/是否
已充分减小风险M (充分的风险减小: 、见第6章)/
ICS 13.110 J 09
WMr⅛ι∣r∕
GB/T 15706—2012/1SO 12100:2010
代替 GB T 15706. 1—2007.GB T 15706. 2-2007.GB T 16856.1—2008
Safety Of machinery—GeneraI PrinCiPIeS for design— RiSk assessment and risk reduction
(ISO 12100:2010.IDT)
2012-11-05 发布
2013-03-01 实施
中华人民共和国
国家标准
机械安全设计通则
风险评估与风险减小
GB T 15706-2012 ISO 12100=201'
中国标准出版社出版发行 北京市朝阳区和平里西街甲2号(K ' >13) 北京市西城区三里河北街16号(IOOo45)
网址 WWW. spc. net. Cn
总编室 s(010)64275323 发行中心 √-l'>.-.1780235
读者服务部:(010)68523946
中国标准出版社秦皇岛印刷厂印剧 各地新华书店经销
*
开本880X1230 1/16 印张4.25 字数124千字 2013年3月第一版2013年3月第一次印剧
*
书号:155066 • 1-46155 定价 57. 00 元
如有印装差错由本社发行中心调换 版权专有侵权必究 举报电话:(010)68510107
6. 3. 5 补充保护措施........................................................ —
6. 4. 3 信号和警告装置.................................................—...........-
附录C (资料性附录)本标准专用术语与表述的中文-英文索弓’........
..・...・...・・•・•・・•・・・・•・・・・・・• •・•・•・・・・••・・・・・・・・・•・•• •・•・•・•・• ■■■ ¢)1
本标准按照GB/T 1. 1-2009给出的规则起草。
本标准代替GB/T 15706.1-2007«机械安全 基本概念与设计通则 第1部分:基本术语和方法》、 GB/T 15706. 2—2007«机械安全 基本概念与设计通则 第2部分:技术原则》和GB/T 16856. 1—2008 《机械安全 风险评价 第1部分:原则》。本标准整合了 GB/T 15706.1—2007.GB/T 15706. 2—2007和 GB/T 16856.1—2008 的技术内容,与 GB/T 15706. 1—2007.GB/T 15706. 2—2007 和 GB/T 16856. 1— 2008相比,除编辑性修改外主要技术变化如下:
——将标准名称改为“机械安全设计通则风险评估与风险减小”;
一将术语“可维护性(机器的)”改为“维修性”(见3. 3, GB/T 15706. 1-2007的3.3);
-将术语“遗留风险”改为“剰余风险”(见3. 13,GB/T 15706. 1—2007的3. 12和GB/T 16856. 1— 2008 的 3. Il)J
一将术语“风险评估”改为“风险估计”(见3. 14,GB/T 15706. 1—2007的3. 15和GB/T 16856. 1-2008 的 3.15);
一将术语“风险评定”改为“风险评价”(见3. 16,GB/T 15706. 1—2007的3. 16和GB/T 16856. 1-2008 的 3.16)i
-将术语“风险评价”改为“风险评估”(见3. 17,GB/T 15706. 1—2007的3. 13和GB/T 16856. 1-2008 的 3.14);
——将术语“可预见的误用”改为“可合理预见的误用”(见3. 24,GB/T 15706. 1-2007的3. 23和 GB/T 16856. 1—2008 的 3. 10);
将术语“使动装置”改为“使能装置”(见3. 28. 2.GB/T 15706. 1—2007的3. 26.2〉;
-将术语“止-动控制装置”改为“保持-运行控制装置”(见3. 28. 3, GB/T 15706. 1-2007的 3. 26. 3);
——将术语“故障”改为“失灵”(见3. 37,GB/T 16856. 1—2008的3.8)o
本标准使用翻译法等同采用ISO 12100 = 2010«机械安全 设计通则 风险评估与风险减小》(英 文版)。
本标准等同翻译ISO 12100:2010.为便于使用,本标准做了下列编辑性修改:
-按照GB/T 1.1-2009的要求修改了范围中条款的表述,增加了标准的适用范围:
删除了附录C中丽法文和德文索引.增加了中文索引,并按照中文拼音重新排序。
本标准由全国机械安全标准化技术委员会(SAC/TC 208)提出并归口。
本标准起草单位:中机生产力促进中心、深圳市华测检测技术股份有限公司、徐州重型机械有限公 司、南京林业大学光机电仪工程研究所、欧姆龙自动化(中国)有限公司、皮尔磁工业自动化(上海)有限 公司、西门子(中国)有限公司上海分公司、广西柳工机械股份有限公司、罗克韦尔自动化(中国)有限公 司、山东省产品质量监督检验研究院、中联认证中心、国家机床质量监督检验中心。
本标准主要起草人:李勤、居荣华、朱平、史先信、李立言、王学智、林建荣、张晓飞、富锐、刘治永、 李建友、程红兵、黄之炯、洪立文、徐凯、褚卫中、罗广、王己妍、赵钦志、徐周、马立强、陈能玉、周加彦、 王立、李志宏、孙华山、华错、黄敏、张维、赵茂程。
本标准所代替标准的历次版本发布情况为:
——GB/T 15706. 1—1995∖GB∕T 15706. 1—2007?
——GB/T 15706.2—1995 ,GB∕T 15706. 2—2007 5
——GB/T 16856—1997;
——GB/T 16856. 1—2008.
本标准的主要目的是为设计者提供总体框架和决策指南.使机械在其设计出在预定 使用范围内具备安全性的机器。本标准也为标准制定者提供一种策略∙.-∙≡ = ∑-≡i¾适当的B类标 准与C类标准。
机械安全的概念考虑了在风险已被充分减小后,机器在其生命周豪KKV宾干定潟能的能力。
本标准是机械安全标准体系中所有标准的基础标准,机械安全标专上系三三匸二下:
A类标准(基础安全标准),给出适用于所有机械的基本栈念.注:-亨底可一殷特征。
一B类标准(通用安全标准),涉及机械的一种安全特征或使用¾ 安全装置;
• Bl类.特定的安全特征(如安全距离、表面温度、噪声,了竺:
• B2类,安全装置(如双手操控装置、联锁装置、压敏装≡.>Γ½責行准
一 C类标准(机械安全标准).对一种特定的机器或一组机器襯定二:三冬矣安全要求的标准。
本标准属于A类标准。
当C类标准的内容与本标准或者其他B类标准的一个或多个技代理定不一致时.以C类标准的技 术规定为准。
建议将本标准纳入培训课程或手册中,以便设计者掌握基本术⅛⅛⅛≡S⅞7÷方法=
起草本标准时已尽可能参考了 GB/T 20000. 4的内容。
1范围
本标准规定了机械设计过程中用于实现机械安全的基本术语、原则和方法,以及风险评估与风险减 小的原则.以帮助设计者实现机械安全的目标。这些原则基于与机械有关的设计、使用、事件、事故和风 险的知识和经验。本标准还规定了在机器生命周期的相关阶段内进行识别危险、估计和评价风险的程 序,消除危险或充分减小风险的程序.以及记录和验证风险评估与风险减小程序的指南。
本标准适用于3. 1定义的机械.
本标准不涉及对家畜、财产或环境的风险和/或危害。本标准也可作为制定B类或C类安全标准 的基础。
注1:附录B以单独的表格分别给岀了危险、危险状态和危险事件的示例.以阐明这些概念并在危险识别过程中对 设计者起到帮助作用.
注2:在GB/T 16856. 2-2008中给出了许多在实际应用中针对风险评估的每个阶段的方法。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 5226. 1-2008机械电气安全 机械电气设备 第1部分:通用技术条件(IEC 60204-1 :2005, IDT)
3术语和定义
下列术语和定义适用于本文件。
3. 1
机械 machinery
机器 machine
由若干个零、部件连接构成并具有特定应用目的的组合,其中至少有一个零、部件是可运动的•并且 配备或预定配备动力系统。
注1:术语“机械”也包括为了同一应用目的.将其安排、控制得像一台完整机器那样发挥它们功能的若干台机器的 组合.
注2:附录A给出了机器的一般图解表示。
3.2
可靠性 reliability
机器、机器的零、部件或设备在规定的条件下和规定的期限内执行规定的功能且不出现故障的 能力。
3.3
维修性 maintainability
按照规定的做法并采用规定的方法采取必要措施(维修)的情况下,机器保持在预定使用条件下能 够实现其功能的状态或恢复至此状态的能力。
3.4
易用性 USabiIity
由于特性或特征等原因使机器功能容易被理解,从而使机器具备容易使用的能力。
3.5
伤害harm
对健康产生的生理上的损伤或危害。
3.6
危险 hazard
潜在的伤害源。
注1: “危险'‘一词可由其起源(例如
和电气危险),或其潜在
质(例如:电击危险、切割危险、中毒
注2:本定义中的危险包
一在机器的预源用
质用 W-.∙⅛终存在的危险(例如:危险运动部件的运动,¾ 晶危/扁如:爆炸、意外启动引起的挤压危险、破裂引起的喷射
产生的电弧、不利于健
3.7
相关危险
已识别出
斥身存在白 5章所述的 标准和C学
重大危险'
Iicant
已识别为
注:本术语;
佥,需要设
.准和C类标
危险事件
能够造成伤害*伸
、程可Z 短时间的.也可以是长时间的
3. 10
危险状态 hazardous SntoatiOn
指人员暴露于至少具有一神的环软1
伤害
3. 11
危险区 hazard ZOne
危险区 danger ZOne
使人员暴露于危险的机械内部和/或其周围的任何空间。
3. 12
风险 risk
伤害发生的概率与伤害严重程度的组合。
3. 13
剩余风险 residual risk
采取保护措施之后仍然存在的风险。
注1:本标准区分了:
设计者采取保护措施后的剩余风险;
已采取所有的保护措施后仍然存在的剩余风险。
注2:也可见图2.
3. 14
风险估计 risk estimation
确定伤害可能达到的严重程度和伤害发生的概率。
3. 15
风险分析 risk analysis
机器限制的确定、危险识别和风险估计的组合。
3. 16
风险评价 risk evaluation
以风险分析为基础,判断是歹、风险的目标。
3. 17
风险评估 risk as^κmenU^^
包括风险分析俗内的全过程。
求并考虑了现有技
兜分减小
IOteCtiVe
:减小的,
织措施:您 番;培训)。官
队员
置;使用个
inhere!ItIy Safe design measure
通过改变机糖题饌£特性.而不是使用防护装置或保护装置来电興Iiyi赧小与危险相关的 风险的保护措施。ʌ/
注:见 6.2. /
3.21
安全防护 SafegUarding
使用安全防护装置保护人员的保护措施,歴 通过本质安全设计措施无法充分减小的风险。
注:见6.3。
3. 22
使用信息 information for USe
由信息载体(如文本、文字、标记、信号、符号、图表)组成的保护措施,可单独或组合使用这些载体向 使用者传递信息。
注:见6.4。
3.23
预定使用 intended USe
按照使用说明书提供的信息使用机器。
3.24
可合理预见的误用 reasonably foreseeable IniSUSe
不是按设计者预定的方法而是按照常理可预见的人类习惯来使用机器。
3.25
任务task
在机器生命周期内,一人或多人在机器上或机器附近所进行的特定活动。
3.26
安全防护装置SafegUard
防护装置或保护装置。
3.27
防护装置guard
设计为机器的组成部分,用于提供保护的物理屏障。
注1:防护装置可以:
单独使用。对于活动式防护装置.只有“闭合”时才有效;对于固定式防护装置,只有处于“牢固的固定就 位”才有效。
与带或不带防护锁定的联锁装置结合使用。在这种情况下,无论防护装置处于什么位置都能起到防护 作用。
注2:根据防护装置的结构,可称作外壳、护罩、盖、屏、门和封闭式防护装置.
注3:防护装置类型的术语在3. 27. 1〜3. 27. 6中定义。防护装置的类型及其要求也可见6. 3.3.2和GB T 8196.
3.27. 1
固定式防护装置fixed guard
以一定方式(如采用螺钉、螺母、焊接)固定的,只能使用工具或破坏其固定方式才能打开或拆除的 防护装置。
3.27.2
活动式防护装置InOVabIe guard
不使用工具就能打开的防护装置。
3. 27. 3
可调式防护装置adjustable guard
整体或者部分可调的固定式或活动式防护装置。
3. 27.4
联锁防护装置interlOqkiiIggUard
与联锁装置联用的防护'装置,同机器控制系统一起实现以下功能:
在防护装置关闭前,其“遮蔽”的危险的机器功能不能执行;
一在危险机器功能运行时.如果打开防护装置.则发岀停机指令;
-在防护装置关闭后,防护装置“遮蔽”的危险的机器功能可以运行。防护装置本身的关年K会 启动危险机器功能。
注:GB/T 18831给出了详细规定。
3. 27. 5
带防护锁定的联锁防护装置interlocking guard With guard IOCking
与联锁装置、防护锁定装置联用的防护装置.同机器控制系统一起实现以下功能:
——在防护装置关闭和锁定前.其“遮蔽”的危险的机器功能不能够执行;
在防护装置“遮蔽”的危险的机器功能所产生的风险消失之前,防护装置保持关闭和锁定我去: 一在防护装置关闭和锁定后,被防护装置“遮蔽”的危险的机器功能可以运行。防护装置挙耳冬 关闭和锁定不会启动危险机器功能。
注:GB/T 18831给出了详细的规定。
3. 27. 6
带启动功能的联锁防护装置 iι∏erlocking guard With a Start function
带控制功能的防护装置COntrOl guard
特殊联锁防护装置.一旦其到达关闭位置•便发岀触发机器危险功能的命令,无需使用单独的启动 控制。
注:6. 3. 3. 2. 5给岀了关于使用条件的详细规定。
3.28
保护装置 PrOteCtiVe device
防护装置以外的安全防护装置。
注:3. 28.1-3. 28.9给出了保护装置的示例.
3.28. 1
联锁装置 interlocking device
联锁 interlock
用于防止危险机器功能在特定条件下(通常是指只要防护装置未关闭)运行的机械、电气或者其他 类型的装置。
3.28.2
使能装置 enabling device
与启动控制一起使用并且只有连续操动时才能使机器运行的附加手动操作装置。
3. 28. 3
保持-运行控制装置 hold-to-run COntrOI device
只有在手动控制器(执行器)动作时才能触发并保持机器功能的控制装置。
3.28.4
双手操纵装置 two-hand COntrOl device
至少需要双手同时操作才能启动和保持危险机器功能的控制装置.以此为该装置的操作人员提供 一种保护措施。
注:GB/T 19671给出了详细的规定。
3.28.5
敏感保护设备 SenSitiVe PrOteCtiVe equipment
SPE
用于探测人体或人体局部,并向控制系统发出正确信号以降低被探测人员风险的设备。
注:当人体或人体局部超出'预定范围.如逬入危险区一(触发)或在预定区域内检测到有人存在(存在感应)•或在 以上两种情况均发生时.敏感保护设备能够发出信号.
3. 28. 6
有源光电保护装置 active OPto-electronic PrOteCtiVe device
AOPD
通过光电发射元件和接收元件完成感应功能的装置,可探测特定区域内由于不透光物体出现引起 的该装置内光线的中断。
注:IEC 61496给出了详细的规定.
3.28.7
机械抑制装置 mechanical restraint device
在机构中引入了能靠其自身强度防止危险运动的机械障碍(如楔、轴、撑杆、销)的装置。
3.28. 8
限制装置 Illnitmg device
防止机器或危险机器状态超过设计限度(如空间限度、压力限度、荷载力矩限度等)的装置。
3.28.9
有限运动控制装置 Iimited movement COntrOl device
与机器控制系统一起作用.使得单次操动只允许机器元件做有限运动的控制装置。
3.29
阻挡装置 impeding device
物理障碍物(低位屏障、栏杆等)。其设置不能阻碍人员进入危险区•但能通过设置障碍物阻挡自由 岀入,减小进入危险区的概率。
3. 30
安全功能 Safety function
失效后会立即造成风险增加的机器功能。
3.31
意外启动 UneXPeCted start
非正常启动 uninten<
Startd
产生风险的启动
注1:其产生的原因射例妬J
由于埋
由于/
部失效或外部因素对控制系统的影响导致的启动指令
产V启动指令;
'用的
M牛受到内部 [循环正常次 k安全防护间 9670—20為
种况下,事故
泉产生的力
产品不能完成
的状态。预防性维护或其他计划性活动或因城乏轮
5情况除外。
ElEV 191-05-OIJ
注1:故障通常是产品
失妓•但即使失效未发生.故障也可能存在 RWaUltr‰∣⅛½≡ IEV 191-05-01 给彎∣>⅛
注3:实际中•术语“故障(fault)
3. 34
失效 failure
产品完成要求功能能力的中断C 注1:失效后,产品处于故障状态。
注2: “失效”与“故障”的区别在于.失效是一次事件.故障是一种状态, 注3:这里定义的“失效不适用于仅由软件构成的产品。
[IEV 191-04-01] 3. 35
共因失效 COmmOn CaUSe failure
由单一事件引发的不同产品的失效,这些失效不互为因果,
注:共因失效不宜与共模失效相混淆。
LlEV 191-04-23]
3. 36
共模失效 COmmon mode failure
以相同故障模式为特征的产品失效。
注:由于共模失效可能由不同原因引起.因此不宜将共模失效与共因失效混淆。
ElEV 191-04-24]
3. 37
失灵 malfunction
不能执行预定功能的机器故障。
注:示例见5.4中的b)2)β
3. 38
紧急状态 emergency SitUatiOn^ 需要立即终止或避免的危扁,成
注:紧急状态:
一可发生在机 可能是由J丿
常i∣∕确(例如由于人员的交互作用或受外界影 S备件失灵或失效.
有操作和功能:
ιergency
.正在发生
存在
对机
了详细规
排放值
将机器产生吨放Ww噪声、振动、有害物质、辐射)进行量化后的数值。 注L排放值属孔帔性蚤、息的一部分,是进行风险评价的基础数据。 ,
注2:不能将术语••咨0噸
暴露程度的量化.暴露
3. 42
可比较的排放数据 COmParatiVe emission data
从同类机器上采集到的用作比较的一组排放值数据。
注:关于噪声的比较•见GB/T 22156。
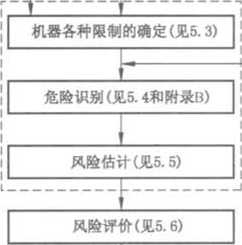
4风险评估和风险减小的策略
为了完成风险评估和风险减小,设计者应按下列顺序依次釆取措施(见图1):
a) 确定机器的各种限制.包括预定使用和任何可合理预见的误用;
b) 识别危险及其伴随的危险状态;
C)对每一种识别出的危险和危险状态进行风险估计;
d)评价风险并决定是否需要减小风险;
e)采取保护措施消除危险或减小危险伴随的风险。 措施a)至d)与风险评估相关.e)与风险减小相关。
---- 开始
/是否
已充分减小风险M (充分的风险减小: 、见第6章)/
根据第5章进行风险评估
应针对每种使用条件下的每种危险和危险状态, 分别进行风险减小的迭代过程
是
文件(见第7章)
结束
在迭代过程的每一步:进行风险估计、风险评价, 并在可行时进行风险比较
否
'用初始风险评估结果回答初次问题。
图1风险减小过程迭代三步法的图示
风险评估是以系统方法对与机械有关的风险进行分析和评价的一系列逻辑步骤。
必要时.风险评估之后需要进行风险减小。为了尽可能通过采取保护措施消除危险或充分减小风 险.有必要重复进行该过程。
假如机器上存在危险且不采取保护措施•则迟早会造成伤害。附录B给出了危险的示例-
保护措施是设计者和使用者根据图2所采取的措施的组合。在设计阶段采取的措施优于在使用阶 段由使用者采取的措施•而且通常更有效。
使用者輸入 h
风险评估
(基于机器的規定限制和预定使用)
由设汁者釆取的保护措施(见图1)
第1步:本质安全设计措施
第2步:安全防护和补充保护措施
第3步:使用信息“
•在机器上
—警告标记、信号:
——报警装置
•使用手册中

使用者采取的保护措施'
包括根据设计者提供的使用信息所
釆取的措施
•组织措施
—安全工作程序:
--监督;
—工作许可制度
釆用所有 保护措施 后的剩余 风险
-88888888888888
•使用附加安全防护装置'
•使用个体防护装备
•培训等
•提供合适的使用信息是设计者从设计角度减小风险的一个步骤•但其相关的保护措施只有在使用者实施后才能 发挥作用。
b用户输入是指设计者从预定使用机器的一般或特殊用户群体得到的信息,
,使用者釆用的各种保护措施是没有层次之分的。这些保护措施不在本标准范围之内。
d这类装置用于机器预定使用没有预见的特殊工艺,或者设计者不能控制的特殊安装条件。
图2通过设计减小风险的过程
为了最大程度的减小风险.应考虑下述四种因素。图1中的流程图表示了本章规定的策略。过程 本身是迭代的,并且为了达到减小风险的目的•应充分利用现有技术连续数次应用该过程。实施该过程 时•应按下列优先次序考虑这四种因素:
——机器在生命周期所有阶段内的安全;
——机器执行其功能的能力;
一机器的易用性;
— 制造、使用和拆卸机器的成本。
注1:对这些原则的最佳应用需要掌握机器的使用、事故历史和健康记录、可用的风险减小技术以及有关机器使用 的法律体制方面的知识。
注2:当技术发展后岀现了风险更低的等效机器设计.则在特定时间内可接受的机器设计可能不再合理。
5风险评估
5. 1概述
信
段的描述;
险的
能是适
合,只冃
制的确定(见5.3);
评僚(见5.6)
顷风险评
昔助于对tl
效数据8、
。因此.在
对风险评
断困
狭得
!是.定
:到可获
,计
B性的
风险评估包括(见 —风险分
2)
3)
-风
风险4 这些: 注:当
限 应按照
1):
估人员资源有
1)
2)
5.2风险节
b)
机械的
I)机械整
ii) 设计图样或
iii) 所要求的能源及步
类似机械的先前设计方面的文件;
可获得的机械使用信息。
法规、标准及其他适用的文件:
1)
2)
3)
4)
使用经验:
1)
2)
3)
4)
适用法规:
相关标准; 相关技术规范; 相关安全数据表。
现有的或类似机械的任何事故、事件或故障历史;
由排放物(噪声、振动、粉尘、烟雾等)、使用的化学品或机械加工物料等所引起的损害健 康的历史记录;
3)用户关于类似机器的经验,并尽可能与潜在用户进行信息交流。
注:一次已发生并导致伤害的事件可认为是一次••事故”。相反.一次已发生但没有导致伤害的事件,可认为 是一次“未遂事故”或••危险事件
d)有关人类工效学的原则:
应随着设计的发展或机器的修改更新信息。
只要能获取不同类型机械相关的类似危险状态中的危险环境和事故环境的足够信息,在上述类似 危险状态之间进行比较通常是可能的。
注:在缺乏事故历史记录的情况下,不宜釆用少量事故或严重程度低的事故作为推测出低风险的根据。
只要确信其适用性,数据库、手册、实验室或制造商技术说明书中的数据可用于定量分析。在文件
风险评估从 给出的机械限;
中应指明这些数据的不确定性(见第7:
5.3机械限制的确定
5.3. 1概述
5. 3. 2 使
d)
使用
a)
b)
制
力等)
W3、.
虬
Im
能力
家用);
日预足使
机器运行
年龄、优
业用、非
列使用者
作人员;
*人员或
艾
员
安全规程的
预期用
同
般*众。
和产品。
人员使用机械
1)
2)
3)
3)
4)
"勺确定开始.考虑机械生命周期的所有阶段。
:个完整过程中机器或系列机器的特征和性能、相关的
见的与机械有关危险的其他人员•包括:
危险的人员.如邻近机械的操作人员;
:味Z根据5. 3. 2到5. 3.5
不太 基本不了 如果无法获得b)中的 数据)。
念但非常了解现场安全规程、准行
勺人员,如管理人员;
者包括儿童在内的一般公众。 的一般信息(如适当的人体测量
5.3.3空间限制
应考虑以下几个方面:
a) 运动范围;
b) 人机交互的空间要求,如运行和维修期间;
C)人员交互方式,例如“人机”界面;
d) “机器-动力源”接口。
5.3.4时间限制
应考虑以下几个方面:
a)考虑机器的预定使用和可合理预见的误用时.机械和/或机器某些组件(如工具、易损的部件、
机电组件)的寿命限制;
b)推荐的维修保养时间间隔。
5. 3.5 其他限制
其他限制的示例包括:
a) 被加工物料的特性;
b) 符合清洁水平要求的保养;
C)环境——推荐的最低和最高温度.机器是否能在室内或室外、干燥或潮湿气候中运行.是否能 在太阳直射条件下运行.是否能耐受粉尘和潮湿环境等。
5.4危险识别
在确定机械限制后.任何机械风险评估的基本步骤是系统识别在机器生命周期所有阶段可合理预 见的危险(永久性危险和意外突发危险)、危险状态和/或危险事件。机器生命周期的阶段包括:
——运输、装配和安装;
--试运转;
——使用;
一拆卸、停用以及报废。
只有当危险已经被识别后才能采取措施消除危险或减小风险。为了实现危险识别,有必要识别机 器完成的动作和与其相互作用的操作人员执行的任务,同时考虑包括不同的部件、机器的机构或功能, 待加工物料以及使用环境。
设计者识别危险时应考虑以下因素:
a)机器生命周期内人与机器的相互作用
任务识别宜考虑上面列出的机器生命周期内所有阶段的所有相关任务。任务识别还宜考虑但 并不限于下面的任务类型:
一设定;
——测试:
—示教/编程;
——过程/工具转换;
--启动;
•所有的运行模式;
-机器进料;
从机器上取下产品;
——停机;
--急停;
——由卡滞或锁定到恢复运行;
—非计划停机后的重新启动;
一故障查找/故障排除(操作者干预);
一清洁和保养;
预防性维护;
——校正性维护。
应识别所有与各种任务相关的可合理预见的危险、危险状态或危险事件。附录B给出了危 险、危险状态和危险事件的示例。目前已有几种可用于系统识别危险的方法。也可见 GB/T 16856. 2—2008 0
另外,应识别与任务不直接相关的可合理预见的危险、危险状态或危险事件。
示例:地震、雷电、过大的冰雪载荷、噪声、机械断裂、液压软管爆裂。
b)机器的可能状态
D机器执行预定功能(机器正常运转);
2)由于各种原因,机器不能执行预定功能(即失灵),这些原因包括:
——被加工材料或工件的性能或尺寸变化;
——机器的一个(或多个)部件或辅助装置失效;
——外部干扰(如冲击、振动、电磁干扰);
一设计错误或缺陷(如软件错误);
--动力源扰动;
——环境条件(如损坏的工作地面)。
C)非预期的操作者条件反射行为或机器可合理预见的误用
示例包括:
——操作者对机器失去控制(特别是手持式或移动式机器);
——机器使用过程中发生失灵、事故或失效时,人员的条件反射行为;
——精神不集中或粗心大意导致的行为;
一工作中“走捷径”导致的行为;
——为保持机器在所有情况下运转所承受的压力导致的行为;
——特定人员的行为(如儿童、残疾人等)。
注:识别机械危险时.检查已有设计文件是一种实用的方法.特别是那些与运动部件(如电机、液压缸)相关的危险。
5.5风险估计
5. 5. 1概述
危险识别后,应通过确定5.5.2中给出的风险要素,对每种危险状态进行风险估计。在确定这些要 素时,应考虑5.5.3中规定的几个方面。
如果已经存在测量某种排放物的标准方法(或其他适当方法),则宜结合已有的机械或原型样机确 定排放值和可比较的排放数据。这使设计者能够:
--估计与排放相关的风险;
——评估设计阶段所实施保护措施的效果;
一在技术文件中向潜在购买者提供排放的量化信息;
——在使用信息中向使用者提供排放的量化信息。
可测量参数描述的排放之外的其他危险也可采用与此类似的方法进行处理。
5. 5.2风险要素
5. 5.2. 1 概述
与特定危险状态相关的风险取决于以下要素:
a) 伤害的严重程度;
b) 发生伤害的概率.它是下列因素的函数:
D人员暴露于危险的状态;
2) 危险事件的发生概率;
3) 避免或限制伤害的技术和人为可能性。
风险要素在图3给出。5.5.2.2,5.5.2.3和5.5.3中给出了其他的细节。
风险
与所考虐的危险
有关的风险 是
伤害的严重程度
伤害的严重 程度是所考 电的危险导 致的结果
风险要素
该伤害发生的概率
人员暴Il于危险
危险事件的发生
避免或限制伤害的可能性
的函数
5. 5. 2. 2伤害的严重程
伤害或损,
声度进行估计: 严重程度,例如
例如
重伤藏危险嘎产生的
概率
人员暴露于危
a)
b)
C)
d)
e)
进入危险区K 进入的性质(如 处于危险区的时间 需要进入危险区的人鼠】 进入危险区的频次。
僧害发生的概率。估计暴露程度时,尤其应考虑 Ni正常运行、故障修复、维护或修理等);,
5. 5.2. 3.2危险事件的发生
危险事件的发生会影响伤害的发生概率。估计危险事件的发生时,尤其应考虑的因素有:
a) 可靠性和其他统计数据;
b) 事故历史记录;
C)造成健康伤害的历史记录;
d)风险比较(见5.6.3).
注:危险爭件的发生可能源于技术或人为原因。
5. 5.2. 3.3避免或限制伤害的可能性
避免或限制伤害的可能性会影响伤害发生的概率。估计避免或限制伤害的可能性时,尤其应考虑
的因素有:
可能暴露于危险的不同人员,例如: 一技术熟练的人员;
―-技术不熟练的人员。
危险状态导致伤害的速度.例如: —突然;
——快;
——慢。
对风险的认识,例如:
--通过一般信息,特别是使
——通过直接观察
-通过警告标 人员避免或 实践经验, ——该
a)
b)
风险
d)
e)
风
5.5.3
5. 5. 3. 1
5. 5. 3. 2
员
计広
歹虑所有華
险的
影响
讨救丈程中应
孑公认数据为基础进行风
指示5
I是在机械上时
如:
5. 5. 3. 3暴露与影
械的使用有关的伤害的概率和严重程度.
力(如条件反射、敏捷性、避开的
.类型、频次
对在所卷虑通险中暴 作方法。特另臨该 险区的需求。
L器的所得运行模式和工 找假隹护期间进入危
对于每种危险状态,应 响。考虑这些影响时,应尽量D
注1:事故数据有助于确定与具有特定类理
注2:但是.零事故数据并不能保证伤害的概率和严重程度就低。
E暴露累积和危险组合的影
5. 5. 3. 4 人的因素
人的因素可影响风险,风险估计时应予以考虑。这包括,例如:
a) 人员与机械的相互作用,包括失灵的校正;
b) 人员之间的相互作用;
C)压力相关的因素;
d) 人类工效学因素;
e) 特定情况下人员对风险的认知取决于训练、经验和能力;
f) 疲劳因素;
g) 能力受限的因素(如由于残疾、年龄)。
培训、经验和能力都会影响风险,但是.只要在现实可行的情况下.它们都不能用来代替通过本质安 全设计措施或安全防护装置来消除危险和减小风险。
5. 5. 3. 5 保护措施的适用性
风险估计应考虑保护措施的适用性,并且应:
a) 识别能够导致伤害的环境;
b) 只要合适时,使用定量方法来比较可供选择的保护措施(见GB/T 16856. 2);
C)提供有助于选择适当保护措施的信息。
估计风险时.需要特别注意那些已识别出发生故障时会立即增加风险的部件和系统。
当保护措施包括工作组织、正确行为、注意力、个体防护装备的应用、技能或培训时,风险估计时应 考虑与经验证的技术保护措施相比可靠性相对较低的措施。
5. 5. 3. 6废弃保护措施或避开保护措施的可能性
为了实现机器的连续安全运行,重要的是保护措施便于其使用且不妨碍其预定用途。否则.就存在 为了实现机器最大效用而避开保护措施的可能性。
风险估计应考虑废弃或避开保护措施的可能性。风险估计还应考虑废弃保护措施或避开保护措施 的诱因,例如:
a) 保护措施延缓生产或干扰使用者的其他活动或偏好;
b) 保护措施难以使用;
C)涉及到操作者以外人员;
d)使用者对保护措施合适的功能不认知或不认可•
是否能够使保护措施失效取决于保护措施的类型(如可调式防护装置、可编程断开装置)及其设计 细节。
如果通过设计和监控方法不能适当限制访问安全相关软件•则将额外增加釆用可编程电子系统的 保护措施失效或被避开的可能性。风险估计应识别哪些安全相关功能没有与机器其他的功能分开,并 确定可能达到的访问程度。需要远程访问进行诊断或过程校正时•这一点尤其重要。
5.5. 3.7维持保护措施的能力
风险估计应考虑保护措施能否维持在必要的状态,从而提供所要求的防护水平。
注:如果保护措施不易保持在正确的工作状态.为了连续使用机械.这可能促使保护措施被废弃或被避开。
5. 5.3.8使用信息
风险估计应考虑可获得的使用信息。也可见6. 4。
5.6风险评价
5.6. 1概述
完成风险估计后,应进行风险评价•以确定是否需要进行风险减小。如果需要减小风险,则应选用 适当的保护措施(见第6章)。如图1所示,应在采用第6章所述风险减小三步法的每个步骤后确定是 否达到充分的风险减小。作为该迭代过程的一部分,设计者还应检査采用新的保护措施时是否引入了 额外的危险或增加了其他风险。如果出现了额外的危险.则应把这些危险列入已识别的危险清单中,并 提出适当的保护措施。
风险充分减小目标的实现和实际可行的风险比较结果,都可以作为风险已被充分减小的证据。
5.6.2充分的风险减小
实现充分风险减小的基本要求是釆用6.1中所描述的三步法。
采用三步法之后,当满足以下条件时,可认为实现了充分的风险减小:
考虑了所有的运行条件和干预程序;
已消除危险.或风险减小到可行的最低水平;
一已正确处理保护措施产生的新危险;
——已向使用者充分告知和警告了剩余风险(见6. 1中的第三步);
一所采取的保护措施相互匹配;
—— 已充分考虑到为专业/工业用设计的机器用于非专业/非工业场合时产生的后果;
——保护措施不会对操作者的工作条件或机器的易用性产生不利影响。
5.6.3风险比较
只要下列准则适用,作为风险评价过程的一部分,所评价机械或其部件的风险能够与类似机械或其 部件的风险相比较:
类似机械符合相关的C类标准:
一两种机器的预定使用、可合理预见的误用及它们的设计和制造方法都是可比的;
——危险和风险要素是可比的;
——技术规范是可比的;
——使用条件是可比的。
使用这种比较方法并不排除还需要针对特定使用条件进行本标准所规定的风险评估过程。例如: 用于切肉的带锯机与用于切割木材的带锯机比较时,应评估与不同材料有关的风险。
6风险减小
6. 1概述
通过消除危险.或通过分别或同时减小下述决定相关风险的两个因素,可以实现风险减小:
所考虑危险产生伤害的严重程度;
——伤害发生的概率。
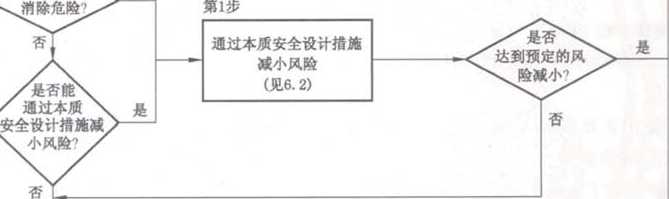
所有预定用于达到此目标的保护措施应按照下列顺序进行•即“三步法”(也可见图1和图2).
第一步:本质安全设计措施
本质安全设计措施通过适当选择机器的设计特性和/或暴露人员与机器的交互作用•消除危险或减 小相关的风险。见6. 2。
注L第一步是不采用安全防护或补充保护措施等保护措施而消除危险的唯一阶段。
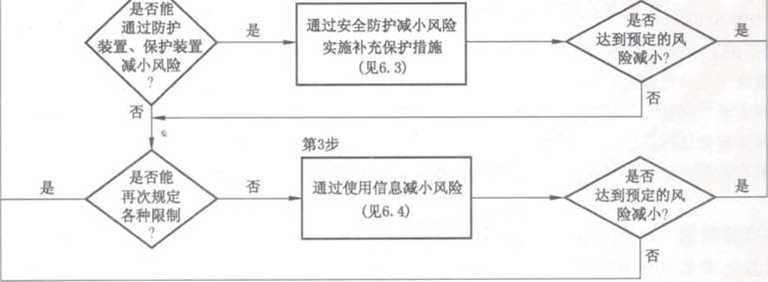
第二步:安全防护和/或补充保护措施
考虑到预定使用和可合理预见的误用,如果通过本质安全设计措施消除危险或充分减小与其相关 的风险实际不可行.则可使用经适当选择的安全防护和补充保护措施来减小风险。见6. 3。
第三步:使用信息
尽管采用了本质安全设计措施、安全防护和补充保护措施•但风险仍然存在时,则应在使用信息中 明确剩余风险。该信息应包括但不限于下列内容:
一使用机械的操作程序符合机械使用人员或其他暴露于机械有关危险的人员的预期能力;
-详细描述使用该机械时推荐的安全操作方法和相关的培训要求:
——足够的信息.包括对该机械生命周期不同阶段剩余风险的警告;
任何推荐使用的个体防护装备的描述.包括对其需求和有关使用所需培训等详细信息。
不应用使用信息代替本质安全设计措施、安全防护或补充保护措施的正确应用。
注2:与每种运行模式和干预程序相关的充分保护措施降低了在遇到技术困难时诱导操作人员采用危险干预技术 的可能性.
6.2本质安全设计措施
6.2. 1概述
本质安全设计措施是风险减小过程中的第一步,也是最重要的步骤,这是因为尽管所釆取的保护
措施作为机器固有特征可能是有效的.然而经验表明即使设计得再好的安全防护也可能失效或被破坏,
使用信息也有可能不被遵循。
本质安全设计措施是指通过J 险或减小风险。
注:如果仅通过本质,
充措施(见6. 1
b)
d)
与机器的交互作用来消除危
6.2. 2. 1 几
机 考 要
几何因
a)
6. 2. 2 几何因
雁择机器
和戒
足以减小风险时,可采用6.3给出的
性的考虑
的
料
机器通设f 机械部 险.使得人 GB 12265.3 避免锐边、尖角 伤害的锐边、尖角、 薄板,其边缘应除去毛刺:
机器外形的设计应获得合理的操作S
物
21);
不影响其功能的情况下,日
括
外
N
移E
•的地
时.
设计使彳
视觉的
持续进
机器的彳:
荷或提升
理时,手
会区術
呼等),
:观察装置
险目标的安全防护和补
其是安全操作需
使得在主控制位置上的
孑最大■如虞少盲点
危险区内没有暴刷
和相对位置:例如.通过加大运动部件之间的最小间
部位可以安全的进入.或通过减小间距使人
角.并且对可能也站
挤压和剪切危 部位不能进入(见
部件不应岀现可能造成 入”的开口。特别是对金属
”的管口端,应进行覆盖; 近的手动控制器(执行器)。
6.2.2.2 物理特性
物理特性包括:
a) 将致动力限制到足够低,使得被致动的部件不会产生机械危险;
b) 限制运动部件的质量和/或速度.从而限制其动能;
C)根据排放源特性限制排放,釆取措施减小:
D 排放源的噪声排放(见GB/T 25078.1),
2) 振动源的振动,如重新分配或增加质量并改变过程参数[例如:运动的频率和/或振幅(手 持式和手导式机械,见CR 1030-1)];
3) 有害物质的排放.包括使用更安全的物质或使用降低粉尘的工艺(用颗粒代替粉末、用铳
代替磨
4)辐射排放.例如:避免使用有害辐射源;在满足机器正常功能的情况下将辐射功率限制在最 低水平;通过设计使辐射源射线束集中于目标之上;加大辐射源和操作者之间的距离或提供 远程操作机械的装置[降低非电离辐射的措施在6. 3. 4. 5中给岀(也可见GB/T 26118. 1和 GB/T 26118.3)].
6. 2.3考虑机械设计的通用技术知识
通用技术知识可从设计技术规范(标准、设计规范、计算规则等)中得到,这些知识宜涵盖:
机械应力,例如:
-对螺栓连接装配和焊接装配等•通£ 用正确计算、构造和紧固方法限制应力;
等)限制应力;
a)
b)
性、脆性;
器•
⅛ 贮 ↑T^
项汨的排放
的选用可消除一种或多种危险•或者
器,米用:
环境
GB 3836.4);
、断裂点、力矩
rrɪ
材料及其恤•例
苒物质:
如:
对于具体的应 a)
借助过载保护(防爆 一避免交变应力 一回转件的
沛射
如果特笼部 件),则其应
6.2.4适用技
b)
C)
或者装酣
工作系数。
预定用于爆:
——经适当选择
——本质安全的电气i
对特定的待加工产品(如溶剂), 使用可避免高噪声的替代设备,例如:
——以电气设备代替气动设备,
在某些条件下.用水切割设备代替机械加工设备。
i的绳.链条、提升附
6.2.5采用直接机械作用原则
如果一个机械零件运动不可避免的使另一个零件通过直接接触或通过刚性连接件随其一起运动, 这就实现了直接机械作用•电路中开关装置的直接打开操作是其中一个示例(见GB 14048. 5-2001 和 GB/T 18831—2002).
注:如果一个机械部件的运动造成第二个部件自由运动(如因为重力、弹簧力则前者对后者不存在直接机械 作用.
6.2.6 稳定性的规定
机器的设计应使其具有足够的稳定性.并使其在规定的使用条件下可以安全使用。需要考虑的因 素包括:
——底座的几何形状;
包括载荷在内的重量分布;
一由于机器部件、机器本身或机器所夹持部件运动引起的.且能够产生倾覆力矩的动态力;
-振动;
--重心的摆动;
设备行走或不同安装地点(如地面条件、斜坡)的支承面的特性;
——外力,如风力、人力。
在机器生命周期的各个阶段内,包括搬运、运输、安装、使用、拆卸、停用和报废,都应考虑机器的稳 定性。
与安全防护有关的其他稳定性保护措施在6.3. 2.6中给出。
6.2.7维修性的规定
设计机器时.应考虑以下使机器可维护的维修性因素:
——可接近性,考虑环境和人体测量尺寸,包括工作服和所使用工具的尺寸;
——易于搬运,考虑人的能力;
——专用工具和设备的数目限制。
6.2.8遵循人类工效学原则
设计机械时应考虑人类工效学原则.以减轻操作者心理、生理压力和紧张程度。在初步设计阶段, 分配操作者和机器的功能(自动化程度)时,应考虑这些原则。
注:这样也能改善操作性能和可毒性.从而降低在机器所有使用阶段内的岀错概率。
应考虑机器预定使用人群的人体尺寸、力量和姿势、运动幅度、动作重复频率(见GB/T 15241和 GB/T 15241. 2).
人机界面的所有元件•如控制装置、信号或数据显示元件•其设计应易于理解•使操作者和机器间的 相互作用尽可能清楚、明确。见GB 18209. 1、EN 614-1和EN 1386Io
设计者在设计机器时,尤其应注意以下人类工效学要求:
a) 避免操作者在机器使用过程中采用紧张姿势和动作的必要性(如提供按照不同操作者调节机 器的装置)。
b) 机器.尤其是手持式和移动式机器的设计,应考虑人力的可及范围、控制机构的操动,以及人的 手、臂、腿等解剖学结构,使其容易操作。
C)尽可能限制噪声、振动、热效应(如极端温度)。
d) 避免操作者的工作节奏与自动连续循环之间的联系。
e) 当机器和/或其防护装置的结构特征使得环境照明不足时.应在机器上或机器内部提供对工作 区和调整、设定与经常维护区的局部照明。应避免引起风险的闪动、眩光、阴影和频闪效应。 如果不得不调整光源或光源的方位,则光源的位置不应对调整者造成任何危险。
f) 手动控制装置(执行器)的选用、位置和标记应满足以下要求:
-清晰可见、可识别.必要处适当加标志(见6.4.4);
可毫不退疑的或立刻进行安全操作,且作用明确(如控制装置采用标准布局•可降低操作 者由一台机器转到另一台具有相同运行模式的同类型机器上工作时岀错的概率); 一位置(对按钮)和运动(对手柄和手轮)与它们的作用一致(见GB 18209.3);
——操作不能引起附加风险。
也可见 ISC) 9355-3.
当所设计和制造的控制装置执行几种不同动作时,即它们不是一一对应的(如键盘等),则所执 行的动作应清晰的显示出来,并且必要时应经过确认。
应根据人类功效学原则,使控制装置的布局、行程和操作阻力与所执行的动作相匹配。应考虑 由于采用必要的或预计使用的个体防护装备(如鞋、手套等)所带来的约束。
g)指示器、刻度盘和视觉显示单元的选择、设计与位置应使得:
它们在人员能觉察的参数和特征范围之内;
-对操作者的要求和预定使用而言,显示的信息应便于察看、识别和理解.即耐久、清晰、含 义确切、易懂;
操作者在操作位置能觉察到它们。
6.2.9 电气危险
对于机械电气设备的设计,GB 5226. 1给出了关于电路断开与接通以及防电击保护的一般规定。 有关特定机器的要求,见相应的IEC标准(如IEC 61029 JEC 60745或IEC 60335)。
6.2. 10气动与液压危险
机器的气动和液压设备的设计应使得:
——不能超出回路的最大额定压力(如通过限压装置);
不能因压力波动或升高、压力损失或真空导致危险;
不能因为泄漏或部件失效而导致危险的流体喷射或软管突发危险运动(如甩动);
储气罐、蓄气瓶或类似容器(如充气蓄能器)符合相关的设计标准、规则或法规;
——设备的所有元件.尤其是管路和软管.有防止受到外部有不利影响的保护措施;
当机器与动力源断开后(见6. 3.5.4).储气罐等类似容器(如充气蓄能器)尽可能自动卸压,如 果无法实现,则提供隔离、局部卸压及压力显示的措施(见GB/T 19670.1-2005中第5章 所有在机器与动力源断开后仍保持压力的元件.配备有清晰标识的排空装置,以及对机器进行 任何设定或维护前必需对这些元件进行卸压的警告牌。
注:也可见 GB/T 3766 和 GB/T 7932.
6.2. 11对控制系统应用本质安全设计措施
6.2. 11. 1 概述
控制系统设计措施的选用应使其有关安全的性能可减小足够的风险(见GB/T 16855. 1或 IEC 62061)o
机器控制系统的正确设计可避免无法预料的或潜在的机器危险状况。
导致机器危险状况的典型原因是:
一控制系统逻辑的设计或修改不合适(无意的或有意的);
——控制系统的一个或几个部件暂时或永久的缺陷或失效;.
——控制系统动力源的变化或失效;
——控制装置的选用、设计和位置不当。
机器危险状况的典型例子有:
——意外启动(见GB/T 19670)!
一没有控制的速度变化;
运动部件无法停止;
―-机器部件或机器夹紧的工件掉落或飞出;
——保护装置不起作用(被废弃或失效)造成的机器动作。
为了防止机器危险状况并实现安全功能.控制系统的设计应符合6. 2. 11和6. 2. 12中提出的原则 和方法。根据具体情况.这些原则和方法可以单独使用.也可以联合使用(见GB, T 16855. !,GB 5226. 1和
IEC 62061)O
控制系统的设计应便于操作者与机器进行安全互动。这要求采取以下一种或多种方法: 对启动和停止条件进行系统分析;
提供特定运行模式(如正常停机后启动、运行过程中断后或急停后重新启动、卸下装在机器上
的工件、在机器的一个元华
-清晰的显示故障;
——采取措施防止罗盛指令(如孑
GB/T 1967O^TOO5 ⅛l∏)5
保持停机夕商以防止可能产生机器危险状况的重新启魏见('T 图 1)。/ ,
多台机器白5合通獄謁 耗散。应明确么刁 置(如急停装
会在其他因]
控制系4
数(如范围、]
例如:I
——非』
[、动,源断开 ⅛i帝止的区 的if计应将机
刷的移动』
K员的载人
部件);
造成机器危险状况(见
19670—2005 中
于隔离与能量
卜域的控制装 >内的功能不
[运动I
)的裕
险的数值范
围内V做操作童
--用于…W,.....
如果机械包,女咨作的不同元件,则控制系统的设计应能防止因缺歹T调觥的危险(如防碰
撞系统)。 X、 y A
6.2. 11.2启动内部动淑
部能源供应
启动内部动力源或接通洒関缨"FmM 一内燃机启动不应导致移宙遍笔运动;
例如
接通主电源不应导致机器工作部件縮奇7
见GB/T 5226. 1—2008中7. 5(也可见附录A和附录B).
6.2. 11.3机构的启动/停止
用于机构启动或加速运动的主要动作宜通过施加或增大电压或流体压力来实现.或者.如果考虑采 用二进制逻辑元件,则通过由。状态变到1状态来实现(其中1代表最髙能态)。
用于机构停止或减速运动的主要动作宜通过去除或降低电压或流体压力来实现.或者•如果考虑采 用二进制逻辑元件.则通过由1状态变到0状态来实现(其中1代表最高能态)。
在某些应用中.如高压开关装置.不能遵循此原则,此时宜采取其他措施来实现同等置信等级的停 止或减速。
如果为了使操作者能保持对减速的持久性控制而未遵循此原则(如自行式移动机器的液压制动装 置)时,则在机器上应配备主制动系统失效时用于减速或停止用的装置。
6.2. 11.4 动力中断后重新启动
如果动力中断后重新接通时.机器自发的重新启动可能产生危险.则应防止这种启动(如釆用自持 式继电器、接触器或阀门)。
6.2. 11.5动力源中断
机器的设计应防止因动力源中断或波动过大造成的危险状态。至少应满足以下要求:
-应保持机器的停机功能;
对于为了安全而需要持久操作的困 置、冷却或加热装置 一因势能可能产罗嫉編J
能所需的必
団效的方式操作来保持安全(如锁紧、夹紧装 劫机器的动力辅鬲
*贝仇股JJlIJχyu歳郭页应能保留允许其安全降低势
6.2. 11.6 使用
如果执行
件或元件的能力被削弱或因工艺条件变化产生危险
在下一
保护
户]能启舀 眼护措施
須是,例如 呈的停止W 睛次澆
〈如可编程控制器)的控制系统在适当时可用于 射岐考虑与安全功能要求有关的性能要旳S 充分降低对安全相关插呕蟲Z壁成不利影响的随机硬彳埒*5 编程电子控制系统用于 T 茴件件沖竹糸阳I
标准儿
注:专门针对机械安全的GB/T 16855. 1和
含有可编程 用可编程电子控⅛J%s
:術安全功能,如果采 衆控制系统的设计应
炒统失效的可能性,如果可 鬲,也可见GB/T 20438系列
响風供了适用于可编程电子控制系统的指南。
可编程电子控制系统的安装与确认宜确保每种安全功能已达到规定的性能[如GB/T 20438中的
安全完整性等级(SIL)].确认包括试验和分析(如静态、动态或失效分析),用于证明所有部件能够相 互正确作用.执行安全功能,且不会发生非预期的功能。
6.2. 11.7.2硬件方面
硬件(包括传感器、执行器、逻辑运算器等)的选择、设计和安装应同时满足待执行的安全功能的功 能和性能要求,特别是通过以下方式来实现:
——结构约束(如系统结构、硬件的容错能力、硬件的故障检测性能);
——选择和/或设计具有适当硬件随机危险失效概率的设备和装置;
——将避免系统性失效和控制器系统性故障的措施和技术纳入硬件中。
6.2. 11.7.3软件方面
包括内部操作软件(或系统软件)和应用软件在内的软件.其设计应符合安全功能的性能规范(也可 见 GB/T 20438. 3).
应用软件不宜由用户进行重新编程。这可通过在不可重新编程的存储器中使用嵌入式软件[如微 控制器、专用集成电路(ASIC)]来实现。
需要用户重新编程时.宜限制访问涉及安全功能的软件(如锁或授权人员的密码)。
6.2. 11.8有关手动控制的原则
应遵守以下原则:
a) 手动控制装置的设计和定位应符合6. 2.8的f)中给出的有关人类功效学原则。
b) 每个启动控制装置附近均应配置一个停止控制装置。如果启动/停止功能通过保持-运行控制 方式实现,则当保持-运行控制装置释放后不能发出停止指令而造成风险时.应提供单独的停 止控制装置。
C)除某些有必要位于危险区的控制器之外.如急停控制器或示教盒,手动控制器应位于在危险区 内能触及的区域之外(见GB/T 18209. 3)。
d) 控制装置和控制位置的定位应尽可能使操作者能观察到工作区或危险区。
D除了从其他位置可以更安全地控制的功能之外.骑乘式移动机器的驾驶员应能从驾驶位 置驱动机器运行所需要的所有控制装置。
2)在预定用于提升人员的机械上,用作升降的控制器以及适当情况下用作移动轿厢的控制 器,通常应位于轿厢内。如果安全操作需要将控制器置于轿厢外,则应向轿照内的操作者 提供防止轿相危险运动的方法。
e) 如果儿个控制器可能启动同一危险元件.则控制回路的布置应使得在给定时间只能有一个控 制装置是有效的。这尤其适用于由操作者携带便携式控制单元(如示教盒)等进入危险区内进 行手动控制的机器。
f) 控制执行器的设计或防护应使其在有风险的场合只有通过主动操作才能起作用(见ISO 9355-1、 ISo 9355-3 和 GB/T 17161).
g) 对于依靠操作者持久、直接操控才能安全运行的机器功能,应采取措施确保操作者处于控制位 置上(如通过控制装置的设计和位置)。
h) 对于无线控制装置,在没有接收到正确的控制信号.包括失去联络时,应执行自动停机功能(见 GB 5226. 1)。
6.2. 11.9设定、示教、过程转换、故障查找、清洗或维护的控制模式
对机械的设定、示教、过程转换、故障査找、清洗或维护,当不得不移开或拆除防护装置和/或使保护 装置不起作用,以及为了进行这些操作而有必要使机器或机器的某些部件运转时.应采用同时满足下列 要求的特殊控制模式来实现操作者的安全:
a) 使其他所有控制模式不起作用;
b) 只有通过连续驱动使能装置、双手操纵装置或保持-运行控制装置,才允许危险元件运转;
C)只有在风险已被减小的条件下(如已利用有限运动控制装置等逐步减速、降低动力/力),才允 许危险元件运转;
d)通过机器的传感器上主有意或无意的动作防止任何危险功能运行。
注:对一些特殊机械.可能有其他更合适的保护措施。
此控制模式应与下列一项或多项措施相结合:
-尽可能限制进入危险区;
急停控制器位于操作者立刻可触及的范围内;
便携式控制单元(示教盒)和/或现场控制装置(能看到被控元件)。
见 GB 5226. 1.
6.2. 11. 10控制和运行模式的选择
如果机械的设计和制造允许用于几种需要不同保护措施和/或工作流程要求的控制或运行模式(如 允许调整、设定、维护、检査),则应配备一个能锁定在每个位置的模式选择器。选择器的每个位置都应 清晰无疑并对应一种操作或控制模式。
选择器可能被另一种选择方式所代替.这种选择方式限定只有某些操作者才能使用机器的某些功 能(如用于某些数控功能的访问口令)。
6.2. 11. 11釆取措施实现电磁兼容(EMC)
关于电磁兼容的指南,见GB 5226. 1和IEC 61000-60
6. 2. 11. 12辅助故障查找的诊断系统
控制系统中宜含有辅助故障查找的诊断系统.以便无需使任何保护措施不起作用。
注:这类诊断系统不仅改善机器的实用性和可维修性.还可以减少维护人员在危险区的暴露。
6.2. 12最大程度降低安全功能失效的概率
6.2. 12. 1 概述
机器的安全不仅取决于控制系统的可靠性,而且还取决于机器所有部件的可靠性。
安全功能的持续运行对机器的安全使用至关重要。这可以通过采取6. 2. 12. 2-6. 2. 12.4给出的 措施来实现。
6.2. 12.2使用可靠的组件
“可靠的组件”是指在预定使用条件下(包括环境条件)•在固定的使用期限或操作次数内,能够经受 住与设备使用有关的所有干扰和应力,且产生危险机器失灵的失效概率小的组件。组件的选择应考虑 上述所有因素(也可见6. 2.13)。
注1: “可靠的组件”不等于“经验证的组件”(见GB/T 16855.1-2008中6.2.4).
注2:需要考虑的环境条件包括冲击、振动、冷、热、潮湿、粉尘、腐ii和,或磨蚀材料、静电、电磁场,由此产生的干扰 包括绝缘失效、控制系统组件的功能暂时或永久失效。
6.2. 12.3使用“定向失效模式”组件
“定向失效模式”组件或系统是指主要失效模式已事先知道,并且能预知使用时机器功能发生此类 失效的影响的组件或系统。
注:在有些情况下.有必要釆取附加措施限制这类失效的负面影响。
宜始终考虑使用这类元件,特别是在未采用冗余时(见6. 2. 12.4).
6.2. 12.4组件或子系统加倍(或冗余)
设计机器安全相关部件时,可能使元件加倍(或冗余),以便当一个组件失效时,另一个组件或其他 多个组件能继续执行各自的功能•从而保证安全功能继续有效。
为了允许触发正确的动作,应通过自动监控(见6.2. 11.6)或在某些情况下通过定期检查(假如定 期检査的间隔小于组件的预期寿命)来检测组件的失效。
可釆用多样化的设计和/或技术来避免共因失效(如由于电磁干扰)或共模失效。
6.2. 13通过设备的可靠性限制暴露于危险
机器各组成部件可靠性的提高可降低发生需要干预的事故的频率,从而减少暴露于危险。
这同样适用于机器的动力系统(操作部分见附录A)、控制系统、安全功能以及其他功能,
应釆用可靠性已知的安全相关组件(如某些传感器)。
防护装置和保护装置的元件应特别可靠.因其失效能使人员暴露于危险,且由于可靠性差还会鼓励 人员废弃这些装置。
6.2. 14 通
机器加 '人员在操
作点暴露于
可通过 Z分度工作
台等实现机
自动装料和,
注意保证使用j 入或挤压。Hlii
6. 3. 1 一般要N
在全面, 统的自动装彳
6.2. 15将涉
应将维
6.3安全防
保证,应
和收集有毒排放物。
有控制系
6. 3.2防护装置和保护装置的选择和使用
一旦通过本质心 必® 施可能无法合理消除危险或充分减小风险•贝侦使般护装置和保护装
置来保护人员。可能新嗥括附加设备(如急停设备)在内的未少楠”讐幺 注:各类防护装置和保的和3. 28.
某些安全防护装置可新
示例:用于防止进入机械危险区 詞Z⅛雌 置,同时也用于降虫竖疝 收集有毒排1
6.3.2. 1 一般要求
根据运动部件的性质(见图4)和进入危险区的需求,本条给出了选择和使用防护装置和保护装置 的指南。釆用这些装置的主要目的是防止运动部件对人员产生危险。
对特定机器的安全防护装置的正确选用,应基于该机器的风险评估结果。
为特定类型的机器或危险区选用合适的安全防护装置时,应铭记固定式防护装置是简単的装置,并 且用在机器正常运行(无失灵运行)期间不需要操作者进入危险区的场合。
随着需要进入危险区的频次增加,不可避免的导致固定式防护装置无法回到原处。这需要使用其 他保护措施(活动式联锁防护装置、敏感保护设备)。
有时可能需要使用安全防护装置的组合。例如:与固定式防护装置联合使用的机械式加载(装料)
装置用于将工件送入机器.从而消除进入主要危险区的需求。此时.可采用一个断开装置防止由机械式 加载(装料)装置与可触及的固定式防护装置之间产生的次要卷入或剪切危险。
应考虑封闭控制位置或干涉区域,以提供针对多种危险的组合保护.这些危险包括:
a) 通过落物保护结构(FoPS)等亍以保护的坠落或弹射物体产生的危险;
b) 排放危险(防止噪声、振动、辐射、有害物质对健康的危害等);
C)因环境造成的危险(如防止热、冷、恶劣天气等);
d)通过滚翻保护结构或倾翻保护结构(RoPS和ToPS)等予以保护的机械滚翻或倾翻产生的
危险。
对封闭式工作站.如室和舱的设计.应考虑与能见度、照明、大气条件、进入途径、姿势等相关的人类 工效学原则。
由运动的传动部件
产生的危险A
运动部危险
式防
!非加工区
件
(见6. 3. 3. 2.4)
制夠睡工艺过程要求不得
'的区域内的运动部件
:定式I
'护装置
或
动监 1
一具:
定的活动!
防护装置(
6.3.3.2.3 )
带或建防护,
(⅞6. 3.K.2)
X (见6. 3. 3.2. 3)
— 保护装置(见6. 3. 3.3)
根据进入危险区的需求和危

防护装碧(见6.. 3.2.2〉,
式防
图4选择安全防护装置防止由运动部件产生的危险的指南
6.3.2.2正常运行期间不需要进入危险区
机械正常运行期间不需要进入危险区时,宜选用下列安全防护装置:
a) 固定式防护装置(见GB/T 8196);
b) 带或不带防护锁定的联锁防护装置(也可见6.3. 3. 2. 3、GB/T 18831和GB/T 8196);
C)自关闭式防护装置(见GB/T 8196—2003中3. 3. 2);
d)敏感保护设备.如电敏保护设备(见IEC 61496)或压敏保护装置(见GB/T 17454).
6. 3.2.3正常运行期间需要进入危险区
机械正常运行期间需要进入危险区时,宜选用下列安全防护装置:
a) 带或不带防护锁定的联锁防护装置(也可见GB/T 18831,GB/T 8196和本标准的6.3. 3. 2. 3);
b) 敏感保护设备,如电敏保护设备(见IEC 61496);
C)可调式防护装置;
d) 自关闭式防护装置(见GB/T 8196—2003中3. 3. 2);
e) 双手操纵装置(见GB 19671)J
f) 带启动功能的联锁防护装置(带控制功能的防护装置)(见6. 3. 3. 2.5).
6.3.2.4机器设定、示教、过程转换、故障查找、清洗或维护时需要进入危险区
机器的设计应尽可能使得用于保护生产操作人员的安全防护装置•也可在不妨碍进行设定、示教、 过程转换、故障查找、清洗或维护的人员执行任务的前提下•保护他们的安全。此类任务应在风险评估 中作为机器使用的组成部分进行识别和考虑(见5.2)。
注:在进行一些无需机器与其动力源保持连接的工作任务(特别是维护和修理任务)时,动力源的隔离和机器停止 后的能量耗散(见6. 3.5.4,也可见GB/T 19670-2005的4. 1和第5章)可确保最高等级的安全水平。
6. 3.2.5敏感保护设备的选择和使用"
6. 3.2.5. 1 选择
由于敏感保护设备检测功能所基于的技术的多样性•因此所有类型的敏感保护设备用于安全用途 时的适合程度存在很大差异。以下条款为设计者针对各种应用选择最合适的装置提供了准则。
敏感保护设备的类型包括:
一光幕;
——扫描装置.如激光扫描器;
——压敏垫;
一边沿开关、拉绳开关。
敏感保护设备可:
——用于触发;
——用于存在感应;,
——用于触发和存卷感应;
——重新启动机器的运行,此做法需要满足严格的条件。
注:有些类型的敏感保护设备既不适用于存在感应•也不适用于触发.
尤其对于具有下列特征的机械不能单独使用敏感保护设备:
一可能存在材料或零部件弹射;
——不得不防止排放(噪声、辐射、粉尘等);
一无规律的或过长的机器停机时间;
——机器不具备在工作循环过程中停机的能力。
6. 3. 2. 5. 2 实施
宜考虑以下因素:
a)检测区域的大小、特征和位置(见GB/T 19876,该标准涉及某些类型的敏感保护设备的定位);
1) 详细资料.见IEC/TS 62046。
b)装置对故障状态的反应(电敏保护设备见IEC 61496);
C)被避开的可能性;
d)检测能力及其随时间的变化(如由于对反射表面、其他人工光源、日光或空气杂质等这类不同 环境条件的敏感性而造成的结果)。
注1: IEC 61496规定了电敏保护设备的检测能力。
敏感保护设备应集成到操作部分中,并且与机器的控制系统相连接,从而使得:
--旦检测到人员或人体部位就立即给出指令;
撤回被检测到的人体或人体部位不会自动重新启动危险机器功能,从而使控制系统在给出新 的指令之前维持敏感保护设备发出的指令;
一危险机器功能的重新启动是操作者主动驱动位于操作者可观察到的危险区之外的控制装置的 结果;
-除抑制阶段外•敏感保护设备的检测功能被中断时,机器不能运转;
一检测区域的位置和形状.可能和固定防护装置一起防止人或人体部位在未被探测到的情况下 进入或处于危险区。
注2:抑制是指安全功能被控制系统有关安全部件临时自动暂停(见GB/T 16855.1).
关于故障特征更详细的考虑,如对于有源光电保护装置,宜考虑使用IEC 614960
6.3.2. 5.3对用于循环启动的敏感保护设备的附加要求
在此类特殊应用中•机器工作循环的启动由被检测到的人体或人体部位从敏感保护设备检测区撤 出引起,且不需要任何额外的启动指令,因此不符合上述6. 3. 2. 5. 2第二个破折号中的要求。但是.接 通动力源后或敏感保护设备的触发功能已经使机器停机时,机器的工作循环应只能通过主动驱动启动 控制装置才能启动。
由敏感保护设备引起的循环启动应满足以下条件:
a) 只应使用符合IEC 61496系列标准的有源光电保护装置(AOPDS);
b) AOPD用做触发和存在感应装置(见IEC 61496)时的要求得到满足——特别是位置、最小距 离(见GB/T 19876)、检测能力、可靠性以及对控制和制动系统的监控;
C)机器的循环时间短,并且感应区一旦清空,机器重新启动的时间被限制在与单个正常循环相匹 配的周期内;
d) 进入AOPD的感应区或开启联锁防护装置是进入危险区的唯一途径;
e) 如果有多个AOPD用于机器的安全防护,则其中只能有一个具有循环再启动的能力;
f) 对于自动循环启动产生的较高风险.AOPD和与其相关的控制系统应比正常工作条件下具有 更高的安全相关性能。
注1:上述d)中所指的危险区是指由清空感应区而触发的危险功能(包括辅助设备和传送元件)所在的任何区域.
注 2:也可见 IEC/TS 62046。
6.3.2.6稳定性的保护措施
如果不能通过重量分布(见6.2.6)等本质安全设计措施实现稳定性,则有必要采取措施保持机器 的稳定性,例如:
地脚螺栓;
——锁定装置;
——运动限制器或机械式停机装置;
一加速或减速限制器;
——载荷限制器;
接近稳定性极限或倾覆极限时发出警告的警报器。
6.3.2.7其他保护装置
当机器需要操作者连续操控(如移动式机器、起重机),且操作者的错误能产生危险状态时,则应为 该机器配备必要的、使其运行保持在规定限度内的装置,特别是;
-当操作者不能充分观察到危险区时;
-当操作者对安全相关参数(距离、速度、质量、角度等)的实际值缺乏了解时;
——当危险是由操作者控制之外的运行引发时。
必要的装置包括: ____
限制运动参数(距离、角度书AlIlJIL州队L
过载和力矩限制装…______f
防止与其他机啰盛岁
防止对移动歹5 作者或其他行人产生危险的蟲、
防止组件事功戒过大的扭矩限制装置或断裂点;、.X
限制压嫉珂/装置; 监控月■的¾⅛;AS 防止声
控制范围.
k)
上述装
因此.宜预夕
6.3.3防护
6.3.3. 1
防护装置和陽F蕙电的设计应适用于预定使用,并考虑相关的机械危险彳 保护装置应与机显洎暨协调,且其设计应使其不易被废弃。为减少岁 置和保护装置对机盅蚯扁恩机器生命周期其他各阶段的各种动作与
他蝶险。防护装置和 泌诱因.应将防护装 脸低程度。
61496 和 IEC 62061.
注:更多信息见gb/tI^gb/
∣55.1.GB 19671 ,GB∕ T 18831、454
防护装置和保护装置者、
结构坚固耐用;
不增加任何附加危险;
不容易被绕过或使其无法操作;
与危险区有足够的距离(见GB/T 19876和GB 23821)S
对观察生产过程的视野障碍最小;
只允许进入不得不进行操作的区域,进行工具的安装和/或更换及维修等必要的工作,且尽可 能不移除防护装置或使保护装置不起作用。
防护装置的开口 ,见GB 2382Ie 6.3.3.2防护装置的要求
6.3.3.2. 1防护装置的功能
防护装置能实现的功能如下:
——防止进入被防护装置封闭的空间.和/或
容纳或捕获由机器抛出或掉下的材料、工件、切屑、液体,减少由机器产生的排放(噪声、辐射、 有害物质,如粉尘、烟雾、气体等)。
此外•防护装置可能还需要具有与电、温度、火、爆炸、振动、能见度(见GB/T 8196)以及操作者位 置人类工效学(如易用性、操作者的运动、姿势、重复运动)相关的独特特征。
6.3. 3.2.2固定式防护装置的要求
固定式防护装置应釆用以下方式保持其位置:
—永久固定(如通过焊接);或 通过紧固件(螺钉、螺母)固 防护装置不宜保持关Ji
注:固定式防护装置可:
活动式防
a) 打
b) 是
见图
活动
从而使得
能将其移除/打开;没有紧固件时•固定式
见图4
6.3. 3.2.4
6.3.3.2.3 活动
成勺
防
件启动
作
持恒
匙J
(T-
f牛在:操
过采用联
过有意识
n ::
可
护:
式
装置的要求
GB/T 8196).
接辅
护
的要求
苫
。操作
就触及不到.
过自动监控来
只有因操作需
手动可调式防护装*符合
--设计上应保证在
一不使用工具就容易调整。
全封闭危险区时.才可采用可调式防
器控制系统相连,
6. 3.3.2.5带启动功能的联锁防护装置(带控制功能的防护装置)的要求
只有满足以下条件才能使用带启动功能的联锁防护装置:
a) 满足联锁防护装置的所有要求(见GB/T 18831);
b) 机器的工作循环时间短;
C)将防护装置打开的最长时间预先设定为较低的值(如等于循环时间),并且一旦超过该时间.通 过关闭带启动功能的联锁防护装置不能触发危险功能,并在重新启动机器前有必要进行复位;
d) 防护装置关闭时.机器的尺寸或形状不允许人员或人体部位停留在危险区内或危险区与防护 装置之间(见GB/T8196);
e) 其他所有防护装置,无论是固定式(可拆卸式)还是活动式均为联锁防护装置;
f) 与带启动功能的联锁防护装置相连的联锁装置,其设计应使得在位置检测器加倍以及使用自
动监控等方法时(见6. 2.11.6),其失效不能导致非预期的启动/意外启动;
g)防护装置安全可靠的保持打开状态(如通过弹簧或配重),使其不能因其自身重量掉下而触发 启动。
6. 3.3.2.6防护装置产生的危险
应注意防止可能由以下因素带来的危险:
一防护装置的结构(锐边或尖角、材料、噪声排放等);
—防护装置的运动(由动力驱动的防护装置和由容易掉下的重型防护装置产生的剪切或挤压区)。
6.3.3.3保护装置的技术特征
保护装置的选择或设计以及与控制系统的连接,应确保能正确执行其安全功能。
保护装置的选择应符合相应的产品标准(如关于有源光电保护装置的IEC 61496),或者应根据 GB/T 16855. 1或IEC 62061所规定的一项或多项原则进行设计。
保护装置的安装以及其与控制系统的连接应使其不能轻易被废弃。
6.3. 3.4提供其他类型的安全防护装置
由于待完成工作范围的原因而不得不改变安全防护装置时,宜提供便于安装其他类型的安全防护 装置的措施。
6.3.4通过安全防护减少排放
6.3.4. 1 一般要求
如果6. 2. 2. 2中减少排放源排放的措施不够.则应为机器提供补充保护措施(见6. 3. 4. 2〜6. 3. 4.5).
6.3.4.2 噪声
防止噪声的补充保护措施包括:
——隔声罩(见GB/T 19886);
——安装在机器上的隔声屏;
——消声器(见GB/T 20431).
6.3.4.3 振动
防止振动的补充保护措施包括:
隔振器,如置于振源和暴露人员之间的减震装置;
——弹性架;
——悬浮座椅。
固定式工业机械的振动隔离措施,见EN 12990
6. 3.4.4有害物质
防止有害物质的补充保护措施包括:
——机器的密封(带负压的外壳);
——带过滤的局部排气通风;
——用液体加湿;
—一机器区域内特殊通风(气幕、操作舱)。
见 GB/T 18569. 1.
6. 3. 4. 5 辐射
防止辐射的补充保护措施包括:
——采用过滤和吸收;
使用衰减屏或防护装置。
6.3.5补充保护措施
6. 3. 5. 1 概述
根据机器预定用途及可合理预见的误用.可能不得不采用既不是本质安全设计措施、安全防护(使 用防护装置和/或保护装置),也不是使用信息的保护措施。这类措施包括6. 3. 5.2-6. 3.5.6给出的措 施•但并不局限于此。
6. 3. 5. 2实现急停功能的组件和元件
如果根据风险评估.机器需要安装实现急停功能的组件和元件.以避免正在发生或即将发生的紧急 状态时,则应满足下列要求:
执行器应容易识别、清晰可见且随手可及;
应尽快停止危险过程,且不产生额外的危险,但如果这不可能实现或不能降低风险,则宜考虑 执行急停功能是否为最佳解决方法;
急停控制器应触发或允许触发某些必要的安全防护装置的运动-
注:更详细的规定.见GB 16754.
一旦执行急停指令后急停装置的有效动作已经停止,应维持该指令的作用直至其复位为止.只有在 触发急停指令的位置,才有可能复位。急停装置的复位不应重新启动机器,而仅是允许机器重新启动。
设计和选择实现急停功能的电气组件和元件的详细要求,见GB 5226。
6. 3. 5. 3被困人员逃生和救援措施
被困人员逃生和救援的措施可能主要是指:
在可能使操作者陷入危险的设施中的逃生通道和躲避处;
一供急停后人工移动某些元件的安排;
用于某些元件反向运动的布置;
——下降装置的锚定点;
一受困人员的呼救通讯方式。
6. 3. 5. 4隔萬和能量耗散的措施
机器应具备通过采取以下措施实现隔离动力源和耗散储存能量的技术手段:
a) 将机器(或指定的机器部件)与所有动力供应隔离(脱开、分离);
b) 将所有隔离单元锁定(或采用其他方式固定)在隔离位置:
C)耗散能量,如果不可能或不可行.抑制(遏制)任何可增大危险的储存能量;
d)通过安全工作程序验证按照上述a)Λ)和C)所釆取的措施是否已达到预期效果。
见 GB/T 19670—2005 中第 5 章和 GB 5226. 1—2008 中 5. 5 和 5. 6。
6.3.5.5提供方便且安全搬运机器及其重型零部件的装置
无法移动或无法用手搬运的机器及其零部件应配备或能够配备适当的附属装置•用于通过提升机 构搬运。
这些附属装置可能是:
带吊索、吊钩、吊环螺栓或用于固定的螺纹孔的标准提升设备;
-当不可能从地面安装附属设备时.采用带起重吊钩的自动抓取设备;
通过叉车搬运的机器的叉臂定位装置;
——集成到机器内的提升和装载机构和设备。
对操作中可通过手动拆除的机器部件.应提供安全移除和更换的方法。
也可见6. 4.4c)中的3)。
6.3. 5.6安全进入机器的措施
机器的设计应使得操作及与殳* 如果无法实现,为了执行X
意确保这类平台或阶梯玉
在工作条件下,步J
竈维护相关的所有常规
,餐設能由人员在地面完成。
EjXl近机器的危险区。
区应0伝用防滑材料防滑,并且根据步行区距
(见 GB 17888.3)。/
在大型自动戒备 进入位于/高/
子的安全护笼)/必∕⅛,还应弟防止人员从高处跌落 pF降控制φ⅛⅛ h都应朝叫安全的伊'覧•号*雞 认辅助礴摩辭,把手A;'.'';'
|
的机械的轿厢 | |
|
只要有可 |
M |
|
应提供必 |
M的 |
|
助设施。 |
[ |
|
如果提升 |
F物! |
|
台时发生人员 |
•落。 |
详细规定D
&或其他设施;但是,宜注
提供适当的护栏
響维聲幡笛边嘻笛理監桥 儿器部件的设施应提供防止跌落的措施(如楼梯、阶梯 £W为防止人员从高处跌落福个体防护装备提供锚定J
栏和/或梯
F提升人员
入时的辅
/'或人员的机械包
仲防护装質打开时,应防
*888。A
连锁防护装
层没有平
6.4使用信息
6.4. 1 一般要求
6.4. 1. 1起草使用信息慝假谖部分(见图2)。使用色夕度夸标记、信号、符号或 图表等组成.以单独或联合E⅜ι∣q[f¾町Tniiji化「I TrmW雑供给专业和/或非专业 人员。
注:使用信息的结构和表述也可见GB/T 19678^^^"^^^^
6.4. 1.2应向使用者提供关于机器预定使用的信息.特别是考虑到机器的所有运行模式。
该信息应包含确保安全和正确使用机器所需的各项指南。因此,该信息应向使用者告知或警示剩 余风险。
适当时,该信息应指明:
-是否需要培训;
——是否需要个体防护装备;
可能需要的附加防护装置或保护装置(见图2的脚注d"
不应排除根据机器名称和描述可合理预见的机器用途•也应对不按使用信息中描述的方式而按其 他方式使用机器而产生的风险进行警告,尤其是考虑到可合理预见的误用。
6.4. 1.3使用信息应以单独或组合的形式涵盖机器的运输、装配和安装、试运转、使用(设定、示教/编 程或过程转换、操作、清洗、故障査找和维护)以及必要的拆卸、停用和报废。
6.4.2使用信息的位置和属性
根据风险、使用者需要使用信息的时间和机器的设计,应决定在下述位置是否需要提供使用信息或 部分信息:
a) 在机器内或机器上(见6.4.3和6.4.4);
b) 在随行文件中(特别是使用手册.见6.4.5);
C)在包装上;
d)通过其他方式,如机器外的信号和警告。
在给出警告等重要信息时,应考虑采用标准化的语言(也可见GB/T 19678)o 6.4.3信号和警告装置
銷T听多k加报警器)可能用作警割Ih 【歹崗帳护措施前用作警示操作者(见6.
要求:
之前发出;
视觉信号(如闪光灯
速。此类信号也可項
这些信号应X
在危整牛
含义加丿
C)能咖編觉到*与所用的其他所有信号相区分;
容,被狗者和其&人员明确识另二^ ⅜
h "计和位置察便于检乏使用信恵应掌編警囊置需要定繭厲査J
-----― •疲劳这 M
警告装置被
废弃。
注:通常
[就此问题与
6.4.4标愚
(象形图)
以Fk所仃必要的标志:
楚与地址;
序列号(Z_有
1)
2)
3)
表明其符合强制倒恐J粽A
1) 标志;
2) 书面描述.如制造商的曲
C)针对安全使用的标志,例如:
D旋转部件的最高转速;
2) 工具的最大直径;
3) 机器本身和/或可移除部件的质量(kg);
4) 最大工作载荷;
5) 穿戴个体防护装备的必要性;
6) 防护装置的调整数据;
7) 检査频次。
直接印刷在机器上的信息宜持久.并在预期的机器生命周期内保持清晰可见。
符号或书面警告不应只写“危险”二字■
标志、符号和书面警告应易于理解且含义明确.特别是那些与机器功能相关的部分。与使用书面警 告相比.宜优先使用易于理解的符号(象形图)。
只宜采用机器使用时所处文化氛围内能够理解的符号和象形图。
机械的书面警告宜采用首次使用该机械的国家的语言,如有要求•可采用操作者容易理解的语言。
注:某些国家对特殊语言的使用有专门的法律要求.
标志应符合公认的标准(如GB/T 3168,ISo 2972或ISO 7000,特别是象形图、符号和颜色)。
有关电气设备的标志见GB 5226. 1.
有关液压和气动设备的标志见GB/T 3766和GB/T 7932o
6.4.5随行文件(特别是使用手册)
6.4.5. 1 内容
使用手册或其他书面说明(如包装上的说明)应包括:
a) 关于机器运输、搬运和贮存的信息.如:
D机器的贮存条件;
2) 尺寸、质量、重心位置;
3) 搬运说明(如显示提升设备施力点的图样)。
b) 机器安装和试运转的有关信息,如:
1) 固定/锚定以及噪声和振动抑制的要求;
2) 装配和安装条件;
3) 使用和维护所需的空间;
4) 允许的环境条件(如温度、湿度、振动、电磁辐射);
5) 机器与动力源的连接说明(尤其是关于防止电气过载的说明);
6) 关于废弃物的清除/处置建议;
7) 必要时,给出使用者应采取的保护措施的建议,如附加安全防护装置(见图2的脚注d), 安全距离、安全符号和信号。
C)关于机器自身的信息.如:
1) 机器、机器配件、防护装置和/或保护装置的详细说明;
2) 预定的机器全部应用范围,包括禁止的用途.如果可能.还应考虑样机的变化;
3) 图表(尤其是安全功能的图解表示);
4) 由机器产生的噪声和振动数据.由机器排放的辐射、气体、蒸汽及粉尘等数据,以及参考使 用的测量方法(包括测量的不确定度);
5) 电气设备的技术文件(见GB 5226) l
6) 证明机器符合强制性要求的文件。
d)有关机器使用的信息,如:
D预定使用;
2) 手动控制器(执行器)的信息;
3) 设定和调整;
4) 停机的模式和方法(尤其是急停);
5) 设计者采取的保护措施无法消除的风险;
6) 由某些应用和使用某些配件后产生的特殊风险,以及关于此类应用必要的专用安全防护 装置的信息;
7) 可合理预见的误用和禁止的用途;
8) 用于修理和干预后重新启动的故障识别和定位;
9) 需要使用的个体防护装备.以及需要进行培训的信息。
e) 维护信息,如:
D安全功能检査的性质和频次;
2) 关于使用时可能影响操作者健康与安全的备件的详细说明;
3) 关于需要一定的技术知识或特殊技能,从而只能由熟练人员(如维护人员、专家)来完成的 维护工作的说明;
4) 关于无需特殊技能便可由使用者(如操作者)来完成的维护工作(如更换部件等)的说明;
5) 使维护人员能合理完成维护任务(尤其是故障查找任务)的图样和图表;
f) 关于拆卸、停用和报废的信息。
g) 关于紧急状态的信息.如:
D发生事故或损坏时应遵循的操作方法;
2) 所使用的消防设备类型;
3) 关于可能排放或泄漏有害物质的警告.如有可能.指明消除其影响的措施。
h) 需要相互明显区别开的为技术熟练人员提供的维护说明[上述e)3)]和为非熟练人员提供的 维护说明[上述e)4)]°
6.4.5.2使用手册的编制
以下要求适用于使用手册的编制和表述。
a) 印刷字体和大小应尽可能保证最好的清晰度。安全警告和/或注意事项宜使用颜色、符号和/ 或大号字体加以强调。
b) 应给出使用信息的初始版本以及采用首次使用该机械的国家的语言编写的版本。如果使用一 种以上的语言,则每一种语言都宜便于与其他语言区分.并尽量将译文和相关插图放在一起。
注:某些国家对特殊语言的使用有专门的法律要求.
C)只要有助于理解.宜为文字配插图。这些插图宜由详细的文字说明进行补充.从而能够找到手 动控制器(执行器)等的位置并识别出来。插图不宜与随行的文字说明分开,并宜按操作顺序 给出。
d) 以表格形式给出信息有助于理解时宜考虑以表格形式给出,表格宜靠近相关的文字说明。
e) 宜考虑使用颜色,尤其是对于要求快速识别的组件。
f) 如果使用信息很长.则宜给出内容的列表和/或索引。
g) 包含有需要立即采取的措施的安全相关说明书.宜以便于操作者可随时获取的形式给出。
6.4.5.3使用信息的起草与编辑
以下要求适用于使用手册的起草和编辑。
a) 与样机的关系:该信息应明确的与机器的特定样机及必要的其他合适证明(如通过序列号)相 关联。
b) 信息传递原则:准备使用信息时,为了获得最佳效果宜遵循,•察看一思考一使用”的信息传递过 程和顺序。宜预先提出“如何做?”、“为什么?”等问题并给出答案,
C)使用信息应尽量简明,术语及单位前后的表述宜保持一致.对不常用的技术术语,宜给出明确 的解释。
d)如果预计机器将用于非专业使用.则宜以便于非专业使用者理解的形式编写说明书。如果为 安全使用机器而需要使用个体防护装备时.则宜在机器和包装等上面给出明确建议,使这类信 息在销售时得以明显显示。
e)文件的耐久性和可获得性:给岀使用说明的文件宜持久耐用(即能经受住使用者频繁拿取翻 看)。在文件上标出“留置备査"是很有用的。如果釆用电子形式(CD、DVD、磁带、硬盘等)保 存使用信息,则关于需要立即釆取措施的安全相关问题的信息应经常进行硬拷贝备份.供随时 获取。
7风险评估和风险减小的文件
风险评估和风险减小的文件应说明所遵从的程序以及得到的结果。该文件应包括下列内容:
a)已评估的机械(如规格、限制、预定使用);
e)
f)
g)
h)
i)
已做的任何相关假设(载荷、强度兰全系数等);
风险评估中所识别的危測丿乂底曷瞼
风险评估所依据的^—~
历史记录、适
的不确定性及其对风险评估的影响、
刻的风险减小目标;
危险或减小风险的保护措施;
1) 所使用的数
2) 与所使用,
通过保护
用于消用 与该碑 风险肃 风险#估
小经验等);
上述f)
注:本标
扌萨呼 W识界 ⅛f価剩I 确 果(见單1); 弱中完成的所有表格,
的用于
I求与机器二起提
附录 A
(资料性附录) 机器的图解表示
控制系统
操作部分
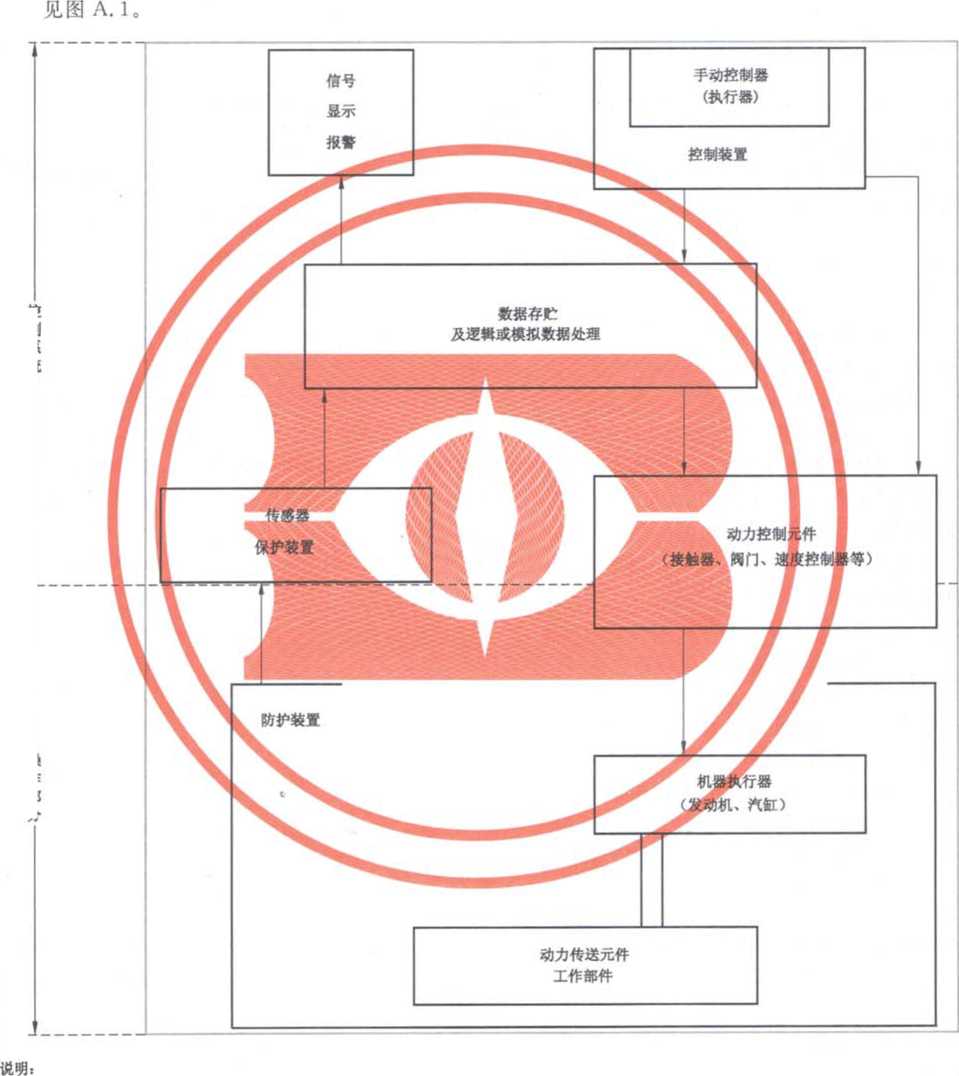
人机界面.
图A. 1机器的图解表示
附录B
(资料性附录)
危险、危险状态和危险事件示例
B. 1概述
本附录以单独的表格分别给出了危险(见表B. 1和表B. 2)、危险状态(见表B. 3)和危险事件(见 表B. 4)的示例,目的是阐明这些概念并帮助风险评估人员进行危险识别(见5.4)。
本附录给出的危险、危险状态和危险事件的清单既不是无遗漏的,也没有优先顺序,因此,设计者 还宜识别并记录机器中存在的其他危险、危险状态或危险事件。
B.2危险示例
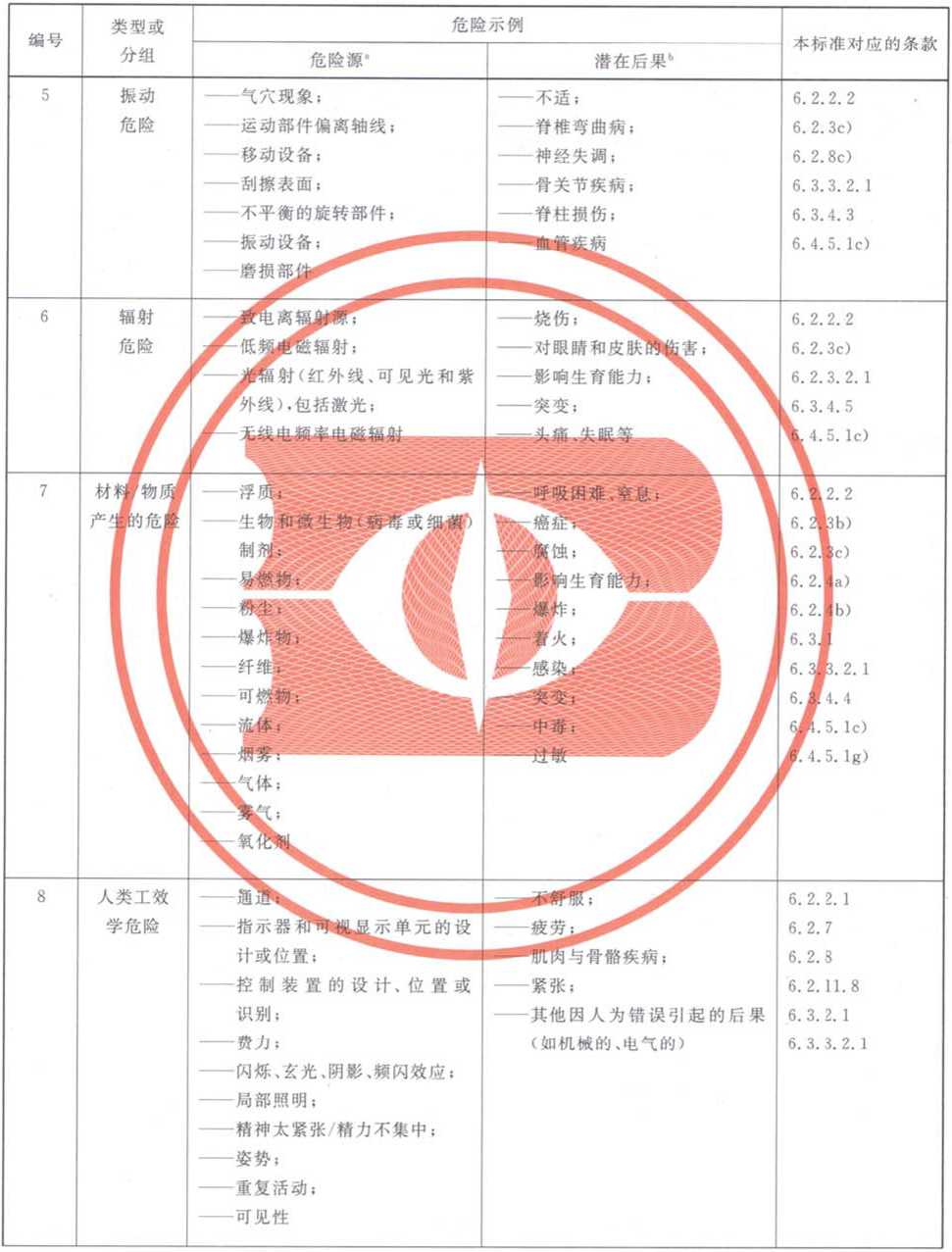
表B. 1按照危险的类型(机械危险、电气危险等)将其进行了分组。为了提供关于危险类型的更详 细信息,表中附加了两列,分别对应于危险源与潜在后果。
使用表B. 1中所列栏目的数量.取决于描述已识别危险所要求的详细程度■在某些情况下,只使 用一列就足够.尤其是当危险处在同一危险区并根据保护措施能分为一组时。使用哪一列取决于危险 源或后果的性质对选择合适的保护措施是否是最有用的。然而,所有的危险都宜归档,即使与它们有关 的风险已由建议用于减小与另一种危险有关的风险的一种保护措施充分减小。否则.由于另一种危险 的减缓而充分减小了未归档的危险产生的风险,从而忽略未归档的危险。
表B.1中,用一列以上描述一种危险时.不宜照搬这些条目。宜选择和组织合适的文字,以最方便 的方式描述危险。例如:
——由运动元件引起的挤压;
-因机器或机器的一部分缺乏稳定性引起的挤压;
由于在故障状态下电气设备部件变为带电部件引起的电击或触电;
——由于暴露在部件冲压产生的噪声中时间过长引起的永久性听力丧失;
一由于吸入有毒物质导致的呼吸道疾病;
由于不良姿势和重复动作引起的肌肉与骨骼疾病;
-由于接触高温材料引起的烧伤;
—— 由于皮肤接触(皮肤暴露于)有毒物质引起的皮炎。
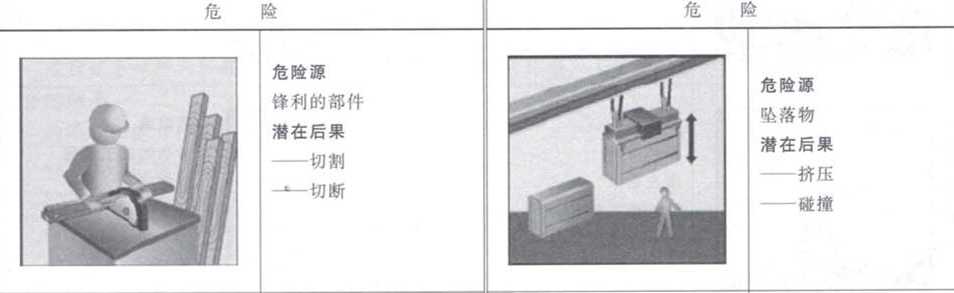
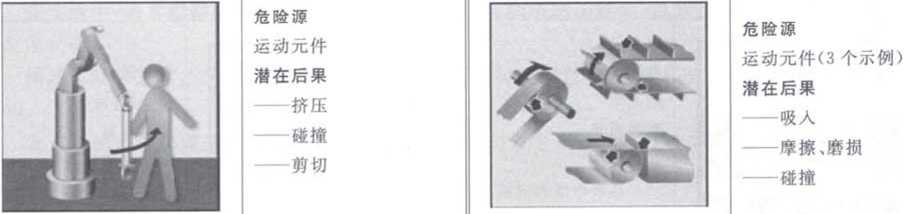
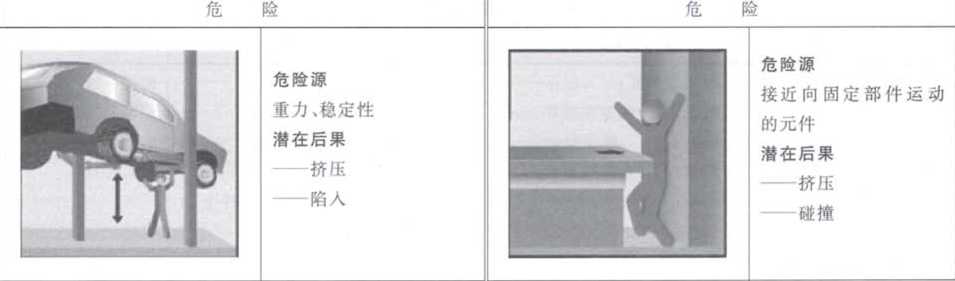
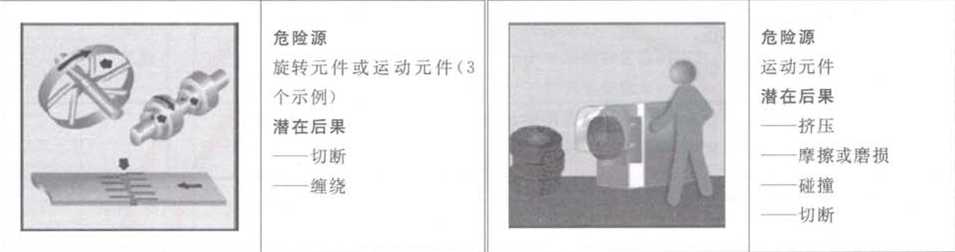
表B. 1危险
|
编号 |
类型或 分组 |
危险示例 |
本标准对应的条款 | |
|
危险源■ |
潜在后果h | |||
|
1 |
机械 危险 |
加速、减速; 有角的部件; 接近向固定部件运动的元件; 锋利的部件; 弹性元件; 一坠落物; |
—碾压; --抛出; --挤压; ——切割或切断; 一吸入或陷入; --缠绕; |
6. 2. 2. 1 6. 2. 2. 2 6. 2. 3a) 6. 2. 3b) 6. 2.6 6. 2. IO |
|
编号 |
类型或 分组 |
_______________危险示例_______ |
本标准对应的条款 | |
|
危险源' |
潜在后果b | |||
|
1 |
机械 危险 |
一重力; --距离地面高; --高压: --不稳定: —动能; --机械的移动; --运动元件; 一旋转元件; 粗糙表面、光滑表面; 一锐边; --储存的能最; —真空 |
摩擦或磨损; —碰撞: --喷射: ——剪切; 一滑倒、绊倒和跌落; --刺穿或刺破, --窒息 丄 |
6. 3.1 6.3.2 6.3.3
6. 3. 5. 4 6. 3. 5. 5 6. 3. 5. 6
6. 4.3 ".I 6. 4. 5 |
|
2 |
电气 危险 |
——电弧; 电磁现象; 静电现象3 --带电部件; 与高压带电部件之间无足够 的距离; --过载; 故障条件下变为带电的部件; --短路; —热福射 |
—烧伤; 一化学效应; 一医学植入物的影响; —电死; --坠落、甩岀; —着火; 熔化颗粒的射出; ——电击 |
6.2.9 6. 3.2 6. 3. 3. 2 6. 3. 5. 4 6. I.】 6.4.5 |
|
3 |
热危险 |
一爆炸; 一火焰; 一高温或低温的物体或材料, --热源辐射 |
—烧伤; --脱水; —不适; --冻伤; 热源辐射引起的伤害; —烫伤 |
6. 2. 4b) 6.2. 8c) 6.3.2.7 6. 3. 3. 2. 1 6. 3. 4. 5 |
|
4 |
噪声 危险 |
气穴现象; 一排气系统; --气体高速泄漏; -加工过程(冲压、切割等); --运动部件: --刮擦表面; 不平衡的旋转部件; 气体发出的啸声; 磨损部件 |
--不适: 一失去知觉; 一失去平衡; 一永久性听觉丧失; 紧张; ―耳鸣; -疲劳; 其他因干扰语音传递或听觉 信号引起的(机械、电气)后果 |
6. 2. 2. 2 6. 2. 3c) 6. 2. 4c) 6. 2. SC) 6.3. 1 6.3. 2. Ib) 6.3.2. 5. 1 6. 3. 3. 2. 1 6.3.4.2 6. 4. 3 6.4.5. Ib)和 C) |
|
编号 |
类型或 |
危险示例 |
本标准对应的条款 | |
|
分组 |
危险源, |
潜在后果b_______ | ||
|
9 |
与机器使用 环境有关的 危险 |
粉尘和烟雾; 电磁干扰; 闪电; —潮湿; ——污染; —雪, —温度; ——水: —风; —缺賓 |
—烧伤; —轻微疾病, —滑倒、跌落; —窒息; —其他由机器或机器部件上的 危险源引起的后果 |
6. 2.6 6. 2. 11.11 6. 3. 2. 1 6. 4. 5. Ib) |
|
10 |
组合 危险 |
如重复活动+费力+环境温 度高 |
一如脱水、失去知觉、中暑 |
— |
・单个危险源可有儿种潜在后果。
对于每一类或每一组危险,某些潜在后果可与几个危险源相关。
表B. 2是表B.1的子表,包括一些典型危险的示例。每个危险源都有相联系的潜在重大后果。潜 在后果的顺序没有优先秩序。
表B.2典型危险示例
危险源
姿势
潜在后果
一不适
一疲劳
肌肉与骨骼疾病

来源
烟雾
潜在后果
——呼吸困难
一过敏
--中毒

危险源
控制装置的位置
潜在后果
——人为差错造成的
后果
——紧张
危险源
重力(大块固化材料)
潜在后果
倒塌、坠落
―挤压
塌陷/塌落
一窒息
一楔人/轧伤
B.3 危险状态示例
危险状态是指人员暴露于至少具有一种危险的那些环境。人员的暴露经常是由于执行机器的某项 任务的结果。
危险状态的一些示例有:
a) 靠近运动部件工作;
b) 暴露于部件喷出区域;
C)在负载下面工作;
CI)靠近极端温度的物体或材料工作;
e)工人暴露于噪声产生的危险。
在实践中,通常根据任务或任务的操作(压力机工件的手动加载和/或卸载、带电故障査找等)来描 述危险状态。
描述危险状态时,宜确保所分析的状态是根据可获得的信息(执行的任务、危险、危险区)来明确定 义的。
表B. 3给出了暴露于表B. 1中的一种或多种危险时可导致一种危险状态的任务清单。
表B.3可导致危险状态的任务清单
机器的生命周期阶段
运输
一提升;
——加载]
--包装;
--运输:
--卸载:
—拆包
装配和安装
丿戒M系统(如排气系统、污水装置)连接;
[梧动力源(如电源、压缩空气)连接;
—示范;
试运转
设定
示教/编程和/或过 转换
运行
、行程限制)的调整和设定義金十
原料的进给、填充、加载;
能测试、试验;
芝更换刀具、刀具设定;
—工件的夹紧/紧固;
--控制/检査;
—驱动机器;
—原料的进给、填充、装载;
——手动加载/卸载;
一机器功能参数(如速度、压力、力、行程限制)的微调和设定;
—运行期间的微小干预(如移除废料、消除堵塞、局部清洁)3
——操作手动操控器;
停止/中断后重新启动机器;
—管理;
—最终产品的验证

B. 4危险事件示例
表B. 4给出了在机械领域内可发生的危险事件示例。
一个危险事件可有多种原因。例如,控制装置的非预期致动或控制系统的故障都可导致因意外启 动而与运动部件接触。
每种原因都可能依次是另一事件或组合事件(事件链)的起因。
表B. 4危险事件示例
|
相关的危险源 |
危险事件 |
本标准中的条款 |
|
机器可接近部件的外形和/ 或表面情况 |
接触粗糙表面; —接触锐边、尖角和凸出部分 |
6. 2. 2. 1 |
|
机器的运动部件 |
—接触运动部件; ——接触旋转的开口末端 |
6.2.2,6. 2. 14.6. 2. 15 6. 3.1 〜6. 3. 3 6. 3. 5. 2〜6. 3. 5. 4 6. 4. 3〜6.4.5 |
|
机器、机器部件以及所使 用、加工和处理的工具和材 料的动能和/或势能(重力) |
—物体坠落或喷出 |
6.2.3,6. 2.5 6. 2.10-6. 2.12 6. 3. 2.1、6. 3. 2.2 6. 3. 2. 7 6.3.3 6. 3. 5.2,6.3.5.4,6.3.5.5 6. 4. 4、6. 4. 5 |
|
机器和/或机器部件的稳 定性 |
—失去稳定性 |
6. 2. 3a)和 b) 6. 2.6 6.3.2. 6、6. 3. 2. 7 6. 4. 3〜6. 4. 5 |
|
机器部件、工具等的机械 强度 |
——运行过程中断裂 |
6. 2. 3a)和 b) 6. 2. 11.6.2. 13 6.3.2,6. 3. 2.7 6. 3. 3. ɪ 〜6. 3. 3. 3 6. 3. 5.2、6.4.4、6.4.5 |
|
气动设备、液压设备 |
—运动元件的位移; --高压流体的喷射; —失去控制的运动 |
6. 2. 3a)和 b) 6.2.10.6.2. 13x6. 3. 2. 7 6. 3. 3. 1〜6. 3. 3. 3 6.3.5.4、6.4.4、6.4.5 |
|
电气设备 |
直接接触; 一击穿放电; ——电弧; --着火; 间接接触; --短路 |
6.2.4a) 6. 2.9.6. 2. 12 6. 3.2.6. 3. 3 6.3.5.4 6.4.4、6.4.5 |
|
控制系统 |
一机器的运动部件或机器夹持的工件跌 落或弹出; 一运动部件无法停止; 因保护装置被抑制(废弃或失效)引起 的机器动作; 失去控制的运动(包括速度改变), 一非预期的启动/意外启动; 一因控制系统失效或设计不当引起的其 他危险事件 |
6. 2.5 6. 2. 11-6.2. 13 6. 3. 5. 2〜6. 3. 5. 4 6. 4. 3〜6. 4. 5 |
|
相关的危险源 |
危险事件 |
本标准中的条款 |
|
材料和物质或物理因素(温 度、噪声、振动、辐射和环 境) |
--接触高温或低温物体; —有害物质的排放; —危险的噪声排放; 可干扰语言交流或声音信号的噪声 排放; --危险的振动排放; -危险的辐射场排放; 恶劣的环境条件 |
6. 2. 2. 2 6. 2. 3c) 6.2.4 6. 2.8 6. 3. 1 6. 3. 3. 2 6. 3.4 6. 4. 3〜6. 4. 5 |
|
工作站和,/或工作过程设计 |
一费力: 人为错误/不当行为(无意识的和/或由 设计所致的“ 工作区域丧失直接能见度; 使人疼痛和疲劳的姿势; 高频率的重复搬运 |
6. 2. 2.1 6. 2.7.6. 2.8 6. 2.11.8 6. 3. 5.5,6. 3.5.6 6. 4. 3〜6. 4. 5 |
附录C
(资料性附录)
本标准专用术语与表述的中文-英文索引
本标准中对应的章/条/附录
安全防护
3. 19;3.21;3.31?5; 5. 3.4;第 6 章
安全防护装置
引言;3. 19;3. 21;3. 26;3. 28;第 6 章
tɪon( SafetyJUnCuon)
'在第6章中
SafegUarding
SafegUard
丄6. 2.11.6; 6. 2. 11. 7. IJ 6. 2.11.7.2;
安全功能(安全相关功能)
3. 2. 5. 2)6. 3. 3. 3
26. 3.6. 3. 5;6. 4.1. 3;6. 4. 5.1 ;
(机器的)安装
搬运
绊倒/绊倒危
保持一运行播制装I
保护措施
5. 4 ;" 表B.3
ins∣^ffation (Of the machine)
3. I⅜i.l9∣ 3^0^21;
ho]4-tt>rtin COntrOl ■ P 口
|
保护装置 ∙ ∖ X |
PrOteCtiVe device |
6. 2. 13; 6. 3. 1;2j^.3.3; 6.3. 5.1; 6. 4. 1.2;6.4./T附多夕;表 B. 3;表 B. 4 |
|
(机器的)报废 |
scr‰ung(of a machine) |
5. 4j6^^6. jɪlf) |
|
报警器 |
I | |
|
暴露于危险 |
exposure |
1 ; 5. 5. 2. 3. 1 ; 5. 5. 3$ 6. 2. 11. 12S Wl;附录B |
|
(限制)暴露于危险 |
exposure to hazards (limiting) |
6. 2. 13;6. 2. 14;6. 2. 15 |
|
暴露值 |
exposure value |
3.41 |
|
爆炸性环境 |
explosive atmosphere |
6. 2. 4j6. 4.4b);附录 B |
|
(保护装置)被废弃 |
defeating (Ofa PrOteCtiVe device) |
6. 2. 11. 1;附录 B |
|
(报警装置)被废弃 |
defeating (Of a Warning device) |
6. 4.3 |
|
本质安全设计措施 |
inherentIy Safe design measure |
3. 20;3. 21¾6.1∣6<216. 3. 5. 1 |
|
边(锐边) |
edge (SharP) |
6. 2. 2. 1;6. 3. 3. 2.6;附录 B |
|
便携式控制单元(示教盒) |
POrtable COntrOl unit (teach Pendant) |
6. 2. 11.8e)j6. 2. 11.9 |
|
中 文 |
_________英 文_________ |
本标准中对应的章/条/附录 |
|
标志 |
marking |
6. 4.4 |
|
补充保护措施 |
COmPIementary PrOteCtiVe measures |
3. 19;图 ItS 2;6. 1;6. 3.5 |
|
步行区 |
walking area |
6. 3. 5. 6 |
C
5. 2c) J 5. 3. 5 ; 5.4$ 5. 5. 2. 3. 1 ; 5. 6. 3;
材料和物质产生的危险
6. 2. 2. 1 ; 6.2.3b); 6. 2. 14; 6. 3. 2. 5. 1 ;
material
充分的风
restart restantng
——f~ɪ------
6. 2. 11. 1 ;6.鬢11. 4jδ. 3. >5. 2; 6. 3. 3. 2. 5:
操作部分
测量方法
(机器的)拆
缠绕危险
击
冲击危险
重新启动/重*启曰
触发(功能)
传感器
刺伤/刺穿危险
存在感应
(人的)错误
B. 1.
erative Part
6. 2.诘:2.H■附录A
OPeratOr
nɪeasuremenɪ methods
tripping (function)
3. 28. 5;6. 3. 2.JFl ;6.>2. 5. 3
SenSOr
皿ng / PUnCtUre hazard
erro^⅜⅛Lιrnan)
操作者
超速
i. 3. 3. 2.1∣6. 3. 3. 2. 6;6. 3. 5. 6;附录 B
ds gener<
Stanc<
3. 31 ; 5. 3. 4 ; 3. 1 ; 5. 5. 3. 6 : 5. 6. 2 ;
第6章中大量
13j6.4.3∣附录 A
5* 1 ; 6. 3. 2. 5. 3
|
(电气设备的)带电部件 |
live Part (Of electrical equipment) |
表 B. 1.2 . |
|
带防护锁定的联锁防护 装置 |
interlocking guard With guard IOCking |
3. 27. 5;6. 3. 2. 2;6. 3. 2.3 |
|
带启动功能的联锁防护装置 (带控制功能的防护装置) |
interlocking guard With a Start function (COntrOi guard) |
3. 27. 6;6. 3. 2. 3f);6. 3. 3. 2.5 |
|
电磁兼容 |
electromagnetic ComPatibiIity |
6. 2. 11.11 |
|
电击 |
electric ShOCk |
3. 6;6. 2. 9;附录 B |
|
电气过载 |
electrical OVerIOading |
6. 4. 5. Ib) |
|
电气设备 |
electrical equipment |
6. 2. 4 ;6. 2. 9 :6. 4. 4 ;6. 4. 5. IC) |
|
中 文 |
英 文 |
本标准中对应的章/条/附录 |
|
电气危险 |
electrical hazard |
3.6j6. 2.9;附录 D |
|
跌落危险 |
failing hazard |
附录B |
|
定向失效模式组件 |
Oriented failure mode COmPOnent |
6. 2. 12. 3 |
|
动力传送元件 |
POWer transmission element |
附录A___________________ |
|
动力控制元件 |
PoWer COntroi element |
3.31:附录A |
|
动力源 |
POWer SUPPIy |
3. 31 ; 3. 32 ; 5. 3. 3 ; 5. 4 ; 6. 2. 10 ; 6. 2. 11.11 6. 2. 11. 2; 6. 2. 11.5; 6. 3. 2.4; 6. 3. 2. 5. 3∣ 6. 3. 5.4j6. 4.5.1;表 R 3 |
|
断开/断开装置 |
trip / tripping device |
6. 3. 2. 1 |
|
对健康产生的损伤或危害 |
damage to health |
3.5 |
|
E | ||
|
(储存能批的)遏制 |
COntainment (Of StOreei energy) |
6. 3. 5.4 |
|
F | ||
|
阀门 |
VaIVe |
6. 2. 3;6. 2.11.4 |
|
防护锁定装置 |
guard IOCking device |
3. 27.5 |
|
防护装置 |
guard |
3. 20;3. 26; 3. 27; 3. 28. 1» 6. 2.8; 6. 2. 11. 9∣ 6. 2. 13; 6. 3.11 6. 3. 2; 6. 3.3» 6∙3∙5∙6; 6.4.1.116. 4. 4c)j6. 4. 5. Ic);附录 A |
|
访问口令 |
access COde |
6. 2. 11.10 |
|
防止进入 |
PreVentiOn Of access |
6. 3. 3. 2. 1 |
|
粉尘(也可见:排放物) |
CiUSt(See also:emissions) |
|
|
风险 |
risk |
3.12;大量出现 |
|
风险比较 |
risk COmPariSOn |
5. 5. 2. 3. 2;5. 6. 1 |
|
风险分析 |
risk analysis |
3. 15;3. 16:3. 17;5. 1 |
|
风险估计 |
risk estimation |
3. 14;3. 15;5. 1 ;5. 5 |
|
风险减小 |
risk reduction |
3.7$3.16$ 3.18; 3.191 第 4 戳;图 1,图 2; 5.1 ;5. 5. 3. 4;5. 6. 1 »5. 6. 2;第 6 章 |
|
风险评估 |
risk assessment |
3.8;3. 17;3.41;第 4 章;第 5 章;6. 3. 2.1» 6. 3. 2.4>6. 3. 5.2;第 7 章 |
|
风险评价 |
risk evaluation |
3. 16;3. 17j5. 1;5.6 |
|
锋利的部件 |
CUtting PartS |
附录B |
|
符号 |
SymbOl |
3. 22:6. 4.1;6. 4.4 |
|
(使用手册中的)符号 |
SymbOi (in Ihe instruction handbook) |
6. 4. 5. 2a) |
|
辐射(也可见:排放物) |
radiation(see also:emissions) |
3.41; 6. 2. 2. 2; 6. 2.3; 6. 3. 2.11 6. 3. 2. 5.1 ; 6.3. 3. 2. 1;6. 3.4.5∣6.4. 5. 1;附录 B |
|
中 文 |
英 文 |
本标准中对应的章/条/附录 |
|
辐射危险 |
hazards generated by radiation |
表 B. 1.6 |
|
G | ||
|
干扰 |
disturbance (S) |
5.4b)t6. 2.12.2;6. 2. 12.4;附录 D |
|
高压流体喷射危险 |
high PreSSUre fluid ejection hazard |
表 K 1. 1;表 R4 |
|
隔离和能址耗散 |
isolation and energy CIiSSiPatiOn |
6. 2. 11. 1;6. 3. 2. 4;6. 3. 5. 4;表 B. 3 |
|
工作部件 |
WOrking Part |
6. 2. 11.2;附录 A |
|
共模失效 |
COmmOn mode failures |
3. 36 ⅜ 6. 2. 12.4 |
|
共因失效 |
COmmOn CaUSe failures |
3. 35; 6. 2. 12.4 |
|
构造、结构 |
COnStrUCtiOn |
6. 2. 3a) ;6. 3. 3.1 ;6. 4. 4 |
|
固定式防护装置 |
fixed guard |
3.27. 1; 6. 3. 1; 6. 3. 2.1 ? 6. 3. 2. 2a) i 6. 3. 2. 5. 2;6. 3. 3. 2. 2 |
|
故障 |
fault |
3.33; 3. 34; 3. 36; 6. 2. 11. 1; 6. 2. 11.6; 6. 2.11.7.1; 6. 2.11. 7.2; 6. 2.11.9; 6. 2.11.12; 6. 2.141 6. 3. 2. 5. 2; 6. 4. 5. Id); 6. 4. 5. Ie) |
|
故障査找 |
fault-finding |
|
|
过程转换 |
PrOCeSS ChangeOVer |
5. 5. 3. 2 ; 6. 2. 11.9: 6. 3. 2. 4 ; 6. 4. 1.3; 表B.3 |
|
过载(电气) |
OVerIOading (electrical) |
6. 4. 5.1 |
|
过载(机械) |
overloading (Mechanical-) |
6. 3. 2.7 |
|
H | ||
|
忽视人类工效学原则产生 的危险 |
hazards generated by neglecting ergo-TlomiC PrinCiPIeS |
表 R 1.8 |
|
滑倒危险 |
SliPPing hazard |
6. 3. 5.6;表 B. 1 |
|
环境 |
environTnent |
第 1 章;6. 2. 7; 6. 3. 2.1 ; 6. 3. 3. 1 ; 6. 4. 5. Ib); 附录B |
|
环境条件 |
environmental COnditiOnS |
6. 2. 12. 2;6. 3. 2. 5. 2a);6. 4. 5. lb);附录 B |
|
活动式防护装置 |
movable guard |
3. 273 27. 2$3. 27. 3;6. 3. 3. 2. 3 |
|
J | ||
|
机器/机械 |
machine / machinery |
3.1 |
|
机器的寿命限制 |
life limit Of a machine |
5. 3.4 |
|
机器的组合 |
assembly Of machines |
3.1∣6. 2. 11. 1 |
|
机器一动力源接口 |
machine-power SUPPly interface |
5. 3.3 |
|
机械危险 |
mechanical hazard |
3. 6;6. 2. 2.2j6. 3. 1;附录 B |
|
中 文 |
英 文 |
本标准中对应的章/条/附录 |
|
人类工效学原则 |
ergonomic PrinCiPIe |
5. 2d) ∣5. 5. 3. 4 ;6. 2. 8:6. 2. 11. 8;6. 3. 2.1 |
|
人类习惯 |
human behaviour |
3. 24j5.4j5. 5.3.5;附录 B |
|
任务 |
IaSk |
3. 25 : 5. 4 ; 5. 5. 3. 2 ; 6. 3. 2. 4; 6. 3. 5. 6 ; 6.4. 5. 1 |
|
(材料等的)容纳 |
COntainment (Of materials*etc.) |
6. 3. 3. 2. 1 |
|
冗余 |
redundancy |
6. 2. 12.2:6. 2. 12.4 |
|
软件 |
SOftWare |
3. 34:5.4)5.5. 3. 6∣6. 2. 11. 7. 3 |
|
(访问)软件 |
SOftWare (access to the) |
6. 2. 11.7.3 |
|
润滑 |
lubrication |
6. 2.15;表 B.3 |
|
S | ||
|
烧伤 |
burn |
附录B |
|
设定 |
Setting |
6. 4. 5. 1;表 B.3 |
|
设定(用于控制模式) |
Setting (COnlrOl mode for) |
6. 2. 11.9 |
|
设定点 |
Setting POint |
6. 2.15 |
|
(机器的)设计 |
design (Ofa machine) |
第4章:5.2,5.5;第6章 |
|
设计错误 |
design error |
5. 4b) |
|
设计者 |
designer |
引言;第 1 章;3.8;3. 13;3. 19,3. 24;第 4 章; 图 2; 5. 4; 5. 5. 11 5. 6. Ii 6. 2. 8; 6. 3. 2. 5. 1 ; 6. 4.3;6.4.5. Id) |
|
剩余风险 |
residual risk |
3. 13;5. 6. 2;6. ɪe)16. 4.1.2)第 7 章 g);图 2 |
|
失灵 |
malfunction (malfunctioning) |
3. 32; 3. 37; 3. 38; 5. 2c )» 5.3.2a); 5. 4; 5. 5. 2. 3. 1j5. 5. 3. 4a);6. 2.12.2∣6. 3. 2. 1 |
|
失效 |
failure |
3. 30 ∙* 3. 34 ; 3. 35 〜3. 38 ; 5. 4 ; 5. 5. 3. 5 ; 6. 2.10; 6. 2. 11. 1; 6. 2.11.6; 6. 2.11.7.1; 6. 2. 11. 7. 2 ; 6. 2. 12 ; 6. 3. 3. 2. 3 ; 6. 3. 3. 2. 5f) |
|
施力点 |
application POint |
6. 4. 5. ɪa) |
|
湿度 |
moisture |
6. 2.12. 2;6. 4. 5. Ib)I表 B∙ L 9 |
|
使能装置 |
enabling device |
3. 26. 2;6. 2. 11. 9 |
|
(机器的)使用 |
USe (Ofa machine) |
第4章l5.2∣5. 3.2∣5.4以及大量出现 |
|
使用手册 |
instruction handbook |
图 2 ; 6. 4. 2 ; 6. 4. 5 |
|
使用信息 |
information for USe |
3. 19; 3. 22; 5. 2a ) ; 5. 5. 1 ; 5. 5. 2. 3. 3c ); 5. 5. 3.8;6. 1;6. 4 |
|
中 文 |
英 文 |
本标准中对应的章/条/附录 |
|
示教(可编程) |
teaching (PrOgramming) |
5. 4;5. 5. 3. 2;6. 2. 11. 9;6. 3. 2. 4;6. 4.1. 3 |
|
示教盒(便携式控制单元) |
teach Pendant (POrtabIe COntrOI Unit) |
6. 2. 11.8j6. 2. 11. 9 |
|
试运转 |
commissioning |
5.4:6.4. 1.3:6. 4. 5. lb);附录 B |
|
手动控制(功能) |
manual COntrOl (function) |
6. 2. 11.8 |
|
书面警吿 |
Written Warning |
6. 4.4 |
|
双手操纵装置 |
two-hand COntrOl device |
3. 28. 4$6. 2. 11. 9∣6. 3. 2. 3e) |
|
说明书 |
instructions |
6. 4. 5. 1 j6. 4. 5. 2 |
|
速度 |
SPeed |
6. 2. 11. 1; 6. 2. 11. 9; 6. 3. 2.7; 5.4.4c);附 录B |
|
(使用手册的)索引 |
index (Of the instruction handbook) |
6. 4. 5. 2 |
|
T | ||
|
烫伤 |
SCaId |
表B. 1・3,表B. 2 |
|
(人员的)逃生和救援 |
escape and rescue (Ofa PerSOn) |
6. 3. 5. 3 |
|
提升设备 |
Iifting equipment |
6. 4. 5. Ia) |
|
提升装置 |
Iifting gear |
6. 3. 5. 5 |
|
停用 |
disabling |
6. 2.6:6. 4.1. 3;6. 4. 5. If);附录 B |
|
停止 |
StoPPing |
5.4t6. 2.11.1;6. 2. 11.3t6. 2. 11.5j6. 2.11. 6; 6. 3∙ 2. 5.1 ; 6. 5.1 |
|
通道 |
WaIkWayS |
6. 3. 5. 6 |
|
凸出部分 |
PrOtrUding Part |
6. 2. 2. 1 ;表 3 4 |
|
W | ||
|
危险 |
danger |
6. 4. 4c) |
|
危险 |
hazard |
經;3.7;3.8;3.9以及大量出现 |
|
危险区 |
'danger ZOne (See also:hazard ZOne) |
3. 11; 3.28.5; 3. 29s 5. 5. 2. 3.1; 6. 2. 2. 1; 6. 2. 11. 8;6. 3. 216. 3. 3. 2. 4 »6. 3. 3. 2. 5 |
|
危险区 |
hazard ZOne (See also:danger ZOne) |
3. 11; 3. 28.5; 3. 29» 5. 5. 2.3.1; 6.2.2.1; 6. 2. 11. 8;6. 3. 2;6. 3. 3. 2. 4;6. 3. 3. 2. 5 |
|
危险失灵 |
hazardous malfunctioning |
6. 2. 12. 2 |
|
危险失效 |
failure to danger |
3. 32 |
|
危险识别 |
hazard identification |
3. 15;5. 1;5. 4l5. 5.1 |
|
危险事件 |
hazardous event |
引 ⅛ j 319 j 5. 4 j 5. 5. 2. 1 ; 5. 5. 2. 3. 2 ; 6. 4. 3 ; 第7章c);附录B |
|
危险状态 |
hazardous SitUatiOn |
3. 10⅜ 3. 38?第 4 章;5. 2d), 5.4? 5.5» 6. 2. 11.2j6.2. 11.5∣6. 3. 2.7;^ 7 章 c);附 录B |
|
危险组合 |
hazard COmbinatiOn |
5. 5. 3.3;附录 B |
|
中 文 |
英 文 |
本标准中对应的章/条/附录 |
|
维护 |
maintenance |
3. 3 { 3. 331 5. 3. 2c) ; 5. 3. 3b) ∣ 5. 4 J
6. 3. 3. 1 ; 6. 3. 5. 4 ; 6. 3. 5. 6; 6. 4. 1. 3; 6. 4. 5. lb)s6. 4.5. Ie) «6. 4. 5. Ih);表 B.3 |
|
维护点 |
maintenance POint |
6. 2.15 |
|
维护人员 |
⅝⅛^^12{6. 4. 5. Ie)__________________ | |
|
(机器的)维修性 |
12 | |
|
稳定性 / |
6. B |
卸载(卸料)/1载警料) 操作I ¾
6. 4. 4c)
2.10*. 3. <6(6. 3. 2. 7
显示
限制
限制进入
限制装置
相关危险
象形图
卸压
信号
旋转部件的最高转速



display
6. 2.8;6. 2.11. A
6. 4. 2; 6. 4. 3; 6. 4. 5J
Y
|
(人的)压力 | ||
|
压敏垫 |
Pressu^^wιsitɪve mat |
6. 2. 5. 1 |
|
颜色 |
colour |
6. 4. 4c) ;6. 4. 5. 2a) ∣6. 4. 5. 2e) |
|
液压设备 |
hydraulic equipment |
6. 2. 10;表 B∙4 |
|
液压危险 |
hydraulic hazard |
6. 2. 10 |
|
抑制阶段 |
muting PhaSe |
6. 3. 2. 5. 2d) |
|
(机器的)易用性 |
USabiiity (Of a machine) |
3.4;第4章;5.6.2;6.3. 3. 2. 1 |
|
意外启动/非正常启动 |
UneXPeCted / UnintCnded Start-UP |
3. 6;3. 31;6. 2. 11. 1«6. 3. 3. 2. 5 |
|
应力(环境) |
StreSS (environmental) |
6. 2. 12. 2 |
|
应力(机械) |
StreSS (mechanical) |
6. 2. 3a)∣6. 3. 2. 7 |
|
应用范围 |
range Of applications |
6. 4. 5. IC) |
|
有害物质 |
hazardous SUbSlanCeS |
3. 41 ;6. 2. 3c);6. 3. 3. 2. 1 ;6. 3. 4. 4 |
本标准中对应的章/条/附录
有限运动控制装置
limited movement COntrOl device
3. 28. 9; 6. 2. 11.9
有源光电保护装置
active optoelectronic PrOteCtiVe device
3. 28. 6:6. 3. 2. 5. 3;6. 3. 3. 3
语言
IangUage
6. 4. 4
(使用手册的)语言
IangUage (Of the insiruciion handb∞k)
6. 4. 5. 2b)
引言;3.3j3.6;3. 23;第 4 章;5. 3.2,5. 3.4;
(机器的)预定使用
intended
VibratTi
emissions)
a machine)
运动元件/部件
5. 3. 3b)∣5. 4;5^3. 21
OPeratiOn
运行模式
6. 2. 11. 1 〜
诊断系统
$*12: 5. 2l);
): ≡6. 2.
5. 4?6. 3. δJ‰∙4. 1‰6. 4. 5. la);表 B. 3
o7 41 ; 4 ; 6. 2. 2. 2 ; 6∙ 2. 3 ; 6.2.6;
∖; 6. 2. 12. 2 ; 6. 3. 2. 1 ; 6. 3. 3. 2. 1 ;
6. 4. 5. 1;表 B 1.5
⅛⅛⅛> i ∣kl; ∖2. 1B1; 6.2. 11. 10; ∖
6. 2. 8e)t6.J^. 1:»B. 1
∣4 ; 6. 2. 2. 2;
IC ) i 6. 3. 1 :
di 辺卜JjCSyStem
15» 5. 3. 6: 5. 6. 3 ; 6. 1 ; 6. 2. 8g ) ; 6∙ 2∙ 12. 2 ;
3. 5. 1;6.4. 1.2;6.4.4;6. 4. 5. 1;
6.
7靈〔3:2葛6*4 2#1. 5>b)s6. 4. 5. 1c):
費蒙事2.2.1十2.
6. 2. 2. 6:6. 3.∣. 7
elements ; PartS
振动(也可见:排放物)
振动危险
hazards generated by VibratiOn
|
载荷[[ | ||
|
噪声(也可日 |
π *放 | |
|
噪声危险 ∖ | ||
hazards generated by noise
蒸汽、气体
VaPOUr,gas(see also:emissions)
6. 4. 5. 1
正常运行
normal OPeratiOn
3. 38; 5. 5. 2. 3. Ia )» 6. 3. 2. 1 ; 6. 3. 2. 2f
6.3. 2. 3
执行器(机器)
actuator ( MaChinC)
6.2.4;附录 A
执行器'手动控制器
actuator / manual COntrOl
3. 28.3; 6∙2. 2.1; 6. 2. 8g) ι 6. 2. 11.8?
6. 3.5.2∣6. 4. 5. ld);6. 4. 5c);附录 A
直接机械作用
positive mechanical action
6. 2.5
直接接触
direct COntaCt
|
中 文 |
英 文 |
本标准中对应的章/条/附录 |
|
重大危险 |
Signifɪeant hazard |
3.8 |
|
重心 |
Centre Of gravity |
6. 2. 6 ;6. 4. 5.1 |
|
(机器的)贮存 |
StOrage (Ofa machine) |
6. 4. 5. Ia) |
|
装配 |
assembly |
5. 4;6. 4. 1.3:6.4.5. lb);表 B.3 |
|
自动监控 |
automatic monitoring |
6. 2. 11. 6;6. 2. 12.4;6.3.3.2.3,6, 3∙3∙2∙5 |
|
阻挡装置 |
impeding device |
3. 29 |
|
下划线:第3章规定的术语。 粗体字:本标准中的重要章节。 | ||
参考文献
[1] ⑵
[4]
GB/T 3168
GB T 3766
GB 3836. 4
GB 3883. 1
数字控制机床操作指示形象化符号
液压系统通用技术条件
爆炸性环境 第」部分:由本质安全型“i”保护的设备 手持式电动工具的安全第一部分:通用要求
[5] GB 4706家用和类似用途电器的安全第1部分:通用要求
[6] GB 5226(所有部分)机械安全机械电气设备
[7] GB/T 7932气动系统通用技术条件
[8] GB/T 8196机械安全防护装置固定式和活动式防护装置设计与制造一般要求
[9] GB 12265. 3机械安全避免人体各部位挤压的最小间距
[10] GB 14048. 5低压开关设备和控制设备第5-1部分控制电路电器和开关元件机电式
控制电路电器
[11] GB/T 15241人类工效学与心理负荷相关的术语
[12] GB/T 15241.2与心理负荷相关的工效学原则 第2部分:设计原则
[13] GB/T 16251工作系统设计的人类工效学原则
[14] GB 16754机械安全急停设计原则
[15] GB/T 16855. 1-2008机械安全控制系统有关安全部件第1部分:设计通则
[16] GB/T 16856.2机械安全风险评价第2部分:实施指南和方法举例
口7] GB/T 17161机床控制装置的操作方向
[18] GB/T 17454(所有部分)机械安全压敏保护装置
口9] GB 17888(所有部分)机械安全进入机械的固定设施
[20] GB 17888.3机械安全进入机械的固定设施第3部分:楼梯、阶梯和护栏
[21] GB 18209(所有部分)机械安全指示、标志和操作
[22] GBT 18831机械安全带防护装置的联锁装置设计和选择原则
[23] GBT 18569. 1机械安全 减小由机械排放的危害性物质对健康的风险 第1部分:用于
机械制造商的原则和规范
[34]
蔽减小辐射
[35] ISO 2972 NUmeriCal COntrOl Of machines SymbOlS
[36_ ISO 7000 GraphiCal SymI)OIS for USe On equipment InCIeX and
[37] ISO 9355-1 ErgOnOmiC requirements for Ihe design Of CIiSPIayS and COntrOl actuators
机械安全防止意外启动
机械安全 双手操纵装置 功能状况及设计原则
说明书的编制构成、内容和表示方法
机械安全 与人体部位接近速度 相关防护设施的定位 声学隔声罩和隔声间噪声控制指南
GB T
GB/T
GB/T
GB/T
GB/T
GB/T 20000. 4标准化工作指南 第4部分:标准中涉及安全的内容
GB/T 20438(所有部分)电气/电子可编程电子安全相关系统的功能安全
GB/T 22156声学机器与设备噪声发射数据的比较方法
GB 23821机械安全防止上下肢触及危险区的安全距离
GB T 26118. 1机械安全 机械辐射产生的风险的评价与减小
GB T 26118. 3机械安全 机械辐射产生的风险的评价与减小
19670
19671
19678
19876
19886
第1部分:通則
第3部分:通过衰减或屏
SynOPSiS
Part 1 : HUman interactions With CIiSPIayS and COntrOI actuators
• OOLZL OS∖ZLOZI9ozm--ΛID
[38〕 ISC) 9355-3 ErgOnOmiC requirements for the design Of displays and COntrOI actuators— Part 3 :COntrOl actuators
[39] IS()∕TR 11688-1 ACOUStiCS—ReCOnImended PraCtiCe for the CIeSign Of IOW-HOiSe machinery and equipment—Part 1 : Planning
[40] ISO 14163 ACOUStiCS (JUidelineS for noise COntrOI by SiIenCerS
[411 IEC 61000-β(all PartS) ElCCtrOmagneliC COmPatibiIity (EMe)—Part 6:GeneriC StandardS
[42] IEC 61029(all PartS) Safety Of IranSPOrIabIe motor-operated electric tools
[43一 IEC 61496(CilI PartS) Safety Of machinery—EleCtro-SenSitiVe PrOteCtiVe equipment
[44一 IE(' ΓS 62046 SafCty Of machinery—APPliCatiOn Of PrOteCtiVe equipment to detect the PreSenCe Of PerSOnS
[45] IEC 62061 Safety Of machinery~FUnCtiOnal Safety Of Safety-related electrical, electronic and PrOgrammabIe electronic COntrOl SyStemS
[46 IEV 191(见 IE(' 60050-191) Internaiional electrotechnical VOCabUIary ChaPter 191 : Dependability and CIUaIity Of SerViCe
一 !7一 CR 1030-1 Hand-arm VibratiOn—GUideIineS for VibratiOn hazards reduction— Part 1: En
gineering methods by design Of machinery
[48] EN 614-1 Safety Of machinery— ErgOnOmiC design PrinCiPIeS一Part 1: TerminOIOgy and general PrinCiPleS
L49] EN 1299 MeChaniCal VibratiOn and ShOCk -VibratiOn isolation Of machines InfOrnlatiOn for Ihe application Of SOUrCe isolation
[5。」 EN 13861 Safety Of machinery GUidanCe for the application Of CrgOnOmiCS StandardS in Ihe design Of machinery

GB/T 15706-2012
版权专有侵权必究
*
书号:155066 ・ 1-46155
定价: 57. OO元