装置零部件的选择、安装和连接应使其能承受预定的操作应力,并满足与这种应力(例如 就开关容量与开关频率而论)有关的相关标准的要求以及涉及预定环境影响(如振动、冲击、温度、外来 物、湿度、油及电磁场等)的相关标准的要求。
9.3护罩
9.3. 1护罩及其安装件的设计应能承受预定的操作应力和环境应力。
9. 3.2边角、棱缘等应倒圆或削平,以避免对人造成伤害。
9.3.3可移除或开启的盖板和零部件的构造应该是只有借助工具才能拆除或打开。紧固件应是栓留 类型的。
9. 3-4当护壳装在台架上时,台架上应有与护壳和地面牢靠固定的设施。
9. 3-5护壳的安装和固定位置应使操作者在危险情况下释放操纵装置后不能触及危险区(见9. 8和 12.2)0
9.3.6如果操纵控制器件的护壳是可调式的,那么就应给其配设锁定位置的设施。对移动式双手操纵 装置的规定见9. 7。
9-4. 1操纵控制器件的选择、设计、布置和安装不应使其在被操作时引起操作者过度疲劳(例如,不方 便的操作姿势、不适当的移动、过大的操纵力都会导致这种结果),见EN894-3。
9.4.2操纵控制器件不应为红色的。
注:对于电动式双手操纵装置,见GB 5226. 1—2002。
9.4.3操纵控制器件不应与任何其他零部件发生任何挤压或剪切。
9. 4. 4双手操纵装置、相关的机器控制系统及其内部连接应按GB/T 16855. 1规定的相应类别设计。
因意外作用(如跌落加压、意外撞击或冲击加载等)双手操纵装置而产生的一些可预见的力不应引 起输出信号。
9. 6. 1双手操纵装置的设计应能防止在正常使用由它所控制的移动式和(或)便携式手持机械时产生 的意外操作。
9.6.2双手操纵装置的两个操纵控制器件设计上需要各自分立并要采用不同的作用方式,以防产生启 动机器危险运行的输入信号。
注L两个操纵控制器件釆用操纵柄分立的防护措施不能满足这种要求,除非其操作方式不同。
注2:在两个操纵控制器件之一上预设一个自动开锁设施,可以提供较高的防护水平。
9. 7.1移动式双手操纵装置的操纵器及其支撑护罩,在正常使用时应是固定的(见GB/T 15706. 2-1995)。
注:可以通过包封大质量物体或釆用其他适当的措施实现。
9.7.2移动式双手操纵装置应具有防止操作时移动的措施。
注:可以通过包封大质量物体、使用可锁轮盘或某种其他适当措施来实现。
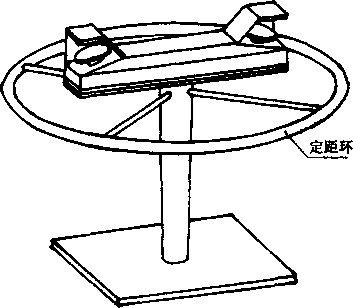
9. 7.3应备有用于保持和检査操纵控制器件与危险区之间所要求安全距离的器材(见9. 8和12.2) (例如采用一个定距环的方式见图4)。
9. 7.4釆用9. 2和9.4.4中提供的设计方案时,管路、电缆和连接件都应加以防护,以免受损。
9.8安全距离
为了计算操纵控制器件和危险区之间所需的安全距离(参考ISO 13855:2002中的最小距离),应考 虑下列因素:
——手和(或)手臂的速度(见ISO 13855);
——双手操纵装置的形状及布置;
——双手操纵装置的响应时间;
——随着双手操纵装置输出信号的中断,用来停止机器或消除危险所需的最长时间;
——机器的预定用途(见GB/T 15706. 1—1995);
--相关的C类标准。
10检验
10.1检验的一般要求
通过风险评价提出的,对双手操纵装置所规定的要求,应通过设计理论评估和实际试验来加以验 证。表2中给出了检验方法的汇总条目。这些方法可用于检验双手操纵装置的安全要求,也包括其功 能特性。
GB/T 19671—2005
表2检验方法
|
条款 |
安全要求 |
方 法 |
备 注 | ||
|
目测检查 |
性能检验 |
测量 | |||
|
一般检验 | |||||
|
9.2 |
操作条件和环境影响 |
X |
X |
采用相关标准 | |
|
9. 3 |
有关护罩的要求 |
X |
X |
通过型式试验 | |
|
9.4 |
操纵控制器件的选择、设计和安装 |
X |
X |
× | |
|
9.5 |
由加速冲击引起的意外输出信号 |
X |
X | ||
|
9.6 |
意外控制操纵 |
X |
X |
针对移动式或便携式手持机械 | |
|
9.7 |
稳定性 |
× |
针对移动式双手操纵装置 | ||
|
9. 8 |
响应时间 |
X | |||
|
11 |
标志 |
X | |||
|
功能特性 | |||||
|
5. 1 |
使用双手 |
X |
X | ||
|
5.2 |
输入和(或)输出信号关系 |
× | |||
|
5. 3 |
输出信号中断 |
X | |||
|
5,4 |
意外操作 |
× |
× |
× |
釆用第8章的方法 |
|
5. 5 |
不当使用 |
X |
X |
X |
釆用10.5 |
|
5. 6 |
再激发 |
X |
再启动检查 | ||
|
5.7 |
同步操作控制类别 |
X |
X | ||
|
6.2 |
1类 |
X |
通过标识 | ||
|
6. 3 |
3类 |
X |
X |
故障模拟(见10.3) | |
|
6.4 |
4类 |
× |
X |
故障模拟(见10.3) | |
检验程序仅针对双手操纵装置本身,并未考虑与其连接的机械控制系统可能产生的影响。应该模 拟设计双手操纵装置所需要的、来自机器控制系统的反馈信号。
检验程序取决于双手操纵装置的设计、型式、工作条件、连接与定位方法以及规定的安全距离要求 等等。这些检验程序包括目测检验、性能检査、测量和理论评估。本标准给出了一些有关试验程序的指 南,特别是在有关不当使用的预防方面,但未规定详细的试验方法。
设计者和(或)制造者应安排双手操纵装置的检验和(或)型式试验,以证明该装置符合设计规范。 这些规范的要求可在标准(如GB 5226. 1—2002)中给出,在没有标准的情况下也可由设计者给出。
10.2目测检査
目测检查,就是仅仅通过观查来验证规定型式双手操纵装置所需具有的特性,并应适用于表2中所 列的检测项目。
用作实验验证的任何元件,都应由制造者特殊标识。
10.3性能检验
性能检验用来检验规定型式的双手操纵装置所要求的操作特性。故障模拟基于对双手操纵装置设计 的故障分析。对于U型、πib型及me型装置来说,它包括模拟所有与安全有关的故障(见表1和表2)。
10.4测・
测量是用来检验设计者所规定的一些指标、二进制信号、机械特性、时间等,以满足本标准的要求。
10.5失效的预防
附录A中给出了有关预防失效的设计测量试验方法和相关数据。
对大多数普通型设计来说,应使用部分或全部测量试验(见第8章),因为有些测量试验包含在另一 些测量试验之中,也有一些是补充性的试验,所以双手操纵装置的预定使用和形状要表明附录A中的 哪一种测量试验是必要的。
这些试验的组合是用来防止仅因使用单手而造成的不当使用,同时也可用来防止因一只手与肘部、 膝盖、臀部、大腿及腹部并用而引起的不当使用。
11. 1 标志应符合GB/T 15706.2—1995中5.4的规定。
11.2符合本标准,且又不属于一台机器整体部分的双手操纵装置应清晰而永久性地标明下述详细 内容:
——制造者和(或)有责任供方的名称和地址;
—制造者的模式或类型标记;
——制造者的产品系列号和制造年份;
——与第4章和表1相一致的双手操纵装置的型式以及本标准的代号和顺序号;
示例:「GB/T 19671 InC 型
——按3. 9中所定义的双手操纵装置的响应时间;
— 电动式双手操纵装置要标明相应的额定信息(见GB 5226.1-2002);
——气动、机械式和其他非电动双手操纵装置要标明工作压力和(或)其他相关信息。
11.3如果双手操纵装置由两个或多个分立单元组成,那么,至少要有一个单元应按11. 2中的要求标 识。这些单元中的每一个都应被标识,使其能被辨认出是属于同一双手操纵装置的部件。
11.4在双手操纵装置已构成机器整体的一部分,且又符合本标准规定的情况下,机器上至少应标明其 所属型式和本标准的代号和顺序号。有关双手操纵装置的其他须知和技术数据应在机器的操作说明书 中给出。
注:标志可标在主机的铭牌上或操纵控制器件旁。
11.5为了便于保养和(或)维护,必要时双手操纵装置的元器件应能被标识。
应符合GB/T 15706. 2中5. 5的规定。
有关双手操纵装置在安装、使用和维护修理方面的信息应由制造者或其授权的代理商以中文提供 (见 GB/T 15706. 2—1995 中第 5 章)。
信息可以以图样、图表、表格和(或)文字的形式提供。
12.2安装说明
除非双手操纵装置构成机器的组成部分,否则就应给出下列信息:
——双手操纵装置的外形尺寸;
——安装、检验、维修等所需的空间;
——安装的详细说明;
——如何测定所需安全距离的说明(见9. 8);
—响应时间值;
——所要求性能,其中包括GB/T 16855. 1 -1997中规定的选用类别的指南以便于双手操纵装置 和机器控制系统有关安全的部件之间正确配合与连接;
GB/T 19671—2005
—— 电源线和内部连线(如电缆、刚性或柔性管路及其推荐的布线)的尺寸与形式;
——保护装置(如熔丝、安全阀等)的详细说明;
——初始启动程序指令;
——调整和设定的说明;
——检验双手操纵装置与机器控制系统相关部件处于正确操作状态的试验程序;
—有关预期使用限制的详细说明;
——防止可预见误用措施的详细说明。
12.3使用说明
应以清楚、明确的语言给出能使双手操纵装置正确、安全使用的说明;
可在适当的地方使用照片、图表、符号和图形。
使用说明应给出检验正确运行的和辨别工作不正常的信息。
12.4维护说明
维护说明应当包括:
—对维护和维修所必要的全部信息(在适当地方说明书应附有图样和线路图),
——作为某种维护和(或)维修规范一部分的适当的安全说明;
--系统维护的规范;
—零配件清单扌
——与图表、附图和描述相一致的双手操纵装置各部件的清楚名称。
咐录A
(规范性附录) 预防失效的设计测■试验和相关数据
A. 1总则
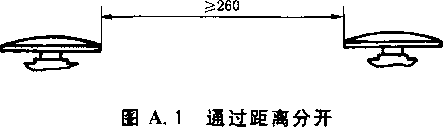
A. 2到A. 7的测量试验是10.5中要求的试验,以检验第8章所要求的尺寸。图A. 1到图A. 12 是正文中给出的有关预防不当使用的原理的图解,但未给岀设计双手操纵装置所需的细节。
A.2预防使用单手造成的不当使用(见8.2)
A. 2. 1以等于或大于260 mm的距离分开两个操纵控制器件(见图A.l)0
A. 2.2对于采用一块或多块护板,或者一块架高的区域将两操纵控制器件分隔开的结构,设计的检验 方法是:用一条260 mm长的绳索测量两个操纵控制器件,要求绳的两端不能触到两个操纵控制器件(见 图 A. 2)。
A.2.3对于采用不同方向的环形护套将操纵控制器件分隔开的结构,设计的检验方法是:用一条
260 mm长的绳索测量两个操纵控制器件,要求绳的两端不能触到两个操纵控制器件(见图A.3)o
图A.3通过设置不同方向的环形护套分开
A. 3. 1以等于或大于550 Tnm的距离分开两操纵控制器件(见图A. 4) O
A. 3.2对于采用一块或多块护板或通过架高一块区域,将两操纵控制器件分隔开的结构,设计的检验 方法是:通过用一个由直径不大于5 mm、长300 mm的刚性棒与一•段250 mm的绳索相连构成的测量 工具测量,要求工具两端不能同时触到两个操纵控制器件。刚性棒代表前臂,绳索代表手,这个工具应
GB/T 19671—2005
⅞550
通过距离分开
1 ---绳索,250 tnm 长;
2 --刚性棒,300 mm长。
图A.5利用护板分开
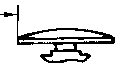
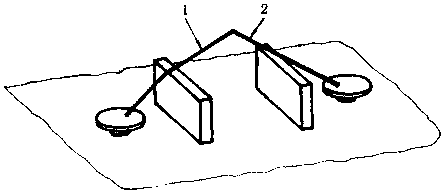
A.3.3利用护板将两操纵控制器件分开,以限制从操作位置的侧面和背面接近操纵控制器件。设计 的方法是,使操纵控制器件不能被一个代表肘部的试验锥顶部从操作位置的侧面触发操纵控制器件(见 图A.6)。试验锥的尺寸应符合图A. 7示出的数值。
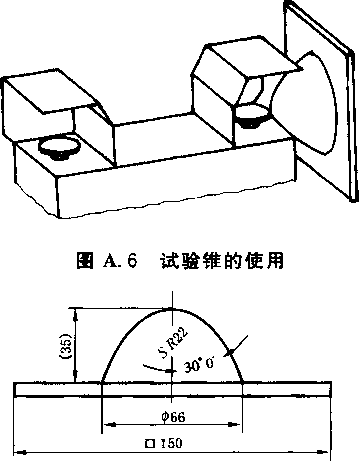
图A. 7试验锥的尺寸(mm)
A. 3.4型式和(或)操作方向不同的操纵控制器件(见图A.8和图A.9)。
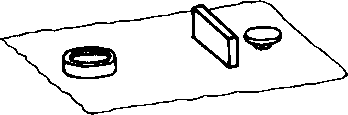
图A.8利用环形护套和护板分开
对于图A. 8所示的结构,检测方法是:釆用绳索、刚性棒(见图A. 5)和用于护套的试验锥(见图A. 6 和图A.7)。
对于图A. 9所示的结构,检测方法是:采用绳索、刚性棒(见图A. 5)和用于护套与护板的试验锥 (见图A.6和图A.7)。
护板的设计使操纵控制器件不能用前臂和(或)肘部进行操作(见图A. IO)O
对于图A. IO所示的结构,检测方法是:使用试验锥(见图A. 6和图A.7)。
图A. 10利用护板分开
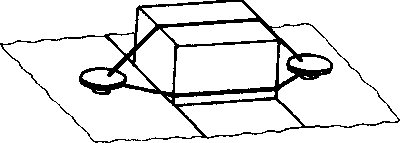
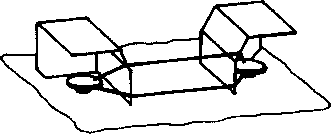
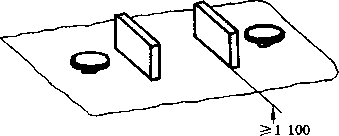
A.5. 1在高于进口地面至少1 Ioomm的水平面或近似水平面上方布置操纵控制器件(见图A.ll)0
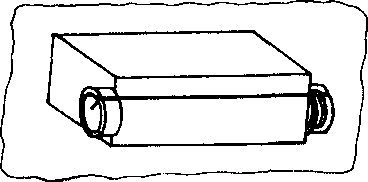
A. 5.2在一个竖直或近似竖直的面上,采用环形护套和(或)护板的方法布置操纵控制器件(见图A.9 和 A.12)o
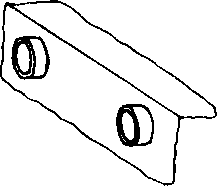
对于图A. 12所示的结构,检测方法是:采用绳索、刚性棒(见图A. 5)和适用于护套的试验锥(见图
A. 6 和图 A. 7)o
A. 5.3盖板和(或)挡板(见图A. 10)
GB/T 19671—2005
附录B
(资料性附录)
各类双手操纵装置采用的控制系统有关安全部件类别(按照GB/T 16855. 1 — 1997)
|
类别 |
要 求 |
双手操纵装置 |
|
B |
控制系统有关安全部件和(或)其防护装置以及它们的元件都应根据有关标准设计选择装 配和组合,以使其能承受预期的影响 |
..一 |
|
1 |
应釆用B类的要求 使用经过验证的安全元件和安全原则 |
I 和InA |
|
2 |
应采用B类的要求和经过验证的安全原则 应通过机器控制系统以适当的时间间隔检查安全功能 注:适当的时间间隔取决于机器的类型和应用场合 | |
|
3 |
应采用B类的要求和使用经过验证的安全原则 控制系统应设计得: ——控制中的单项故障应不导致安全功能丧失,和 ——只要合理可行,査明单项故障 |
II 和 DIB |
|
4 |
应采用B类的要求和使用经过验证的安全原则 控制系统应设计得: ——控制中的单项故障应不导致安全功能丧失,和 ——在下一个有关安全功能指令发出时或发出之前査明单项故障。如果不可能査明,那么 故障的积累不应导致安全功能丧失 |
me |