d)
b)
a)
ICS 53.020.20
J 80
GB/T 13752—2017
代替 GB/T 13752—1992
塔式起重机设计规范
DeSign rules for tower CraneS
2017-02-28 发布
2017-09-01 实施
目 次
附录D (资料性附录)影响脆性破坏因素评价和钢材质量组别的选择
附录G (规范性附录)受压构件的计算长度和格构式构件的换算长细比
附录1(规范性附录)受弯梁构件侧向屈曲稳定系数(整体稳定系数)物
附录K (规范性附录)用于结构疲劳计算的构件连接应力集中情况等级和构件接头型式
附录M (资料性附录)塔式起重机机构电动机容量选择计算中的JC、CZ、G值
附录Q(规范性附录)形状系数K,、尺寸系数K八表面情况系数K “、腐蚀系数K的确定 ……186 附录R(资料性附录)卷筒壁和侧板厚度的计算方法
本标准按照GB/T很一2009给出的规则起草’
本标准代替GB/T 13752-1992«塔式起重机设计规范JL本标准与GB/T 13752—1992相比主要 变化如下:
a) 增加了 "前言对和“引言”(见“前肓”和“引言
b) 在“范围'中.由原来的适用于”电力駆动塔式起重机”,改为适用于*电力或内燃机(发动机)驱 动的塔式起重机七
C)对“总则”的内容作了以下变动(见第4章):
1) 増加了“验算”条款,规定了验算的基本原则,引入了能力验证的极限状态法*
2) 将GB/T 13752—1992“结构”中的“结构的工作级别''"载荷组合"和,'机构”中的“机构的工 作级别”调整到本标准的“总则'‘中,增加了机械零件的工作级别.
3) 将GB/T 13752- 1992》结构”中的“载荷组合”调整到本标准的“总则”中,对“载荷”载荷 组合''的内容作了较大的充实和修改,尤其是增加了与极限状态法有关的内容;
4) 对“抗倾覆稳定性和抗风防滑安全性*轨道和基础''等内容作了充实和修改*
d) 对“结构”的内容作了以下变动(见第5章損
1) 增加了按极限状态法进行设计计算的内容;
2) 增加了对钢材脆性破坏评价的内容;
3) 增加了销轴和管件焊接接头验算的内容;
4) 简化了压弯构件整体穏定性验算公式;
5) 给出了常用附着支撑的柔度计算公式'
6) 给出了精确的双吊点起重臂拉索力计算公式'
7) 给出了更为细化和精确的受斥构件计算长度系数$
8) 修改了结构疲劳强度验算的内容,
9) 适当调整了刚性要求'
10) 调整和充实了结构设计的构造要求;
e) 对"机构”的内容作了以下变动(见第6章);
1) 对于机构的设计计算,充实了电动机容量初选及验算,引入了机构设计的基本内容和机构 性能的简要计算等,增加了液压系统,爬升系统设计计算的内容等:
2) 对于机械零部件的设计计算,结合国内外技术发展现状和相关标准进行了修改和调整,例 如修改和充实了机械零部件疲劳计算、焊接和铸造卷筒设计计算等内容,
f) 对“电气”的内容作了以下变动(见第7章)=
结合国内外技术发展现状和相关标准进行了修改和调整,增加了无线遥控、电气调速与控制等 新内容。
本标准由中国机械工业联合会提岀。
本标准由全国起重机械标准化技术委员会(SAC/TC 227)归口口
本标准负壷起草单位q匕京建筑机械化研究院、中联重科股份有限公司、哈尔滨工业大学。
本标准参加起草单位:廊坊凯博建设机械科技有限责任公司,四川建设机械(集团)股份有限公司、 抚顺永茂建筑机械有限公司,北京华电万方管理体系认证中心、浙江省建设机械集团有限公司、山东丰 汇设备技术冇限公司、山东大汉建设机械有限公司,山东省特种设备检验研究院、湖北江汉建筑工程机
In
GH∕T 13752—2017
械有限公司、山东省德州生建机械有限责任公司,广西建工集团建筑机械制造有限责任公司■哈尔滨东 建机械制造有限公司、辽宁省安全科学研究院、辽宁连云建筑机械制造有限公司、山东省建筑科学研究 院、中国建筑第二工程局有限公司"工苏正兴建设机械冇限公司、云南冶金力神重工有限公司、上海市建 筑科学研究院科技发展总公司、山东鸿达重T机械制造有限公司,重庆长风机械制造有限贵任公司,北 京建研机械科技有限公司.
本标准主要起草人:田广范,陆念力、喻乐康、兰朋、易德辉、郑兴、胡宇智、罗文龙,兰建平、刘春林、 孙田%吴恩宁、们健康、康与宙,史勇、肖学全、文朝辉、刘晓东,林永、樊滨,秦可新、王晓庆、王乔、郭寒竹、 杨道华、赵勇、陈爱华•付剑雄、周晓荣、孙艳秋,
本标准所代替标准的历次版本发布情况为:
——GB/T 13752-I992o
OJ 本标准未包括塔式起重机设计的所有问题。本标准未涉及的内容,执行其他塔式起重机标准和 有关通用标准的规定。
0.2在保证塔式起重:机安全可靠的前提下,对于使用条件和工作要求不同的塔式起重机的设计,不要 求按本标准所列的全部内容逐项进行设计计算,例如,
——对已按塔式起重机的有关要求进行过审核或试验并取得合格认可的标准件(如标准的结构件、 机械或电气零部件),通常不必再作校核计算;
——对工作级别很低的塔式起重机,通常不必进行疲劳验算;
——对一台构造简单且较少使用的塔式起重机,或对一台由标准部件组成的起重机•其计算就可简 略J些』
0.3塔式起重机用户在确定订货要求及选购产品时,需特别注意确定和选择塔式起重机及其机构的工 作级别,用户需根据本标准恰当地提出塔式起重机的工作级别,如果可能还需进一步明确塔式起重机 各个机构的工作级别,以确保制造商能对其进行设计与制造■用户也可按本様准的有关示例近似地选 出所需的塔式起重机及其机构的工作级别。但需要说明的是,本标准给出的只是参考示例,并无约 束力。
0.4本标准列出的使用等级.并不是对塔式起重机实际使用工作有效期的保证值口无论是塔式起重机 的使用等级-还是其机构的使用等级,都只是一个设计时的预估值,而决不是制造商给出的该塔式起重 机或其机构有效使用期的保证值,对于某一塔式起重机,如果在设计中未充分注意和估算其预期寿命. 或者制造时未达到正确的设计要求,或者使用中未能按照制造商提供的说明书进行操作和维护•或者实 际使用工况与订购该塔式起重机时提出的要求有较大的差异,则其设计预期寿命就与其实际有效使用 期有比较大的出入;反之,其设计预期寿命与其实际冇效使用期就W能很接近。
学兔兔 www.bzfxw.com
塔式起重机设计规范
1范围
本标准规定了 GB/T 6974.3所定义的塔式起重机设计计算的规则、要求和方法。
本标准适用于:
——可组装与拆卸的塔式起重机;
——永久性安装的塔式起重机;
—电力或内燃机(发动机)驱动的塔式起重机;
——其他型式或用途的塔式起重机〃
本标准不适用于,
——可装设塔身的流动式起重机,
——带或不带臂架的安装桅杆,
——标准发布前制造的塔式起重机,
2规范性引用文件
下列文件对于本文件的应用是必不可少的&凡是注日期的引用文件,仅注日期的版本适用于本文 件,凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件,
GB/T 699优质碳素结构钢
GB/T 700碳素结构钢
GB/T 985」气焊、焊条电弧焊,气体保护焊和高能束焊的推荐坡口
GB/T 985.2 埋孤焊的推荐坡口
GB/T 1231钢结构用高强度大六角头螺栓,大六角螺母、垫圈技术条件
GB/T 1591低合金高强度结构钢
GB/T 1800,2—2009产品几何技术规范(GPS)极限与配合 第2部分;标准公差等级和孔、轴极 限偏差表
GB/T 2423.56—2006 电工电子产品环境试验 第2部分:试验方法 试验Fh:宽带随机振动(数 字控制)和导则
GB 2585铁路用热轧钢轨
GB/T 3077 合金结构钢
GB/T 3098.1紧固件机械性能螺栓、螺钉和螺柱
GB/T 3098.2紧固件机械性能螺母粗牙螺纹
GB/T 3098,4紧固件机械性能螺砰细牙螺纹
GB/T3480渐开线圆柱齿轮承载能力计算方法
GB/T 3480.5直齿轮和斜齿轮承载能力计算 第5部分:材料的强度和质量
GB/T 3632钢结构用扭剪型高强度螺栓连接副
GB/T 3766液压系统通用技术条件
GB/T 3811—2008起重机设计规范
GB 4208 外壳防护等级HP代码)
GB/T 13752—2017
GB/T 4942.1旋转电机整体结构的防护等级(IP代码)分级
GB/T 5117非合金钢及细晶粒钢焊条
GB/T 5118热强钢焊条
GB 5144塔式起重机安全规程
GB 5226.2—2002机械安全 机械电气设备 第32部分:起重机械技术条件
GB/T 5293埋弧焊用碳钢焊丝和焊剂
GB/T 6974J 起重机 术语 第1部分:通用术语
GB/T 6974.3起重机术语第3部分:塔式起重机
GB/T 8110气体保护电弧焊用碳钢、低合金钢焊丝
GB 8918重要用途钢丝绳
GB/T 9439灰铸铁件
GB/T 1005IJ 起重吊钩 第I部分;力学性能、起重量,应力及材料
GB/T 1005L8起重吊钩 第8部分:吊钩横梁毛坯件
GB/T 1005L9起重吊钩第9部分:吊钩横梁
GB/T 10051.10 起重吊钩 第10部分:吊钩螺母
GB/T 1005IJI起重吊钩 第11部分:吊钩螺母防松板
GB/T 10062(所有部分)锥齿轮承载能力计算方法
GB/T I0183J 起重机 车轮及大车和小车轨道公差 第1部分*总则
GB/T 11264热轧轻轨
GB/T 11352 一般工程用铸造碳钢件
GB 14048.4低压开关设备和控制设备 第4-1部分:接触器和电动机起动器 机电式接触器和 电动机起动器(含电动机保护器)
GB/T 14408 —般工程与结构用低合金钢铸件
GB/T 16855.1—2008 机械安全 控制系统有关安全部件 第1部分:设计通则
GB/T 20118 —般用途钢丝绳
起重机
起重机
起重机
GB/T 20303.3
GB/T 23723.3
GB/T 24810.3
GB/T 24817,3
GB/T 24818.3
GB/T 26477.1
司机室第3部分L塔式起重机
安全使用 第3部分:塔式起重机
限制器和指示器 第3部分:塔式起重机
起重机械控制装置布置形式和特性第3部分:塔式起重机
起重机通道及安全防护设施第3部分[塔式起重机
起車机 车轮和相关小车承轨结构的设计计算 第1部分:总则
GB 26557吊笼有垂直导向的人货两用施工升降机
GB/T 27546起重机械滑轮
GB/T 28264起重机械安全监控管理系统
建筑地基基础设计规范 混凝土结构设计规范 钢结构设计规范
起电机用液压缓冲器
GB 50007
GB 50010
GB 50017
JB/T 7017
JB/T8110J 起重机 弹簧缓冲器
JB/T 8110.2起重机 橡胶缓冲器
JB/T 9006
起車机卷筒
起重机用聚氨酯缓冲器
塔式起重机车轮技术条件
JBZT 10833
JB/T 11865
JB/T 11866塔式起重机用限矩型液力偶合器
JG/T 5078J 建筑机械与设备焊接滑轮
JGJ 79建筑地基处理技术规范
JGJ 94建筑桩基技术规范
YB/T 5055 起重机用钢轨
3术语.定义和符号代号
3J 术语和定义
GB/T 6974J和GB/T 6974.3界定的术语和定义适用于本文件。
3.2符号代号
本标准使用的主要符号、代号及其单位、含义等见附录VQ
4 总则
4,1验算
4JJ 通则
计算的目的是从理论上证明】在考虑了用户、设计者和/或制造商之冋约定的使用条件以及安装、拆 卸和运输情况后,塔式起重机的设计符合防止机械危险的安全要求,
如果载荷效应的极值或载荷效应历程超岀了相应的极限状态,就可能发生危险“因此应证明:同时 作用在塔式起重机上的所有载荷,在乘以各自的分项载荷系数后计算出的载荷效应极值,以及估算的载 荷效应历程,在塔式起重机任何关键点上都不超出相应的极限状态口为此,采用极限状态法和许用应力 法来进行验证。
极限状态法(见4.L7.D考虑了载荷的概率特性,而许用应力法(见4.L7.2)则未考虑,所以许用应 力法只在特定情况下可靠.
有些情况要求更髙的安全水平,则可商定和釆用高危险度系数儿(见1.4.2爲
为了反映塔式起重机实际的不利工况和载荷作用的顺序,应对塔式起重机的个别过程或典型使用 (有代表性的载荷历程)的载荷作用进行分析,
先进和公认的理论方法或实验方法'只要符合本标准的原则,原则上都可以采用。
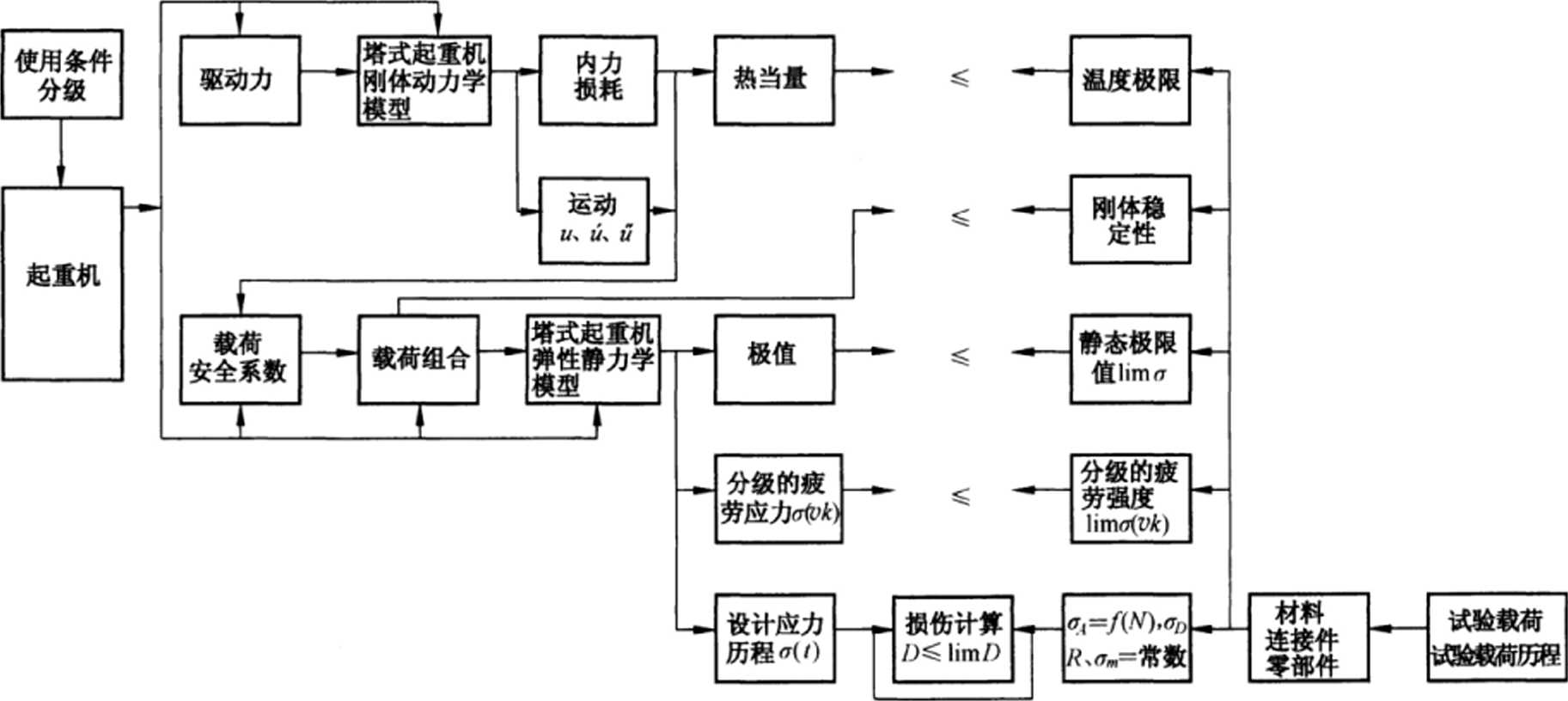
图1为塔式起重机验算的一般流程示意图,
4.L2塔式起重机与载荷的模型
塔式起重机或其部件的运动,内力(齿轮上的力矩,钢丝绳力等)和损耗的分析计算,采用刚体动力 学模型■
在该模型中,马达转矩和/或制动力矩应与任何作用在移动部件的载荷如损耗■质量的重力、塔式起 重机或其部件运动引起的载荷以及风力相平衡。
由这个刚体动力学模型和载荷模型,可得到位移,速度、加速度和/或内力的任何变化以及相应的加 速度和/或内力的瞬时值,
如果计算符合约定的使用条件•则这些变化是估算载荷效应历程(如热当俄)和应力历程的基础。 由于采用剛体动力学模型算岀的加速度和内力的变化和瞬时值•只代表了实际过程的平均值,为估算其 突然变化而引起的载荷实际值.这些平均值应乘以动力系数见4.3)来放大,
在某些塔式起重机或其配置中.不同驱动机构同时动作产生的所有载荷互不影响,对此驱动机构的 载荷作用可独立考虑。在有些情况下,不同驱动机构同时动作产生的载荷互相影响,对此应考虑其 影响。
塔式起重机或其部件的任一机械零件和/或构件上的名义应力(也称为标称应力),通常可采用适当 的弹性静力学模型来计算,该模型由梁或更复杂的单元构成,如平面应力单元、板或壳单元。
名义应力是按材料的纯弹性强度理论算出的应力,不包括局部的应力集中效应。
4.1.3载荷作用的模拟
为模拟塔式起重机或其部件上的载荷作用随时间变化的过程,应将在塔式起重机预定使用中出现 的不相关过程所引起的等效静载荷施加到弹性静力学模型上,该等效静载荷应与该起重机或其部件的 配置和支撑条件相符合。
注:在本标准中,术语“载荷”或“载荷作用",是指在塔式起重机或其部件上引起载荷效应的任何行为或情况,如作 用力、预定位移和意外位移和/或运动、温度、风压。
4.3中给出了等效静载荷。这些等效静载荷代表了塔式起重机使用中的载荷作用。
4.1.4载荷组合和载荷效应
载荷叠加的方式应使其所产生的载荷效应对所考虑的使用情况达到瞬时极值,这样的载荷叠加称 为载荷组合。基本的载荷组合见4.4。
在确定载荷组合时,应考虑塔式起重机的用途,还应考虑其控制系统、对使用的规范性说明和任何 其他的内在条件,这都与能力验证的具体目的有关。
对某一载荷组合而言,同时作用的所有载荷其大小、位置和方向的选择,应使极值载荷效应出现在 所考虑的零部件或设计点中。因此,为确定所有设计关键点的极值应力,在同一载荷组合中,应考虑多 个加载过程或塔式起重机的多个配置,例如起重小车的不同位置。
在进行静力验算时.应使用内力或名义应力来表示载荷效应的上、下极端值。与塔式起重机或其部 件的既定使用条件和运动学特性相结合,这些极值就限定了验证疲劳强度的内力或名义应力的历程。
验证疲劳强度时,应明确重要应力循环的次数和大小。
4.1.5极限状态
本标准的极限状态,是指如果超出就可能导致塔式起重机工作特性失效的整机、其零部件或材料的 状态。承载能力极限状态和正常使用极限状态之间是有区别的,具体为:
a) 达到承载能力极限状态的表现有:
D名义应力作用引起塑性变形或摩擦连接件的滑动;
2) 零部件或连接件的失效(如静强度失效、疲劳失效或形成危险裂缝);
3) 塔式起重机或其部件的弹性失稳(如构件屈曲、薄板屈曲);
4) 塔式起重机或其部件的刚体失稳(如倾覆、移位);
b) 达到正常使用极限状态的表现有:
D 出现损害塔式起重机预定使用的变形(如损害运动零部件功能、部件间隙的变形);
2) 出现损害塔式起重机司机或结构或妨碍操作性能的振动;
3) 超出温度极限(如马达、制动器过热)。
d)
b)
a)
说明:
a)
B)
塔式起重机与载荷的模型;
载荷作用;
C)
d)
极限状态; 验证。
图1塔式起重机验算的一般流程
4.1.6能力验证
与材料选择、制造技术和规定的使用条件三者相适应的极限状态,应在能力验证中说明。
为确认未超岀承载能力极限状态,应进行下列验证:
a) 构件、连接件和零部件的强度验证:
1) 在静载荷和等效静载荷作用下;
2) 在循环载荷(疲劳)作用下;
b) 塔式起重机及其部件的弹性稳定性验证;
C)刚体稳定性验证。
为确认未超出正常使用极限状态,应考虑下列因素并在必要时对其验证:
a) 变形验证;
b) 振动;
C)热性能。
4.1.7能力验证方法
4.1.7.1极限状态法
极限状态法适用于所有塔式起重机及其所有部分且不受任何限制。
注:极限状态法的全面介绍见ISO 2394,也可参见GB 50068β
应算出单个特征载荷儿.必要时用动力系数们放大,再乘以相应的分项载荷系数厶或折算分项载
荷系数厶,并按所考虑的载荷组合,将其组合到FJO
已确定之后,也应乘以适当的髙危险度系数XMe y,,F∕的乘积用来确定所产生的载荷效应即结
构件或机械零件中的内力,或是连接件和支撑结构中的作用力。
为证实不会发生静强度失效和弹性失稳,应计算载荷效应作用在特定构件或零部件上所产生的名 义设计应力J,,并与局部效应引起的任何应力进行合成9項也是利用相应的分项载荷系数心和商 定的髙危险度系数儿计算出来的。
合成的设计应力巳应与极限设计应力limσ比较。极限设计应力limσ用材料、连接件或零部件的 特定强度或特征抗力R除以抗力系数/. = 1.10算出,其可靠概率(可靠度)不低于95%。
验算刚体稳定性时,应该证明,在乘以各自分项载荷系数的载荷的联合作用下,刚体不会产生运动。 所有超出特定限度的支撑,如处于拉伸状态的车轮/轨道或处于受压状态的钢丝绳,应忽略不计。这意 味着,在弹性静力学模型中,相应的限制性支撑应设为“无作用的”。其余确实的和/或摩擦性的支撑力 应足以确保刚体稳定性。
图2为极限状态法的典型流程图。基于力、力矩、挠度验算的极限状态法应通过对前述的类推来 应用。

说明:
fi——作用在构件或零部件上的特征载荷M
F7 一一载荷组合丿用动力系数代放大后得出的组合载荷;
SA ——由组合载荷F,引起的构件或支撑部件的A截面上的载荷效应.例如内力和力矩;
4’・一-由载荷效应S引起的特定构件,上的应力;
% 一-由局部效应引起的特定构件,上的应力;
S ——特定构件/上的合成设计应力;
R ―材料、特定构件或特定连接件的特定强度或特征抗力,如相应于屈服点、弾性稳定极限或疲劳强度的应力 (极限状态X
Iimb 极限设计应力;
厶一一按所考虑的载荷组合.适用于単个载荷的分项载荷系数;
yn 一一高危险度系数,必要时釆用;
厶一抗力系数。
图2极限状态法的典型流程图
4.1.7.2 许用应力法
对于质址分布类别为MIX'1(见4.4.3)这种载荷作用与载荷效应呈线性关系的起重机,可采用许用 应力法进行能力验算。对于MDC2(见4.4.3)系统中载荷作用与载荷效应呈线性关系的那些部分,也可 使用许用应力法。
许用应力法是极限状态法的一个特例,其分项载荷系数取相同的值,与抗力系数相结合,形成总安 全系数//•
应算出单个特性载荷无,必要时用动力系数饥放大,并按所考虑的载荷组合将其进行组合。组合 载荷已用来确定所产生的载荷效应S*,即结构件或机械零件中的内力,或是连接件和支撑结构中的作 用力。
为证实不会发生静强度失效和弹性失稳,应计算载荷效应作用在特定构件或零部件上所产生的名 义应力儿‘,并与局部效应引起的任何应力。〃进行合成。合成应力七应与许用应力admσ比较。许用 应力admσ用材料、连接件或零部件的特定强度或特征抗力R除以总安全系数心,必要时再除以高危 6
险度系数儿算出,其可靠概率(可靠度)不低于95%。
图3为许用应力法的典型流程图。


说明:
f. ——作用在构件或零部件上的特征载荷/;
Fl ——载荷祖合丿用动力系数代放大后得出的组合载荷;
S, — 由组合载荷F,引起的构件或支撑部件的&截而上的载荷效应.例如内力和力矩;
σ1, —由载荷效应&引起的特定构件/上的应力;
σ., ——由局部效应引起的特定构件/上的应力;
5 -一特定构件/上的合成应力;
R 一 材料、特定构件或特定连接件的特定强度或特征抗力.例如相应于屈服点、弹性稳定极限或疲劳强度的应 力(极限状态);
admσ--许用应力;
y,——按所考虑的载荷组合.适用于特定强度的总安全系数;
厶 ——高危险度系数,必要时釆用。
图3许用应力法的典型流程图
4.2分级
4.2.1通则
分级用来确定单独设计和制造的塔式起重机和/或其零部件的使用条件,也用于说明为批堡生产而 设计的塔式起重机和/或其零部件的使用条件,以便按其预定使用来进行选择。分级包括:
——整机分级;
―机构分级;
结构件或机械零件分级。
4.2.2〜4.2.4仅给出了塔式起重机及其零部件常用的使用等级和工作级别,除此之外的其他使用等 级和工作级别见GB/T 3811-2008的第3章。
4.2.2整机分级
4.2.2.1整机的使用等级
塔式起重机的设计预期寿命,是指设计预设的该塔式起重机从开始使用到最终报废时能完成的总 工作循环数。一个工作循环是指塔式起重机从准备起升有效载荷开始,到准备起升下一个有效载荷为 止的一个连续的运动。
塔式起重机的使用等级根据其可能完成的总工作循环数分Ul〜U5共5个等级,见表Io
表1塔式起重机的使用等级
|
使用等级 |
总工作循环数Cr |
使用频繁程度 |
|
Ul |
1.60×104<Cτ≤3.20×104 |
很少使用 |
|
U2 |
3.20X10'VCrW6.30X10」 | |
|
U3 |
6.30×104<Cr≤1.25×105 | |
|
U4 |
1.25×103<Cτ≤2.50×10s |
不频繁使用 |
|
U5 |
2.50×105<Cr≤5.00×105 |
中等频繁使用 |
4.2.2.2整机的载荷状态
塔式起重机的载荷状态,是指在其设计预期寿命期限内,其各个不同的净载荷(净起重拭的重力)及 相应的工作循环数,与最大净载荷(额定起重量的重力)及总工作循环数的比值情况,用载荷谱系数KP 来表征,分为QI〜Q4共4个等级,见表20塔式起重机的载荷状态通常在Ql〜Q3之间。
载荷谱系数K,,用来描述塔式起重机在工作期间搬运的不同净载荷,也用来描述起升机构在工作 期间的载荷变化情况。
表2塔式起重机的载荷状态及载荷谱系数
|
载荷状态 |
载荷谱系数KP |
说明 |
|
Ql |
Kp≤O.125 |
很少吊运额定载荷,经常吊运较轻载荷 |
|
Q2 |
0.125<Kp≤0.250 |
较少吊运额定载荷,经常吊运中等载荷 |
|
Q3 |
O.25O<Kp≤O.5OO |
有时吊运额定载荷,经常吊运较更载荷 |
|
Q4 |
0.500VKPWI .000 |
经常吊运额定载荷 |
如果已知塔式起重机各个起升载荷及相应的工作循环数资料,则其载荷谱系数KP可用式(1) 计算。
KLN[目(/)[ ........................(1)
LUT Xr QmaX f J
式中:
KP——塔式起重机的载荷谱系数;
Ci ——大小为PQ的净载荷的工作循环数;
CT —塔式起重机的总工作循环数,Cτ= C1+C2+C3 + ∙∙∙÷CHj
PQ ——塔式起重机在预期寿命期限内起升的各个不同的净载荷的大小,PQI= Pq∣,Pq2,Pq∙3, ・・・,Pq,,单位为牛顿(N);
PQmaX—-塔式起重机的最大净载荷(额定起重蛍的重力),单位为牛顿(N)。
展开后,式(1)变为式(2):

式中符号同式(1)。
如果不能获得塔式起重机的各个起升载荷及相应的工作循环数资料,则可由制造商与用户协商选 出合适的载荷谱系数和载荷状态。
4.2.2.3 整机的工作级别
根据塔式起重机的使用等级和载荷状态,塔式起重机可分为AI〜A7共7个工作级别,见表3。塔 式起重机的工作级别通常在Al〜A6之间。
表3塔式起重机的工作级别
|
载荷状态 |
载荷谱系数KP |
使用等级 | ||||
|
UI |
U2 |
U3 |
U4 |
U5 | ||
|
QI |
Kp≤O.125 |
AI |
AI |
A2 |
A3 |
Λ4 |
|
Q2 |
0.125VKPMO .250 |
AI |
A2 |
A3 |
A4 |
A5 |
|
Q3 |
0.250VKP<0.500 |
A2 |
A3 |
A4 |
A5 |
A6 |
|
Q4 |
0.500<Kp≤1.000 |
A3 |
A4 |
Λ5 |
A6 |
A7 |
4.2.2.4分类及其整机分级
根据要完成的工作,塔式起重机可分为三种基本类型,见表4。
表4塔式起重机类型
|
类型 |
说 |
明 . |
|
1 |
不经常使用或具有轻级载荷状态的塔式起重机 | |
|
2 |
建设施工用塔式起重机 | |
|
3 |
经常使用或具有重级载荷状态的塔式起重机 | |
各类塔式起重机的整机分级见表5,整机分级举例见表6o
表5各类塔式起重机的整机分级
|
类型 |
整机分级 | ||
|
使用等级 |
载荷状态 |
工作级别 | |
|
1 |
Ul 〜U4 |
Q1、Q2 |
AI 〜A4 |
|
2 |
U3、U4 |
Q2 |
A3、A4 |
|
3 |
U4、U5 |
Q2、Q3 |
A4〜A6 |
表6各类塔式起重机的整机分级举例
|
类型 |
用途 |
整机分级 | ||
|
使用等级 |
载荷状态 |
工作级别 | ||
|
1 |
不经常使用的塔式起重机 |
Ul |
Q2 |
Al |
|
货场用塔式起重机 |
U3 |
Ql |
A2 | |
|
钻井平台维修用塔式起重机 |
U3 |
Q2 |
A3 | |
|
船舶修理厂用塔式起重打~~ |
U4 |
_______Q2_______ |
A4 | |
表6 (续)
|
类型 |
用途 |
整机分级 | ||
|
使用等级 |
载荷状态 |
工作级别 | ||
|
2 |
建设施工用自行架设式塔式起重:机 |
U3 |
Q2 |
A3 |
|
建设施「•用组装式塔式起重机 |
U4 |
Q2 |
A4 | |
|
3 |
造船厂舸装用塔式起重机 |
U4 |
Q2 |
A4 |
|
港口集装箱装卸用塔式起重机 |
U4 |
Q2 |
A4 | |
|
造船用塔式起重机 |
U4 |
Q3 |
A5 | |
|
抓斗塔式起重机 |
U5 |
Q3 |
Λ6 | |
4.2.3机构分级
4.2.3.1机构的使用等级
机构的设计预期寿命,是指设计预设的该机构从开始使用到预期更换或最终报废时的总运转时间, 不包括工作中该机构的停歇时间。塔式起重机机构的使用等级根据其可能的总运转时间分成Tl〜T5 共5个等级,见表7。
表7塔式起重机机构的使用等级
|
使用等级 |
总运转时间Ir h |
运转频繁程度 |
|
Tl |
2OO<∕r≤4OO |
很少使用 |
|
T2 |
4OO<∕t≤8OO | |
|
T3 |
800<∕ r≤l 600 | |
|
T4 |
1 600<∕τ≤3 200 |
不频繁使用 |
|
T5 |
3 200<∕r≤6 300 |
中等頻繁使用 |
4.2.3.2机构的载荷状态
机构的载荷状态表明机构受载的轻重程度,用载荷谱系数K,“表征,分为Ll〜1,4共4个等级,见 表8。塔式起重机机构的载荷状态通常在Ll-L3之间。
如果已知机构的各个载荷及相应的持续时间,则其载荷谱系数KWt可用式(3)计算。
KBq 侣(?)[ ........................(3)
式中:
Ktn——机构的载荷谱系数;
I. ―机构承受的大小为巳的载荷的持续时间,单位为小时(h);
tτ —一所有不同载荷作用的总持续时间,S=厶+如+上+…+上,单位为小时(h);
PI ——机构在工作期限内承受的各个不同载荷的大小,P,= P1,P2,P3,-,Pm,单位为牛顿
(N);
PgX —机构承受的最大载荷,即P】,P2,P3,・・・,P”中的最大值,单位为牛顿(N)。 展开后,式(3)变为式(4):
k-γ(A)3÷γ(A)3÷γ(A)3÷∙→γ(^)3 -
t T V-ImaX , Z r ' 尸 gχ∕ t T V InaX ∙ I T '尸 max,
式中符号同式(3)。
表8塔式起重机机构的载荷状态及载荷谱系数
|
载荷状态 |
载荷谱系数K(B |
说 明 |
|
Ll |
KEWo.125 |
机构很少承受最大载荷,一般承受较轻载荷 |
|
L2 |
0.125<Kw≤0.250 |
机构较少承受最大载荷,一般承受中等载荷 |
|
L3 |
0.25OVKEMo.500 |
机构有时承受最大载荷,一般承受较大载荷 |
|
L4 |
0.500VKW(WLOOO |
机构经常承受最大载荷 |
4.2.3.3机构的工作级别
机构按其使用等级和载荷状态分为Ml〜M7共7个工作级别,见表9。塔式起重机机构的工作级 别通常在Ml〜M6之间。
机构的工作级别表示各个机构分别作为一个整体的受载和运转频繁程度情况,而并不表示机构的 所有零部件都与整体相同。
表9塔式起重机机构的工作级别
|
载荷状态 |
载荷谱系数Knl |
使用等级 | ||||
|
TI |
T2 |
T3 |
T4 |
T5 | ||
|
LI |
Kw≤0.125 |
MI |
MI |
M2 |
M3 |
M4 |
|
L2 |
0.125VKntMo.250 |
MI |
M2 |
M3 |
M4 |
M5 |
|
L3 |
0.250VKnfwO.500 |
M2 |
M3 |
M4 |
M5 |
M6 |
|
L4 |
0.50OVKEWl.000 |
M3 |
M4 |
M5 |
M6 |
M7 |
4.2.3.4各类塔式起重机的各个机构分级
各类塔式起重机的各个机构分级见表10,机构分级举例见表Il0
表10各类塔式起重机的各个机构分级
|
类型 |
__ 机构分级 ________ | ||||||||||||||
|
使用等级 |
载荷状态 |
工作级别 ____ | |||||||||||||
|
H |
S |
L |
D |
T |
H |
S |
L |
D |
T |
H |
S |
L |
D |
T | |
|
1 |
Tl〜 T4 |
Tl〜 T4 |
TI〜 T3 |
Tl〜 T3 |
Tl. T2 |
Ti- L2 |
L3 |
Ll J>2 |
L1、L2 |
L3 |
Ml〜 M4 |
M2〜 M5 |
Ml〜 M3 |
Ml〜 M3 |
M2、 M3 |
|
2 |
T3、 T4 |
亍3、 T4 |
T2、 T3 |
T2、 T3 |
T1、 T2 |
L2 |
L3 |
L3 |
L2 |
L3 |
M3、 M4 |
M4、 M5 |
M3、 M4 |
M2、 M3 |
M2、 M3 |
|
3 |
T4、 T5 |
T4、 T5 |
T3「 T4 |
T3〜 T5 |
T2〜 T5 |
L2、 L3 |
L2、L3 |
L2、L3 |
L2.L3 |
L2、L3 |
M4〜 M6 |
M4〜 M6 |
M3〜 M5 |
M3〜 M6 |
M2〜 M6 |
注:H—起升;S——回转;L——动臂变幅;D—小车变幅;T——行走。
表11各类塔式起重机的各个机构分级举例
|
类型 |
用途 |
机构分级 | ||||||||||||||
|
使用等级 |
载荷状态 |
工作级别 | ||||||||||||||
|
H |
S |
L |
D |
T |
H |
S |
L |
D |
T |
H |
S |
L |
D |
T | ||
|
1 |
不经常使用的塔式起重机 |
Tl |
Tl |
Tl |
TI |
Tl |
L2 |
L3 |
L2 |
L2 |
L3 |
MI |
M2 |
Ml |
MI |
M2 |
|
货场用塔式起重机 |
T3 |
T3 |
T2 |
T2 |
TI |
Ll |
L3 |
Ll |
Ll |
L3 |
M2 |
M4 |
Ml |
Ml |
M2 | |
|
钻井平台维修用塔式起重机 |
T3 |
T3 |
T2 |
T2 |
TI |
LI |
L3 |
L2 |
L2 |
L3 |
M3 |
M4 |
M2 |
M2 |
M2 | |
|
船舶修理厂用塔式起重机 |
T4 |
T4 |
T3 |
T3 |
T2 |
L2 |
L3 |
L2 |
L2 |
L3 |
M4 |
M5 |
M3 |
M3 |
M3 | |
|
2 |
建设施T用自行架设式塔式起 重机 |
T3 |
T3 |
T2 |
T2 |
TI |
L2 |
L3 |
L3 |
L2 |
L3 |
M3 |
M4 |
M3 |
M2 |
M2 |
|
建设施工用组装式塔式起重机 |
T4 |
T4 |
T3 |
T3 |
T2 |
L2 |
L3 |
L3 |
L2 |
L3 |
M4 |
M5 |
M4 |
M3 |
M3 | |
|
3 |
造船厂物装用塔式起重机 |
T4 |
T4 |
T3 |
T3 |
T5 |
L2 |
L3 |
L2 |
L2 |
L3 |
M4 |
M5 |
M3 |
M3 |
M6 |
|
港口集装箱装卸用塔式起重机 |
T4 |
T4 |
T3 |
T4 |
T2 |
L2 |
L2 |
L2 |
L2 |
L2 |
M4 |
M4 |
M3 |
M4 |
M2 | |
|
造船用塔式起重机 |
T4 |
T4 |
T3 |
T3 |
T4 |
L3 |
L3 |
L3 |
L3 |
L3 |
M5 |
M5 |
M4 |
M4 |
M5 | |
|
抓斗塔式起重机 |
T5 |
T5 |
T4 |
T5 |
T2 |
L3 |
L3 |
L3 |
L3 |
L3 |
M6 |
M6 |
M5 |
M6 |
M3 | |
注:H 一起升;S——回转;L——动臂变幅;D—小车变幅;T—行走。
4.2.4结构件或机械零件分级
4.2.4.1结构件或机械零件的使用等级
结构件或机械零件的总使用时间,是指设计预设的该结构件报废或该机械零件更换为止的期间内 发生的总应力循环数。结构件或机械零件的一个应力循环是指应力从通过?”时起至该应力同方向再 次通过久”时为止的一个连续过程,其中4为在总使用时间内所有峰值应力与谷值应力的算术平均值。 图4为随时间变化的5个应力循环举例。
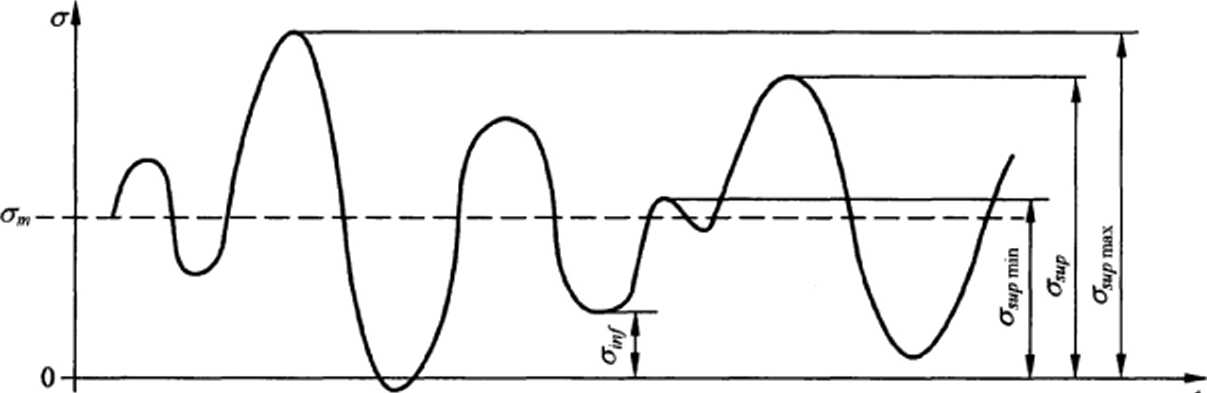
说明:
b, “ --峰值应力; 。樹 --谷值应力;
σ,M∕. mu* ---最大峰值应力; b S rnιn ---最小峰值应力;
J ——总使用时间内所有峰值应力和谷值应力的算术平均值。
图4随时间变化的5个应力循环举例
结构件的总应力循环数与塔式起重机的总工作循环数之间有一定的比例关系,某些结构件在塔式 起重机一个工作循环内可能经受儿次应力循环,这取决于塔式起重机的类型和结构件在塔式起重机结
构中的位置,不同的结构件可能各不相同。如果已知这一比例关系,结构件的总应力循环数便可由塔式 起重机使用等级的总工作循环数导出。
机械零件的总应力循环数应由其归属的机构或设计预定的总使用时间导出,推导时应考虑影响其 应力循环的转速和其他相关情况。
塔式起重机结构件或机械零件的使用等级根据其可能的总应力循环数分为Bl〜B8共8个等级, 见表12。
表12塔式起重机结构件或机械零件的使用等级
|
使用等级 |
结构件或机械零件的总应力循环数HT |
|
Bl |
l.60×l01<nr≤3.20×l01 |
|
B2 |
3.20×10,<nτ≤6.30×10, |
|
B3 |
6.3O×1O,<mγ≤1.25×1O5 |
|
B4 |
1.25×10s<nτ≤2.50×10δ |
|
B5 |
2.5O×1O5<mγ≤5.0O× IO5 |
|
B6 |
5.00×10s<wr≤1.00×106 |
|
B7 |
1.00× 106<wr≤2.00× IO6 |
|
B8 |
2.00 X 106<wτ≤4.00×106 |
4.2.4.2结构件或机械零件的应力状态
结构件或机械零件的应力状态表明其在总使用期内发生各个应力的大小及其相应的应力循环情 况,用应力谱系数K,来表征,分为SI-S4共4个等级,见表13β每个结构件或机械零件的应力谱系数 Ks可用式(5)计算。
式中:
KS——结构件或机械零件的应力谱系数;
S——结构件或机械零件中大小为J的应力的循环数;
WT --结构件或机械零件的总应力循环数,〃r= 〃1+〃2+〃3 -----
”——结构件或机械零件中在工作期限内发生的各个不同应力的大小,5 =S ,b2,S, ・・・,/,;在 釆用应力幅法进行防疲劳失效验算时,。,为应力半幅值;在采用应力比法进行防疲劳失效 验算时9,为应力峰值(见图4);对于机械零件,认为每个〃,循环期间内发生的应力巳其幅 值与峰值是一致的,因为其平均应力定为零;
<ymaχ---为4,。2,。3,・・・5“中的最大者;
C —辭指数,与相关材料的性能、结构件或机械零件的类别、形状和尺寸以及表面粗糙度与腐 蚀程度等有关,由实验得出,见GB/T 3811-2008的式(107)和式(108)o
展开后,式(5)变为式(6):

表13结构件或机械零件的应力状态及应力谱系数
|
应力状态 |
_____________________应力谱系数KS_____________________ |
|
Sl |
KsWo.125 |
|
S2 |
0.125VKSWO .250 |
|
S3 |
0.250VKsvo.500 |
|
S4 |
0.500VKSWI.000 |
|
注:某些结构件或机械零件.如受弾簧加载的零部件.其所受载荷与塔式起重机或其结构/机构所承受的工作载 _____荷基本无关.大多数情况下,数Ks = L应力状态为S4。_____________________________ | |
4.2.4.3结构件或机械零件的工作级别
结构件或机械零件按其使用等级和应力状态分为El〜E8共8个工作级别,见表14。
表14塔式起重机结构件或机械零件的工作级别
|
应力状态 |
应力谱系数KS |
使用等级 | |||||||
|
Bl |
B2 |
B3 |
B4 |
B5 |
B6 |
B7 |
138 | ||
|
Sl |
KsWO.125 |
El |
EI |
EI |
E2 |
E3 |
E4 |
E5 |
E6 |
|
S2 |
0.125<Ks≤0.250 |
EI |
EI |
E2 |
E3 |
E4 |
E5 |
E6 |
E7 |
|
S3 |
O.25O<Ks≤O.5OO |
El |
E2 |
E3 |
E4 |
E5 |
E6 |
E7 |
E8 |
|
S4 |
0.500< Ks ≤ 1.000 |
E2 |
E3 |
E4 |
E5 |
E6 |
E7 |
E8 |
E8 |
4.3载荷
4.3.1通则
4.3.1.1 概述
作用在塔式起重机上的载荷分为常规载荷(见4.3.1.2).偶然载荷(见4.3.1.3)、特殊载荷 (见4.3.l.4)β此外还有作用在局部部位的通道载荷(见4.3.5)o
在防刚体失稳、静强度失效、弹性失稳以及必要的抗疲劳失效验算中,应考虑上述载荷。
此外,应考虑由于用户的特别要求而产生的载荷,如坡道载荷(位于倾斜支承结构或轨道上的塔式 起重机自重载荷及其起升载荷沿倾斜面的分力),当规定轨道或基础的坡度不超过O∙5%时,则可不考虑 坡道载荷;当用户提岀坡度要求或未按前述要求作出规定时,则应考虑相应坡度引起的载荷并将其归入 常规载荷。
如某载荷不可能出现,则应略去不计,如在室内工作的不考虑风载荷。同样,在塔式起重机使用说 明书中禁止岀现的载荷,也应略去。
4.3.1.2常规载荷
常规载荷包括:
a) 作用在塔式起重机质量上的起升效应和重力效应;
b) 垂直作用在起升载荷上的惯性效应和重力效应;
C)在不平轨道上运行引起的载荷;
(1)塔式起重机所有驱动机构加速引起的载荷;
e)位移引起的载荷。
注:常规载荷经常出现在正常作业中。
4.3.1.3偶然载荷
偶然载荷包括:
a) 工作状态风载荷;
b) 冰雪载荷;
C)温度变化引起的载荷;
d)偏斜运行引起的载荷。
注:偶然载荷不经常出现•在疲劳估算中通常忽略不计。
4.3.1.4特殊载荷
特殊载荷包括:
a) 以最大起升速度提升地面载荷而引起的载荷;
b) 非工.作状态风载荷;
C)试验载荷;
d) 缓冲力产生的载荷;
e) 意外停机引起的载荷;
D机构或零部件失效引起的载荷;
g) 塔式起重机基础受到外部激励引起的载荷;
h) 安装、拆卸和运输引起的载荷。
注:特殊载荷也不经常出现.在疲劳估算中通常也忽略不计。
4.3.2常规载荷
4.3.2.1作用在塔式起重机质■上的起升效应和重力效应
当塔式起重机从地面升起载荷时,或者突然卸除悬吊在空中的全部载荷或部分载荷时,应考虑其结 构的振动效应,此时塔式起重机或其部件质量的重力应乘以动力系数们。们按下列规定取值:
——对于质量分布类别为MDC1(见4.4.3)的塔式起重机部件:们=l+α,O<α ≤0.1;
——对于质量分布类别为MDC2(见4.4.3)的塔式起重机部件:们=1±。,O≤α ≤0.05o采用1 + 。还是1一仪,取决于重力的作用在验算所选的校核点(关键点)上是增加了还是减小了载荷 效应。
塔式起重机的质量包括工作时始终设置在其上的零部件的质量;对于某些塔式起重机或其应用,可 能还需考虑外来聚集物(如粘结在其上的灰浆或其他粉末)增加的质量。但不包括4.3.2.2.1中规定的 起升载荷质量。
4.3.2.2垂直作用在起升载荷上的惯性效应和重力效应
4.3.2.2.1起升无约束的地面载荷
在起升无约束的地面载荷时,应考虑由此引起的动力效应,此时起升载荷质量的重力应乘以动力系 数相(见图5)0
注1:此动力效应,发生在起升载荷离地瞬间,駆动机构加速之际。
起升载荷质址包括有效起升载荷质量(有效起重址)、吊具和部分悬垂的起升钢丝绳等的质量。
注2:部分悬垂的起升钢丝绳质虽,建议取为按起升高度计算的起升钢丝绳质址的50%.
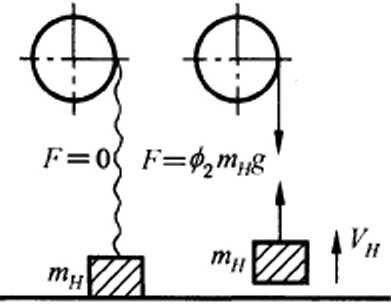

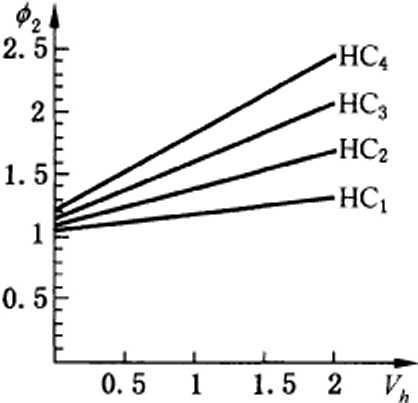
图5动力系数。2
动力系数02按式(7)计算。
妁=2Inm +PiVh ........................( 7 )
式中:
≠2 —起升动力系数;
≠2m1n——与起升状态级别相对应的起升动力系数的最小值,见表15;
β2 —按起升状态级别设定的系数,见表15;
VA —稳定起升速度,单位为米每秒(m∕s),与起升驱动型式及其操作方法有关,见表lβ0
根据塔式起重机的动力特性和弹性特性,将其起升状态划分为HCI-HCl四个级别:结构刚度小 且驱动系统有平稳的动力特性的为HG级,结构刚度大且驱动系统有速度突变的动力特性的为HCI 级,介于两者之间的为HC?级和HG级。起升状态级别可以根据经验或塔式起重机的各具体类型确 定。塔式起重机的起升状态级别举例参见附录A。
桓的值也可通过试验或分析来确定,此时不需考虑起升状态级别。
表15 %和。2值
|
起升状态级別 |
____________巴____________ |
PZmin |
|
HCl |
0.17 |
1.05 • |
|
HC2 |
0.34 |
1.10 |
|
HCi |
0.51 |
1.15 |
|
HCI |
0.68 |
1.20 |
表16计算巾2用的稳定起升速度冰值
|
载荷组合 (见4.4.5和表24) |
起升驱动型式及其操作方法 | ||||
|
HDI |
HD2 |
HD3 |
HD4 |
HD5 | |
|
Al 和 Bl |
UA πuιx |
Pg |
SCS |
θ,ɔ V/I ∏u∣x |
0 |
|
CI |
— |
Ph mnx |
. .. |
Ph nmx |
0.5Vλ max |
|
注:HDl ——微速不可用,或者无微速也能开始起升3 HD2——只有在微速时才能开始起升; HD3——在载荷起升高地前,起升机构的控制一直保持稳定微速; HD4——开始起升是通过无级变速完成的; HD5 ——起升机构的控制是自动的.并能保证变速带来的动态力可忽略不计; VA m∙.—最大稳定起升速度; _____U心——稳定起升微速。___________________________________________ | |||||
4.3.2.2.2突然卸除部分起升载荷
对于以在空中突然卸除部分起升载荷为正常工作的塔式起重机,如使用抓斗或电磁盘在空中卸载 的塔式起重机,作用在其上的最大动力效应,可用起升载荷乘以动力系数内(见图6)来考虑。

m∕~AmHrTI
/'=5"g
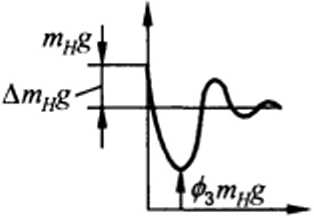
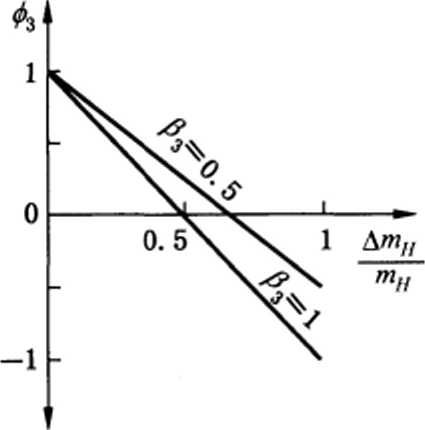
图6动力系数。3
动力系数妇按式(8)计算:
∆7Z2 H , c、
<h=l--(1+凡) ........................(8 )
式中:
L —突然卸载动力系数;
Sh —在空中突然卸除的部分起升载荷质量(通常为有效起重量),单位为千克(kg); --起升载荷质量,单位为千克(kg);
Λ ——系数,对抓斗或类似的慢速卸载装置=0.5;对电磁盘或类似的快速卸载装置,凡= 1.0o
4.3.2.3在不平轨道上运行引起的载荷
塔式起重机带载或空载运行在不平轨道上引起的垂直动力效应,应采用适当的塔式起重机或小车 与运行轨道的模型,通过试验或计算进行估算和确定。
在计算其运行的动力效应时,应考虑其垂直加速效应,此时塔式起重机和起升载荷质量的重力应乘 以动力系数们。
对于符合GB/T 10183.1的塔式起重机轮轨系统,当运行速度不大于1.0 m/s时,可取≠1 = 1.1;当 运行速度在1.0 m/s〜1.5 m/s之间时,可取们=1.2。对于小车轮轨系统,如果运行轨道的接头经过处 理消除了阶差,则可取们=1.0。
注:们值也可按GB/T 22437.1—2008的附录D或EN 13OO1-2j2OO4÷A3:2009的4.2.2.3给出的单质量-弹簧模型 估算。
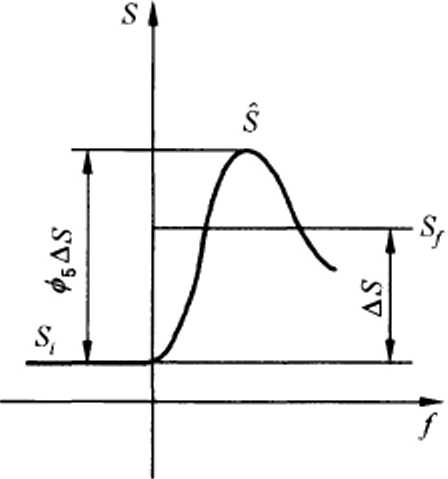
4.3.2.4驱动机构加速引起的载荷
驱动力产生的加速或减速在塔式起重机中引起的载荷,可用刚体动力学模型来计算。为此需要将 总起升载荷视为固定在起重臂的端部或直接固定在小车的下方。
驱动力引起的载荷效应S作用在承受驱动力的部件上,也作用在塔式起重机和总起升载荷(总起
重虽的重力)上。由于刚体动力分析不能直接反映弹性效应,所以载荷效应S应使用动力系数族5来计
算(见图7),如式(9)所示。
S=S, ÷≠3∆S ........................( 9 )
式中:
S ——驱动力引起的载荷效应;
△S —由驱动力变化量厶F(∆F = Fi - F/)引起的载荷效应变化量,△,= SZ- S15
S.Sf——由F,和Fr引起的初始(D载荷效应和最终(/)载荷效应;
F,、F.—初始(D驱动力和最终(/)驱动力;
05 —驱动机构加减速动力系数。
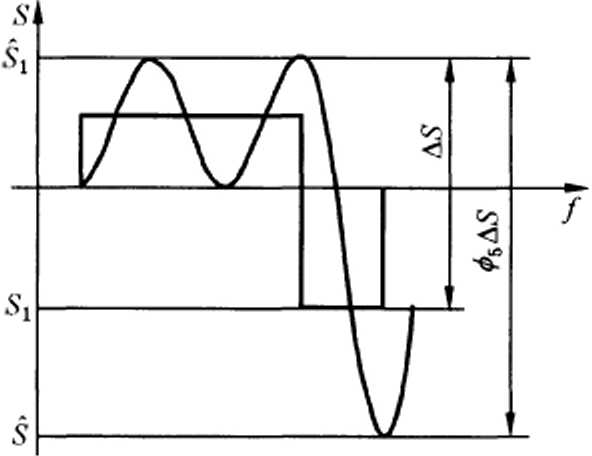
a)驱动力从稳定状态开始变化
b)就位时的状况
图7动力系数。5
船值按表17选取。
表17 饥的取值范围
|
序号 |
h |
适用情况 |
|
1 |
1.0 |
离心力 |
|
2 |
1≤≠5≤1.5 |
驱动机构没有反向冲击或者有不影响动态力的反向冲击,且驱动力变化平稳 |
|
3 |
1.5≤≠s≤2 |
驱动机构没有反向冲击或者有不影响动态力的反向冲击,但驱动力变化突然 |
|
4 |
3.0 |
驱动机构的反向冲击很大,又没有用“弹簧-质址模型"进行更精确的估算 |
如果一个可传递的动态力被摩擦力或驱动机构的特性所限定,则应采用该限定力和适合该系统的 系数代,例如在轨道上运行的塔式起重机,其在水平面内起动和制动所引起的惯性力,就不应大于主动 车轮与轨道之间的黏着力。
塔式起重机或起重小车在水平面内起动或制动时,其加、减速度值可以根据加、减速时间和所要达 到的速度值来推算得到。如果未知,则可参考表18中所列的三种运行工作状况来选择与所要达到的速 度相应的加速时间和加速度值。
表18加速时间和加速度值
|
要达到的速度 m/s |
低速和中速长距离运行 |
正常使用中速和高速运行 |
高加速度、高速运行 | |||
|
加速时间 S |
加速度 m∕s2 |
加速时间 S |
加速度 m∕s2 |
加速时间 S |
加速度 mzzs2 | |
|
4.00 |
— |
— |
8.00 |
0.50 |
6∙00 |
0.67 |
|
3.15 |
— |
— |
7.10 |
0.44 |
5.40 |
0.58 |
|
2.50 |
— |
— |
6.30 |
0.39 |
4.80 |
0.52 |
|
2.00 |
9.10 |
0.220 |
5.60 |
0.35 |
4.20 |
0.47 |
|
1.60 |
8.30 |
0.190 |
5.00 |
0.32 |
3.10 |
0.43 |
|
1.00 |
6.60 |
0.150 |
4.00 |
0.25 |
3.00 |
0.33 |
|
0.63 |
5.20 |
0.120 |
3.20 |
0.19 |
— |
— |
|
0.40 |
4.10 |
0.098 |
2.50 |
0.16 | ||
|
0.25 |
3.20 |
0.078 |
— |
— |
— |
■. ■ |
|
0.16 |
2.50 |
0.064 |
— |
— |
■ ■ | |
4.3.2.5位移引起的载荷
应考虑包含在设计中的位移引起的载荷,例如在限定范围内引发补偿修正系统(如修正偏斜)响应 必需的位移,或由预加应力引起的位移。
还需考虑的其他载荷,包括可能由在规定限制范围内的位移引起的载荷,例如由轨道之间的高度或 轨距变化引起的载荷,或由支承物的不均匀沉降引起的载荷。
4.3.3偶然载荷
4.3.3.1工作状态风载荷
4.3.3.1.1工作状态风载荷的估算
露天工作的塔式起重机应考虑风载荷的作用。假定风可沿任意水平方向吹(即可沿塔式起重机最 不利的方向作用)。计算工作状态风载荷时,认为所有高度上的计算风压(计算风速)不变。
a)垂直作用在塔式起重机构件纵轴线上的风载荷按式(IO)计算。
验算塔式起重机结构时:Pwi= PuCA
验算起动驱动力时iPw2= espwCA , ........................( 10 )
验算控制运动的驱动力时:Pw3= etnpuCA
式中:
PWl——验算工作状态下塔式起重机结构时,垂直作用在所指构件纵轴线上的风载荷,单位为 牛顿(N);
Pw2—验算工作状态下起动驱动力时,垂直作用在所指构件纵轴线上的风载荷,单位为牛顿
(N);
PWi——验算工作状态下控制运动的驱动力时,垂直作用在所指构件纵轴线上的风载荷,单位 为牛顿(N);
C ——所指构件的空气动力系数,与构件的特征面积A 一起使用,见附录B;
A —所指构件的特征面积,单位为平方米(π√),见附录B;
C —起动驱动力系数,通常取孔=0.7;
εw —平均驱动力系数,通常取ε,rt= 0.37;
Pu∙——工作状态计算风速为d∙时的计算风压,单位为牛顿每平方米(N∕π√),见式(11)和 表19。
b)沿风向作用在总起升载荷上的风载荷,其计算式同式(10);但此时式中相关符号的含义有所 不同,说明如下:
PWl—工作状态沿风向作用在总起升载荷上的风载荷,单位为牛顿(N);
C 一一总起升载荷沿风向的空气动力系数;缺少总起升载荷详细资料时,取C =2.4;
A —总起升载荷在垂直于风向的平面上的投影面积,单位为平方米(∏√);缺少总起升载 荷详细资料时,取Λ =0.000 5m.,其中是总起升载荷的质量,单位为千克(kg), 但A不应小于0.8 m2o
4.3.3.1.2工作状态的计算风压和计算风速
计算风压P*按式(11)计算。
PS=O∙625τ< ........................( 11 )
式中:
pu.—工作状态计算风压,单位为牛顿每平方米(N∕m2);常用的T.作状态计算风压值见表19;
Pw——工作状态计算风速,单位为米每秒(m∕s),见表19o
当风向与塔式起重机某一构件纵轴线不垂直时,应采用垂直于该构件纵轴线的计算风速分量Pg 来计算Pw,ff∙∙ SinaU其中J为风向与所指构件纵轴线之间的夹角。但计算沿风向作用在总起 升载荷上的风载荷时,不应用代替”5
计算风速七为空旷平坦地面离地高10 m处或海拔10 m处的阵风风速,即3 S时距平均瞬时风 速,取为同样情况和高度处10 min时距平均风速电的1.5倍,即vtt. = 1.5v,o
10 min时距平均风速C与风力等级(蒲福风级)有关,应按塔式起重机工作地的气象数据选取。如 果塔式起重机可能在不同地区使用,则应将其设计成可适用于那些地区。
表19给出了工作状态常用的计算风速和计算风压值及其与10 min时距平均风速W八风力等级的 对应关系。制造商采用的风速和风压值,包括不同于表19的风速和风压值以及安装拆卸和试验时的风 速和风压值,应在塔式起重机设计和使用说明书中说明。
表19工作状态常用的计算风压P*和计算风速卩,及其相对应的10 min时距平均风速*和风力等级
|
工作条件 |
计算风压PW N/m2 |
计算风速Vtt m/s |
10 min时距平均风速Vp m/s |
风力等级 |
|
预定只在较低风力中工作 |
125 |
14.1 |
9.4 |
5 |
|
在正常风力中工作 |
250 |
20.0 |
13.3 |
6 |
|
在8级风中继续「•作 |
500 |
28.3 |
18∙9 |
8 |
如果在塔式起重机最高处测得的风速在增加并趋向于达到计算风速Pw,则应对其进行防护或应将 其配置转换为安全的配置。这是因为防护塔式起重机的方法和/或措施以及所需的时间不同,所以应在 风速较低的时候就开始进行防护。
注:任何细K的构件,当将其以纵轴线垂直于风向的方式放置在风流中时,可能会发生气动弹性振颤(如驰振或形 成涡旋)。因此相应于工•作状态和非工作状态风的情况.需考虑从设计上釆取措施来防止这些效应。
4.3.3.2冰雪载荷
对于某些地区,应说明和考虑冰雪载荷,也应考虑因冰雪积结而增加的受风面积。
4.3.3.3温度变化引起的载荷
对于某些地区,应说明和考虑当地的温度变化。
4.3.3.4偏斜运行引起的载荷
设有导向装置(导向滚轮或车轮轮缘)的塔式起重机或小车,当其以恒速纵向或横向移动时.会在车 轮的导向装置处产生偏斜载荷。该载荷是由导向的反作用力引起的水平力,导向反作用力使车轮偏离 其自由滚动、自然纵行或横移的方向。
上述偏斜载荷一般视为偶然载荷,但其出现的频率随塔式起重机或小车的类型、配置、轮轴的平行 度精度和维护情况而变化。在个别情况下,偏斜载荷的出现頻率决定着是将其视为偶然载荷还是常规 载荷。
采用车轮轮缘导向的,塔式起重机偏斜运行在轮缘与轨道之间引起的水平侧向力按附录C计算。
注:采用滚轮导向的.塔式起亜机偏斜运行在车轮与轨道之间、导向装置与导轨之间引起的侧向力和切向力,可以 用一个简化的机械模型来计算.见GB/T 22437.1- 2008的附录F或EN 13001-2:2004+ A3:2009的423.3.
使用普通底架时,塔式起重机的偏斜载荷可忽略不计。
由轨道运行机构的驱动力产生的加速或减速而在质址非对称分布的塔式起重机中引起的水平力 (如冇的话).视为常规载荷,在4.3.2.4中考虑。
4.3.4特殊载荷
4.3.4.1以最大起升速度提升地面载荷而引起的载荷
按4.3.2.2.1和表24,将用最大起升速度提升无约束的地面载荷而在塔式起重机fi产生的动力效应 所引起的载荷,视为特殊载荷纳入载荷组合Clo此时,动力系数知按表16给出的与载荷组合CI相对 应的稳定起升速度值来估算。
4.3.4.2非工作状态风载荷
4.3.4.2.1非工作状态风载荷的估算
应验算塔式起重机在非工•作状态承受风力的能力。计算非工作状态风载荷时,应考虑不同高度上 计算风压或计算风速的变化情况。
a) 垂直作用在塔式起重机构件纵轴线上的非工作状态风载荷按式(12)计算。
Pg=KhP"CA ........................( 12 )
式中:
PW.、一非工作状态垂直作用在所指构件纵轴线上的风载荷,单位为牛顿(\);
C ■所指构件的空气动力系数,与构件的特征面积A 一起使用,见附录B;
A ——所指构件的特征面积.单位为平方米(n√)∙见附录B;
KlI ——风压高度变化系数.见表21;
ρ., 一-非T.作状态计算风速为%时的计算风压,单位为牛顿每平方米(N∕n√),见式(15)和 表20。
b) 沿风向作用在剩余起升载荷上的非工作状态风载荷,其计算式同式(12);但此时式中相关符 号的含义有所不同,说明如下:
Pw.∖——沿风向作用在剩余起升载荷上的风载荷,单位为牛顿(、);
C —剩余起升载荷沿风向的空气动力系数;缺少剩余起升载荷详细资料时,取C =2.4;
A ——剩余起升载荷在垂直于风向的平面上的投影面积,单位为平方米(π√);缺少剩余起 升载荷详细资料时,剩余起升载荷的投影面积按式(13)计算,但A不应小于0.8 m2o
A = 0.000 5 7?WH ........................( 13 )
式中:
mH ——总起升载荷的质量,单位为千克(kg);
η ——非工作状态下剩余起升载荷的系数.按式(14)计算。
式中:
EH——非工作状态要求从总起升载荷中卸除的起升载荷(通常为有效起升载荷或 净起升载荷)的质量,单位为千克(kg);
H ---同式(13)。
4.3.4.2.2非工作状态计算风压和计算风速
计算风压丄按式(15)计算。
PW=O.625^ ........................( 15 )
式中:
Pn—非工作状态计算风压,单位为牛顿每平方米(N∕m2),见表20;
5——非工作状态计算风速,单位为米每秒(m/s),见表20o
当风向与塔式起重机某一构件纵轴线不垂直时,应采用垂直于该构件纵轴线的计算风速分量:纨来 计算P^υ,lf=v,. - sin。”,其中J为风向与所指构件纵轴线之间的夹角。但计算沿风向作用在剩余起 升载荷上的风载荷时,不应用払,代替矶。
计算风速S,为空旷平坦地面离地高10 m处或海拔Iom处50年一遇的10 min时距平均暴风风 速勿的1.4倍,即Vtl = I.4VhO瓦根据风速观测数据经概率统计得出,与风力等级(蒲福风级)有关。
50年一遇的10 min时距平均暴风风速瓦应按塔式起重机工作地的气象数据选取。如果塔式起重 机可能在不同地区使用.则应将其设计成可适用于那些地区。在vλ≥36 m/s或s250 m/s的地区使 用的塔式起重机,用户和制造商应就某些特殊条件达成一致。
如果在有产生飓风的地区安装塔式起重机或延长其使用周期,则按上述公式算出的非工作状态计 算风速和风压,应根据气象资料和/或空气动力学方面的因素进行修正。
对依靠自身机构在非工作状态时能够将塔身方便缩回的塔式起重机,只需按其低位置进行非工作 状态风载荷验算。这应在塔式起重机的使用说明书中写明,要求不工作时将塔身缩回固定好,以使其能 抗御暴风的袭击。
表22给出了非工作状态常用的计算风速和计算风压值及其与10 min时距平均暴风风速S、风力 等级的对应关系。制造商采用的任何非工作状态风速和风压值,均应在塔式起重机设计和使用说明书 中说明。
不同髙度的计算风速VAh)值,可按式(16)计算。
vw(Λ) = [(Λ∕10)oj, +0.4] VA ........................( 16 )
式中:
VAh)——高度h处的非工作状态计算风速,单位为米每秒(m/s);
h ——离地面或海面的高度,单位为米(m);
Pb ——50年一遇的10 min时距平均暴风风速,单位为米每秒(m/s)O
引入式(16),式(12)、式(15)可改为式(17):
PWN=PW( h ) X (. × A
- ........................(17 )
Pn Ch ) = 0.625 (K⅛v × vλ )2 J
式中:
PAh)——高度h处的非工作状态计算风压,单位为牛顿每平方米(N/m2);
KIlV —风速高度变化系数.Khv= (A∕10)0∙u +0.4;
式中其他符号同式(12)、式(16)o
表20非工作状态计算风压和计算风速
|
地 IX |
计算风压p'; N∕m2 |
与外相应的计算风速P: m/s |
|
内陆" |
500〜600 |
28.3-31.0 |
|
沿海・ |
600〜1 000 |
31.0 〜40.0 |
|
台湾省及南海诸岛 |
1 500 |
49.0 |
|
-非工作状态计算风压的取值,内陆的华北、华中和华南地区宜取小值.西北、西南、东北和长江下游等地区宜取 大值;沿海以上海为界,上海可取800、/π√,上海以北取小值.以南取大值。可根据当地气象资料提供的10 m 高处50年一遇的10 min时距平均暴风风速瓦来算出计算风速VJVAh)和计算风压pn∕pΛh)o b海上航行的塔式起重机,可取丄=1 800 N∕r√,但不再考虑风压高度变化.即取K,,=l° f沿海地区、台湾省及南海诸岛港口大型塔式起重机抗风防滑系统及锚定装置的设计.所用的计算风速码不应 小于55 m∕s(v*不应小于39.3 m/s)。 | ||
表21风压高度变化系数KA
|
项目 |
IZ Γ(Λ∕ιo)0∙,'+o..ιη2 KL 一M一 | ||||||||||||||
|
高度h m |
≤10 |
】0〜 20 |
20〜 30 |
30〜 40 |
40〜 50 |
50〜 60 |
60〜 70 |
70〜 80 |
80〜 90 |
90〜 100 |
100〜 110 |
110〜 120 |
120〜 130 |
130〜 140 |
140〜 150 |
|
KA |
1.00 |
].09 |
].21 |
1.29 |
1.36 |
1.42 |
1.47 |
1.52 |
1.56 |
1.60 |
1.63 |
1.67 |
1.70 |
1.73 |
1.75 |
|
高度h m |
150〜 160 |
160〜 170 |
170〜 180 |
180〜 190 |
190〜 200 |
200〜 210 |
210〜 220 |
. -----匚,. ZZ 220〜 230 |
230〜 240 |
240〜 250 |
250〜 260 |
260〜 270 |
270〜 280 |
280〜 290 |
290〜 300 |
|
Ktl |
1.78 |
1.80 |
1.83 |
1.85 |
1.87 |
1.89 |
1.91 |
1.93 |
1.95 |
1.97 |
1.99 |
2.01 |
2.02 |
2.04 |
2.05 |
|
注:计算非工作状态风载荷时,可沿高度划分成IOm高的等风压段,以各段中点高度的系数K」即表列数字)乘 以计算风压;也可以取结构顶部的计算风压作为塔式起重机全高的定值风压。 | |||||||||||||||
表22非工作状态常用的计算风压p“和计算风速v”及其相对应的10 min时距平均风速*和风力等级
|
/>-N∕m2 |
m/s |
Vb m/s |
风力等级 |
|
600 |
31.0 |
22.1 |
9 |
|
800 |
35.8 |
25.6 |
10 |
|
1 000 |
40.0 |
28.6 |
11 |
|
1 100 |
42.0 |
30.0 |
11 |
|
1 200 |
43.8 |
31∙3 |
11 |
|
1 300 |
•15.6 |
32.6 |
12 |
|
1 500 |
49.0 |
35∙0 |
12 |
|
1 800 |
53.7 |
38.4 |
13 |
|
1 890 |
55.0 |
39.3 |
13 |
4.3.4.3试验载荷
试验载荷应作用在处于工作状态配置的塔式起重机上,试验过程中其配置不应改变,如加大平 衡重。
试验载荷应乘以动力系数如。系数如的取值如下:
a) 动载试验:试验载荷由驱动机构以塔式起重机工作的方式来移动,试验载荷所包含的净起升载 荷(净起重量的重力)至少应为额定起重量重力的110%。此时夕6按式(18)计算。
L =0.5(1 + ≠2) ........................( 18 )
式中: 飢一一动载试验时的载荷动力系数; 灼一按4.3.2.2计算的动力系数。
b) 静载试验:试验时不使用驱动机构,试验载荷用加载的方式加在塔式起重机上,试验载荷所包 含的净起升载荷(净起重量的重力)至少应为额定起重量的125%。此时如=1。
验算试验载荷工况时,至少应考虑由计算风速Vw = 8.3 m∕s(对应计算风压PW= 43 N∕m2)引起的 风载荷。
4.3.4.4缓冲力产生的载荷
在使用缓冲器时,用刚体分析法算出的因碰撞而产生的力,应乘以考虑其弹性效应的动力系数们。 动力系数妇的取值如下:
——对于具有线性特性的缓冲器:们=1.25;
——对于具有矩形特性的缓冲器:≠7 = 1.6;
——对于具有其他特性的缓冲器,应采用经计算或试验证明的如值(见图8)0
们的中间值可按式(19)估算。
0≤e≤0.5 时: 妇=1.25
........................(19 )
0.5≤ξ≤l 时: S = L25+O∙7(<-O∙5)
式中的E值见图8。
L 6 V——為而m
≡ n≡ J
说明:
式中:
6 一-一相对缓冲能量;
F——最大缓冲力;
Fb——缓冲力;
L——最大缓冲行程;
U 缓冲行程。
图8动力系数。7
缓冲力应由塔式起重机所有相关部件以0.7倍〜1倍的额定速度运行时的动能来算出;如果有特殊 措施保证该值较小(例如另外设有使运动减速的自动控制系统),则即使该值小于0∙7也可釆用。如果 塔式起重机或小车绕垂直轴的转动受到限制,且其结构是刚性的,则两侧缓冲器的变形应认为相等;此 时若缓冲器的特性也类似,则两侧的缓冲力将相等。
如果塔式起重机或小车绕垂直轴的转动不受限制,或其结构是挠性的,缓冲力的计算应考虑相关质 量的分布情况和缓冲器特性。
计算缓冲力时,不需要考虑水平方向上无约束(自由摆动)的悬挂载荷的动力效应。但是,如果塔式 起重机在与缓冲器发生碰撞之前降低了运行速度,向前摆动的载荷有可能在缓冲器压缩的同时接近其 最大摆幅,此时应将起升载荷的质量乘以减速度作为接触缓冲器之前增大的水平载荷。
当塔式起重机的运行速度不大于0∙7 m/s且装有终端行程限位开关时,可不必考虑缓冲力。
4.3.4.5意外停机引起的载荷
意外停机(如停电)引起的载荷按4.3.2.4计算,计算时应考虑停机瞬间最不利的驱动状态(即加速 力与起升载荷的最不利组合)。
如缺乏详细数据,计算时可取如=2.0。
4.3.4.6机构或部件预期失效引起的载荷
如果釆用工作制动加紧急制动为塔式起重机提供保护,则认为失效和紧急制动动作均发生在最不 利状态下。
当为了安全而釆用两套机构或部件,或者其他保护措施时.若任一系统的任何部分失效,则应认为 该机构、部件或保护措施发生了失效。
由此产生的载荷应按4.3.2.4计算,计算时考虑所产生的冲击。
4.3.4.7塔式起重机基础受到外部激励引起的载荷
塔式起重机基础受到外部激励的实例是地震或其他振波引起的振动。在必要时,由外部激励引起
的载荷应明确规定和考虑。
4.3.4.8安装、拆卸和运输引起的载荷
应考虑在安装、拆卸过程中的每一个阶段发生的作用在塔式起重机上的各项载荷,包括由计算风速
4.1 m∕s(对应计算风压pw = 125 N∕n√ ,不考虑高度变化)引起的风载荷。构件或部件在任何情 况下都应进行在这些载荷作用下的承载能力验算。
在某些情况下,也需考虑在运输过程中产生的载荷,如整体拖运时拖运轮组所受的载荷.并应考虑 运输时的动力效应。
4.3.5作用在塔式起重机通道上的载荷
作用在塔式起重机通道上的载荷都是局部载荷,只作用在通道及其支承构件上。这些载荷的大小 与结构的用途和载荷的作用位置有关。
应考虑下列载荷:
——可堆放物料处的垂直载荷:3 OOO N;
——只作通道用时所承受的垂直载荷:1 500 N;
——栏杆扶手应能承受不小于300 N的水平载荷,具体视其位置和用途而定。
4.4载荷组合
4.4.1通则
釆用“极限状态法”进行验算时,选定的载荷组合中的载荷需乘以分项载荷系数厶(见表24)β 也可釆用有总安全系数厶的“许用应力法"。
本标准给出的安全系数是根据经验并考虑了特定载荷或加载的通常误差而确定的。
4.4.2高危险度系数应用
在某些情况下工作的塔式起重机(例如核能用塔式起重机),如失效会对人员或经济造成极为严重 的后果,因此引入特定的高危险度系数来提高其可靠性。高危险度系数按式(20)计算。
7„ =1.05"r ........................( 20 )
式中:
7..——高危险度系数;
E—蓦指数,l≤nr≤14;Wr应根据具体使用要求来选取。
对于有高度危险的情况,当釆用许用应力法时,应用高危险度系数厶来放大总安全系数以降低许 用应力;当采用极限状态法时,应用高危险度系数儿来放大组合载荷。
4.4.3质量分布类别
对应于分项载荷系数在重力载荷中的应用,可将塔式起重机划分为两个质量分布类别:
a) 质輦分布类别为MDCl的塔式起重机:
对于塔式起重机或其部件,如果作用在塔式起重机不同部件质量上的重力引起的所有载荷,都 增加了验算所选的所有关键点的载荷效应(“不利”)且不受预加位移(“预加应力”)的影响,则 认为这些塔式起重机或其部件的质量分布类别为MDCK见图9)o
对这种情况,应采用特定的分项载荷系数右值(见表23)o
b) 质量分布类别为MDC2的塔式起重机:
塔式起重机或其一个部件.如果其中至少有一个基本构件,塔式起重机某一部分质量的重力 载荷在其上减小了其载荷效应,或者其载荷效应受预加位移(“预加应力")的影响,则认为该 塔式起重机或该部件的质量分布类别为MDC2(见图9)0对这种情况,总质量应分为“不利的 质量”(其重力作用增加了所产生的载荷效应)和“有利的质量”(其重力作用降低了所产生的 载荷效应)。
7∕∕∕∕∕∕∕∕∕∕∕∕∕7/
7//////////////7
a)质■分布类别为MDCl的塔式起重机
b)质量分布类别为MDC2的塔式起重机
图9两种不同的质■分布类别示意图
4.4.4塔式起重机质量的分项载荷系数
对于塔式起重机的质量,分项载荷系数心应根据塔式起重机部件质量的确定方法和载荷效应的类 型按表23选取。
分项载荷系数的选取应对每一个相关的荷载组合分别进行,并且一个质量在不同的载荷组合中可 能有不同的分项载荷系数。
对于质量分布类别为MDC2的起重机,其某一质量,对其某一基本构件的某一载荷效应可能被认 为是“有利的”,而对另一载荷效应、另一基本构件或另一载荷组合则可能被认为是“不利的”。如果该质 量的作用能减小所产生的载荷效应,就认为是“有利的”。如果塔式起重机的一个部件(如塔式起重机的 上部回转结构)既有有利质量又有不利质量,则其在同一个载荷组合中只能有一个与其重心相关的分项 载荷系数。
表23分项载荷系数y,的值
|
确定塔式起重机部件 的质量:和重心的方法 |
4.4.5的载荷组合 | |||||
|
A |
B |
C | ||||
|
MDCl/MDC2 不利 |
MDC2 有利 |
MIX:!/MDC2 不利 |
MDC2 有利 |
MDCl/MDC2 不利 |
MDC2 有利 | |
|
计算 |
1.22 |
1.00 |
1.16 |
1.00 |
1.10 |
1.00 |
|
称址 |
1.16 |
1.10 |
1.10 |
1.05 |
1.05 |
1.00 |
4.4.5载荷组合说明
表24给出了各种基本载荷组合,用于防静强度失效和弹性失稳验算。
在验算疲劳强度时,应考虑载荷组合A并将所有分项载荷系数厶设为1.0o某些情况下载荷组合 B和/或C可能对疲劳的影响很大,也应予以考虑。
考虑无风工作、有风工作和在特殊载荷作用下工作或非工作三种情况,表24将载荷组合分为A、 B、C三类:
a)载荷组合A包括常规载荷的组合:
• Al:起升和下降载荷
通常应将这些载荷进行组合,以反映两个运动方向上的满载或空载的塔式起重机在加 速、减速和就位时的情况;以及在起升地面载荷或起升位于地面的吊具时,只应与在预 定的正常驱动控制下进行正常工作的其他驱动机构(不包括起升机构)引起的驱动加速 力相组合;
• A2:突然卸除部分起升载荷
此时应按AI的驱动加速力组合;
•A3:悬挂着载荷或吊具
悬挂着载荷或吊具时,应与在预定的正常驱动控制下进行正常工作的任何驱动机构(包 括起升机构)或这些机构在就位移动时连续的一系列动作引起的驱动加速力或减速力 进行任何组合;
• A4:在不平轨道上运行
此时应按Al的驱动加速力组合。
b)载荷组合B包括常规载荷与偶然载荷的组合:
• BI-B4:与相应的载荷组合Al〜A4相同,但还应考虑工作状态风载荷和其他环境作用引
起的载荷;
• B5:塔式起重机正常工作时在不平轨道上恒速偏斜运行,有工作状态风载荷和其他环境作
用引起的载荷。
C)载荷组合C包括常规载荷、偶然载荷和特殊载荷的组合:
• C1:塔式起重机在工作状态下,以最大起升速度起升地面载荷,所采用的们见4.3.2.2.1; •C2:塔式起重机在非工作状态下,包括非工作状态风载荷和其他环境作用引起的载荷;
• C3:塔式起重机在试验状态下,包括试验风载荷;对于动载试验,还应按AI的驱动加速力
组合;
• C4:塔式起重机带有起升载荷与缓冲力相组合;
• C5:塔式起重机带有起升载荷与意外停机引起的载荷相组合;
• C6:塔式起重机带有起升载荷与机构失效引起的载荷相组合;
• C7:塔式起重机带有起升载荷与起重机基础受外部激励引起的载荷相组合;
•C8:塔式起重机安装、拆卸和运输引起的载荷。
GBJT 一375212017
表24载荷与载荷组合表
|
载荷 类型 |
载荷/. |
行 号 i |
相应 条款 |
载荷组合Λ |
栽荷組合B |
裁荷组合C | |||||||||||||||||||
|
分项载 荷系数 |
ʌɪ |
Λ2 |
A.∙ |
Al |
分项载 荷系数 |
Bl |
B2 |
B3 |
Bl |
B5 |
分项裁 荷系数 |
Cl |
C2 |
C3 |
CI |
(' I |
C6 |
C7 |
C8 | ||||||
|
常规 载荷 |
重力 加速力 冲击力 |
塔式起电机质M______ |
] |
4∙3 2∙1 |
I |
≠l |
77 |
— |
ΞΞ |
77 |
们 | ||||||||||||||
|
起升载荷质址 |
2 |
4.3.2.2 |
1.34 |
≠Γ |
1 |
— |
1.22 |
Tr |
-F" |
— |
— |
1.1 |
ri |
一一 |
1 |
1 |
1 | ||||||||
|
在不平轨道上运专的塔式 起亜机和起升载荷质話 |
3 |
4.323 |
1.22 |
— |
— |
— |
≠. |
1.16 |
— |
— |
— |
≠∙ |
— |
∙≡≡∙ |
—≡∙ | ||||||||||
|
製动 加速力 |
塔式起車 机和起升 载荷质t⅛ |
不含起升机构 |
4 |
4.324 |
1.34 |
— |
1.22 |
农∙i |
≠ > |
4 |
1.1 |
—— | |||||||||||||
|
含起升机构 |
5 |
≠ |
— |
―一 |
夕 |
—一 |
I | ||||||||||||||||||
|
位移引起的裁荷 ___ |
6 |
4∙3∙2∙5 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
~Γ |
1 |
^^i~ |
I | |||||||||
|
偈然 载荷 |
环境 作用 |
工作状态风载荷______ |
7 |
4.3.3.1 |
— |
— |
— |
— |
■— |
1.22 |
1 |
1 |
1 |
1 |
1.16 |
— |
—- | ||||||||
|
冰等载荷 |
8 |
4∙332 |
一 |
1.22 |
~Γ |
~Γ^ |
~Γ |
~Γ |
1.1 |
1 |
—— |
— |
— |
— | |||||||||||
|
温度变化引起的栽荷 — |
9 |
4∙3∙3∙3 |
.一 |
— |
1.16 |
1 |
1 |
~i~ |
~7~ |
1.05 |
— |
— | |||||||||||||
|
偏斜载荷_____________ |
IO |
4.3 3.4 |
一 |
..... |
— |
—— |
— |
1.16 |
— |
. |
— |
■ ■ ■ |
-I- |
■ ■ ■ |
— |
, | |||||||||
|
待殊 载荷 |
最大起升速^⅞起升地面载荷 |
11 |
4∙3∙4∙1 |
— |
— |
— |
Ll |
— |
— |
■ |
-―— | ||||||||||||||
|
非T.作状态风载荷 |
12 |
434∙2 |
■― |
—≡ |
- |
W ■ |
1.】6 |
■一・ |
一一 |
■ | |||||||||||||||
|
试就截荷 |
13 |
4∙3∙4∙3 |
— |
一 |
— |
一. |
1.1 |
— |
一 ■ | ||||||||||||||||
|
缓冲力 |
14 |
4∙3∙4.4 |
— |
— |
— |
■ |
— |
— |
— |
—^∙ |
1.1 |
— |
夕7 |
I ■ • |
—- | ||||||||||
|
意外停机引起兩载荷 |
15 |
4∙3∙4∙5 |
— |
1.1 |
■—一 |
— |
—■ |
.. ■ | |||||||||||||||||
|
机构失效引起的载荷 |
16 |
4∙3∙4∙6 |
— |
—■ |
— |
1.1 |
— |
— |
TT |
— | |||||||||||||||
|
基础受外部激励引起的载荷 |
17 |
4∙3∙4∙7 |
一. |
■— |
— |
— |
— |
— |
— |
— |
1.1 |
— |
. |
— |
— |
— | |||||||||
|
安装、拆卸和运输发生的载荷 |
18 |
1∙3.4∙8 |
一 |
—・・ |
— |
— |
■ . |
— |
— |
— |
— |
— |
~LI~ | ||||||||||||
|
总安全系数If |
1.48 |
1.34 |
1.22 | ||||||||||||||||||||||
|
抗力系数厶 |
1.1 |
1.1 |
1.1 | ||||||||||||||||||||||
,塔式起垂机成址的分项载荷系数见表23.
29
4.5抗倾覆稳定性和抗风防滑安全性
4.5.1基本要求与假定
4.5.1.1塔式起重机应通过计算来校核其整体抗倾覆稳定性。对于露天工作并在轨道上运行的塔式起 重机,还应校核其抗风防滑安全性。
4.5.1.2校核计算的假定是,塔式起重机在坚实、水平的支承面上或轨道上工作。若塔式起重机需要在 倾斜面上工作,在校核计算时制造商应考虑此特定条件,加上倾斜坡度的影响并予以说明。
注:也可按GB/T 20304-2006的第4章来进行抗倾覆稳定性的验算。
4.5.2抗倾覆稳定性
4.5.2.1抗倾覆稳定性的验算
塔式起重机整体或其部件的抗倾覆稳定性(刚体稳定性),按表25规定的五种工况和计算载荷进行 验算。
在验算中,塔式起重机的配置及其零部件的位置、各项载荷和力作用的方向及其影响,均按实际可 能出现的最不利组合来考虑。
对于表25规定的每种工况.分别计算其各项载荷对倾覆边的力矩,当稳定力矩的代数和大于倾覆 力矩的代数和时,则认为该塔式起重机在该工况下其整体是稳定的。其中自重载荷产生稳定力矩,除自 重载荷外其他载荷产生倾覆力矩。
4.5.2.2在轨道上带载运行的塔式起重机
对于在轨道上带载运行的塔式起重机,还应当考虑制造商在使用说明书中规定的轨道允许的最大 垂直高度差和坡度所引起的载荷,并将其作为其他载荷列入表25工况II中。
4.5.2.3地震或其他的基础外部激励效应
在具体使用现场或地区如有地震或其他的基础外部激励效应,则在相应的工作状态或非工作状态 抗倾覆稳定性验算中,将其作为附加的载荷情况予以考虑(参见4.3.4.7)o
4.5.2.4吊具质量引起的载荷
按表25计算时,应考虑塔式起重机所有吊具引起的载荷,包括工作状态所用的固定吊具。
4.5.2.5抗后倾覆稳定性
工作状态下抗后倾覆稳定性按表25中的工况DI计算。
4.5.2.6风载荷的作用
4.5.2.6.1工作状态风载荷按最不利方向施加。
4.5.2.6.2对于不能随风自由回转的塔式起重机,非工作状态风载荷按最不利方向施加。对于可随风 回转的塔式起重机,非工作状态风载荷应按设计预期的方向施加于塔式起重机的上部结构,并按最不利 方向施加于塔式起重机的下部结构。
4.5.2.7塔式起重机的基础
制造商应提供在允许使用的所有工况中(包括有非工作状态风载荷作用时),塔式起重机对地面或基础作 用的载荷,并说明与其相对应的使用工况。如果用塔式起重机的基础来实现其部分或全部抗倾覆稳定时,制 造商还应规定对该基础的要求。当塔式起重机需在斜面上作业时,制造商应考虑相应的验算工况。
4.5.2.8临时辅助稳定装置
在表25的工况I至IV的状态下,塔式起重机不使用临时辅助稳定装置时,也应是稳定的。
临时辅助稳定装置可用来满足表25中工况V的抗倾覆稳定性要求,即可用临时辅助稳定装置来保 证安装或拆卸时的抗倾覆稳定性。
可用可拆卸的压重来满足表25工况IV的抗倾覆稳定性要求。但当没有这些外加的压重,并且将风 载荷取为1.1 Pw∖∙[Pw∙∖见式(12)]时,该塔式起重机也应符合稳定要求。
表25抗倾覆稳定性验算的工况和计算载荷
|
工况和计算条件 |
载荷名称 |
载荷值 | |
|
正常T∙作状态 |
1基本稳定性(静态、无风) |
口重载荷 |
PG |
|
起升载荷 |
1.6PQ | ||
|
风载荷 |
0 | ||
|
惯性力 |
0 | ||
|
∏动态稳定性(动态、有风) |
自車载荷 |
PG | |
|
起升载荷 |
1.35PQ | ||
|
风载荷 |
P W I | ||
|
惯性力 |
PI) | ||
|
In抗后倾覆稳定性(有向后吹的 风,且突然空中卸载) |
自重载荷 |
PG | |
|
起升载荷 |
— 0.2PQ | ||
|
风载荷 |
PWI | ||
|
惯性力 |
0 | ||
|
非工作状态 |
IV抗暴风稳定性(非工作时遭暴 风袭击) |
n重载荷 |
PG |
|
起升载荷 |
Pq. | ||
|
风载荷 |
1.2PWN | ||
|
惯性力 |
0 | ||
|
安装拆卸 |
V安装拆卸稳定性(在许可的风 中进行安装或拆卸) |
自重载荷 |
PCI |
|
水平载荷 |
0.1 P2 | ||
|
垂直载荷 |
1.16 P2 | ||
|
风载荷 |
Pin | ||
|
惯性力 |
PD | ||
|
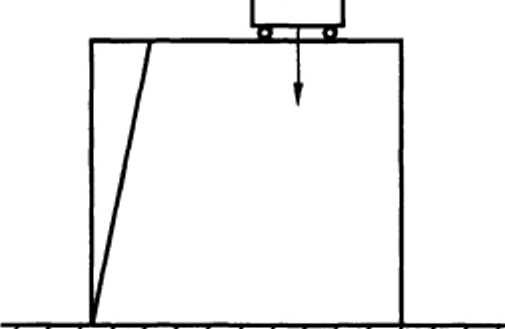
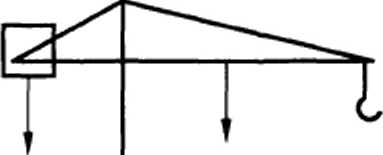
注:PG —-自重载荷(塔式起重机的重力),见4.3.2.1; PD ——由机构駆动产生的惯性力,此时取≠-l = l,见4.3.2.4; PQ —包含额定起重量的总起重量:的重力; PQX —剰余起升载荷; P2 —安装或拆卸时被装上或拆除的部件的重力图IO的示例; PWl —塔式起重机工作状态风载荷,见式(10); Pu-V ——塔式起重机非工作状态风载荷,见式(12); PWl ——塔式起重机安装拆卸工况的风载荷.见4.3.4.80 | |||
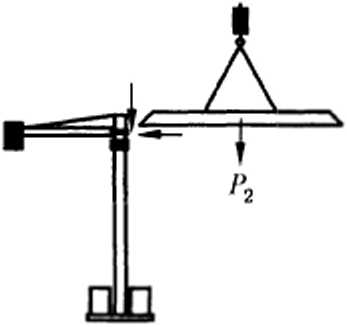
图10安装起重臂时的载荷P2示例
4.5.2.9 变形的影响
如果按二阶理论计算的塔式起重机在最不利的配置和最不利的载荷组合工况下的变形在塔身中增 加的弯矩不大于10%(可按N/NE<0.1界定,N、NE见5.4.2.1.1),则在抗倾覆稳定性验算中可不考虑 此变形的影响,以简化计算。但是,如该变形的影响超出上述范围,则表25各工况的倾覆力矩应考虑按 二阶理论计算的变形的影响。
4.5.2.10安装和拆卸过程中的抗倾覆稳定性
应根据塔式起重机的型式和安装/拆卸程序,对在安装和拆卸过程中各个阶段的危险状态进行抗倾 覆稳定性验算。
4.5.3抗风防滑安全性
4.5.3.1基本要求
对于露天工作并在轨道上运行的塔式起重机,无论工作状态还是非工作状态,其在轨道的每个位置 都应保持稳定,不应在相应极限风力作用下沿轨道滑移。
4.5.3.2 正常工作时
核算抗风防滑安全性时.塔式起重机的正常工作状态设定为带载、顺风、下坡运行制动,此时抗风防 滑安全性按式(21)验算。
PZI ≥ 1.2 PWl + Paf; + 1.35 PaQ + PI) 一 Pf ........................( 21 )
式中:
PZl—运行机构制动器在车轮踏面上产生的制动力,单位为牛顿(N);
Pm——同式(10);
Ps — 自重载荷沿坡道方向产生的滑行力,单位为牛顿(N);
Pg——额定起升载荷沿坡道方向产生的滑行力,单位为牛顿(N);
PD ——塔式起重机运行停机减速惯性力,单位为牛顿(N) .按4.3.2.4计算,取夕5 = 1,
Pf ——塔式起重机运行摩擦阻力,单位为牛顿(N)。P,=s(P<;+PQ),其中P~〉q见表25,S为 运行摩擦阻力系数,按表26选取。
当制动力Pzi大于被制动车轮与轨道的黏着力(即摩擦力)时,Pz∣用被制动车轮与轨道的黏着力代 替。计算黏着力时,摩擦系数7■按表26选取。仅有部分车轮制动力大于车轮与轨道的黏着力时,则应 按不同情况的车轮分别进行计算。
4.5.3.3 非工作状态
在非工作状态(暴风侵袭),应使用锚定装置(如夹轨器)防止塔式起重机在非工作状态最大风力作 用下沿轨道滑移。塔式起重机非工作状态的抗风防滑安全性按式(22)验算。
P Z2 2 1・2 P WN P a(i P θQ∖ 一 P f
........................(22 )
式中:
Pz2 —制动器、夹轨器等装置沿轨道方向产生的抗风防滑阻力,单位为牛顿(N),夹轨器单独作 用时Pz2= PX八其中P为夹轨器对轨道产生的夹持力"为摩擦系数,按表26选取;
PWN —塔式起重机非工作状态风载荷,单位为牛顿(N),见式(12);
PeG ---同式(21);
PeQl —剩余起升载荷(即表25的PQl)沿坡度产生的滑行力,单位为牛顿(N);
Pf——非工作状态下塔式起重机的运行摩擦阻力,单位为牛顿(N);P/=s(P(; + PqQ,其中 Pg、PQI见表25,勿为运行摩擦阻力系数,按表26选取。
当制动器的制动力大于被制动车轮与轨道的黏着力时,则用其黏着力来代替其抗风防滑阻力而计 算岀PZ2。计算黏着力时,摩擦系数/按表26选取。仅有部分车轮制动力大于车轮与轨道的黏着力 时,则应按不同情况的车轮分别进行计算。
表26运行摩擦阻力系数和摩擦系数
|
运行摩擦阻力系数3 |
摩擦系数/ | ||
|
装滑动轴承的车轮 |
装减摩(滚动)轴承的车轮 |
轨道与制动车轮之间 |
轨道与夹轨钳之间 |
|
0.015 |
0.006 |
0.14 |
0.25 |
4.6支承反力的确定
4.6.1基本原则
确定塔式起重机支承反力时,应考虑塔式起重机及其底架、支腿与基础组成的系统的联合工作情 况。附着式和内爬式塔式起重机还应考虑与建筑物支承组成的系统的联合工作。
4.6.2轨道运行式和带有底架的固定式塔式起重机
4.6.2.1垂直支承反力
支座或车轮(台车)的垂直支承反力一般按刚性底架四支点支承来计算。当一个车轮或支座的支承 反力岀现负值时,应按三支点支承重新计算。
4.6.2.2轨道运行式塔式起重机的水平支承反力(水平力)
轨道运行式塔式起重机沿轨道方向的水平支承反力(由运行机构制动所产生)的绝对值,不应大于 制动车轮与轨道之间的黏着力。
轨道运行式塔式起重机的缓冲力见4.3.4.4,偏斜运行引起的偏斜载荷见4.3.3.4o
4.6.3附着式塔式起重机
塔身附着于建筑物或构筑物的塔式起重机,应按弹性支座的多跨连续梁来计算其支承反力,该力即 为附着装置的载荷。
塔身上部最高附着点(塔身悬臂支承端)的支承反力最大,应取该反力值作为附着装置及建筑物支 承装置的计算载荷。
4.6.4内爬式塔式起重机
计算内爬式塔式起重机支承反力时,应根据具体支承方案确定简化力学模型。
4.7轨道和基础
4.7.1通则
4.7.1.1塔式起重机的轨道和地基基础应能承受塔式起重机工作状态和非工作状态的最大载荷,并应 满足塔式起重机抗倾覆稳定性的要求。
4.7.1.2塔式起重机地基基础设计,应以所设置场地的岩土工程勘察报告作为地质条件的依据。
4.7.1.3如果基础设计限制了塔式起重机的独立高度,应明确说明这种情况下最大独立高度。
4.7.1.4在具体使用现场或地区如有地震或其他的基础外部激励效应,或者政府法令或技术规范对此 有明确的要求,则塔式起重机用户应向基础设计者提岀要求并提供地震谱等信息,设计者在设计验算中 应将其作为特殊载荷予以考虑。
4.7.2轨道及其基础
应特别注意轨道转弯处的设计、布置和敷设。
不应焊接或加热轨道,除非得到熟悉材料和焊接的专业工程师的许可。
塔式起重机的大车运行轨道应符合GB 5144.GB/T 10183.1的要求。
轨道基础按工作需要可采用碎石基础或混凝土基础,并符合GB 5144的要求。
4.7.3固定式混凝土基础
4.7.3.1 通则
4.7.3.1.1安装塔式起重机的固定式混凝土基础,应尽量采用方形基础。
4.7.3.1.2地基主要受力层的承载力特征值厶不宜小于1.60×105 N∕m2 ,并由所设置场地的岩土工程 勘察来验证。如不满足要求,宜按JGJ 79的规定对地基进行处理,使其满足要求。
当基础宽度大于3 m或埋置深度大于0.5 m时,应将岩土工程勘察报告提供的地基承载力特征值, 按GB 50007的规定进行修正。经过处理的复合地基,其兀值应按JGJ 79的规定计算。
4.7.3.2混凝土基础验算的基本要求
4.7.3.2.1混凝土基础至少应验算表25规定的五种工况。
4.7.3.2.2在验算时,塔式起重机的结构形态及其零部件的位置、各项载荷和力作用的方向及其影响, 均按实际可能出现的最不利组合来考虑。
4.7.3.2.3在釆用表25规定的计算载荷进行验算时,基础底面允许部分脱开地基土的面积不应大于其 底面面积的1/2。
基础的强度及其地基的承载能力和稳定性应满足4.7.3.3-4.7.3.5的要求。此外,还应注意某些施 工等对地基产生干扰的情况。
4.7.3.3方形地基承载能力和基础底面脱开地基土的面积的验算
4.7.3.3.1基础底面平均压应力Pk
基础底面平均压应力久应满足式(23)0
式中:
Pk—基础底面处的平均压应力值,单位为牛顿每平方米(N/m2);
Fk—塔式起重机作用于基础顶的垂直载荷,单位为牛顿(N),见图11;
Gk—基础及其上土的自重载荷(重力),单位为牛顿(N),见图11;
b —基础底面边长,单位为米(m),见图11;
fa—修正后的地基承载力特征值,单位为牛顿每平方米(N∕r√),见4.7.3.1.2。
|
Z | ||
|
‘〃〃〃/7〃, |
,〃//〃〃/ |
图11作用在基础上的载荷
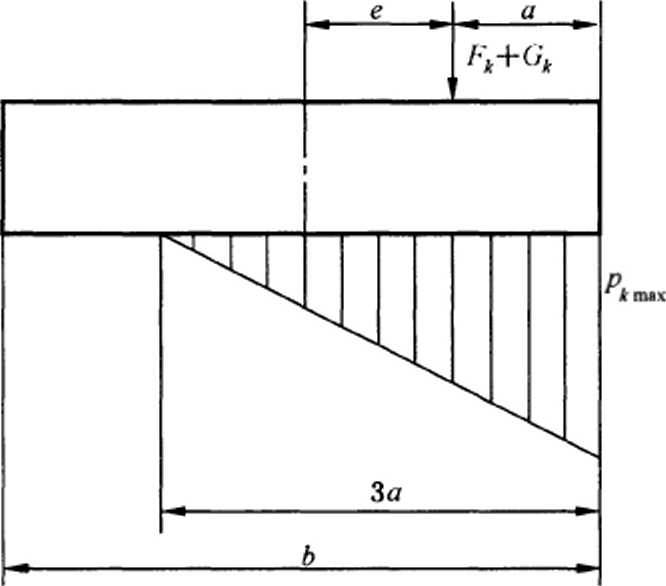
图12偏心距e>b∕6时的基础底面压应力计算示意图
4∙7∙3∙3∙2基础底面最大压应力PJkmM和最小压应力Pk Vnin
基础底面边缘的最大压应力PE “应满足式(24),基础底面边缘的最小压应力久min按式(25)计算。
Pk + Gk 丄 M* + FVk Xh
(24 )
林 ' TI? W 1∙Z J α
Fit ÷ GIt Mk 4- FVi × h Z Or X
=—專---∣y.... ........................( 25 )
式中:
Pg—基础底面边缘的最大压应力值,单位为牛顿每平方米(N∕m2);
。侦m—基础底面边缘的最小压应力值,单位为牛顿每平方米(N∕m2);
Mk ——塔式起重机起重臂与基础底面某一边平行时,作用于基础顶面的力矩值,单位为牛顿米
(N・m),见图11 ;
—塔式起重机起重臂与基础底面某一边平行时,作用于基础顶面的水平载荷值,单位为牛
顿(N),见图11;
h ——基础的厚度,单位为米(m),见图11;
W —基础地面的抵抗矩,单位为三次方米(π√),W =胪/6;
式中其他符号同式(23)。
4.7.3.3.3基础底面脱开地基土面积的验算
当按式(25)计算的∕>tmιn<O(即偏心距e>b∕6)时,基础底面边缘的最大压应力 久林应满足式 (26),同时应验算基础底面脱开地基土的面积。
按4.7.3.2.3的规定,在釆用表25规定的计算载荷进行验算时.基础底面允许部分脱开地基土的面 积不应大于其底面面积的1/2,即偏心距e应满足式(27)。
P k max
2(已 +GQ
3ba
≤ l.2fa
........................(26 )
式中:
α —合力作用点至基础底面最大压力边缘的距离,单位为米(m),见图12,q = (∕√2)-c 式中其他符号同式(23)、式(24)0
玲+①
........................(27 )
式中:
e ——偏心距,即合力作用点至基础中心的距离,单位为米(m),见图12; 式中其他符号同式(23)、式(24)。
4.7.3.4地基稳定性验算
设置在斜坡上或边坡附近的塔式起重机基础,应按GB 50007的规定进行地基稳定性验算。
4.7.3.5基础的强度和构造
基础的强度和构造,应根据具体情况,按GB 5001OJGJ 94进行设计和验算。
基础中与塔式起重机连接的钢结构件,应按4.7.3.2和第5章等有关规定进行设计和验算。
基础的厚度不宜小于1 mo 4.8运输
塔式起重机的运输应符合铁路和公路运输的有关规定。
整体拖运的塔式起重机的拖运轮组的轴负荷不应超过1∙3X1O'N。拖运轮组应设有驻车制动器, 保证在6%的坡度上能可靠制动。
4.9平衡重
上回转塔式起重机可按塔身受载最小的原则确定平衡重质量。
下回转塔式起重机应根据抗倾覆稳定性条件确定平衡重质量。
4.10安全要求
塔式起重机应符合GB 5144规定的安全要求。
5结构
5.1通则
5.1.1 一般要求
塔式起重机金属结构应进行强度(包括疲劳强度)、刚性和弹性稳定性验算,并满足抗脆性破坏规定
的要求。
本标准不考虑材料的塑性影响,即不接受按塑性理论计算的极限承载能力。
本标准仅考虑名义应力,即釆用传统材料弹性强度理论计算的应力,不包括局部应力集中效应,见 4.1.20如果在本标准规定的验算中采用其他应力计算方法(如冇限元分析)计算的应力,则会得到偏于 保守的结果。
5.1.2计算方法
塔式起重机钢结构及其连接的设计计算可采用极限状态法或许用应力法。当结构件内力与载荷呈 非线性关系时,宜采用极限状态法,见4.1.7。
极限状态法和许用应力法的验算步骤见4.1.7o采用•'极限状态法”进行验算时,选定的载荷组合中 的载荷(见4.3和4.4)需先乘以各自的分项载荷系数厶(见表24)。
5.1.3计算规定
5.1.3.1本章中计算公式均按极限状态法给出。若用许用应力法•则所有强度和弹性稳定计算公式左 端的弯矩、扭矩、轴向力都不考虑分项载荷系数厶和高危险度系数儿(见4.4.2),右端的极限设计应力 Iimσ改为许用应力官],许用应力O]用屈服点y除以总安全系数考(见表24)得到,即心]=σs∕γfi管 接头计算时所有的 E用/√M5∕rβ,代替(厶为抗力系数,取为1.1,见表24)。
此外.若用许用应力法进行弹性稳定性验算.则在正文和附录J的公式中.所有轴力比N∕Ne∙处,均 需在N前乘以α =1.22的调整系数,式(55)中的轴力N也需乘以该Q调整系数。
5.1.3.2用极限状态法验算结构和构件静态刚性时,取分项载荷系数∕p = lo
5.2 材料及其极限设计应力
5.2.1结构件材料及其极限设计应力
5.2.1.1结构件材料
5.2.1.1.1塔式起重机承载结构件钢材的选择,应考虑结构的重要性、载荷特征、应力状态、连接方式和 塔式起重机丁.作温度等因素。
主要承载结构的构件,宜采用力学性能不低于GB/T 700规定的Q235或GB/T 699规定的20钢; 也可采用力学性能不低于GB/T 1591规定的Q345高强度钢材。
采用厚度大于50 mm的钢板作为焊接承载构件时应慎重,当用作拉伸、弯曲等受力构件时,需增加 横向取样的拉伸和冲击韧性检验。
下列承载结构的构件不应采用沸腾钢:
a) 符合下列情况的焊接结构:
•直接承受动载荷且需要验算疲劳的结构;
•虽可以不验算疲劳但工作环境温度低于一20 °C时直接承受动载荷的结构以及受拉、受弯 的敢要承载结构;
•工作环境温度等于或低于一30 1的所冇承载结构。
b) 工作环境温度等于或低于一20 °C时直接承受动载荷且需要计算疲劳的非焊接结构。
5.2.1.1.2采用高强度钢材的结构构件,应特别注意选择合理的焊接工艺,进行相应的焊接试验,以减 小其内应力,防止焊缝开裂及控制高强度钢材结构的变形。
5.2.1.1.3室外工作塔式起重机的结构丁.作环境温度,在用户未特别提出时,可取为塔式起重机使用地点的 年最低日平均温度。对不确定使用地点的塔式起重机,工作环境温度由设计制造单位根据销售情况确定。
5.2.1.1.4为使所选的结构件钢材具有足够的抗脆性破坏安全性.应根据影响脆性破坏的条件来选择 37
钢材的质量组别,即应评价导致构件钢材材脆性破坏的下列各因素的影响:
纵向残余拉伸应力与自重载荷引起的纵向拉伸应力的联合作用;
构件材料的厚度;
工作环境的温度。
考虑影响脆性破坏因素评价的钢材质量组别选择方法参见附录D。
5.2.1.1.5钢铸件宜釆用符合GB/T 11352或GB/T 14408的铸钢。
5.2J.2结构件材料的极限设计应力
结构件材料的极限设计应力见表27o
表27结构件材料的极限设计应力
|
材料的屈服点5与抗拉 强度勾的比值 |
拉伸、压缩、弯曲极限设计 应力Iimσ |
|
-~≤0.7 时 |
.. Z lιmσ= f m |
|
— >0.7 时 |
l. 0.5σi ÷O.35σA IImb =------------ |
|
注:—一材料的屈服点(当材料无明显的屈服点时 时的试验应力),单位为牛顿每平方毫米( 勾一材料的抗拉强度,单位为牛顿每平方毫米 limσ——材料的拉伸、压缩、弯曲极限设计应力,单 L 一一抗力系数,取为1.1; Iimr —一材料的剪切极限设计应力,单位为牛顿每 Iim/——材料的端面承压极限设计应力,单位为牛 | |
|
剪切极限设计应力 Iimr |
端面承压极限设计应力 Iimq |
|
1. limσ Ilmr=—, √3 |
Iimbr = 1.4 Iima |
|
L取久为bo∙2,b°∙2为材料标准拉力试验残余应变达0.2% N∕mm2) J :(N/mm2); .位为牛顿每平方毫米(N∕mm2)t :平方臺米(Wmm2); 顿每平方毫米(N∕mm2)o | |
5.2.2连接材料及其极限设计应力 5.2.2.1焊条、焊丝
手工焊接所用焊条应符合GB/T 5117.GB/T 5118的要求。焊丝应符合GB/T 811O.GB/T 5293
的要求。
直接承受动载荷的焊接结构宜釆用碱性低氢型焊条。 焊条、焊丝及焊剂应与母材的力学性能相适应。
5.2.2.2螺栓、销轴等
普通螺纹连接用螺栓、螺母的机械性能和材料应符合GB/T 3098.1.GB/T 3098.2和GB/T 3098. 4 的要求。
髙强度螺栓、螺母和垫圈的机械性能和材料应符合GB/T 1231和GB/T 3632的要求;对于未包含 在 GB/T 1231 和 GB/T 3632 内的,应符合 GB/T 3098∙l、GB/T 3098.2 和 GB/T 3098.4 的要求。
销轴的材料宜釆用符合GB/T 699规定的45钢或符合GB/T 3077规定的40Cr、35CrMo、42CrMo 等钢材,并进行必要的热处理。
5.2.2.3连接材料的极限设计应力
焊缝的极限设计应力见表28,螺栓、销轴连接的极限设计应力见表29。
表28焊缝的极限设计应力
|
焊缝形式 |
拉、压极限设计应力IimbW |
剪切极限设计应力IimrW | ||
|
对接焊缝 |
质鱼分级 |
B、C |
limσ |
Iimb √Γ |
|
D |
O.8Iimσ |
CIimb 0.8 —- √2 | ||
|
角焊缝 |
自动焊、手工焊 |
■ |
Iimb √Γ | |
注 1: limσ—见表 27。
注2:表中给出的极限设计应力是计算焊缝静强度时采用的数值,计算疲劳强度时见疲劳计算的有关规定。
注3:焊缝质量分级按GB/T 19418的规定。
表29螺栓和销轴连接的极限设计应力
|
接头种类 |
应力种类 |
螺栓或销轴 |
结构件 |
|
钗制孔螺栓连接 (A、B級螺栓) |
拉伸 |
Iimσz = 0.8 ? f W |
— |
|
单剪切 |
1. J IlmT =---— 1.3√3∕m |
—— | |
|
多剪切 |
1. J Iimr = -— √3∕M | ||
|
单剪切承压 |
— |
Iimσ. = 1.41imσ | |
|
多剪切承压 |
limq. = 1.8limσ | ||
|
普通螺栓连接 (C级螺栓) |
拉伸 |
Iimσ, = 0.8 产 • M | |
|
单的切 |
.. Od IImr =---— 1.3√3∕m |
"-I | |
|
多剪切 |
1. J Iimr = -— √3∕m |
—■ | |
|
单剪切承压 |
. |
Iimq= Lllimo | |
|
多剪切承压 |
■ |
Iimq= 1.4limσ |
表29 (续)
|
接头种类 |
应力种类 |
螺栓或销轴 |
结构件 |
|
销轴连接 |
拉伸 |
Iimb' = Iimb | |
|
单剪切 |
.. Iimb IImr =---- 1.3√3 |
一一 | |
|
多乾切 |
,. Iimb IImr= _ √3 | ||
|
单剪切承压 |
— |
Iimq = l.llimσ | |
|
多剪切承压 |
Iimq = 1.41ιmσ | ||
|
注1: Iim/—螺栓或销轴的拉伸极限设计应力.单位为牛顿每平方毫米(N∕mm2), Iimr --螺栓或销轴的诃切极限设计应力,单位为牛顿毎平方毫米(N∕mm-); Iim/——螺栓或销轴连接中的结构件端面承压极限设计应力,单位为牛顿每平方毫米(N∕mm2); limσ -—见表 27; Ym -—抗力系数.取为1.1; σ,z ——与螺栓性能等级相对应的螺栓名义屈服点,见表3()。 注2:当销轴在工作中诃能产生微动时.应采用多剪切形式,结构件的承压极限设计应力适当降低.取单剪切形 式的承压极限设计应力。 | |||
表30螺栓和螺柱的机械性能
|
序号 |
机械性能 |
性能等级 | |||||||||
|
4.6 |
4.8 |
5.6 |
5.8 |
6.8 |
8.8 |
9.8 J≤16mm |
10.9 |
12.9 | |||
|
J≤16mm |
d>16mm | ||||||||||
|
1 |
抗拉强度σw N∕mm2 |
400 |
400 |
500 |
500 |
600 |
800 |
800 |
900 |
1 000 |
1 200 |
|
2 |
名义屈服点C N∕mm2 |
240 |
320 |
300 |
400 |
480 |
640 |
640 |
720 |
900 |
1 080 |
|
注:d—螺栓或螺柱公称直径。 | |||||||||||
5.3静强度验算
5.3.1结构件的强度验算
5.3.1.1 通则
塔式起重机受拉、受压、受弯、受扭结构件的强度验算可按通常的力学方法进行,计算应力应小于规 定的极限设计应力(极限状态法)或许用应力(许用应力法)。此外,视结构件受力的具体情况,还应进行 5.3.1.2〜5.3∙1.5的强度验算。
5.3.1.2 复合应力
当结构件的同一验算点上受有两个方向的较大正应力打、4及较大的剪应力r时,还应按式(28) 验算复合应力。
J死 + ♦; — ', JV + 3.2 ≤ Iimσ ........................( 28 )
式中:
打、冬一结构件同一验算点上两个垂直方向的正应力,带各自的正负号,单位为牛顿每平方毫米
(N/mm2);
r —结构件同一验算点上的剪应力,单位为牛顿每平方毫米(N/mm2);
Iimb——见表270
5.3.1.3普通螺栓连接的结构件
普通螺栓连接的轴心受拉(压)结构件的强度按式(29)验算。
γ N
—≤ Iimb ........................( 29 )
式中:
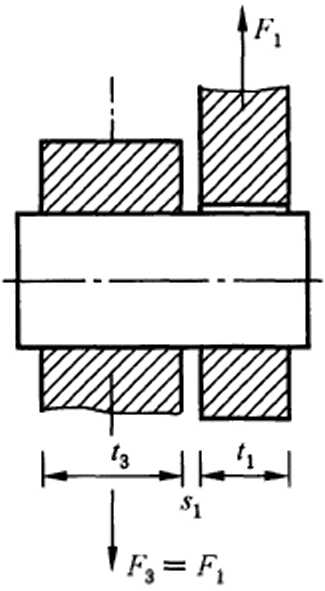
AJ——所验算截面的净面积,单位为平方毫米(mm2),见图13;
N —作用于连接处的轴向力,单位为牛顿(N);
L 考虑开孔对结构件应力的影响系数,取/, = 1.2;
limσ——见表27o
R e.
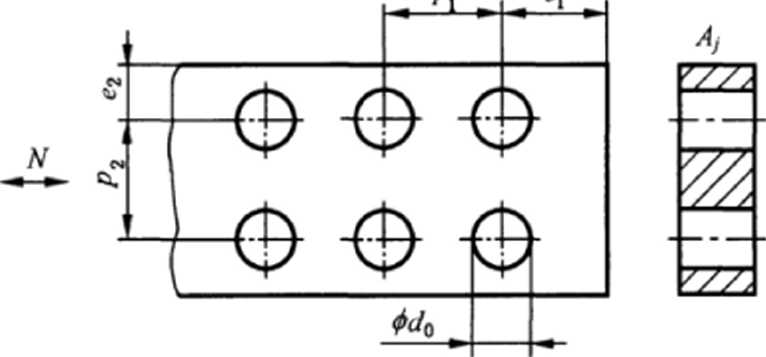
图13螺栓连接接头
5.3.1.4摩擦型高强度螺栓连接的结构件
髙强度螺栓连接的轴心受拉(压)结构件的强度按式(30)验算。
N'
—≤ limσ ........................( 30 )
Aj
式中:
AZ —所验算截面的净面积,单位为平方毫米(mn√);
Iimb——见表27;
N' —作用于连接处的计算轴向力,单位为牛顿(N),按式(31)计算。
N' =N(I-0.5 ........................( 31 )
式中:
N —作用于连接处的轴向力,单位为牛顿(N);
〃—一结构件一端或对称连接一边的高强度螺栓数,见图14;
所验算截面处(连接接头的最外列螺栓处)的高强度螺栓数,见图14。
λ=1O, ∏ι=5
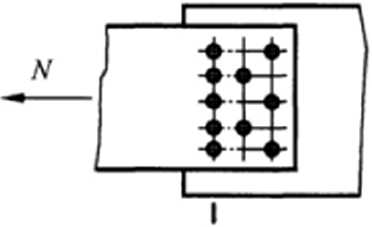
图14高强度螺栓连接
5.3.1.5销轴连接的结构件
5.3.1.5.1 通则
本标准中的销轴连接验算,适用于符合下列条件的销轴连接:
——销轴为圆形;
—不约束被连接件之间转动;
——承受载荷的销轴连接,即不适用于只作为附属便利工具的销轴连接;
—销轴和孔之间的配合公差符合GB/T 1800.2-2009的hl3∕H13或更紧密;在承受变向载荷 时,应采用紧密的配合公差;
——所有销轴均有防止其脱出销轴孔的防脱装置;
——当预定允许销轴连接在承载的情况下转动时,防脱装置应能限制销轴的轴向位移;
—被连接件的刚度应能限制其平面外(岀平面)的局部变形(表面凹陷)。
5.3.1.5.2抗剪承载能力
销轴连接的轴心受拉结构件按式(32)验算其抗剪承载能力。
N
9,r . > /9. ≤ Hmr ........................( 32 )
Lt (C + α0∕2)
式中:
N ——作用于连接处的轴向力,单位为牛顿(N);
b、c、t --几何尺寸,单位为毫米(mm),见图15,要求c≥6;
d0 —销孔直径,单位为毫米(mm),见图15;
IimT ---见表 27。
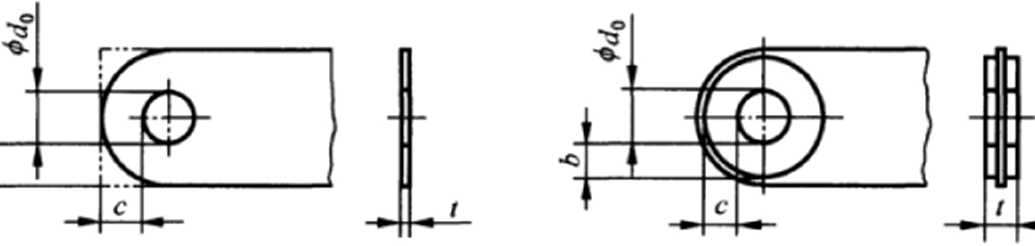
图15销轴连接接头
5.3.1.5.3抗拉承载能力
销轴连接的轴心受拉结构件应按式(33)验算其抗拉承载能力:
γ N
≤ Iirnσ ........................( 33 )
2tbt,
式中:
N——作用于连接处的轴向力,单位为牛顿(N);
bf ——尺寸,取(2r + 16 mm)和6两者中的小值,6 J为几何尺寸,单位为毫米(mm),见图15;
L ——考虑开孔对结构件应力的影响系数,取Λ = 1.2;
limσ——见表27 o
5.3.2连接的强度验算
5.3.2.1焊缝连接
对接焊缝连接的计算应力按连接中最薄的板厚,计算,当不用引弧板施焊时,焊缝的计算长度为实 际长度减去2丄
对接焊缝受拉(压)力和剪力共同作用时的强度按式(34)验算。
√σ2 +2r2 ≤ ∖imσw ........................( 34 )
式中:
6 —焊缝的拉(压)力应力,单位为牛顿每平方毫米(N∕mm2);
r —焊缝的剪应力,单位为牛顿每平方毫米(N∕mm2);
IimbW---见表 280
角焊缝按照抗剪强度验算,焊缝的有效高度一般取O.7hfg为校小的焊脚尺寸;焊缝的计算长度 取为实际长度减去2hfi当角焊缝受不同方向力作用时,应先求得作用在焊缝上的轴力、剪力、扭矩和 弯矩,分别计算各自产生的剪应力按方向叠加,最后按式(35)验算合成剪应力。
+ ≤ IimrvV ........................( 35 )
式中:
C、弓——同一验算点上两个垂直方向的剪应力,单位为牛顿每平方毫米(N/mm2);
IimrW——见表28β
5.3.2.2螺栓连接
5.3.2.2.1普通螺栓连接
5.3.2.2.1.1 通则
普通螺栓中的C级螺栓连接只能用于使螺栓受拉的连接和临时固定,不应用于承受动载的主要受 力结构;A级和B级螺栓连接可用于承受动载的结构。普通螺栓应根据表29给定的极限设计应力验 算螺杆的拉伸、抗剪承载能力以及螺栓孔的抗挤压承载能力。
5.3.2.2.1.2抗剪承载能力
每个螺栓剪切面的抗剪承载能力按式(36)验算。
F
—≤ Iimr ........................( 36 )
A
式中:
F ―作用于该螺栓螺杆截面的剪力,单位为牛顿(N);
A —螺栓螺杆的截面积,单位为平方毫米(mn√);如果剪切面在光面螺杆的范围内,则A为按 光面螺杆直径计算的截面积;如果剪切面在螺杆螺纹范围内,则A为按螺纹螺杆的有效 直径计算的有效面积(螺栓有效计算面积);
Iimr---见表 29o
5.3.2.2.1.3抗挤压承载能力
每个螺栓挤压面的抗挤压承载能力按式(37)验算。
(ZXF
ɪ- ≤ limσr ........................( 37 )
d Xt f
式中:
F ―-作用于该螺栓的剪力,单位为牛顿(N);
d —-螺栓公称直径,单位为毫米(mm);
, ——螺栓挤压面厚度(不含有螺纹部分),单位为毫米(mm);
Iimσ,----见表 29 ;
α ——系数,取为(3&/七)、(久/6)和1.0三者之中的较大值,其中:
W ——螺栓连接中结构件的抗拉强度,单位为牛顿每平方毫米(N∕mm2);
GM ——螺栓材料的抗拉强度,见表30;
dQ ——螺栓孔直径,单位为毫米(mm),见图13;
C ——儿何尺寸,单位为毫米(mm),见图130
图13所示的几何尺寸C、。2和do应同时满足式(38) O
e∣ ≥ ZdQ 9e2 ≥ 1.5J0 <P∖ ≥ 3J0 ♦/>2 ≥ 3J0 ........................( 38 )
5.3.2.2.1.4抗拉承载能力
普通螺栓用于拉力连接,分为允许连接接合面分离和不允许连接接合面分离两种情况进行验算:
——如果不允许连接的接合面分离,则螺栓应施加预紧力,并按5.3.2.2.2.3的高强螺栓承受拉力的 相关规定进行验算;
— 如果允许连接接合面分离,则每个螺栓抗拉承载能力按式(39)验算。
γ-^ ≤ Iimy ........................( 39 )
AI
式中:
F ——作用于该螺栓的拉力,单位为牛顿(N);
A/ ——螺栓有效计算面积,单位为平方毫米(mπ√);
Iim/——见表29o
5.3.2.2.2高强度螺栓连接
5.3.2.2.2.1 通则
高强度螺栓连接可以承受剪力、拉力、力矩和组合载荷。
5.3.2.2.2.2 承受剪力
高强度螺栓连接接头所承受的剪力是通过接头摩擦面之间的摩擦力来传递的,接头所承受的剪力 不应大于所有螺栓极限承载能力之和,单个螺栓的极限承载能力按式(40)计算。
l.疗 μF∖Zi
(40 )
hmFn =----
Yfym
式中:
IimF,,--单个高强度螺栓的极限承载能力,单位为牛顿(N);
卩
F.
Z, 儿 ym
——抗滑移系数,按表31选取;
——单个高强度螺栓的预紧力,单位为牛顿(N),按表32确定;
—一接头摩擦面数;
—一连接孔形影响系数,按表33确定;
——抗力系数,取为1.1。
表31抗滑移系数“值
|
连接处接合面的处理方法 |
构件材料钢号 | |
|
Q235 |
Q345及其以上 | |
|
喷砂或喷砂后生赤锈 |
0.45 |
0.50 |
|
喷砂(酸洗)后涂无机富锌漆 |
0.35 |
0.40 |
|
钢丝刷清浮锈或未经处理的干净轧制表面 |
0.30 |
0.35 |
表32单个高强度螺栓的预紧力Fl值
|
性能等级 |
抗拉强度4 N∕mm2 |
屈服点C N∕mm2 |
预紧力Fl kN | |||||||||
|
M16 |
M18 |
M20 |
M22 |
M24 |
M27 |
M30 |
M33 |
M36 |
M39 | |||
|
8.8 |
≥800 |
≥64O |
70 |
86 |
110 |
135 |
158 |
205 |
250 |
310 |
366 |
437 |
|
10.9 |
≥1 000 |
≥900 |
99 |
120 |
155 |
190 |
223 |
290 |
354 |
437 |
515 |
615 |
|
12.9 |
≥1 200 |
>1 080 |
119 |
145 |
185 |
229 |
267 |
347 |
424 |
525 |
618 |
738 |
|
螺栓有效计算面积A, mm2 |
157 |
192 |
245 |
303 |
353 |
459 |
561 |
694 |
817 |
976 | ||
注:表中预紧力值按O∙7%A,计算.其中皿取各挡中的最小值。
表33高强度螺栓连接孔形影响系数匕
|
摩擦面岀现滑移的影响 |
螺栓连接通孔类型 | |||
|
精或中等装配" |
粗装配b或较短长孔C |
短长孔d或长孔C |
长孔' | |
|
严重 |
1.14 |
1.34 |
1.63 |
2.00 |
|
不严重 |
1.00 |
1.14 |
1.41 |
1.63 |
|
*精装配或中等装配圆通孔.按GB/T 5277确定。 b粗装配圆通孔.按GB/T 5277确定。 C长孔,且长度V1.25d,受力方向垂直孔长方向混一螺栓公称直径,单位为毫米(mm)。 d长孔,且长度<1.25。,受力方向平行孔长方向。 r长孔,且长度>1.25d,受力方向垂直孔长方向。 '长孔,且长度>l∙25d,受力方向平行孔长方向。____________________________________ | ||||
5∙3∙2∙2.2∙3 承受拉力
高强度螺栓连接承受拉力时,接头接合面之间有分离趋势。接头设计应保证在外拉力作用下,接合 面之间有一定的压紧力,不应出现分离现象,同时要求高强度螺栓不破坏。因此,在轴向受拉的连接中, 单个高强度螺栓在螺杆轴向所能承受的极限拉力IimFv按式(41)计算,并不应大于0.8F∣(F∣为螺栓的 预紧力,见表32)。
IimFN
O.2(Js∣Λ∣
........................(41 )
式中:
IimFV—单个高强度螺栓在蝶杆轴向所能承受的极限拉力,单位为牛顿(N);
J ——高强度螺栓材料的屈服点,单位为牛顿每平方毫米(N∕mm2),可取为表32中的最
低值;
AZ —髙强度螺栓有效截面积,单位为平方毫米(mm?),可按表32选取;
厶 ——抗力系数,取为1.1;
β ——载荷分配系数,与连接板总厚度L和螺栓直径Q有关,按表34选取;但对图16所示的
连接形式(例如塔身标准节的连接),则一律取3=0.21。
图16连接接头
表34载荷分配系数P值
|
LId |
0.5 |
1.0 |
2.0 |
3.0 |
|
0.472 |
0.443 |
0.386 |
0.332 | |
|
注:L——连接板总厚度,单位为毫米(mm); _____d—螺栓公称直径,单位为毫米(mm)。 | ||||
|
4.0 |
5.0 |
6.0 |
7.0 |
10 |
|
0.306 |
0.280 |
0.254 |
0.228 |
0.150 |
5.3.2.2.2.4 承受力矩
当接头承受与剪切面平行的扭矩时,扭矩不得大于所有螺栓极限承载能力所产生的力矩之和。
当接头受与螺栓轴线方向平行的弯矩时,接头各螺栓所受的拉力不等,此时,受拉力最大的螺栓所 承受的轴向拉力不应大于按式(41)计算的极限拉力IimFN ,并不应大于0∙8F∣。
5.3.2.2.2.5承受剪力、拉力和力矩组合载荷
承受剪力、拉力和力矩组合载荷的高强度螺栓连接接头,各螺栓连接处所受的拉力和剪力不等,单 个螺栓的极限剪切承载能力按式(42)计算,要求式(42)不出现负值,且接头所受剪力不应大于所有螺栓 极限承载能力之和,力矩不应大于所有螺栓极限承载能力所产生的力矩之和。
式中:
IimFZf—单个高强度螺栓的极限剪切承载能力,单位为牛顿(N);
μ ——抗滑移系数,按表31选取;
FI —单个高强度螺栓的预紧力,单位为牛顿(N),按表32确定;
Z, ——接头摩擦面数;
FN ——单个高强度螺栓在螺杆轴向所承受的拉力,单位为牛顿(N),当螺杆轴向力计算得值为
压力时,取FN =0;
—连接孔形影响系数,按表33确定;
ym —抗力系数,取为ι.ιβ
5.3.2.2.2.6承受挤压
承受挤压的高强度螺栓连接不适用于直接承受动力载荷的结构,因此在塔式起重机承重结构中一般不采 用。如果确有需要采用,可按GB 50017等有关标准的规定进行高强度螺栓承压型连接的设计与计算。
5.3.2.3销轴连接
5.3.2.3.1 通则
销轴连接应符合5.3.1.5.1的规定。
销轴连接应根据表29给定的极限设计应力分别验算销轴的抗弯、抗剪承载能力以及销轴孔的抗挤 压承载能力。
5.3.2.3.2抗剪承载能力
销轴抗剪承载能力按式(43)验算。
4F
3A ≤ Iimr
式中:
F —作用于销轴截面的剪力,单位为牛顿(N);
A ——销轴截面积,单位为平方毫米(mm2);
Iimr——见表290 5.3.2.3.3抗挤压承载能力
销轴抗挤压承载能力按式(44)验算。
a × F ..
-:----≤ lιmσf
X z
(43 )
(44 )
式中:
F ——作用于销轴连接的外力,单位为牛顿(N),如图17所示,取F,;
d —销轴直径,单位为毫米(mm);
t ——销轴挤压面厚度,单位为毫米(mm);取h+如和氏中的小值,见图17;
Iim<τf----见表 29;
Q ——系数,取为(σ,∕σ,p和1.0二者之中的较大值;
σ1 ——销轴连接中结构件的屈服点,单位为牛顿每平方毫米(N∕mm2);
销轴材料的屈服点,单位为牛顿每平方毫米(N∕mm2)o
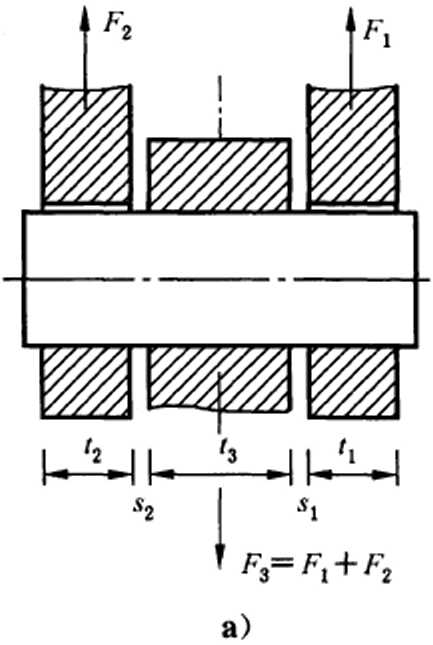
b)
图17销轴连接
5.3.2.3.4抗弯承载能力
销轴抗弯承载能力可按式(45)验算。
Fl (2s ι + t L3 ) 2W
≤ Iimσ,且
F?(2$2 +,1.3) IW
≤ Iimσ,
........................(45 )
式中:
F1 .F2——拉(压)力,单位为牛顿(N),见图17;
W —销轴截面的抗弯模量,单位为三次方毫米(mm3);
f].3 ---n.3 = max(Zι ,Z3),H3为被连接件的厚度,单位为毫米(mm),见图17;
”、S2——被连接件之间的间隙,单位为毫米(mm),见图17;
limσ,——见表29。
5.3.3管件焊接接头
对于由圆形、方形或矩形截面管件组成的格构式结构件中的同平面及多平面焊接接头,除了应按前面 的要求验算各管件母材和连接焊缝的强度外,还应按附录E给出的规则验算接头本身的极限承载能力。
5.4弹性稳定性验算 5.4.1轴心受压构件 5.4.1.1实腹式轴心受压构件稳定性验算
实腹式轴心受压构件按式(46)验算稳定性。
N ≤ Iirnσ ........................( 46 )
式中:
N ——构件的轴向压力,单位为牛顿(N);
A——构件的毛截面面积,单位为平方毫米(mm2);
φ —轴心受压穏定系数(取截面两主轴稳定系数较小者),根据构件的最大长细比人或假想长细
比人F(A和*见5.4.1.4)和截面类型(见表35)按附录H的表H.1〜表H.4选取。
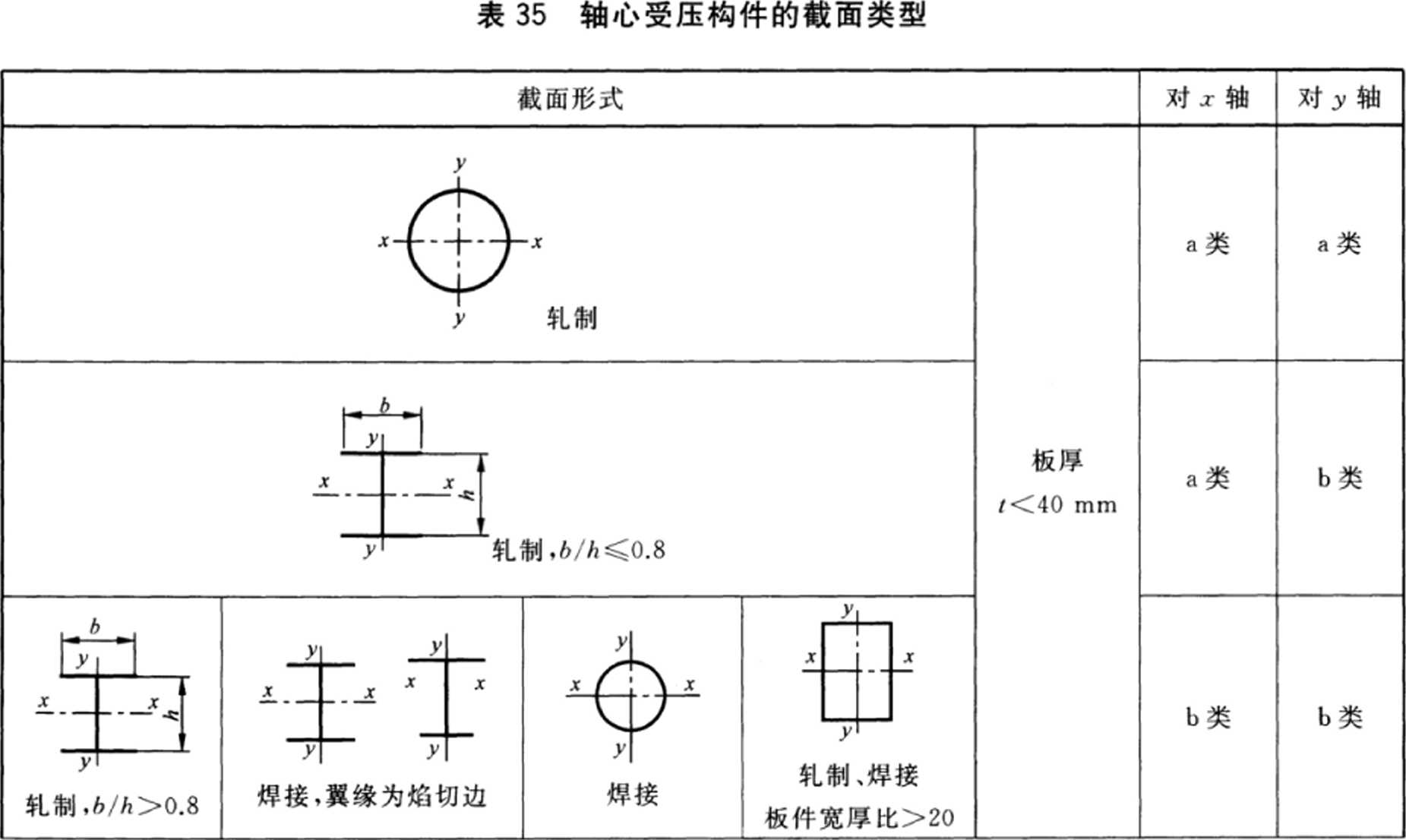
表35 (续)
5.4.1.2角钢轴心受压构件稳定性验算
单面连接的单角钢受压构件一般都是偏心受载,其稳定性应按压弯构件验算。若按轴心受压构件 的验算式(46)进行验算,则其极限设计应力应乘以下列折减系数予以降低:
a) 等边角钢为:0.6 + 0.001 5、但不大于1.0;
b) 短边相连的不等边角钢为:0.5+0.002 5义,但不大于1.0;
C)长边相连的不等边角钢为:0.7。
对于中间无联系的单角钢构件,其长细比义应按最小回转半径计算;对于中间有联系的单角钢构 件,其长细比人应按平行于联系边的形心轴计算;当λ<20时,取人= 20。
5.4.1.3格构式构件轴心受压稳定性验算
格构式轴心受压构件的整体稳定性仍按式(46)验算,但要用换算长细比如或假想换算长细比如F 选取轴心受压构件的稳定系数S島按G.2确定,摭F按5.4.1.4.2计算和应用。
5.4.1.4构件的长细比
5.4.1.4.1实腹式构件的长细比义有义八七之分,按式(47)计算。
λx = — 9 λ v = — ........................( 47 )
rx ry
式中:
Mdy —构件对通过形心的强轴&轴)或弱轴3轴)的长细比;
It —构件的计算长度,单位为毫米(mm),按G.1确定;
广八七一一构件毛截面对通过形心的强轴(Z轴)或弱轴3轴)的回转半径,单位为毫米(mm),按 式(48)计算。
J=TF ........................(48)
式中:
hJy——构件对通过形心的强轴&轴)或弱轴3轴)的毛截面惯性矩,单位为四次方毫米 (mm4);
A ---同式(46)o
5.4.1.4.2对于材料屈服点久大于235 N∕mm2的轴心受压构件,计算其稳定时,实腹式构件需要用假 想长细比"代替长细比 >格构式构件需要用假想换算长细比九F代替换算长细比摭。假想长细比人F 假想换算长细比人"'分别按式(49)和式(50)计算。
对实腹式构件: Af=Aλ∕⅛ ........................( 49 )
V Z√ ð ɔ
对格构式构件: MF =AA λ∕⅛ ........................( 50 )
V乙5 D
式中:
Af ——实腹式构件的假想长细比;
λ —实腹式构件的长细比,见5.4.1.4.1;
足F —格构式构件的假想换算长细比;
Aa ——格构式构件的换算长细比,按G.2确定;
σ, ——构件材料的屈服点,单位为牛顿每平方毫米(N∕mm2);当材料的屈服点?与抗拉强度力 的比值大于0.7时,式中久用0.5σ,÷0.35σA代替。
5.4.1.5轴心受压构件横截面的剪力
轴心受压构件横截面的剪力Q用式(51)求得。
Q N
85φzV 235
(51 )
式中:
Q ——轴心受压构件横截面的剪力,单位为牛顿(N);
N、(P——同式(46)o
格构式轴心受压构件的剪力由腹杆承受。
5.4.2双向或单向压弯构件 5.4.2.1双向或单向压弯构件稳定性验算 5.4.2JJ 双向压弯构件的整体稳定性计算的简便的方法
当N/Ne,和N∕N%均小于0.1时,双向压弯构件的整体稳定性按式(52)验算(可取多个危险截面 分别进行验算)。
⅛ + + ........................(52)
式中:
N、A、平---同式(46);
M^My ——构件计算截面上对强轴(Z轴)和对弱轴3轴)的弯矩,单位为牛顿毫米(N・mm); W.r、Wy —构件计算截面对强轴&轴)和对弱轴3轴)的抗弯模量,单位为三次方毫米(mm3); Iima ---见表 27;
N&、NEy——分别为构件对强轴(]轴)和对弱轴(丁轴)的名义欧拉临界力,单位为牛顿(N),按式 (53)计算。
N…牛,N应EA ʌɪ
(53 )
式中:
E —钢材的弹性模量,E = 2.06×105N∕mm2;
A ---同式(46);
义八七一构件对通过形心的强轴α轴)或弱轴3轴)的长细比,对于实腹式构件按5.4.1.4.1确 定,对格构式构件替换为按G.2确定的换算长细比O
当N/N&和N/Ne,均大于0.1时,双向压弯构件的整体稳定性按式(54)验算(可取多个危险截面 分别进行验算)。
N ψφA
+(TK
1 ∖M
(54 )
式中:
Ψφ ——轴心受压稳定系数φ和其修正系数族的乘积,有代叼和灼四之分,取其中的小值;
φ —同式(46)轴心受压稳定系数;
Ψ —轴心受压稳定系数的修正系数,有对Z轴的叼和对了轴的文,之分,按式(55)计算; 式中的其他符号同式(52)0
NEr-N
ʃ NEl -a[jA(l-q) + N] NELN
(55 )
ψy =NEy—灼[jA(l一 灼)+ N]
式中:
σ.——构件材料的屈服点,单位为牛顿每平方毫米(N∕mm2);当材料的屈服点久与抗拉强度“的 比值大于O∙7时,式中。,用0.5σi+0.35σA代替;
式中其他符号同式(52)和式(54)0
5.4.2.1.2压弯构件的整体弯扭屈曲稳定性计算
压弯构件的整体弯扭屈曲稳定性按式(56)计算。
N / 1 ∖ M
-T-T + ( ---VrTKi~) -^≤ ∙imσ ........................( 56 )
ψφA M — N/Nex / φhWτ
式中:
φA —构件侧向屈曲稳定系数,见附录I;
式中其他符号同式(52)和式(54)0
5.4.2.1.3压弯构件稳定性验算的其他方法
当对压弯构件稳定性验算有更高的要求时,可参考附录J的方法,或参考国内外相关标准,或釆用 成熟的非线性分析方法。
5.4.2.2受弯构件的侧向屈曲稳定性
5.4.2.2.1凡符合下列情况之一的受弯构件,可不验算其侧向屈曲稳定性:
a) 有刚性较强的走台和铺板与受弯构件的受压翼缘牢固相连,能阻止受压翼缘侧向位移时;
b) 箱形截面受弯构件的截面高度人与两腹板外侧之间的翼缘板宽度D的比值∕ι∕6≤3时,或构件 截面足以保证其侧向刚性(如为空间桁架)时;
C)两端简支且端部支承不能扭转的等截面轧制H型钢或焊接工字型截面的受弯构件,其受压翼 缘的侧向支承间距1(无侧向支承点者,则为构件的跨距)与其受压翼缘的宽度b之比值满足 以下条件:
• 无侧向支承且荷载作用在受压翼缘上,〃石7;
• 无侧向支承且荷载作用在受拉翼缘上,〃 石7;
• 跨中受压翼缘有侧向支承时,/∕6≤16√2357^7o
5.4.2.2.2不属于5.4.2.2.1情况的受弯构件的整体稳定性按下列方法验算:
a) 在最大刚度平面内受弯的构件按式(57)验算。
—ɪ ≤ limσ ........................( 57 )
物W;
式中:
MX ——绕构件强轴α轴)作用的最大弯矩,单位为牛顿毫米(N・mm);
Wl ——按受压最大纤维确定的毛截面抗弯模量,单位为三次方毫米(mm3);
% —绕构件强轴弯曲所确定的受弯构件侧向屈曲稳定系数,按附录I确定;
Iimb ---见表 27o
b) 在两个互相垂直的平面内都受弯的轧制H型钢或焊接工字形截面构件按式(58)验算。
MX MV 1.
—ɪ + πr ≤ limσ ........................( 58 )
S, Wr Wy
式中:
Mx .My—构件计算截面上对强轴&轴)和对弱轴3轴)的弯矩,单位为牛顿毫米(N・mm); —构件计算截面对强轴α轴)和对弱轴3轴)的抗弯模量,单位为三次方毫米(mm3);
式中其他符号同式(57)o
5.5疲劳强度验算
5.5.1通则
结构构件及其连接的抗疲劳能力(疲劳极限强度),取决于构件的工作级别、材料种类、应力变化情 况及构件连接的应力集中等级等。
结构疲劳强度的计算常用应力比法和应力幅法。本标准采用应力比法。
5.5.2构件(或连接)的最大应力
构件(或连接)中的最大应力匕EXqm“、是按4.4.5的载荷组合A中最不利工况确定的,其 分别为在疲劳计算点上的各个应力循环中,沿轴线方向的绝对值最大计算正应力和轴线形成 的平面上绝对值最大计算剪应力。
5.5.3应力循环特性
构件(或连接)单独或同时承受正应力(。八C)和剪应力(Cy)作用时,应力循环特性值〃(广八厂八 厂〃)按式(59)计算。
r r = ^Jt min /λ max
y* y ―― (5 y fnjn I^y max > ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙( 59 )
〃.ry ~^~ ^Jry min Ixy max ,
式中:
r(rx.rv ) —应力循环特性值;
.vgXjrymX——在构件(或连接)疲劳计算点上的绝对值最大的正应力和绝对值最大的剪应 力,单位为牛顿每平方毫米(N∕mm2);
JmmgVmm、Cgn --应力循环中与^maX^ymaX . rʃVfnaX相对应的同一疲劳计算点上的一组应力
值,其与最大应力值(均各带正负号)之差的绝对值为最大,单位为牛顿每平 方毫米(N∕mm2);其也应按载荷组合A加以确定,但载荷大小、位置、方向 和组合工况应根据塔式起重机的各种可能作业循环确定。
计算应力循环特性,(包括仁、仁、仁,)时,最小应力和最大应力应带各自正负号,拉应力为正号,压 应力为负号;剪应力按变化约定。移动小车轮压产生的脉动局部压应力,其r值为0。
5.5.4构件连接的应力集中情况等级
塔式起重机的构件连接和接头对结构件的疲劳起着很大的影响。按应力集中情况,对非焊接件分 为W0 .W1 .W2三个应力集中情况等级,对焊接件分为Ko、K|、K2、K.,、K,五个应力集中情况等级,每个 应力集中情况等级中又有一种或多种不同的构件接头连接型式,见附录Ko随着连接应力集中情况等 级的递增,结构疲劳强度递减。应尽量采用较为合理的应力集中情况等级,推荐采用K?,尽量避免采 用Kto
5.5.5结构件的工作级别
结构件的工作级别见4.2.4.3o通常工作级别为E4级(含)以上的结构件宜校核疲劳强度。
5.5.6疲劳强度
构件疲劳强度按表36列出的公式计算,连接件的疲劳强度按表37计算。表中r为应力循环特性, 其值按5.5.3决定。(TT为拉伸和压缩疲劳强度的基本值(见表38),是r = -l的对称应力循环试验中 得到的试验疲劳极限(有90%的可靠度)除以1.34抗力系数(见表39),并考虑构件工作级别及具体的 构件连接类别两个因素后的疲劳强度值。
表36构件疲劳强度
|
应力循环特性 |
疲劳强度计算公式・ |
备注 | |
|
r≤0 |
拉伸, |
5 σ" =Fξ27^1 |
ɪ方向的为。E y方向的为ayrt |
|
压缩C |
2 = \ 0 - ɪ 1 — F |
ɪ方向的为 7方向的为咔 | |
|
r>0 |
拉伸f |
1.67σ-ι 1~(1^⅛⅛)r |
同上 |
|
压缩C |
σn≈∖.2<Jr, |
同上 | |
|
—l≤r≤l |
剪切(构件) |
r =- 少√3 |
根据剪切r值计算相 应于Wo的αrr |
|
剪切(焊缝) | |||
*计算岀的。”不应大于0.75σ6 ,α.不应大于0.9σA ,r.不应大于0.75σft∕√3.若超过时,则疲劳强度取为前述相 应的限值。J为被连接构件材料的抗拉强度,Q235材料的%, =370 N∕mm2 ,Q345材料的” =490 N∕mn√。
表37连接件的疲劳强度
|
连接类型 |
疲劳强度计算公式 |
说明 | |
|
焊缝 |
拉伸压缩 |
同构件疲劳强度计算公式 |
■ |
|
剪切 |
r • = 土 'yr √2 |
本行的C是根据焊缝剪切的r 值计算的相应于K。的值 | |
|
A、B级螺栓连接 |
拉伸压缩 |
不必进行疲劳验算 |
尽鼠避免螺栓在拉伸下工作 |
|
单如 |
C* =0.6σrt ,但不应大于O.45σft |
本行的不是根据螺栓剪切的尸 值计算的相应于W?的值 | |
|
多剪・ |
“”=0.8土,但不应大于0.6" | ||
|
承压 |
(JCr= 2.5 T^r |
5为螺栓的剪切疲劳强度 | |
•计算岀的不应大于0.75"∕√f,否则取其为0.75%∕√f°队为连接件材料的抗拉强度。
表38拉伸和压缩疲劳强度的基本值"τ(抗力系数为1.34时)
单位为牛顿每平方臺米
|
构件 工作级别 |
非焊接件构件连接类别 |
焊接件构件连接类别 | |||||||||
|
Wo |
Wl |
W2 |
KO |
KI |
K2 |
K3 |
Kl | ||||
|
Q235 |
Q345 |
Q235 |
Q345 |
Q235 |
Q345 |
Q235 或 Q345 | |||||
|
EI |
249.1 |
298.0 |
211.7 |
253.3 |
174.4 |
208.6 |
[316.9] |
[323.1] |
271.4 |
193.9 |
116 |
|
E2 |
224.4 |
261.7 |
190.7 |
222.4 |
157.1 |
183.2 |
[293.8] |
262.3 |
220.3 |
157.4 |
94.4 |
|
E3 |
202.2 |
229.8 |
171.8 |
195.3 |
141.5 |
160.8 |
238.4 |
212.9 |
178.8 |
127.7 |
76.6 |
|
E4 |
182.1 |
201.8 |
154.8 |
171.5 |
127.5 |
141.2 |
193.5 |
172.3 |
145.1 |
103.7 |
62.2 |
|
E5 |
164.1 |
177.2 |
139.5 |
150.6 |
124.2 |
124.0 |
157.1 |
140.3 |
117.8 |
84.2 |
50.5 |
|
E6 |
147.8 |
155.6 |
125.7 |
132.3 |
103.5 |
108.9 |
127.6 |
113.6 |
95.6 |
68.3 |
41.0 |
|
E7 |
133.2 |
136.6 |
113.2 |
116.2 |
93.2 |
95.7 |
103.5 |
92 |
77.6 |
55.4 |
33.3 |
|
E8 |
120.0 |
120.0 |
102.0 |
102.0 |
84.0 |
84.0 |
84.0 |
75.0 |
63.0 |
45.0 |
27.0 |
注1:括号[]内的数值为大于0∙75倍的Q235抗拉强度。„的理论计算值,仅应用于式(63)所用的匕,和 的值。
注2:抗力系数为1.28时,表中值需乘以LO5,抗力系数为1.16或1.0时,表中值需乘以1.16或1.34β抗力系数 见表39。
表39疲劳强度用抗力系数7刁
|
易接近性 |
失效-安全构件 |
非失效-安全构件 | |
|
对人员无危险 |
对人员有危险 | ||
|
易接近的接头细部 |
1.0 |
1.16 |
1.28 |
|
不易接近的接头细部 |
1.16 |
1.28 |
1.34 |
|
注:失效-安全构件是指那些失效后果较小的构件,例如某个件的局部失效不会导致整个结构失效或载荷坠落。 非失效-安全构件是指一个件的局部失效会立即导致结构失效或载荷坠落。 | |||
5.5.7疲劳强度验算
根据载荷组合A(见4.4.5)的实际可能最不利工况计算得出的绝对值最大的应力,按式(60)〜 式(63)进行验算。
I bβrmnx I <

Xrt
XrC
........................(60 )
I I / IiJyrl
I ^ymaX |
I Cymax I ^Xyr
........................(61 )
........................(62 )
≤ 1.1
........................(63 )
式中:
^Jr m«x、b» max、Jey max 同式(θ9 );
Jrl —与匕g相应的拉伸疲劳强度,单位为牛顿每平方毫米(N∕mm2);
j ——与CgX相应的压缩疲劳强度,单位为牛顿每平方毫米(N∕mm2);
J” ——与。5心相应的拉伸疲劳强度,单位为牛顿每平方毫米(N∕mm2);
小 ——与。5“相应的压缩疲劳强度,单位为牛顿每平方毫米(N∕mπ√);
Cw —与rr,mflx相应的剪切疲劳强度,单位为牛顿每平方毫米(N∕mm2);
匕, ——与。5“相应的拉伸或压缩疲劳强度,单位为牛顿每平方毫米(N∕mm2);
σyr ——与byg相应的拉伸或压缩疲劳强度,单位为牛顿每平方毫米(N∕mm2)0
在式(60)〜式(63)中:σrmnxxσvmaxxr^ rnnx按5.5.2计算;打”、。EgE和C*各式中符号的下角 标Tryyr Tyr分别为Or Sv、Cy的应力循环特性,按5.5.3计算。
当fgχS,g∖C,gX三种应力中某一个最大应力在任何应力循环中均显著大于其他两个最大应力 时,可以只用这一个最大应力校核疲劳强度,另两个最大应力可忽略不计。
通常塔式起重机结构件(或连接)在同一工况下进行疲劳强度校核。但为确保安全和计算简便,也 可将同一工况或不同工况的JgCygX组合在一起,用按最不利的r值计算的疲劳强度。E、 <∑E .σyrt Sg和c.vr来进行校核。
式(63)左侧第三项分子中的fgX和JE应带各自的正负号,分母中的。〃和%则是相应的疲劳 强度。
从表39中的可见,当工作级别El-E3所对应的构件或连接的应力集中情况等级Wo ʌ W1 . W2、K°、K、K2中的。一|值大于构件静强度的极限设计值limσ时,可以不必进行疲劳强度核算。若 J 值小于静强度极限设计值Iimg但计算出的匕大于静强度极限设计值limσ时,则该构件或连接也不必 进行单项疲劳强度核算。
5.6刚性要求
5.6.1构件的刚性
构件的刚性应满足式(64)o
λ ≤ limλ,即 A ≤ IimA Q,λy ≤ IimA ........................( 64 )
式中:
λ ——构件的长细比,见5.4.1.4;
hdy——构件对通过形心的强轴(1轴)或弱轴3轴)的长细比,见5.4.1.4;
Hmλ —构件的控制长细比,见表40。
注:对受拉构件,其长细比仍按5.4.1.4给出的公式计算,但构件的计算长度取其实际长度。如有可靠装置或措施使 受拉构件在拆装及运输过程中得以妥善保护.则其可不受式(64)的限制。
表40构件的控制长细比IinU
|
构件名称 |
受拉构件 |
受压构件 | |
|
主要承载构件 |
桁架的弦杆 |
180 |
150 |
|
整个结构 |
200 |
180 | |
|
次要承载构件(如主桁架的其他杆、辅助桁架的弦朴等) |
250 |
200 | |
|
其他结构件 |
350 |
300 | |
5.6.2静态刚性
塔式起重机的静态刚性,以规定的载荷作用于指定位置时产生弹性变形的结构在某一位置处的静 位移值来表征。
塔身处于独立状态的塔式起重机,在额定起升载荷作用下,起重臂根部连接处的水平静位移推荐不 大于l∙34∕√100,其中h为起重臂根部连接处至直接支撑整个塔身的平面的垂直距离。前述的水平静 位移△,可按式(65)计算。
△ r = --- Δm ........................( 65 )
1 一 —
NE
式中:
—起重臂根部连接处的水平静位移,单位为毫米(mm);
N ——塔身与臂架连接处以上塔身顶部所有垂直力(包括塔身自重在此处的折算力,参见附录
F)的合力,且所有∕z.∕w和厶系数的值全部取1,单位为牛顿(N);
NE——欧拉临界载荷N丄和NE,中的较小者,N宀和NEy按式(66)计算,单位为牛顿(N);
△ m —塔身中心线处的弯矩M引起的起重臂根部连接处的水平位移,单位为毫米(mm)O
NEr
π2E∕x (μlμ2h)2
........................(66 )
π2Ely (μiμ2h)2
式中:
用/2——构件的计算长度系数,见附录G;
E ——钢材的弹性模量,E = 2.06×105N∕mm2;
hJy—构件对通过形心的强轴Cr轴)或弱轴3轴)的毛截面惯性矩,单位为四次方毫米(mm4);
h —起重臂根部连接处至直接支撑整个塔身的平面的垂直距离,单位为毫米(mm)O
5.6.3动态刚性
塔式起重机的动态刚性,以满载情况下吊重处于最低位置时系统的最低阶固有频率(简称为满载自 振频率)来表征。
塔式起重机一般不验算动态刚性。当用户或设计本身对此有特殊要求时,可进行验算。
5.7构造要求
5.7.1 一般原则
5.7.1.1结构杆件重心线应尽量与结构几何图形中心线相重合,连接焊缝和螺栓组重心线应尽量与杆 件重心线相重合。
5.7.1.2主要承载结构的构造设计应力求简单、受力明确,传力直接,尽量降低应力集中的影响。
5.7.1.3结构(或结构件)的设计应考虑到制造、检查、运输、安装(拆卸)、使用和维护等的方便和可能 性。露天工作的塔式起重机结构应避免积水。
5.7.1.4对于动载荷比较严重和受力复杂的焊接结构件,除非采取措施减小或消除焊接内应力,否则选 用的钢材厚度,对碳素钢不宜大于50 mm,对低合金钢不宜大于35 mmo
5.7.1.5应根据塔式起重机的实际工作环境考虑腐蚀对结构的影响,主要承载结构的钢板和型钢的最 小厚度不应小于表41的规定。
表41钢板和型钢的最小厚度
单位为毫米
|
腐蚀环境 |
开口截面 |
闭口截面 |
|
微弱- |
3 |
2.5 |
|
中等 |
5 |
4 |
|
严重 |
6 |
6 |
|
*采用该行所列的薄板时,结构外露表面需有可靠的防锈涂漆。 | ||
5.7.1.6主要承载结构件在不同连接处允许采用不同的连接方式来传递载荷,但同一连接处不宜混合 使用不同的连接方式。
5.7.1.7对于需要在使用现场作整段拼接的大型结构,宜优先考虑采用高强度螺栓连接。
5.7.1.8焊接梁的横向加劲肋与翼缘板相接处应切角,当切成斜角时,其宽约5/3(但不大于40 mm), 高约。/2(但不大于60 mm),其中。为加劲肋的宽度,见图18o
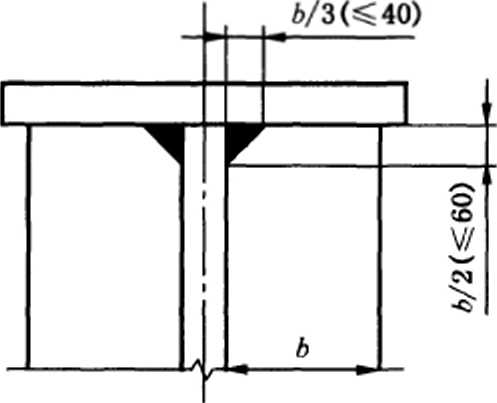
图18焊接梁的横向加劲肋与翼缘板相接处的切角
5.7.1.9桁架节点板厚度一般根据所连接杆件内力的大小确定,但不应小于5 mmO
5.7.2焊接连接
5.7.2.1对接焊接
对接焊接的坡口形式,应符合GB/T 985.1、GB ∕T 985.2o
主要承载结构中不等板厚或板宽的对接焊,当焊件的板厚或板宽相差4 mm以上时,应分别在厚度 方向或宽度方向,从一侧或两侧作成不大于1 : 4的过渡斜度(见图19)o
斜度不大于1:4

斜度不大于1:4
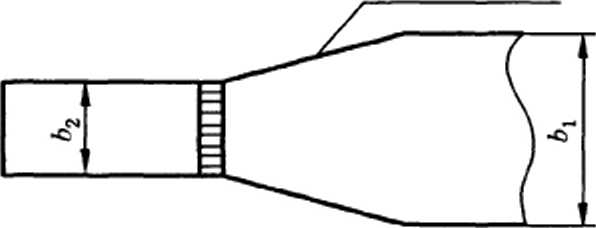
图19不等板厚或板宽对接焊接的过渡
5.7.2.2角焊接
5.7.2.2.1角焊缝焊脚尺寸力"见图20)的最小值应符合表42的规定,且不应小于1.5√Sr,其中8为 较厚焊件的厚度(当采用低氢型碱性焊条施焊时,3可取为较薄焊件的厚度)。但对自动焊,角焊缝焊 脚尺寸的最小值可减小1 mm。当焊件厚度不大于4 mm时,角焊缝焊脚尺寸的最小值应与焊件厚
度相同。
表42角焊缝焊脚尺寸虹的最小值 单位为毫米
|
焊接件较厚件的厚度S |
丄的最小值 |
|
SWlO |
4/6 |
|
10<5≤20 |
6/8 |
|
2O<^≤3O |
8/10 |
|
注:九由的最小值中,分子用于碳素钢,分母用于低合金钢。 | |
5.7.2.2.2角焊缝焊脚尺寸/u也不宜大于较薄焊件厚度的1.2倍(钢管结构除外)。但对于板件边缘的 角焊缝(见图20),应符合下列要求:
—曷(较薄焊件的厚度)不大于6 mm时,Zu不大于曷;
--Sl 大于 6 mm 时比 Sl 小 1 mm~2 mmo
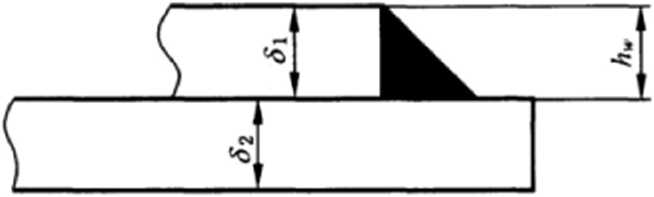
图20角焊缝焊脚尺寸
5.7.2.2.3承受动载荷的主要承载结构,角焊缝的表面应呈凹弧形或直线形。角焊缝焊脚尺寸的比例 (焊缝截面两短边尺寸之比),对正面角焊缝宜为1 : L5(长边顺内力方向),对侧面角焊缝可为1 : IO 5.7.2.2.4侧面或正面角焊缝的长度应使计算长度不小于8人*和40 mm。
5.7.2.2.5侧面角焊缝承受静载荷或间接承受动载荷时的计算长度不宜大于60Aw,承受动载荷时的计 算长度不宜大于40Au,o当焊缝长度大于上述数值时,超过部分在计算中一般不予考虑;但内力沿侧面 角焊缝全长分布时,焊缝的计算长度不受此限。
5.7.3螺栓连接
5.7.3.1每一杆件在节点处或接头一侧的螺栓数不应少于2个。沿受力方向,每行螺栓数不宜多于5个。
5.7.3.2 A、B级螺栓采用钗制孔时,若构件承受脉动载荷,则孔径不应大于d + (0∙2 mm〜0.3 mm),d 为螺栓公称直径;若构件承受交变载荷,则孔和螺栓的配合不应低于Hll∕h9o
5.7.3.3螺栓布置的极限尺寸见表43o
表43螺栓布置的极限尺寸
|
项目 |
位置、边缘尺寸等 |
最大距离 (取两者中较小者) |
最小距离 | |
|
螺栓孔中心间距 (图 13 的 Pl、p2) |
外排 |
84。或 128 |
3d。 | |
|
中间排 |
受压构件 |
12—或 183 | ||
|
受拉构件 |
16do 或 243 | |||
表43 (续)
|
项目 |
位置、边缘尺寸等 |
最大距离 (取两者中较小者) |
最小距离 |
|
螺栓孔中心到被连接件 边缘的距离 |
图13的七 |
4do或財 |
2dti |
|
图13的c |
1.5c∕0 | ||
|
注:d.——螺栓孔直径,单位为毫米(mm); 8——较薄被连接件的厚度,单位为毫米(mm)O | |||
5.7.4走台、梯子、栏杆和司机室
走台、梯子、栏杆和司机室应符合GB/T 24818.3.GB/T 20303.3的要求。
6机构
6.1起升机构
6.1.1电动机初选
6.1.1.1电动机的型式
电动机型式可按Ul选择。
6.1.1.2电动机的初选功率
6.1.1.2.1电动机的稳态起升功率PN按式(Ll)计算。
6.1.1.2.2对YZR系列等能提供有关按CZ值计算选择电动机资料的异步电动机,其所需电动机的功 率按式(L.6)计算。
6.1.1.2.3对未能提供按CZ值计算选择电动机的资料,但已知起升机构工作级别的,其所需电动机的 功率按L.2.4计算。
6.1.1.2.4对能获得负荷图(见图L・l)的起升机构,其所需电动机的功率按式(L.9)计算。
6.1.1.2.5对下述起升机构,选择其电动机功率时,还应考虑:
a) 由两套相同的独立起升机构并联,共同驱动一个起升载荷,如果有能适时监控两套起升机构的 载荷和速度相同的措施,每套起升机构电动机功率宜不小于总计算功率的55%;
b) 由两台电动机共同驱动一个起升卷筒,两台电动机之间刚性连接,每台电动机的功率宜不小 于总计算功率的55%;采用行星差动减速器双电动机驱动时,每台电动机的功率宜不小于总 计算功率的50%;
C)对于起升行程大、起升速度慢或特殊用途的慢速塔式起重机,如其在一个工作循环中起升机构 运转时间超过10 min,其电动机功率应按下列短时工作制S2选择:
1) 当一个工作循环中起升机构平均运转时间为10 min〜30 min时,则S2为30 min;
2) 当一个工作循环中起升机构平均运转时间为30 min〜60 min时,则S2为60 minO 注:在选择抓斗塔式起重机起升机构电动机功率时,需考虑GB/T 3811-2008中6.1.1.1.2.5a)的规定。
6.1.1.3电动机轴上所需的转矩
6.1.1.3.1稳态起升总起升载荷的转矩
稳态起升总起升载荷时电动机轴上的转矩MN按式(67)计算。
MN=祟 ........................(67 )
2aιη
式中:
MN——稳态起升总起升载荷的转矩,单位为牛顿米(N・m);
PQ —总起升载荷,即总起重量的重力,包括额定起重量、吊具及部分悬垂的钢丝绳等质量的重 力(参见4.3.2.2.1的注2),并考虑载荷组合A且将所有分项载荷系数心设为1.0,单位为 牛顿(N);
D —按最外层钢丝绳中心计算的卷筒卷绕直径,单位为米(m);
Q ―钢丝绳滑轮组的倍率;
i ——由电动机轴到卷筒轴的总传动比;
η —起升物品时起升机构传动装置和绳轮系统的总效率。
6.1.1.3.2电动机产生转矩的最低要求
为了加速起升总起升载荷或试验载荷,以及为补偿电源电压和频率变化所导致的转矩损失,电动机 轴上转速〃=0时产生的转矩应满足式(68)〜式(70)的最低要求。
a) 对直接起动的笼型异步电动机:
Md ≥ 1.6MN ........................( 68 )
式中:
Md—起动时(转速〃=0时)电动机轴上具有的转矩,单位为牛顿米(N・m);
MW—稳态起升总起升载荷的转矩,单位为牛顿米(N・m)β
b) 对绕线转子异步电动机:
Mj ≥ 1.9MN ........................( 69 )
式中符号同式(68)。
C)对采用变频控制的所有类型的电动机:
Md ≥ 1.4MN ........................( 70 )
式中符号同式(68)0
6.1.2 电动机的校验
6.1.2.1电动机的过载校验和发热校验
电动机过载校验,是验算在设计要求的极限起动条件下,所选电动机的最大转矩或堵转转矩是否能 满足机构起动的需要,校验方法见附录Ne
电动机发热校验,是验算在设计要求的正常运转条件下,电动机不应出现过热,校验方法见附录()。
6.1.2.2电动机使用环境的功率修正
若塔式起重机安装使用地点海拔超过1 000 m或使用环境温度与其额定环境温度不一致时,应对 电动机功率进行修正.见7.5.2.3°
6.1.3制动器的选择
6.1.3.1支持制动
6.1.3.1.1支持制动的作用
在起升机构中,支持制动是用来将起升的物品保持在悬空状态。应由机械式制动器产生支持制动 作用。
6.1.3.1.2支持制动器的选择
起升机构的每一套独立的驱动装置应装设至少一个支持制动器。起升机构制动器的制动距离应满 足塔式起重机使用要求。
支持制动器应是常闭式的,制动轮/盘应装在与传动机构刚性联接的轴上。
支持制动器的制动转矩不应小于按式(71)计算的制动轴上所需的制动转矩M/。
MZ=KZ........................( 71 )
LaI
式中:
MZ——起升机构制动器轴上所需的制动转矩,单位为牛顿米(N・m);
KZ—制动安全系数,见6.1.3.1.3;
η ―物品下降时起升机构传动装置和绳轮系统的总效率;
i —由制动器轴到卷筒轴的总传动比;
式中其他符号同式(67)。
6.1.3.1.3制动安全系数
制动安全系数规定如下:
a) 一般起升机构(通常为M5级及其以下级别)不应低于1.5;
b) 重要起升机构(通常为M6级及其以上级别)不应低于1.75;
C)有液压制动作用的液压传动起升机构不应低于1.25o
6.1.3.2减速制动
除抓斗和其他特殊设计的塔式起重机外,起升机构不应采用无控制的荷重自由下落的下降方式。 减速制动的作用是将悬挂在空中的正在向下运动的物品减速到停止或减速到一个较低的下降速度。
起升机构的减速制动可由机械式支持制动器兼任完成,也可由电气制动来完成。推荐分别设置支 持制动与减速制动。电气制动应只用于减速制动,不应用于支持制动和安全制动。
6.1.3.3安全制动
对于安全性要求特别高的起升机构,为避免因起升机构的支持制动器失效及减少因传动链损坏而 引发的事故,应在传动链末端(钢丝绳卷筒)上装设机械式制动器作安全制动器用。此安全制动器在支 持制动器失效或传动装置损坏导致物品超速下降,下降速度达到1.5倍额定速度(但不超过电动机和传 动链的极限转速)前应自动起作用。
应采取措施来自动控制支持制动器和安全制动器的动作顺序,防止产生不当的冲击载荷。
安全制动器与起升电动机之间应设联锁保护装置,使得在安全制动器撤去制动力矩前,起升机构不 能起动。
6.1.4起动、制动时间和加速度
6.1.4.1起动时间和起动平均加速度
6.1.4.1.1起升机构起动时间七按式(72)计算。
t =_k_______________rLA. ........................( 72 )
L 9.55(Mjg-M.V )
式中:
I(I —起升机构的起动时间,单位为秒(s);
n --电动机额定转速,单位为转每分(r∕min);
k —其他传动件的转动惯量折算到电动机轴上的影响系数∕ = l.O5〜1.2;
Jl —电动机转子的传动惯量,单位为千克二次方米(kg∙ m2)5
J2 —电动机轴上制动轮和联轴器的传动惯量,单位为千克二次方米(kg∙ m2);
J3 —作起升运动的物品的惯量折算到电动机轴上的传动惯屋,单位为千克二次方米
(kg ∙ π√),按式(73)计算;
Mdq—电动机平均起动转矩,单位为牛顿米(N・m),按式(74)计算;
式中其他符号同式(67)。
^3=Γ⅛ ........................(73)
4g宀2
式中:
g——重力加速度,单位为米每二次方秒(m∕s2);
式中其他符号同式(67)、式(72)o
Mdq = ʌAS X Mn ........................( 74 )
式中:
Aas — 电动机平均起动转矩倍数,见表44;
Mn — 电动机的额定转矩,单位为牛顿米(N・m);
式中其他符号同式(72)。
表44电动机平均起动转矩倍数λAS
|
电动机型式 |
人AS | |
|
起重用三相交流绕线式电动机 |
1.5 〜1.8 | |
|
起重用三相笼型电动机 |
普通型式 |
电动机堵转转矩倍数 |
|
变频器控制型式 |
1.5 〜1.8 | |
|
并励直流电动机 |
1.7 〜1.8 | |
|
串励直流电动机 |
1.8-2.0 | |
|
复励直流电动机 |
1.8 〜1.9 | |
6.1.4.1.2起动平均加速度J按式(75)计算;正常情况下起动平均加速度不宜大于0.8 m∕s2 o
式中:
起升机构的起动平均加速度,单位为米每二次方秒(m∕s2);
Pq—起升速度,单位为米每秒(m/s); tq——同式(72)o
6.1.4.2制动时间和制动平均减速度 6.1.4.2.1采用机械式制动器制动的满载下降制动时间、按式(76)计算。
n\_k (Jl +/2)+/37] f \
心=—i顽讯 W) 一 ........................(76)
式中:
tz ——起升机构的制动时间,单位为秒(s);
/ ——满载(额定载荷)下降且制动器投入有效制动转矩时的电动机转速,单位为转每分钟
(r∕min),常取wz = l.Iw ,n为电动机额定转速;
MZ——同式(71);
M;——稳态下降额定载荷时电动机制动轴上的转矩,单位为牛顿米(N・m),按式(77)计算;
式中其他符号同式(67)、式(72)0
M,=
PQD , 2ai η
(77 )
式中:
η——物品下降时起升机构传动装置和绳轮系统的总效率;
式中其他符号同式(67)、式(76)o
6.1.4.2.2制动平均减速度按式(78)计算;除紧急制动外,正常情况下制动平均减速度不宜大于0.8 m∕s2 O
(78 )
式中:
制动平均减速度,单位为米每二次方秒(m∕s2);
满载下降且制动器开始有效制动时的下降速度,单位为米每秒(m/s),可取Vfq=IAV^Vq 为起升速度;
-同式(76)。
6.1.5减速器的选择
6.1.5.1在一般情况下,起升机构减速器的设计预期寿命应与该机构工作级别中所对应的使用等级一 致。但对一些工作特别繁重、允许在塔式起重机使用期限内更换减速器的起升机构,其减速器的设计预 期寿命可小于该起升机构的使用等级。
6.1.5.2采用起重机用减速器时,当所选用的减速器参数表上标注的工作级别与所设计的起升机构的 工作级别不一致时,应引入减速器功率修正系数。
6.1.5.3采用普通用途减速器时,还应用电动机的最大起动转矩验算减速器输入轴的强度,用最大起升 载荷(总起升载荷考虑起升动力系数饥及绳轮系统效率)作用在减速器输出轴上的短暂最大力矩和最 大径向力验算减速器输岀轴的强度。
6.2运行机构
6.2.1稳态运行阻力
6.2.1.1 总则
塔式起重机沿直线轨道运行时,稳态运行阻力P,按式(79)计算。 64
PJ=Pm+ Pu + Pw3 ........................( 79 )
式中:
Pi —稳态运行阻力,单位为牛顿(N);
Pln —运行摩擦阻力,单位为牛顿(N);
Pa ——坡道阻力,单位为牛顿(N);
Pw3——同式(IO)O
当塔式起重机在曲线轨道上运行时,还应考虑弯道运行的附加阻力。
6.2.1.2运行摩擦阻力P”
塔式起重机沿直线运行时,摩擦阻力P,”主要包括车轮踏面的滚动摩擦阻力、车轮轴承的摩擦阻力 以及附加摩擦阻力三部分,按式(80)计算。
式中:
Pm——同式(79);
P∑——运动部分所有质量的重力,包括吊运物品和塔式起重机或小车等质量的重力,单位为牛顿(N); μ ——车轮轴承摩擦阻力系数,见表45;
d --车轮轴径,单位为毫米(mm);
fκ——车轮沿轨道的滚动摩擦力臂,单位为毫米(mm),见表46;
D ——车轮踏面直径,单位为毫米(mm);
Cf——考虑车轮轮缘与轨顶侧面摩擦或牵引供电电缆及集电器摩擦等的附加摩擦阻力系数,一般 取 1.50
表45车轮轴承的摩擦阻力系数〃
|
轴承型式 |
滑动轴承 |
滚动轴承 | |||
|
轴承结构 |
开式 |
稀油润滑 |
滚珠或滚柱式 |
锥形滚子式 |
调心滚子式 |
|
0.1 |
0.08 |
0.015 |
0.02 |
0.004 | |
表46车轮的滚动摩擦力臂单位为毫米
|
车轮材料 |
钢轨型式 |
车轮踏面直径D | |||||
|
100,160 |
200,250,315 |
400,500 |
630,710 |
800 |
900,1 000 | ||
|
钢 |
平顶 |
0.25 |
0.3 |
0.5 |
0.6 |
0.7 |
0.7 |
|
圆顶 |
0.3 |
0.4 |
0.6 |
0.8 |
1.0 |
1.2 | |
|
铸铁 |
平顶 |
■ ■■ |
0.4 |
0.6 |
0.8 |
0.9 |
0.9 |
|
圆顶 |
— |
0.5 |
0.7 |
0.9 |
1.2 |
1.4 | |
6.2.1.3坡道阻力Pa
坡道阻力按式(81)计算。
Pa = (m + mi )gtanα ........................( 81 )
式中:
PU —同式(79);
m ―塔式起重机的总起升质量,单位为千克(kg);
m,--塔式起重机或小车的质量,单位为千克(kg);
g——重力加速度,单位为米每二次方秒(m∕s2);
Q —轨道倾斜的角度,单位为度(°)。当轨道坡度不超过0.5%时取tana =0.005,否则按出现的 实际坡度计算坡道载荷。
6.2.2电动机初选
6.2.2.1电动机型式
电动机型式可按L.1选择。
6.2.2.2电动机的初选功率 6.2.2.2.1电动机稳态运行功率按式(L. 2)计算。
6.2.2.2.2对能提供有关按CZ值计算选择电动机资料的绕线转子异步电动机,可按式(L.6)计算所需 的功率。
6.2.2.2.3对能获得电动机负荷图(见图L.1)的运行机构,可按式(L.9)计算所需电动机功率。
6.2.3电动机的校验 6.2.3.1电动机的过载校验和发热校验
电动机过载校验方法见附录N,发热校验方法见附录()。
6.2.3.2电动机使用环境的功率修正
电动机使用环境的功率修正见7.5.2.30
6.2.4起动时间与起动平均加速度 6.2.4.1满载、上坡、迎风运行起动时的起动时间九按式(82)计算。
”人(J 1 + J 2)刀'+ 等] tq = 9.55(m'Mdq-MG
........................(82 )
式中:
tq ——运行机构的起动时间,单位为秒(s);
m'--电动机台数;
Jk ——作平移运动的全部质量的惯量折算到电动机轴上的转动惯量,单位为千克二次方米 (kg・ π√),按式(83)计算;
η ——运行机构总传动效率;
Mdj——满载、上坡、迎风时作用于电动机轴上的稳态运行阻力矩,单位为牛顿米(N・m),按式 (84)计算;
式中其他符号同式(72)。
3 +叽"
(83 )
4f2
式中:
D—车轮踏面直径,单位为米(m);
i ―由电动机轴到车轮的机构总传动比;
式中其他符号同式(81)、式(82)o
M『省 2ιη
(84 )
式中:
PJ——同式(79);
式中其他符号同式(82)、式(83)o
6.2.4.2起动平均加速度Qy按式(85)计算。无特殊要求时,电动机容量及机构控制系统应使塔式起重 机的平均线加速度在O∙O5 m∕s2〜0.07 m/s?范围内,起重量大者取小值。
........................(85 )
a>=7~
式中:
Qy—起动平均加速度,单位为米每二次方秒(m∕s2);
%—塔式起重机的稳定运行速度,单位为米每秒(m∕s);
ttl——同式(82)o
6.2.5减速器的选择 6.2.5.1在一般情况下,运行机构减速器的设计预期寿命与该机构工作级别中所对应的使用等级一致。 但对一些工作特别繁重、允许在塔式起重机使用期限内更换减速器的运行机构,其减速器的设计预期寿 命可小于运行机构的使用等级。
6.2.5.2釆用起重机用减速器时,当所选用的减速器参数表上标注的工作级别与所设计的运行起升机 构的工作级别不一致时,应引入减速器功率修正系数。
6.2.5.3与起升机构减速器不同,运行机构减速器在工作时承受双向载荷,且在机构起(制)动时要传递 更大的驱动或制动力矩,在选择运行机构的减速器时应特别考虑此因素。
6.2.6制动器的选择
6.2.6.1 通则
运行机构装设制动器的作用一般是为了实现减速制动,并使停止下来的塔式起重机在作业时运行 机构能保持不动。
如采用常闭式制动器,宜先减速后制动。
6.2.6.2制动转矩的验算
运行机构机械式制动器的制动转矩与运行摩擦阻力矩之和,应能使处于满载、顺风及下坡状态下运 行的塔式起重机在要求的时间内停止下来。
运行机构的制动转矩M=按式(86)计算。
Ayf [Pw3 + Pa — P:]D" n r 1 r ∖ I rz η (Qa \
M7 =-------------- +c U- MM(Jl + j2) + J37J ..................( 86 )
Ll y.obG
式中:
M2 ——运行机构制动转矩,单位为牛顿米(N・m);
PW3 —同式(10);
Pa ——同式(79);
P:I —-不考虑轮缘与轨道侧面附加摩擦的摩擦阻力,单位为牛顿米(N・m);
D ---同式(83);
Tr) ----同式(82);
/ ——由制动器轴到车轮的机构总传动比;
〃、h、J ∖、J 2 ----同式(72);
J 3 --同式(82);
ts —运行机构制动时间,单位为秒(s);
/m. ——制动器台数。
6.2.6.3制动器的选择条件
一般[Mz]≥Mz,且应使制动减速度值在0.05 m∕s2-0.07 m/s?的范围内,起重量大者取小值。 [M?]为所选制动器标准规格参数表中给岀的制动转矩。
6.2.7打滑验算
运行机构起动或制动时,塔式起重机不应发生打滑,一般由设计校验主动轮不打滑来保证。计算时 钢质车轮与钢轨的黏着系数(静摩擦系数)取0.12β
对于采用限矩型液力耦合器的运行机构,可不进行起动时的打滑验算。
6.3回转机构
6.3.1等效回转稳态阻力矩
等效回转稳态阻力矩My按式(87)计算。
Mrg=Mm+Mw + Ma ........................( 87 )
式中:
Mg ——等效回转稳态阻力矩,单位为牛顿米(N・m);
Mwr——回转摩擦阻力矩,主要是回转支承装置的摩擦阻力矩,单位为牛顿米(N・m);
MW—正常工作状态下的等效风阻力矩,单位为牛顿米(N・m),其中风阻力Pw3按式(10)计算;
Ma ——等效坡道阻力矩,按坡道阻力矩(按0.5%坡度计算)的0.7倍计算,单位为牛顿米(N・m)0
6.3.2电动机初选
6.3.2.1电动机型式
电动机型式可按Ll选择。
6.3.2.2 电动机的初选功率
6.3.2.2.1回转机构电动机等效功率按式(L.4)计算。
6.3.2.2.2对能提供有关按CZ值计算选择电动机资料的绕线转子异步电动机,可按式(L.7)计算所需 电动机功率。
6.3.2.2.3对能获得电动机负荷图(见图L.1)的回转机构,可按式(L.9)计算所需电动机功率。
6.3.3电动机的校验
6.3.3.1电动机的过载校验和发热校验
电动机过载校验方法见附录 ',发热校验方法见附录()。
6.3.3.2电动机使用环境的功率修正
电动机使用环境的功率修正见7.5.2.30
6.3.3.3起动加速度
对于电动机直接起动的回转机构应计算机构的起动加速度,以使塔式起重机起重臂头部切向加 (减)速度符合下列要求:
a) 对于回转速度较低的安装用塔式起重机,加(减)速度值应在0.1 m∕s2〜0.3 m/妒范围内,起重 量大者取小值;
b) 对于回转速度较高的建筑施工和吊运混凝土用塔式起重机.加(减)速度值应在0.4 m/s?〜 0.8 m∕s2范围内,起重量大者取小值。
6.3.4减速器的选择
回转机构的减速器按等效功率进行选择,减速器的工作特点和选择原则与运行机构减速器相同。
冋转减速器的输出齿轮应配有罩盖或其他装置以避免其破裂时坠落。
6.3.5制动器的选择
在回转机构最不利工作状态和最大回转半径时,其制动器应能使冋转部分从运动中停止,且还应能 使已停住的回转部分在工作中保持定位不动。一般情况下,宜先减速后制动,且其制动减速度应满足 6.3.3.3的要求,并应确保塔式起重机的回转部分在计算风压大于(见表19)时能自由回转。
回转机构的制动转矩按式(88)计算。
=⅜⅛" + M(∙ ........................( 88 )
9∙5o∕Z
式中:
MS ——回转机构的制动转矩,单位为牛顿米(N・m);
∑J——塔式起重机回转制动时,冋转机构及含吊运物品在内的全部回转运动质量换算到电动机 轴(制动器轴)上的机构总转动惯量,单位为千克二次方米(kg・ π√);
W ---同式(72);
L —回转机构制动时间,单位为秒(s);
Mr —换算到电动机轴上的等效回转力矩,单位为牛顿米(N・m),按式(89)计算。
+Ma -Mtn) ........................( 89 )
I
式中:
η—回转机构的总传动效率;
i——从制动器轴到回转支承装置的回转机构总传动比;
式中其他符号同式(87)0
6.4变幅机构
6.4.1变幅阻力
6.4.1.1动臂变幅机构的变幅阻力
动臂变幅机构变幅全过程中的不同幅度位置,变幅驱动件(如钢丝绳、齿轮、螺杆、液压缸活塞等)上 的总变幅阻力可能会有较大变化。毎一个变幅位置上变幅驱动件的最大变幅阻力按式(90)计算。
Pg=Po + P/ + Pw + PsΛ + Pe + P<∙ + P/ + Pa ........................( 90 )
式中:
Pt ——动臂变幅机构的变幅阻力,单位为牛顿(N);
Pu ——变幅时吊运物品非水平位移所引起的变幅阻力,单位为牛顿(N);
PI —臂架系统自重未能完全平衡引起的变幅阻力,单位为牛顿(N);
PW——作用在皆架系统上的风载荷引起的变幅阻力,单位为牛顿(N);
Ps—作用在吊运物品上的风载荷、塔式起重机回转时吊运物品的离心力以及变幅、回转、运行起 动或制动时在吊运物品上造成的水平惯性力等引起的起升滑轮组对铅垂线的偏角。造成 的变幅阻力,单位为牛顿(N);
Pf —臂架系统在塔式起重机回转时的离心力引起的变幅阻力,单位为牛顿(N);
PC —变幅过程中臂架系统相对回转中心线的径向惯性力引起的变幅阻力,单位为牛顿(N);
Pf—臂架校轴等关节中的摩擦力和补偿滑轮组的效率造成的变幅阻力,单位为牛顿(N);
Pa——行走轨道坡度等引起的变幅阻力,单位为牛顿(N)。
6.4.1.2动臂变幅机构在变幅全过程的变幅等效阻力
动臂变幅机构在变幅全过程的变幅等效阻力PM按式(91)计算。
∑P2ιi×ti
PH= Fɪ... ........................( 91)
式中:
Pld — 动臂变幅机构等效阻力,单位为牛顿(N);
PIi——臂架从位置i到位置i + 1幅度区段上两个相邻计算位置的变幅阻力的平均值,单位为牛 顿(N);
Ii ——PR的作用时间,单位为秒(S)。
6.4.1.3小车变幅机构的变幅阻力
6.4.1.3.1变幅静阻力
小车变幅机构的变幅静阻力包括摩擦阻力、等效坡道阻力(按1%坡度计算)、起升钢丝绳和牵引钢 丝绳绕过导向滑轮所引起的阻力。摩擦阻力包括车轮沿轨道滚动的阻力、车轮轴承内的摩擦阻力以及 车轮轮缘与轨道侧面间的附加摩擦阻力,后者一般是用前述两种基本摩擦阻力之和乘以附加系数&来 考虑,当小车采用无轮缘式车轮时,附加系数k取1.1,当采用有轮缘式车轮时,附加系数k取1.5;摩擦 阻力计算见6.2.1.Io
6.4.1.3.2稳定变幅最大牵引力
计算稳定变幅最大牵引力时,应考虑摩擦阻力(同6.4.1.3.1).正常工作状态下的最大风阻力PW} [见式(10)]、满载运行时的最大坡道阻力(按2%坡度计算)、起升钢丝绳和牵引钢丝绳绕过导向滑轮所 引起的阻力、牵引钢丝绳保持一定垂度所需的张力。
6.4.2电动机初选
6.4.2.1动臂变幅机构
动臂变幅机构所需电动机功率按式(L.5)计算。
6.4.2.2小车变幅机构
小车变幅机构所需电动机功率按式(L.3)计算。
6.4.3电动机的校验
6.4.3.1电动机的过载校验和发热校验
电动机过载校验方法见附录N,发热校验方法见附录()。
6.4.3.2电动机使用环境的功率修正
电动机使用环境的功率修正见7.5.2.3o
6.4.3.3起动加速度计算
变幅机构电动机选岀之后,应根据电动机容量和控制系统计算机构的起动加速度。动臂塔式起重 机变幅时,起重臂头部水平移动的加(减)速度不宜大于0.6 m∕s2;牵引小车式变幅时,变幅小车的加 (减)速度不宜大于05 m∕s2β
6.4.4减速器的选择
6.4.4.1动臂变幅机构
减速器的工作特点和选择原则与起升机构减速器相同。
6.4.4.2小车变幅机构
减速器的工作特点和选择原则与运行机构减速器相同。
6.4.5制动器的选择
6.4.5.1动臂变幅机构的制动器应符合下列要求:
a) 应至少装设一个常闭式机械支持制动器,制动轮/盘应与传动机构刚性联接;
b) 应设有可由操作者或超速保护开关控制的、直接作用于传动链末端(钢丝绳卷筒)的安全制动 器,以防止支持制动器失效和减少因传动链损坏而引发的事故,也可在更换或维修电动机、传 动装置和支持制动器时提供制动;
C)支持制动器、安全制动器的制动安全系数应分别不小于1.5;
d) 应釆取措施来自动控制支持制动器和安全制动器的动作顺序,防止产生不当的冲击载荷;
e) 制动减速度不应大于0.6 m∕s2;
f) 使用说明书应至少提供制动器零部件磨损检査的时间间隔和步骤;
g) 安全制动器与动臂变幅电动机之间应设联锁保护装置,使得在安全制动器撤去制动力矩前, 动臂变幅机构不能起动;
h) 制动衬垫表面应与制动轮/盘相匹配以避免不当磨损。
6.4.5.2小车变幅机构的制动器应符合下列要求:
a) 制动器的制动转矩加上运行摩擦阻力转矩(不包括侧面的摩擦阻力转矩)应能使处于不利情况 下的变幅小车在要求的时间内停住(所要求的时间按塔式起重机工作条件决定);
b) 制动器安全系数不应小于1.25;
C)应采用常闭制动器,且先减速后制动,制动减速度应符合6.4.3.3的要求。
6.5爬升系统
6.5.1通则
爬升系统包括外爬升系统和内爬升系统,用于增加或降低上回转塔式起重机的工作高度。
爬升系统的顶升传动装置宜釆用液压油缸。
6.5.2载荷和载荷组合
6.5.2.1 载荷
爬升系统的载荷包括常规载荷、偶然载荷和特殊载荷。
6.5.2.1.1常规载荷
常规载荷是指塔式起重机上部在爬升系统上爬升所产生的载荷,包括被顶起的塔式起重机部分的 自重载荷、起升载荷以及可能的相关爬升的载荷效应,如动力效应、摩擦载荷等。如无详细资料,爬升中 的摩擦载荷可近似地取为被顶起部分总重力的10%〜20%。
6.5.2.1.2偶然载荷
偶然载荷包括所考虑的设计偏离力矩和爬升工作时安装工况的风载荷。
偏离力矩是在爬升过程中,平衡力矩可能偏离的数值。设计偏离力矩是设计所考虑的由于对塔式 起重机上部平衡的任何可能的调整所引起的偏离力矩,其值应至少为可能发生的最大力矩的10%。该 最大力矩是由塔式起重机质量的重力(无任何起升载荷)对爬升系统爬升传动装置(例如油缸)轴线产 生的。
设计所考虑的安装工况风载荷,最小计算风速为14 m/s,对应计算风压为125 N∕m2β
6.5.2.1.3特殊载荷
特殊载荷包括异常安装工况风载荷、由爬升传动装置(例如油缸)能力引起的最大载荷和静态试验 载荷偏离力矩。
静态试验载荷偏离力矩取为设计偏离力矩的1.25倍,可视其为由于起升载荷增加了质量n而 引起的。
注:此处的部态试驼是指对爬升系统进行的静态试验.例如EN 14439:2OO6 + A2:2OO9的附录F规定,爬升系统应 在1.25倍设计偏离力矩下进行静态试验。
设计所考虑的异常安装工况风载荷,即爬升系统由于故障而停止一段时间时突然增加的风载荷,最 小计算风速为20 m/s,对应计算风压为250 N∕m2o
6.5.2.2载荷组合
6.5.2.2.1计算中应考虑的载荷和载荷组合以及安全系数见表470
表47将载荷组合分为LCI、LC2、LC3三类:
a) 载荷组合LCl为常规载荷的组合;
b) 载荷组合LC2为常规载荷与偶然载荷的组合,等于载荷组合LCl加上所考虑的设计偏离力 矩和爬升工作时安装工况风载荷;
C)载荷组合LC3包括常规载荷与偶然载荷、特殊载荷的组合,有LC3.1、LC3.2、LC3.3三种情况:
• LC3.1:考虑塔式起重机爬升工作的特殊情况.用异常安装工况风载荷替代载荷组合LC2 中的安装工况风载荷;
• LC3∙2:考虑爬升系统的能力可能引起爬升框架支撑的最大可能载荷的特殊情况;
• LC3.3:考虑爬升系统在静态试验条件下的特殊情况。
6.5.2.2.2对于在爬升工作期间有可能无法使塔式起重机返回安全状态(如由于电源故障)的情况,应 使用载荷组合LC3.10
注:允许用附加的方法来满足载荷组合LC3.1o
6.5.2.2.3爬升系统的载荷循环数少,不必考虑疲劳。
表47爬升系统的载荷和载荷组合
|
载荷类别 |
载荷 |
i |
载荷组合 LCl |
载荷组合 LC2 |
载荷组合LC3 | |||
|
1.C3.1 |
LC3.2 |
LC3∙3 | ||||||
|
常规载荷 |
重力、加速度、冲击 |
塔式起重机质址 |
1 |
1 |
1 |
1 |
1 |
1 |
|
起升载荷质量~ |
2 |
1 |
1 |
1 |
1 |
】+ 0 | ||
|
偶然载荷 |
环境作用 |
安装工况风载荷 |
3 |
■■■ |
1 |
—■ |
1 |
1 |
|
安装 |
设计偏离力矩 |
4 |
— |
1 |
1 |
1 |
I | |
|
特殊载荷 |
异常安装工况风载荷 |
5 |
■— |
— |
1 |
— |
— | |
|
安装,由爬升传动装置(例如油缸)引起的 最大载荷 |
6 |
-- |
— |
1 |
・■・, | |||
|
静态试验载荷偏离力矩_________ |
7 |
— |
— |
— |
1 | |||
|
总安全系数 |
1.48 |
1.34 |
1.22 | |||||
6.5.3顶升速度
顶升速度不应大于1.5 m∕min,宜取0.3 m/min〜0.8 m∕min,大型塔式起重机取小值。
6.5.4液压爬升系统
6.5.4.1液压爬升系统油箱容积可按式(92)确定。
V =冷 ........................(92)
2 X IO6
式中:
V——油箱容积,单位为升(L);
D——油缸内腔直径,单位为毫米(mm);
〃一油缸数目;
La--油缸行程,单位为毫米(mm)。
6.5.4.2爬升用液压油缸应校核稳定性,校核方法参见附录PO
6.5.4.3液压系统及元件应符合6.9.1的要求。
6.6自行架设机构和辅助机构
自行架设机构是塔式起重机为完成自身架设作业而设置的机构。辅助机构是为方便塔式起重机的 维修、安装、拆卸等作业而设置的机构。
自行架设机构及辅助机构的设计,应根据不同的使用条件及最不利工况的载荷确定机构传动性能 和零部件力学性能,确保安全、方便、可靠。
6.7通用机械零件
6.7.1通则
塔式起重机机械零件的设计计算包括强度(含疲劳强度)、稳定性、耐磨及防过热等验算。但并非全 部零件都要进行这些验算,而应根据零件所处的部位及其受载情况合理地选择必要的验算项目。
本章给出的塔式起重机机械零件验算方法都是安全系数法。
6.7.2计算载荷
塔式起重机机械零件的计算载荷,如本章的其他条款有规定,则应执行其规定,否则应按4.3和4.4 考虑有关载荷及载荷组合A、B、C,但取分项载荷系数/, = I0
6.7.3静强度验算
6.7.3.1 通则
静强度验算包括抗脆性断裂及防止出现塑性变形验算,为此应验证其计算应力不超过所采用材料 的许用应力。传动机构中的大多数零件均应进行此项验算,其他受力较大的零件也应进行此项验算。
对于弹塑性较好的材料(屈服点七与抗拉强度久之比小于0.7),其许用应力应用材料的屈服点除 以安全系数〃,来计算(见6.7.3.2.1);对于高强度材料或经过热处理提高了机械性能的材料(屈服点J 与抗拉强度久之比不小于0.7),为防止其发生脆性破坏,其许用应力应用材料的抗拉强度除以安全系 数&来计算(见6.7.3.2.2)0
6.7.3.2许用应力值
6.7.3.2.1当钢材的屈服点七与钢材的抗拉强度。,,之比小于0.7时,许用应力值官]按式(93)确定。
[α] =σt∕ni ........................( 93 )
式中:
Lσ]——钢材的基本许用应力,单位为牛顿每平方毫米(N∕mm2);
Z —钢材的屈服点,单位为牛顿每平方毫米(N/mm2);
丄一一与钢材的屈服点及载荷组合相对应的安全系数,见表48o 6.7.3.2.2当钢材的σ,∕σfe≥0.7时,许用应力值農]按式(94)确定。
[b] Z=Z(JhInb ........................( 94 )
式中:
[σ]——钢材的基本许用应力,单位为牛顿每平方毫米(N/mm2);
Gb —-钢材的抗拉强度,单位为牛顿每平方毫米(N/mm2);
S —与钢材的抗拉强度及载荷组合相对应的安全系数,见表48o
表48安全系数〃,和七
|
载荷组合 |
安全系数 | |
|
∏6β | ||
|
A和B |
1.48 |
2.2 |
|
C |
1.22 |
1.8 |
|
β对灰铸铁,办值增加25%。 | ||
6.7.3.3计算应力与许用应力之间的关系
机械零件危险点的计算应力,用通常的力学方法计算,复合应力按合适的强度理论予以合成。当计 算应力与许用应力農]之间符合以下关系时,即认为该机械零件满足了强度条件:
a) 纯拉伸:1.25。,<|>],外为计算的拉伸应力;
b) 纯压缩:σf≤Lσ],σt.为计算的压缩应力;
C)纯弯曲∙σz≤[σ],σz为计算的弯曲应力;
d) 拉伸和弯曲复合U.25σ,+σz≤[σ];
e) 压缩和弯曲复合。+σz≤[σ];
f) 纯剪切:√3F≤[σ]5
g) 拉伸、弯曲和剪切复合:√(1.25σf+σz)2÷3r2≤Lσ];
h) 压缩、弯曲和剪切复合s√(σf +σz)2+3τ2≤[σ]o
6.7.4稳定性验算
6.7.4.1 通则
稳定性验算计算包括对易丧失弹性稳定的零件进行的防弹性失稳验算、对较长的高速传动轴进行 防止达到临界转速的验算等。对于采用高强度材料的零件,更应重视其弹性稳定性验算。
6.7.4.2弹性稳定性验算
对易于弹性失稳的零件应验算其弹性稳定性,验算可按5.4进行。
6.7.4.3轴的临界转速
对转速超过400 r/min的长传动轴,应计算其临界转速,并满足式(95)o
式中:
〃幡一轴的实际最大转速,单位为转每分(r/min);
Jd(+d2
∏er ——轴的临界转速,单位为转每分(r/min), = 1 210 —;
di ——空心轴的内直径,单位为厘米(cm);当为实心轴时,払=0;
d —轴外径,单位为厘米(cm);
I —轴的支点间距,单位为米(m)。
6.7.5耐磨及防过热验算
6.7.5.1 通则
耐磨及发热验算包括对受力较大的摩擦磨损件进行耐磨验算和对可能出现较高发热的零件进行防 止过热验算。对于釆用新金属及非金属材料制成的该类零件,更应进行此项验算。
6.7.5.2耐磨验算
对于受磨损的零件,根据经验应对一些影响磨损的特定物理量进行验算,使之不会导致过度磨损。 如对制动器、离合器及滑动支承等,应验算其摩擦表面的单位面积压力强度P及与摩擦面相对运动速 度”乘积的特性系数力寸值,该值不应超过允许范围。
6.7.5.3防过热验算
对于盘式或鼓式制动器,其摩擦面应选用耐磨损耐高温的材料,制动轮/盘应有良好的散热条件;对 频繁动作的制动器应进行散热验算;温度升高会引起制动轮/盘与制动衬垫之间的摩擦系数变化,必要 时应进行制动器热容量验算。采用液力偶合器的传动系统应具有足够的散热条件,并应采取防过热的 保护措施。
6.7.6疲劳强度验算
6.7.6.1 通则
对承受应力循环次数较多的零件,应进行抗疲劳验算。
6.7.6.2 一般方法
机械零件的疲劳强度主要由以下因素确定:
-制造零件的材料;
—一形状、表面情况、腐蚀状态、尺寸(比例效应)和其他产生应力集中的因素;
——在各种应力循环过程中出现的最小应力和最大应力的比值;
--应力谱;
--应力循环数O
实际机械零件在交变载荷(应力循环特征值Γ = -1,即对称应力循环)下的疲劳极限,以其所采用 的材料制成的抛光试件在交变载荷(应力循环特征值尸=一1)下的疲劳极限为基础,用考虑零件的几何 形状、表面情况、腐蚀状态和尺寸等因素对疲劳强度不利影响的一些系数来进行修正。
借助疲劳极限曲线[史密斯(SMITH)图,见图21],由交变载荷(应力循环特征值r=-l)下的疲劳 极限,可得出与其他应力循环特征值r相对应的疲劳极限。该图中的疲劳强度曲线的形状作了线性 简化。
这种确定实际零件相对于已知应力循环特征值r的疲劳极限的方法,可以用来绘制疲劳寿命曲线 [威勒(WOHLER)曲线,见图22],此曲线表示了在具有相同的应力循环特征值r的应力循环下疲劳应 力与应力循环数的关系。根据此曲线,利用迈因纳(MlNER)疲劳损伤线性累积理论,结合机械零件的 工作级别,便可确定其疲劳强度。
本标准中确定疲劳强度的方法,不适用于经过表面处理(如淬硬、氮化、表面硬化)的零件。某一疲 劳寿命曲线只能用来确定在材料、形状和尺寸以及加工处理方面均与其所代表的零件相同的那些零件 的疲劳强度。
应力循环数小于8 000次时,可不必进行疲劳计算。
6.7.6.3抛光试件在交变载荷(应力循环特征值r=-1)T的疲劳极限
研究表明,机械零件的抛光试件在交变旋转弯曲作用下的疲劳极限值。如•,可近似地作为交变非旋 转弯曲作用下疲劳极限值。
交变轴向拉伸和压缩作用下的疲劳极限值,应比b皈减少20%。
交变剪切(纯豹切或扭转)作用下的疲劳极限rw可由式(96)导出。
√3
式中:
rtt.——抛光零件在交变剪切(纯剪切或扭转)作用下的疲劳极限,单位为牛顿每平方毫米 (N∕mm2);
f ——抛光试件在交变旋转弯曲作用下的疲劳极限值,单位为牛顿每平方毫米(N∕mm2)o
此处给定的。版值,一般为对应于90%完好率的统计值。对常用的材质为碳钢的机械零件,其 值可按式(97)确定。
。知=0.5σ6 ........................( 97 )
式中:
^bU-----同式(96);
6 ——钢材的抗拉强度,单位为牛顿每平方毫米(N∕mm2)o
6.7.6.4形状、尺寸、表面情况和腐蚀的影响
对于所使用的零件,由于其形状、尺寸、表面(机械加工)情况及其腐蚀状态等因素的影响,其在交变 载荷下的疲劳极限相对于抛光试件的理想状态必然有所降低。分别用系数 UK,和K来考虑这 些影响。这些系数可按附录Q确定。
零件在交变载荷(应力循环特征值r=-l)下拉伸、压缩、弯曲和扭转剪切的疲劳极限C.或由 式(98)〜式(Ioo)给出。
UT
κ,κdκκ
(98
KKKK
(99
在纯剪切情况下,取:
τwr = τu
(100
式中:
九八Jr ——零件拉伸、压缩、弯曲和扭转剪切的疲劳极限,单位为牛顿每平方毫米(N∕mm2);
——同式(96);
K.、K八K-K, ——系数,按附录Q确定。
6.7.6.5疲劳极限曲线(史密斯图)
图21的疲劳极限曲线表达了疲劳极限c(或曲)与极值应力比,(即应力循环特征值尸)、抗拉强度 5,和交变载荷(应力循环特征值r=-l)下的疲劳极限σur(ruτ)之间的假设关系,这些关系也如表49 所示。
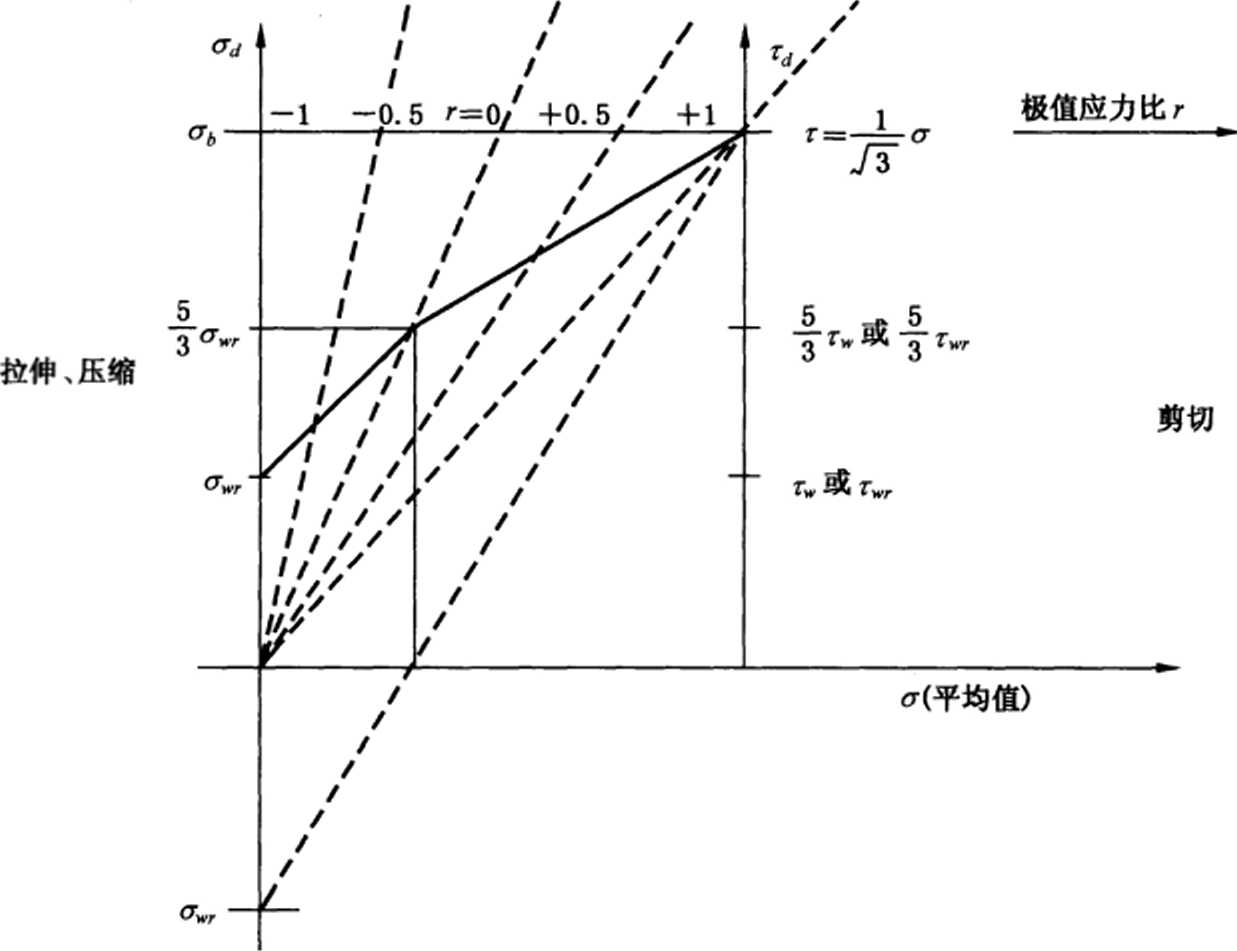
图21疲劳极限曲线
表49机械零件疲劳极限σd(τd)与SgMT的关系
|
正应力 |
-l≤r<0 |
5 |
交变应力 | ||
|
0≤r≤l |
J=— 1- |
5 ―d 3 ur ': 5 ]兰 |
r |
脉动应力 | |
|
剪切应力 |
-l≤r<0 |
5 以=TUT |
交变应力 | ||
|
0≤r≤l |
"=— I- |
5 ∙∣√jj 1-- Ob |
r A |
脉动应力 | |
6.7.6.6疲劳寿命曲线(威勒曲线)
图22的疲劳寿命曲线表示了当所有应力循环具有相同的幅值和相同的应力循环特征值r时,疲劳 破坏前能承受的应力循环数〃丁和最大应力。3)之间的函数关系,见式(IOI)〜式(10β)β
a)对于 wτ≤8×103;
o =σb
(IOl )
Ob
..............................(102 )
b)对于8×103<nr<2×106的有限疲劳区,这一函数关系可由图22双对数坐标中的TD直线 来表示。在所考虑的区间内,威勒曲线的斜率由C来表示:
厂 lg2×106-lg8×103 , I®、
IgC — Igbd
lg2×106~lg8×103
或 C = tanφ =................ ( 104 )
I I Ig TZ—Ige √3
C)对于 wτ≥2×106:
o =OJ ........................( 105 )
或 r = r4 ..............................( 106 )
式(IoI)〜式(106)中:
σ.r —最大应力,单位为牛顿每平方毫米(N∕mm2);
W —钢材的抗拉强度,单位为牛顿每平方毫米(N/mm2);
C ——威勒曲线斜率;
tanφ--威勒曲线斜率;
J —机械零件的疲劳极限,单位为牛顿每平方毫米(N∕mm2);
" ―机械零件的剪切疲劳极限,单位为牛顿每平方毫米(N∕mm2)o
上述C值表示了该机械零件实际的应力谱系数Kt值。
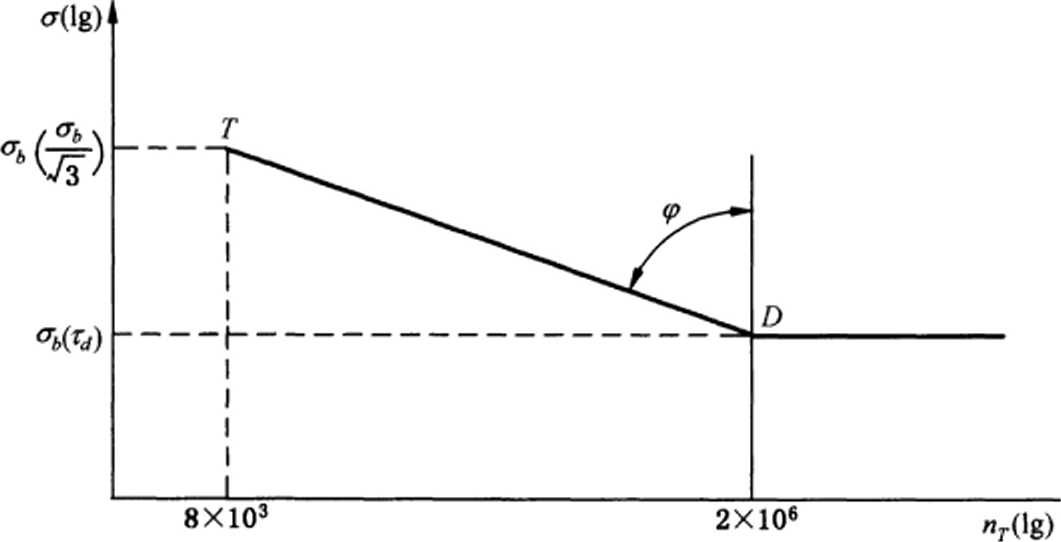
图22疲劳寿命曲线
6.7.6.7疲劳强度
一个已知的机械零件,其拉伸或压缩疲劳强度σr或剪切疲劳强度rr可以分别用式(107)和式
(108)来确定。
(Jr =2TZ ・ Gd ........................( 107 )
或 τr=2⅛2 ・ C ........................( 108 )
式中:
J —机械零件的拉伸或压缩疲劳强度,单位为牛顿每平方毫米(N∕mm2);
j —该机械零件工作级别的组别号,丿=1〜8,见表14;
C —机械零件的剪切疲劳强度,单位为牛顿每平方毫米(N/mm2);
C —威勒曲线斜率;
J—机械零件的疲劳极限,单位为牛顿每平方毫米(N∕mm2);
C―机械零件的剪切疲劳极限,单位为牛顿每平方毫米(N∕mm2)o
机械零件总应力循环数Zrr和应力谱系数KS的组别划分和相应于每一组别的临界疲劳应力如 图23所示,其中表示用于工作级别的应力。对临界剪切应力,字母。用匸来代替。
(BO) (BI) (B2) (B3) (B4) (B5) (B6) (B7) (B8) (B9)
σ(∣g)i
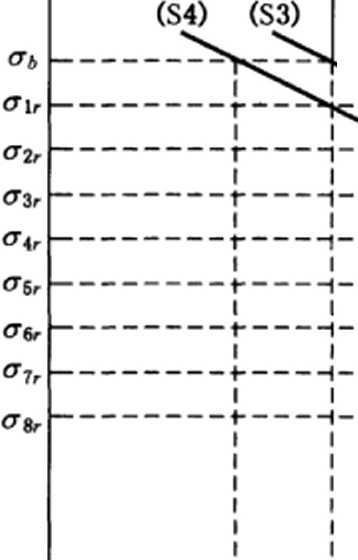
I K= 1.000 0.500 0. 250 0. 125
(EI)
(E2)
(E3)
——(E4) ―(E5) __ (E6) -(E7) ―(E8) _ _ (E9)
OooOOO 8 Ooo Ooo 寸 08 OOOZ OoOooO I Ooo OOg Ooo OSZ OOo 富一 Ooo S9 OOO ZE OOO 91 OOo 8

图23每个零件组别的临界疲劳应力图
6.7.6.8疲劳许用应力和疲劳验算
将式(107)及式(108)中所定义的。「和。分别除以安全系数心[见式(109)],可求出疲劳许用应力 和见式(IIo)和式(IlI)O
取: = 3.2* ..............................( 109 )
疲劳许用应力为: [σr] = - ..............................( 110 )
nr
M]=W ........................( Hl)
nr
疲劳验算见式(112)和式(113)β
σ ≤ [σr] ........................( 112 )
或
r ≤ [rr] ........................( 113 )
式(109)〜式(113)中:
再——疲劳安全系数;
C ——威勒曲线斜率;
[”]—机械零件拉伸或压缩疲劳许用应力,单位为牛顿每平方毫米(N/mm,);
CrJ——机械零件的剪切疲劳许用应力,单位为牛顿每平方毫米(N∕mm2);
J ——机械零件的疲劳极限,单位为牛顿每平方毫米(N∕mrn2);
曲——机械零件的剪切疲劳极限,单位为牛顿每平方毫米(N∕mm2);
a —最大正应力,单位为牛顿每平方毫米(N∕mm2)0
受具有不同应力循环特征值厂的正应力和剪切应力同时作用的零件,应满足式(114)o
式中:
C--ʃ方向或y方向的最大正应力,单位为牛顿每平方毫米(N∕mm2);
^Xr^yr--ʃ方向或V方向的正应力疲劳强度,单位为牛顿每平方毫米(N/mm2);
r —最大剪应力,单位为牛顿每平方毫米(N∕mm2);
C ——机械零件的剪切疲劳强度,单位为牛顿每平方毫米(N/mm2);
丄 ——疲劳安全系数。
如果不能确定相应应力队、4和r前述关系的最不利的情况,则应分别计算相应于载荷的σz max X 4m心和TnMX以及最不利的相应应力。
应注意上述计算并不能保证机械零件抗脆性破坏的安全性,只有选择合适的钢材质量组别才能确 保这种安全性,可参见附录D。
6.8特殊零部件
6.8.1钢丝绳
6.8.1.1钢丝绳选用原则
塔式起重机用钢丝绳应符合GB/T 20118的要求。
当塔式起重机用于吊运危险或重要物品时,应釆用符合GB 8918的钢丝绳。
承载钢丝绳的公称直径不应小于6 mmO
钢丝绳的选择应满足本标准规定的最低要求。本标准规定的钢丝绳使用的前提是:所采用的钢丝 绳出厂时已得到正确润滑,滑轮和卷筒的卷绕直径选择符合6.8.2.1o
6.8.1.2钢丝绳结构型式的选择
起升用钢丝绳宜釆用阻旋转钢丝绳。
6.8.1.3钢丝绳直径的选择
6.8.1.3.1确定钢丝绳最大工作静拉力
确定钢丝绳最大工作静拉力时,应考虑:
a)对起升用钢丝绳,计算最大工作静拉力时,应考虑下列因素:
• 塔式起重机的总起升载荷,包括额定起重量、吊具及部分悬垂钢丝绳的重力;部分悬垂的 起升钢丝绳的重力,建议取为按起升高度计算的起升钢丝绳重力的50%;
• 起升钢丝绳缠绕滑轮组的倍率Q和绕上卷筒的钢丝绳分支数;
• 吊钩在起升到上极限位置时,如果钢丝绳与铅垂线夹角大于22.5°时,还需要考虑由钢丝 绳的倾斜引起钢丝绳拉力的增大;
• 钢丝绳系统的总传动效率η.,可按式(115)计算;
• 增大系数兀.,考虑动力效应及无法预料的偶然因素会导致实际出现的钢丝绳拉力超岀计 算拉力的某种可能性;系数y:”取决于机构的工作级别,见表50。
1 — ^aI
K= --- Xr)D ........................(115)
式中:∙
K —钢丝绳系统的总传动效率;
ηl —单个滑轮的效率(采用滚动轴承的取0.98,采用滑动轴承的取0.96);
a —钢丝绳滑轮组的倍率;
如——导向滑轮的效率。
表50増大系数/的数值
|
机构工作级别 |
Ml |
M2 |
M3 |
M4 |
M5 |
M6 |
|
1.00 |
1.04 |
1.08 |
1.12 |
1.16 |
1.20 |
b)对不专门用于起升垂直载荷的其他各种用途钢丝绳,计算最大工作静拉力时,应考虑下列因素:
• 按工作状况下最不利载荷组合确定钢丝绳的最大工作静拉力S;
• 当钢丝绳用作水平运动的牵引时,应考虑牵引对象作水平运动时的摩擦阻力、坡道阻力以 及起升钢丝绳绕过起升及导向滑轮系统的阻力等;
• 当钢丝绳用作动臂变幅运动的牵弓I时,除按6.4.1.1考虑最大变幅阻力外,还应考虑钢丝 绳缠绕滑轮组的倍率Q、滑轮组的效率及增大系数y∖滑轮组的效率可参照式(115)计 算;增大系数尤同起升用钢丝绳,见表50,但对于静态钢丝绳,取/I = Io
6.8.1.3.2钢丝绳选用计算
在本标准中,钢丝绳选用计算采用C系数法或最小安全系数法,具体如下:
a) C系数法。
本方法只适合用于运动钢丝绳。选用的钢丝绳直径不应小于按式(116)计算的钢丝绳直径。 dmm=C4S ........................( 116 )
式中:
dmιn—钢丝绳的最小直径,单位为毫米(mm);
S ——钢丝绳最大工作静拉力,单位为牛顿(N),按6.8.1.3.1确定;
C——钢丝绳选择系数,单位为Inm∕√N,与钢丝的公称抗拉强度、钢丝绳最小安全系数、钢 丝绳结构有关,按式(117)计算。
(117 )
式中:
〃—钢丝绳最小安全系数,按表51选取;
k,—钢丝绳最小破断拉力系数,见表52;
σz——钢丝的公称抗拉强度,单位为牛顿每平方毫米(N∕mm2)o
b)最小安全系数法。
本方法对运动钢丝绳和静态钢丝绳都适用。按与钢丝绳所在机构工作级别有关的安全系数 选择钢丝绳直径。所选钢丝绳的最小破断拉力应满足式(118)o 式中:
FO ≥ Sn
........................(118 )
FO—钢丝绳最小破断拉力,单位为千牛(kN);
S——同式(116);
同式(H7)β
表51最小安全系数〃值
|
机构工作级别 |
Ml |
M2 |
M3 |
M4 |
M5 |
M6 |
|
静态钢丝绳 |
2.5 |
2.5 |
3.0 |
3.5 |
4.0 |
4.5 |
|
运动绳钢丝 |
3.15 |
3.35 |
3.55 |
4.0 |
4.5 |
5.6 |
|
注:对于吊运危险载荷、重要物品的主起升钢丝绳,一般选择比设计工作级别高一级的n值。 | ||||||
表52钢丝绳最小破断拉力系数A'
|
组别 |
类别 |
最小破断拉力系数/ | |
|
纤维芯钢丝绳 |
钢芯钢丝绳 | ||
|
k∖ | |||
|
1 |
6X7 |
0.332 |
0.359 |
|
2 |
6X19 |
0.330 |
0.356 |
|
3 |
6X37 | ||
|
4 |
8X19 |
0.293 |
0.346 |
|
5 |
8X37 | ||
|
6 |
18X7 |
0.310 |
0.328 |
|
7 |
18X19 | ||
|
8 |
34X7 |
0.308 |
0.318 |
|
9 |
35WX7 |
0.360 | |
|
10 |
6V×7 |
0.375 |
0.398 |
|
11 |
6VX19 |
0.360 |
0.382 |
|
12 |
6VX37 | ||
|
13 |
4VX39 |
0.360 |
— |
|
14 |
6Q×19÷6V×21 |
0.360 | |
注1:在第11组钢丝绳中,股含纤维芯6VX21、6VX24结构钢丝绳的最小破断拉力系数,比表中所列的数小 8⅜,6V×3O结构钢丝绳的最小破断拉力系数,比表中所列的数小10%;在第12组钢丝绳中.股为线接触 结构6VX37S钢丝绳的最小破断拉力系数则比表中所列的数大3%。
注2:如果选用特殊结构钢丝绳,需由钢丝绳制造商提供&值,并明确在产品证书中。
6.8.1.4钢丝绳端部的固定
钢丝绳端部的固接应安全可靠。可采用的绳端固接方法和要求见GB 5144o
6.8.2滑轮和卷筒
6.8.2.1滑轮和卷筒的卷绕直径
滑轮和卷筒(第一层)钢丝绳中心的卷绕直径按式(119)计算。
D =h Xd
(119 )
式中:
D 一一滑轮和卷筒(第一层)钢丝绳中心的卷绕直径,单位为毫米(mm);
h —卷筒、滑轮和平衡滑轮的卷绕直径与钢丝绳公称直径之比值,分别为如、奴*3,不应小于 表53规定的值;
d —钢丝绳公称直径,单位为毫米(mm)O
表53系数人
|
机构I:作级别 |
卷筒如 |
滑轮心 |
平衡滑轮奶 | |||
|
普通钢丝绳 |
阻旋转钢丝绳 |
普通钢丝绳 |
阻旋转钢丝绳 |
普通钢丝绳 |
阻旋转钢丝绳 | |
|
Ml |
11.2 |
12.5 |
12.5 |
14 |
11.2 |
12.5 |
|
M2 |
12.5 |
14 |
14 |
16 |
12.5 |
14 |
|
M3 |
14 |
16 |
16 |
18 |
12.5 |
14 |
|
M4 |
16 |
18 |
18 |
20 |
14 |
16 |
|
M5 |
18 |
20 |
20 |
22.4 |
14 |
16 |
|
M6 |
20 |
22.4 |
22.4 |
25 • |
16 |
18 |
|
注1:按6.8.1的方法算得的最小钢丝绳直径并用其确定了卷筒和滑轮的最小直径后.只要实际采用的钢丝绳直 径不超出原算得的最小直径的125%、钢丝绳实际的拉力不超过原计算钢丝绳最小直径时用的最大丁.作静 拉力S值.则新选的钢丝绳仍可以与算得的卷筒和滑轮的最小直径配用。 注2:本表的方值不能限制或代替钢丝绳制造商和塔式起重机制造商之间的协议,当釆用不同柔性的新型钢丝 _____绳时尤其如此。______________________________________________ | ||||||
6.8.2.2滑轮、卷筒材料和结构型式选择
6.8.2.2.1滑轮、卷筒材料
采用金属材料铸造的滑轮和卷筒,应选用力学性能不低于GB/T 9439中的HT2OO或力学性能不 低于 GB/T 11352 中的 ZG270-500o
焊接、轧制滑轮和卷筒应选用力学性能不低于GB/T 700中的Q235B;根据使用工况和环境温度的 需要,也可采用力学性能不低于GB/T 1591中的Q345B。
允许采用满足使用要求的其他材质的滑轮。
6.8.2.2.2滑轮、卷筒的结构型式
铸造滑轮和双辐板压制滑轮宜符合GB/T 27546,焊接滑轮宜符合JG/T 5078.10
铸造卷筒的结构型式宜符合JB/T 9006o
6.8.2.2.3 绳槽半径
滑轮、卷筒的绳槽半径r与钢丝绳公称直径d的比值应满足式(12O)O
r = (0.53 〜0.6)J ........................( 120 )
式中:
r——滑轮、卷筒的绳槽半径,单位为毫米(mm);
d ——同式(119)o
6.8.2.3钢丝绳允许偏角
6.8.2.3.1钢丝绳绕进或绕出滑轮槽时的最大偏斜角(即钢丝绳中心线和垂直滑轮轴平面之间的角度) 84
不应大于4°;对阻旋转钢丝绳不应大于2o0
6.8.2.3.2钢丝绳绕进或绕出卷筒时偏离绳槽两侧的角度不应大于3.5°;对阻旋转钢丝绳不应大于2°。
6.8.2.3.3对于无绳槽卷筒和多层缠绕卷筒,钢丝绳偏离垂直卷筒轴平面的角度不应大于1.5oo大于 1.5°时应设置排绳器或导向装置。
6.8.2.4钢丝绳在卷筒上的固定
钢丝绳在卷筒上的固定应安全可靠。钢丝绳在放出最大工作长度后,卷筒上的钢丝绳至少应保留 3圈。当钢丝绳和卷筒之间的摩擦系数取为().1时.在此安全圈下,绳端固定装置应在承受2.5倍钢丝 绳最大工作静拉力时不发生永久变形。
6.8.2.5卷筒壁和侧板厚度的计算
卷筒壁及其侧板的厚度计算参见附录RO
6.8.3车轮与轨道
6.8.3.1 材料
6.8.3.1.1车轮的材料
车轮的材料及热处理应符合JB/T 11865的规定。
6.8.3.1.2轨道材料
塔式起重机轨道用材料推荐如下:
— 采用轻轨时,推荐用力学性能不低于GB/T 11264中55Q的材料;
——采用重轨时,推荐用力学性能不低于GB 2585中U7IMn的材料;
一一采用起重机钢轨时,推荐用力学性能不低于YB/T 5055中U71Mn的材料。
注:当釆用其他型钢、方钢、扁钢等做轨道时,需注意其材质和硬度的实际情况,必要时可降低轮压,以保证有足够 的使用寿命。
6.8.3.2车轮的校验计算
车轮的校验计算应符合GB/T 26477.1 ,但其中的载荷和载荷组合按4.3和4.4确定。
6.8.4缓冲器
缓冲器应按碰撞动能及最大碰撞力,并考虑缓冲行程来选用,最大减速度不超过设计允许值。
宜采用符合 JB/T 7O17JB∕T 811O.1JB/T 8UO.2JB/T 10833 的缓冲器。
6.8.5联轴器
6.8.5.1机械式联轴器的选择
机械式联轴器,一般可从联轴器标准规格中选取,然后验算所传递的转矩,使其满足式(121)o
Ml, ≤ [MJ ........................( 121 )
式中:
[MJ一 一联轴器的许用转矩,单位为牛顿米(N・m);
ML ——联轴器的计算转矩,单位为牛顿米(N・m),按式(122)计算。
ML=M ........................(122)
式中:
k —一系数,与工作级别、联轴器的重要性及所连接的轴有关,一般为1.3〜3.1,起升机构和动臂 变幅机构宜取大值;
ML—需要联轴器传递的转矩,单位为牛顿米(N・m)o
6.8.5.2液力偶合器的选择
一般采用限矩型(yoχ)液力偶合器和普通型(yop)液力偶合器。
限矩型液力偶合器根据泵轮转速、额定转差率S和传递功率P,按JB/T 11866中选取。
普通型液力偶合器根据泵轮转速丄和传递功率P从制造商产品标准中选取。
6.8.6电磁离合器的选择
起升机构采用的摩擦片电磁离合器一般是离合器不带载荷时在静态下离合。可从摩擦片电磁离合 器的标准规格表中选用,然后按所传递的静摩擦转矩进行验算,使其满足式(123)o
MK ≤LMt] ........................( 123 )
式中:
[M;.]—电磁离合器规格参数表中给出的额定转矩,单位为牛顿米(N・m);
ML ——电磁离合器的计算转矩,单位为牛顿米(N・m),按式(124)计算。
MLkM= ........................( 124 )
式中:
k——电磁离合器的安全系数以一般取2.0;
Ml——电磁离合器的计算基本载荷,单位为牛顿米(N・m)o参照4.3.2.4计算;其中驱动机构加 减速动力系数代在Ll〜1.5之间取值。
6.8.7齿轮设计
塔式起重机用齿轮设计应进行齿面接触强度和轮齿弯曲强度计算,釆用的设计计算方法应结合塔 式起重机工作特点,并满足不同类型和使用场合的塔式起重机各机构的安全性和可靠度要求。渐开线 圆柱齿轮的承载能力计算应符合GB/T 3480、GB/T 3480.5和GB/T 10062的规定。
制造商应阐明齿轮设计所用方法和依据,并按4.3和4.4给出的方法(分项载荷系数取为1)确定齿 轮计算载荷,按4.2.3确定其所在机构的总使用时间,或按4.2.4确定其使用等级。
6.8.8回转支承
6.8.8.1回转支承的选型原则
回转支承按回转机构工作级别选取。
6.8.8.2回转支承计算工况及载荷
回转支承应根据4.4中的载荷组合B、C及安装状态最大载荷(分项载荷系数取为1),分别计算作 用在回转支承中心的载荷,将每种计算工况的载荷组合为轴向力Fv、水平力F方和倾翻力矩M。
6.8.8.3回转支承选型验算
根据6.8.8.2中的载荷FVyFh、M计算当量外载荷F”,计算方法参见附录S的S.lo
回转支承的当量静载荷F。以回转支承供应商提供的参数为准;如供应商不能提供,则可参考S.2 的方法进行计算。
所选回转支承应满足式(125)β
F0 ≥ Kn, ×F^ ........................( 125 )
式中:
FO——回转支承当量静容量,单位为牛顿(N);
FW —回转支承当量外载荷,单位为牛顿(N);
Kni—回转支承安全系数,取不小于表54的值。
表54回转支承安全系数K”
|
回转机构工作级别 |
Ml 〜M3 |
M4 |
M5 |
M6 |
|
正常工作状态 |
1.15 |
1.25 |
1.35 |
1.45 |
|
非工作状态 |
1.15 |
1.15 |
1.15 |
1.15 |
|
安装状态 |
1.15 |
1.15 |
1.15 |
1.15 |
6.8.8.4回转支承安装螺栓
6.8.8.4.1安装螺栓及其配套螺母应分别选用8.8级及8级以上的高强度螺栓副。
6.8.8.4.2安装螺栓应进行静强度验算,验算方法参见S.3.1o
6.8.8.4.3当回转支承与其相连的上下支座采用螺纹孔安装时,螺栓在上下支座上的最小拧入深度不 应小于规定值,参见表S.4。
6.8.9 吊钩
6.8.9.1吊钩应按GB/T 10051.1的规定选取。
6.8.9.2起重吊钩附件(包括吊钩螺母、吊钩横梁等)应按GB/T 10051.8〜10051.11的规定选取。
6.8.9.3吊钩应设有防止取物装置非人为脱出的装置。
6.9液压系统及内燃发动机
6.9.1液压系统
6.9.1.1 基本要求
液压系统及相关元件的特性应符合GB/T 3766的规定。
6.9.1.2液压油
液压油的物理和化学特性应满足使用和预期循环次数的要求。
液压油的黏度应确保系统在塔机工作温度范围内正常工作。
6.9.1.3 油箱
油箱的最高和最低油位应有标识。
回油口的尺寸与位置选择应能限制液压油的流速,以避免产生紊流。
6.9.1.4滤油器
液压系统应安装滤油器,滤油器的过滤能力应满足液压元件的工作要求。
考虑允许的温升,在预期黏度变化范围内,滤油器的规格应能满足所有工况下的额定流量要求。
如果没有安装堵塞指示器,建议安装旁路以便滤油器发生堵塞时液压油可从旁路通过。
6.9.1.5 液压回路
当一个或多个元件出现失效或发生故障时,液压回路的设计制造应能使风险降到最低。
液压回路的设计应保证在正常操作情况下,油缸和其他驱动装置运动的可控制性。
每个液压回路至少要有一个测压点。
考虑到执行机构可能长期不动作,应采取措施防止气穴现象。
应采取可靠措施,使液压系统的工作油温不超过80笆。
6.9.1.6 泵
在设计的工作范围内,泵应能提供所需的流量。
泵的最大工作压力不应小于溢流阀的设定压力。
应采取有效措施防止或限制动力机反转,尤其是该反转会损坏泵或其他部件时;当动力机反转的损 坏风险可忽略时,则可只提供现场检査运动方向的指示或警告。
6.9.1.7 管路与接头
软管和接头的破断压力不应小于各自最大工作压力的4倍。
液压安全阀应通过硬管与油缸相连,宜直接安装在油缸Lo以防止油缸所支承的载荷在管路压力 不足(例如管路泄漏)或油管失效时发生意外下降。
具有安全功能的管路和接头的安装位置应便于安全检查及维护。
6.9.1.8 油缸
在正常工•作状态下,考虑到所有可预见的过压(如温度变化引起的),油缸产生的最大力不应对油缸 及与之相联的构件产生破坏。
当使用单作用油缸时,应确保活塞杆安全收回。
回路应能防止油缸内腔部分或全部真空。应提供在每次使用前对可能形成的真空进行检査和处理 的方法。
考虑到设备的工作环境和停用时间,应防止活塞杆腐蚀。
油缸应有液压锁,当动力不足或油管失效时可以停止油缸运动。液压锁应能解除任何有危险的 过压。
当活塞杆在外载作用下运动时,应装有保持活塞杆平稳运动的装置,以防止对结构产生任何振动。
油缸的安装除了应方便部件的拆卸外,还应方便对塔机和相关部件的维护操作。
6.9.1.9 阀
要求使用者调节的阀应安装在易于接近的位置。
6.9.1.10 防止超压
应采取措施防止工作压力超出规定的最大工作压力;应釆取适当的预防或构造措施防止工作压力 (包括瞬时尖峰压力)超出1.6倍规定的额定工作压力。
6.9.1.11防止传动装置意外起动
应有措施防止塔式起重机机构在液压动力中断(包括正常中断和故障中断)后重新供应时发生任何 意外动作,例如采用电气联锁或动力中断时控制装置自动回复零位的方法来防止。
6.9.2发动机
安装在塔式起重机上的内燃发动机,其性能参数和附属装置(如冷却装置、起动装置、蓄电装置等) 应与塔式起重机工作状况和环境相匹配。如工作环境温度较低,应具有冷起动性能。
7电气
7.1通则
塔式起重机电气系统应符合GB 5226.2和本标准的规定。
注:GB 5226.2中的“载荷保持装置”即本标准中的“取物装置”,取物装置包括吊具。
7.2电气设备的工作环境
7.2.1环境温度
塔式起重机电气设备应能保证在其运行场所的环境温度范围内正常T作。当环境温度不能满足所 选电气设备工作要求时,应釆取冷却或加温措施。
7.2.2湿度
当最高环境温度为40 °C下的相对湿度不超过50%时,电气设备应能正常工作;温度较低时相对湿 度可较大(例如+ 20 OC时可为90%)O当环境温度不超过+ 25 °C时,应允许相对湿度短时达到100%。
应考虑到由于温度变化可能偶然发生的凝露现象。
7.2.3海拔
一般塔式起重机的电气设备使用的海拔不超过IOOO m。塔式起重机若用于海拔1 000 m以上,其 电气设备的具体数据由相应的产品标准规定,电动机功率的修正见7.5.2.3o
7.2.4防油滴
任何润滑系统、液压系统或其他含油装置在运行和安装时,应保证不会有油滴到电气设备上,否则 电气设备应加以保护。
7.3 电源
7.3.1塔式起重机采用380 V、50 HZ三相交流电源,应采用TN-S接零保护系统(俗称三相五线制)供 电。根据用户要求也可以采用其他参数的三相交流电源.其配电线路设计应符合相关的标准。
7.3.2 在正常工作条件下,供电系统在塔式起重机馈电线接入处的电源波动不应超过额定值的 ±10%。
7.3.3塔式起重机宜装设可切断所有电源的主隔离开关,开关应可锁定于断开位置.并尽量靠近总供 电控制屏(柜)或集电器。
7.3.4 控制电压应选择下列等级:
交流:380 V.220 VJ27 V、48 V、36 V、24 V;
直流:22O VaIo V、48 V、24 VJ2 Vo
控制电源由变压器提供时,二次侧电压不应超过250 V;变压器的二次侧公共端应可靠接地,变压 器的公共极不应被任何开关、触点或断路器(熔断器)隔断,同时应釆用适当措施,防止非公共极线路的 超载或短路。
7.3.5对于行走式塔式起重机,其电源线应通过能自行卷放的电缆卷筒引入。电缆卷筒的最小直径应 大于电源电缆允许的弯曲直径。一般情况下,电缆外径小于21.5 mm时,卷筒的最小直径至少是电缆 外径的10倍;当电缆外径大于21.5 mm时,卷筒最小直径至少是电缆外径的12.5倍。电缆卷筒的集电 环应满足相应的电压等级和电流容量的要求。每个滑环至少配有一对电刷,电刷的接触电压降应小于 1.5 V,电流密度一般取15 A∕cπ√〜20 A∕cm2o电刷的防护等级不低于IP54o
7.3.6电缆铜芯承受的最大拉应力不应超过20 N∕mm2o
7.4控制系统及操纵装置
7.4.1通则
控制系统应满足各机构工作速度的要求,包括机构起动和制动加减速度的要求。
7.4.2起升机构控制系统的设计原则
起升机构控制系统应根据下列原则进行设计:
a) 塔式起重机在110%的额定载荷下应能可靠工作;
b) 在供电系统电压波动为额定值的一 10%时起升额定载荷,无论载荷处于什么位置,系统应保 证机构正常工作;
C)除非预定的控制方案允许,否则无论控制手柄处于什么位置,正常工作时额定载荷下降速度不 应超过额定速度的120%;
d)具有机械换挡或电磁换挡的起升机构,其控制电路中应有防止司机误操作的保护措施。
7.4.3对各机构控制系统的设计原则
对塔式起重机的各个机构,两个方向的起动和停机应渐进控制。
7.4.4操纵装置
操纵装置优先采用联动操纵台。操纵台的布置应符合GB/T 24817.3,并应设置在紧急情况下可迅 速断开总动力电源、停止所有运动的红色急停按钮。急停按钮应是非自动复位式的,并设置在司机操作 方便的地方。
7.4.5遥控装置
地面有线操纵装置,其控制所有机构动作的按钮、开关等操作元件应是自动复位式的。除操作元件 外,还应设有能切断总电源的红色急停按钮,此按钮应是非自动复位式的。
该装置应具有良好的绝缘性能,对于金属外壳或直接能触摸到的金属零件应单独接地。其外壳防 护等级,室内作业时不应低于GB 4208规定的IP43,室外作业时不应低于IP54o
悬挂控制装置应采取有效措施,防止电缆在悬挂时承受过大的拉力。
地面控制的塔式起重机,大小车运行机构空载速度不应超过50 m/minO
无线遥控器的防护等级,室内使用时不应低于GB 4208规定的IP43,室外使用时不应低于IP54o
无线控制装置和控制系统应按GB 5226.2—2002的9.2.7进行设计,并满足附录U的附加要求。
采用无线遥控方式的塔式起重机还应同时满足国家有关安全规程规定的要求。
7.4.6多点控制
塔式起重机要求多点控制时,各控制点间应相互联锁,任一时刻只允许一个控制点工作。每一控制 点均应装设能切断总电源的红色急停按钮,且操作任一急停按钮,所有的控制点都应无法工作。
7.4.7制动器的控制
7.4.7.1与电动机同时控制的制动器,其线路应设有保护装置,在岀现故障时能迅速切断电动机和制动 器的电源;如电动机接至制动器的导线长度不大于5 m,制动器可不单独设这样的保护。与电动机分开 控制的制动器,其控制应釆取预防措施,以使起动和制动时不岀现任何失控的运动。
7.4.7.2如有电气制动,机械制动应在电气制动之后作用。电动机通电时制动器不得制动,短暂过渡状 态除外。
7.4.7.3对设有安全制动器的起升机构,在正常作业时,其支持制动器动作后,安全制动器如需动作应 延时进行,且其延时动作时间应可调;在进行紧急制动时,安全制动器应立即动作。
7.4.7.4对于系统意外断电时制动器的动作会引起机械设备损坏倾翻的情况,应采取适当措施保证意 外断电时制动器的安全动作过程。
7.5电动机
7.5.1电动机选择依据
电动机应依据类型及结构型式、供电型式、功率、工作制、接电持续率、额定转矩、堵转转矩和最大转 矩、额定转速、调速方式、防护等级、环境温度及湿度、海拔等因素来选择。对于有特殊要求的电动机(如 空载超速,特殊防护和特殊保护等)应向制造商另行提出。
7.5.2电动机选型说明
7.5.2.1电动机的型式
塔式起重机用电动机的型式应符合L∙l的要求。
7.5.2.2防护等级
7.5.2.2.1电动机外壳防护等级应符合GB/T 4942.1的规定,室外使用时,防护等级不应低于IP44o在 可能出现冷凝水的情况下,应确保冷凝水出水孔畅通。
7.5.2.2.2电动机在有专门的外部防护措施时,可釆用较低的防护等级。
7.5.2.3根据环境温度和海拔的修正功率
当电动机使用地点的海拔超过1 000 m和/或使用环境温度与其额定环境温度不一致时,其输岀功 率应按实际使用地点的海拔和使用环境温度进行修正,见式(126)0
P'n=⅞s ........................( 126 )
1\
式中:
p'n—根据环境温度和海拔修正后用来选用电动机的功率,单位为千瓦(kW);
PN—未修正的所需电动机的功率,单位为千瓦(kW);
K——功率修正系数,按图24确定。
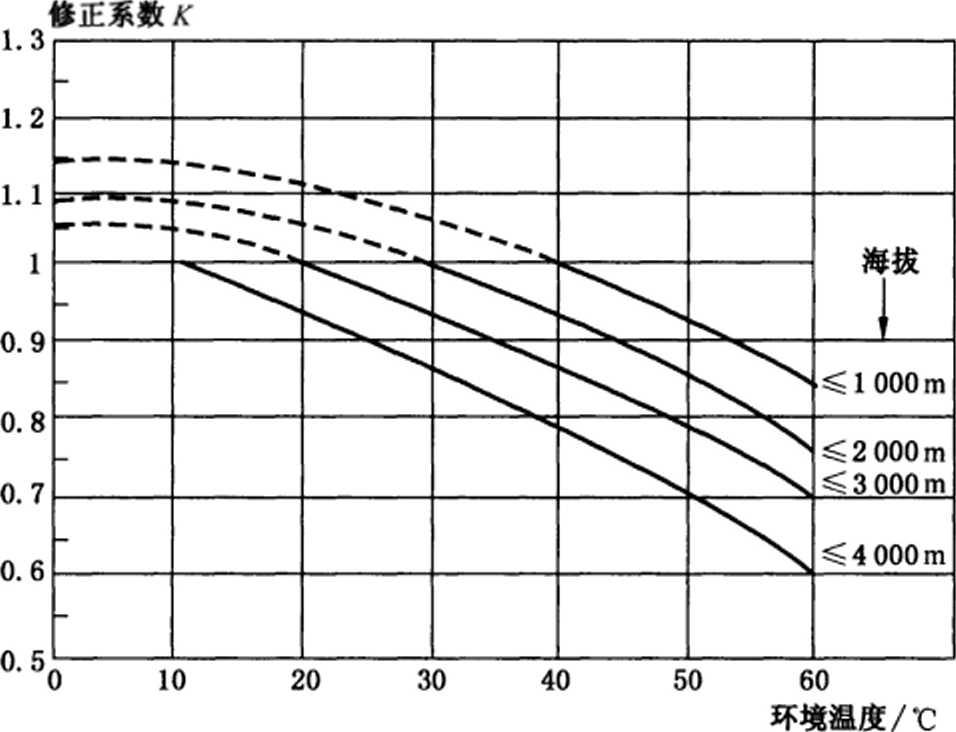
注1:修正系数K>l的值,由电动机制造商和塔式起重机制造商共同确定。
注2:海拔大于1 OOom时,需要指出环境温度。
图24以环境温度和海拔为函数变置的功率修正系数值
7.5.2.4接电持续率和每小时工作循环数
接电持续率JC值用于工作循环时间小于或等于10 min的场合,由式(127)确定。
JC = -X 100 % ........................( 127 )
t
式中:
i—在塔式起重机一个工作循环中该机构的运转时间;
t―塔式起重机一个工作循环的总时间。
塔式起重机各机构的接电持续率JC值、CZ值、稳态负载平均系数G,是影响电动机发热的重要因 素,应根据实际载荷情况计算,并在塔式起重机制造商和买方之间达成一致意见。如无法获得载荷情况 的详细资料,可参考表M.1选取。
7.6电气元件
7.6.1制动器的电驱动元件
制动器的电驱动元件应按电源电压、频率、使用环境条件及对应机构的工况(接电持续率,每小时动 作次数等)来选定。
7.6.2电阻器
7.6.2.1接电持续率不同的电动机,宜选用不同参数的塔式起重机通用电阻器;接电持续率虽不同但又 相近时,允许选用同一规格的电阻器。
7.6.2.2起动用电阻器各级电阻选用值与计算值允差±5%;个别级的电阻器选用值允差士 10%,但各 相总电阻选用允差不应超过±8%。
7.6.2.3 塔式起重机用电阻器为重复短时工作制,一循环周期为60 s,其接电持续率分为4.4%. 6.25%、8.8%、12.5%、17.5%、25%、35%、50%、70%、100%。各级电阻的容量应按不同的接入时间长 92
短来选择。
7.6.2.4同一电阻元件,在不同接电持续率时有不同的允许电流值,该值不应小于电动机的工作电流, 为了减小电阻器箱数,个别级别选用电阻元件的允许电流值可比电动机工作电流小5%。
7.6.2.5晶闸管定子调压调速系统电阻器的接电持续率按100%选用,上升和下降用电阻元件在JC = 100%下的电流值,不应小于当电动机带额定负荷时上升和下降分别对应的电动机的工作电流。
7.6.2.6变频调速系统采用制动单元时,起升机构电阻器的接电持续率应按100%选用,电阻器的功率值不 应小于下降时的额定回馈功率;其他机构电阻器的接电持续率和功率值取决于机构的制动频度与制动转矩。
7.6.2.7电阻器应加防护罩,室内使用时其防护等级不应低于GB 4208规定中的IPlO,室外使用不应 低于IP13β
7.6.3接触器
接触器应符合GB 14048.4的要求。接触器应按其工作电流及预期使用寿命根据生产厂提供的选 用曲线进行选用。对于使用频繁、工况较为复杂的接触器容量选大一级使用为宜。
换向接触器和其他同时闭合会引起短路事故的接触器之间,应设置电气联锁或机械联锁。
7.6.4可编程序控制器
可编程序控制器一般根据开关量的输入输出点数和电压等级,模拟量输入输岀点数及其他特殊功 能要求进行设计选型,如有特殊要求,可釆用冗余系统。可编程序控制器应按照制造商的说明书安装。 对用于安全保护的联锁信号,如超速限制等,应具有直接的继电保护联锁线路。
7.7电线电缆
7.7.1 一般规定
移动的电源电缆应选用重型橡套电缆。其他外露的连接电力的电缆至少应选用中型橡套电缆。
7.7.2电线电缆截面选择
7.7.2.1导线截面应根据导线所承受的负载电流、线路允许的电压降、工作环境温度和敷设方式所要求 的机械强度来确定。
7.7.2.2塔式起重机外部连接用电线电缆截面选择:对于多股单芯导线,截面不应小于1.5 Tnm2 ;对于 多股多芯电缆,截面不应小于1.0 mm2;对于电子装置、油压伺服机构、检测与传感元件的连接线,其截 面不作规定。
7.7.2.3导线截面积根据导线载流量不小于导线负载电流并考虑最大允许电压降来决定,参见附录TO
7.7.3导线的敷设
7.7.3.1控制屏(柜)内的连接线可敷设于线槽中,导线两端应设有与电气原理图一致的编号标记(或工 艺编号)。
7.7.3.2外部连接导线可敷设于线槽、金属管或软管中,电缆可直接敷设。在有机械损伤、化学腐蚀、油 污侵蚀的地方,电缆应有防护措施;线槽、导线管的出口处,应防止磨损电缆。
7.7.3.3固定敷设的电缆,其弯曲半径不得小于5倍电缆外径,至少不应低于制造商提供的相应数据。 除电缆卷筒以外,移动电缆的弯曲半径不得小于8倍电缆外径。塔身悬挂电缆的固定,宜使用电缆网套 悬挂方式,每20 m设置一个电缆网套。
7.7.3.4电缆需加长时,应设置中间接线盒,接线盒固定在便于检修的地方。接线盒内应采用标准接线 端子,其容量应满足导线载流锹的要求,并有与导线相同的编号。接线盒的防护等级应适合周围环境, 且不低于IP44o
7.7.3.5三相或单相交流电源线应穿在同一根导线管内。
7.7.3.6对于控制屏(柜)、接线箱等电气设备的接线端子,若接线端子间的意外连接会造成设备损坏 时,应将相关端子明显区分或标示。
7.7.4电压损失 7.7.4.1尖峰电流
对于交流供电,在尖峰电流时,自供电变压器的低压母线至塔式起重机任何一台电动机端子上的总 电压损失不应超过额定电压的15%。
7.7.4.2交流电导线电压降
忽略导线单位长度的感抗时,导线电压降按式(128)计算。
√3Ucosφ ........................(I28)
ɔ /
式中:
△U ——导线的电压降,单位为伏特(V);
L —导线有效长度,单位为米(m);
I —最大工作电流,单位为安培(A),见7.7.4.3;
COS甲——功率因数,见7.7.4.4;
S ——导线截面积,单位为平方毫米(mn√);
7 —导线电导率,单位为米每欧姆平方臺米[m∕(Q・mm2)L铜取50 m∕(Ω・mm2)O
7.7.4.3最大工作电流
单台电动机的最大工作电流为设计选定的最大起动电流。对于绕线转子电动机一般取2.2/n〜
2.5 In,对于变频控制的笼型电动机一般取为1.5 IN〜L8 In,对于直接起动的笼型电动机参照电动机 产品样本数据査取。IN为电动机的额定工作电流。
单台塔式起重机的最大工作电流,按功率最大机构的电动机处于起动状态,其余可能同时工作机构 的电动机处于额定工作状态时的电流进行计算,见式(129)o
一般考虑三个机构同时工作的情况。
(129 )
ImaX =K INI +【N2 + ʃ N3
式中:
ImX —塔式起重机最大工作电流,单位为安培(A);
K —功率最大机构电动机的起动电流倍数;
1而、IN2、lN3——三个机构电动机在额定载荷下的额定工作电流,单位为安培(A)。
7.7.4.4功率因数
计算电压降时,电动机起动时的功率因数cosφ 一般选用下列值:
—对于绕线电动机≡cosφ =0.65;
—对于变频调速笼型电动机icosφ = 0.8-0.82;
——对于直接起动笼型电动机χcosφ = 0.5o
7.7.4.5导线载流■校正
导线载流量IX按式(130)校正计算:
IX =KaKIKJlK ........................( 130 )
式中:
IX ——导线载流量,单位为安培(A);
Ka——导线或穿管导线多根并列敷设校正系数;
KI——环境温度校正系数;
Kj ―重复短时工作制的接电持续率校正系数;
IK —电线电缆载流量的基准值,单位为安培(A)。
各载流量计算系数参见附录T。
7.8控制屏(柜)
7.8.1基本要求
7.8.1.1控制屏(柜)的结构应能满足工作环境的要求(振动、冲击等),塔式起重机控制屏(柜)应采用防 护式结构。在无遮挡的场所安装使用时,其外壳防护等级宜不低于GB 4208中的IP4X;在有遮挡的场 所安装使用时,其外壳防护等级可适当降低。
7.8.1.2控制屏(柜)内元件布置应保证有足够的拆修距离和电气元件要求的安全距离。同时各元件动 作产生的热量、电弧、振动、磁场不得影响其他元件正常功能的发挥,不得引起误动作。
7.8.1.3控制屏(柜)的金属壳体(包括柜门)应有保护接地螺钉(或螺母),并在明显处标志保护接地符 号;门应可锁住。
7.8.2安装要求
7.8.2.1控制屏(柜)应安装牢固,箱壳和箱柜前应保持至少400 mm的净空,地面应无障碍物,以便于 检修工作。
7.8.2.2控制屏(柜)应具有便于吊装的设施(吊环等)。
7.9电气保护
7.9.1电动机的保护
电动机应具有如下一种或一种以上的保护功能,具体选用应按电动机及其控制方式确定:
a) 瞬动或反时限动作的过电流保护,其瞬时动作电流整定值应约为电动机最大起动电流的 1.25倍;
b) 在电动机内设置热传感元件;
C)热过载保护。
7.9.2线路保护
所有外部线路都应具有短路或接地引起的过电流保护功能,在线路发生短路或接地时,瞬时保护装 置应能分断线路。对于导线截面较小,外部线路较长的控制线路或辅助线路,当预计接地电流达不到瞬 时脱扣电流值时,应增设热过载保护功能,以保证导线不会因接地而引起绝缘烧毁。
7.9.3错相和缺相保护
电源电路中应装设错相及缺相保护装置。
7.9.4零位保护
塔式起重机各传动机构应设有零位保护。初始供电以及运行中因故障或失压停止运行后重新恢复 供电时,机构不得自行动作,应人为将控制装置置回零位后,机构才能重新起动。
7.9.5失压保护
当塔式起重机供电电源中断后,凡涉及安全或不宜自动开启的用电设备均应处于断开状态,避免恢 复供电后用电设备自动运行。
7.9.6欠压及过压保护
为保证正常工作,应设置欠压及过压报警装置。当电压低于O∙85Ue和高于l.lUe(l"为电源额定 电压值)时,应报警或自动切断电源电路。
7.9.7 电动机保护
因正反向接触器故障导致电动机定子异常失电,或因调速装置故障导致电动机失控时,制动器应立 即制动。
7.9.8超速保护
对于非平衡式变幅机构应设置超速开关,超速开关的整定值取决于控制系统性能和額定下降速度 (或设计允许值),通常为额定下降速度的1.25倍〜1.4倍,超速保护应激发适当的控制响应。
7.9.9避雷保护
对于安装在野外且相对周围地面处在较高位置的塔式起重机,至少应按GB/T 23723.3的规定 接地。
7.9.10限制器和指示器
塔式起重机应按GB/T 24810.3的规定配备限制器和指示器。
7.9.11塔式起重机运行状态数据记录装置
塔式起重机宜根据使用需要和有关规定配备运行状态数据记录装置,运行状态数据记录装置宜符 合GB/T 28264的相关规定。
7.9.12其他保护
7.9.12.1应在司机操作方便的地方设置紧急情况下可以迅速断开总电源的红色急停按钮。
7.9.12.2带涡流制动的起升控制线路,应具有涡流电流检测功能,防止因涡流回路故障而造成吊具 滑降。
7.9.12.3直流他激电动机应有失磁保护。
7.9.12.4在塔式起重机上的电气控制设备中,人可能触及的带电裸露部分应设有防止触电的防护 措施。
7.9.12.5当塔式起重机的总高度大于30 m时,应在其端部、顶部装设红色障碍指示灯,其供电应不受 停机影响。
7.10接地
7.10.1所有电气设备正常不带电的金属外壳、金属管线、安全照明变压器低压侧等均应可靠接地。当 电气设备直接固定在金属结构件上并有可靠电气接触时,可不必另装电气连接线。
7.10.2接地线及用作接地设施的电导,一般不小于本线路中最大的相电导的1/2。
7.10.3接地线与设备的连接可用螺钉连接或焊接。螺钉连接应采取防松和防锈措施。
7.10.4接地线严禁作载流零线。
7.11照明、信号、通讯
7.11.1照明
7.11.1.1司机室应提供固定的、不炫目的工作照明装置,该装置应布置合理,并具有不小于30 IX的照 度,在塔式起重机司机室主电气线路被切断时,照明装置应能正常工作。
7.11.1.2固定式照明装置的电源电压不应超过220 V,严禁用塔式起重机的金属结构作为照明线路的 回路。
7.11.1.3可携式照明装置的电源电压不应超过50 Vo
7.11.1.4塔式起重机应设单独的照明变压器。照明变压器应是隔离变压器,禁止采用自耦变压器,照 明变压器二次侧一端应接地,照明线路总电源开关应设置断路器及漏电保护开关。
7.11.2信号
7.11.2.1司机室至少应具有下列信号指示:
a) 总电源开合状态指示信号;
b) 超过设定风速的报警或指示信号(对于配备了风速仪的塔式起重机);
C)超起重量和超起重力矩报警或信号指示。
7.11.2.2行走式塔式起重机在行走过程中应具有警示措施。
7.11.2.3信号可以是灯光、音响或仪表指示。信号装置应设置在操作人员或现场人员视力听力可及的 地方。
7.11.3通讯
根据用户的要求选配通讯设备,通讯设备可选用无线电对讲机等。
7.12其他
7.12.1司机室内如配置取暖用电热器,应采用固定式防护。
7.12.2 若设置有操作、检査、维护人员乘用的升降机,其电气设计及安全设施应符合GB 26557的 规定。
7.12.3对在特殊环境和特殊工况下使用的塔式起重机的电气设计和选用的电气元件应满足相应的特 殊要求。
附录A
(资料性附录)
塔式起重机的起升状态级别举例
塔式起重机的起升状态级别举例见表A.l0
表AJ 各类塔式起重机的起升状态级别举例
|
塔式起重机类型 |
用途 |
起升状态级别 |
|
1 |
不经常使用的塔式起重机 |
HCJ |
|
货场用塔式起重机 |
HCl | |
|
钻井平台维修用塔式起重机 |
HC2 | |
|
船舶修理厂用塔式起重机 |
HC2 | |
|
2 |
建设用自行架设式塔式起重机 |
HC1, HC2 |
|
建设用组装式塔式起重机 |
HCi, HC2 | |
|
3 |
造船厂飯装用塔式起重机 |
HCl, HC2 |
|
港口集装箱装卸用塔式起重机 |
HC2 | |
|
造船用塔式起重机 |
HC2 | |
|
抓斗塔式起重机 |
HC3 | |
|
注:对于起升机构控制系统能自动保证平稳起、制动的塔式起重机,其起升状态级别可比表中列示的起升状态级 别低1级(如HC3可降为HC2,HC2可降为HC1 )β | ||
附录B
(规范性附录)
空气动力系数
B.1总则
由理论方法或实验方法得出的先进和公认的空气动力系数值,都可使用。
B.1.1构件的空气动力系数
构件的空气动力系数C按式(B.1)计算。
C==CO X Ψ ........................( B.1 )
式中:
CO —无限长直的等截面构件的空气动力系数。具有一个或多个实心截面或一个空心截面的构 件称为单根构件;平面或空间格构式结构件可由单根构件组合而成。
Ψ ——折减系数,为适合有限长构件而折减C。。。与单根构件的空气动力长细比人有关;如果是 格构式构件,小还与其充实率φ有关。
≠>λ和甲之间的关系见图B.lo

图B.1折减系数W与空气动力长细比人、结构充实率。之间的关系
B.1.2空气动力长细比
空气动力长细比人按式(B.2)计算。
λ =ItJd ........................( B.2 )
式中:
λ ―空气动力长细比;
d—构件的特征尺寸,单位为米(m),见本附录的各个表格;
IU——构件的空气动力长度,单位为米(m),按式(B.3)计算。
la≈a×l ........................( B.3 )
式中:
Ia---同式(B.2);
L ——构件长度,即其两节点之间的距离,单位为米(m);如果该构件与其他构件连接,其长度取为 其两端接点中心之间的距离;
α ——相对空气动力长度,与构件的位置和可能靠近构件的挡风阻碍物(如地面、建筑物)有关,见 表 B.1。
B.1.3结构充实率
平面格构式构件的充实率φ按式(B.4)计算。
φ≈^Aj∕Ac ........................( B.4 )
式中:
φ ——平面格构式构件的充实率;
∑A>—单根构件及其节点板在格构式结构件平面上的投影面积的总和,单位为平方米(m?),见 >
图 B.2;
A, ——格构式结构件的轮廓面积,单位为平方米(m2),Af= d X Z,见图B.2。
注:空间格构式构件的充实率即为其迎风一面的格构式结构的充实率。
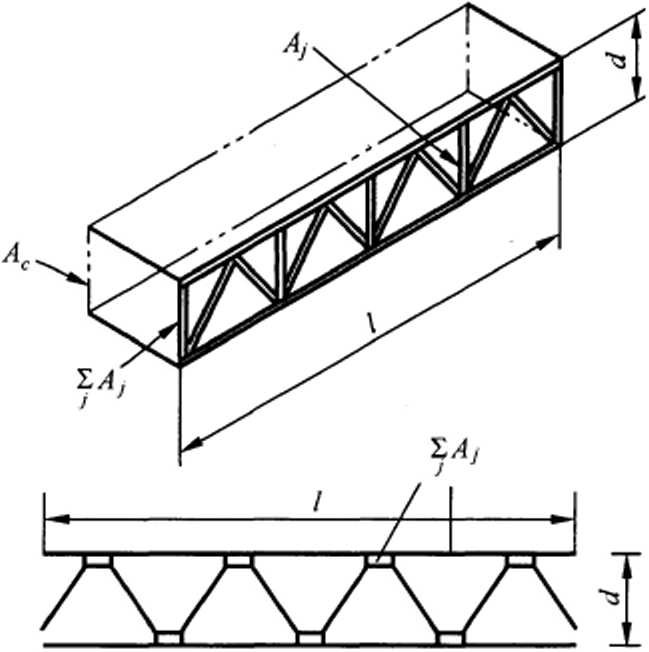
图B.2格构式结构件示例
表BJ单根构件和格构式构件的相对空气动力长度ɑ
|
构件和阻碍物迎风的位置• |
a | ||||
|
1 |
1 | ||||
|
3 | |||||
|
. I . | |||||
|
2 |
OC | ||||
|
. / L | |||||
构件和阻碍物迎风的位置•
|
7/ |
,〃〃/〃〃〃////〃, |
7. |
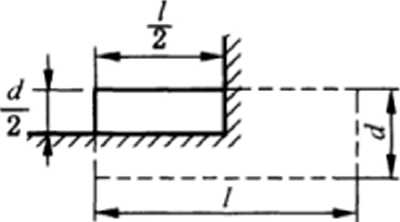
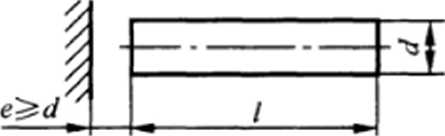
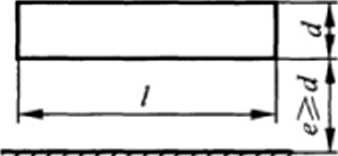
〃〃〃〃/〃〃〃///,
表B.1 (续)
a) 非圆形构件:
Z≤15 m,α = 2∙ O
如算出的人值>70,则取λ = 70
Z≥50 m∙Q= 1.4
b) 圆形构件:
∕≤15 m∙α = 1∙ 0)
如算岀的人值>70,则取λ = 70
∕≥50 m∙α = 0.7 \
15 m≤Z≤50 m时的a值,用/ = 15 m和50 m时的ɑ值按 线性插入法确定,且当算出的义值>70时,取义=70
*逆时针旋转90°也成立。
B.1.4雷诺数
某些单根构件和格构式结构件的空气动力系数与雷诺数Re有关。雷诺数按式(B.5)确定。
Re = 0.667 X IO5 XrUX^d ........................( B.5 )
式中:
Re —雷诺数;
d ——构件的特征尺寸,单位为米(m),见本附录的各个表格;
υ —风速,单位为米每秒(m∕s)O对于工作状态风载荷,应用或勺代替技见4.3.3.1);对于 非工作状态风载荷,应用pft(h)代替m见4.3.4.2)o
B.2单根构件
本章给出了下列图表:
—表B.2:圆形截面单根构件的空气动力系数C。;
——图B.3:与雷诺数Re相关的更准确的圆形截面单根构件的空气动力系数C。;
——图B.4:风向角0及相应的风载荷的定义;
—表B.3:直边单根结构件的空气动力系数C0,X0s;
—表B.4:三角形和矩形空心截面单根结构件的空气动力系数COo
表B.2圆形截面单根构件的空气动力系数CO
|
序号 |
构件的形状与位置 |
待征面积A |
CO | ||
|
构件 |
空气动力长细比 |
风向角B | |||
|
1 |
圆形 |
Z∕J≤∞ |
垂直于构 件轴线 |
d・I |
CO= 1.20 更准确的C。按图B.3选取 |
|
2 |
管、杆件 |
Z∕J>100 |
垂直于构 件轴线 |
d・I |
Re≤2×105, CO= 1.20 |
|
4×105≤Re≤106, CO= 0.70 | |||||
|
Re>106 或 2X 105<Re<4Xl()3 时,C° 按 图B.3确定 | |||||
|
3 |
钢丝绳 |
l∕cl>lQQ |
垂直于构 件轴线 |
d・I |
Re≤2×105, CO= 1.20 |
|
4 XlOyRYIO6, CO= 0.90 | |||||
|
Re>10β或 2×10s≤Re≤4× IO5 BtX0 按 图B.3确定 | |||||
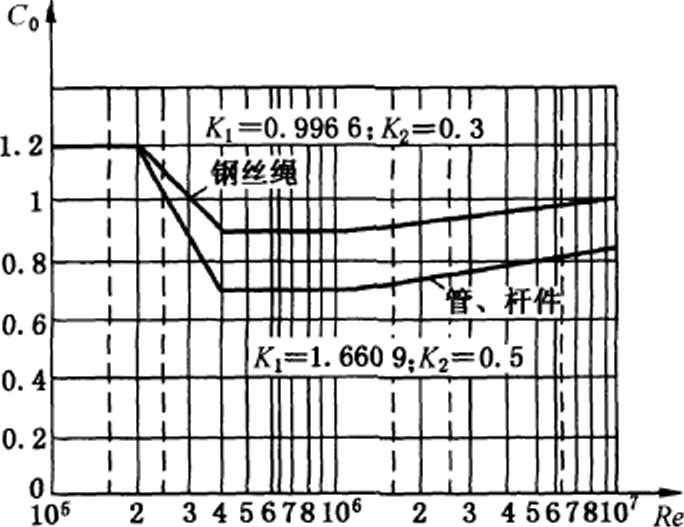
说明:
当 2×105≤Re≤4×105时,C。= 1.2-K, lg[Ke∕<2× IO5)]
式中粗糙度K)的取值如下:
对钢丝绳:Ki =0.996 6;对管和杆件:Kι=1.660 9。
当R日时,c° = L2-E齢冲
式中粗糙度Kz的取值如下:
对钢丝绳:K2=0.3j对管和杆件:K? =0.5;
图B.3与雷诺数Re相关的更准确的圆形截面单根构件的空气动力系数G
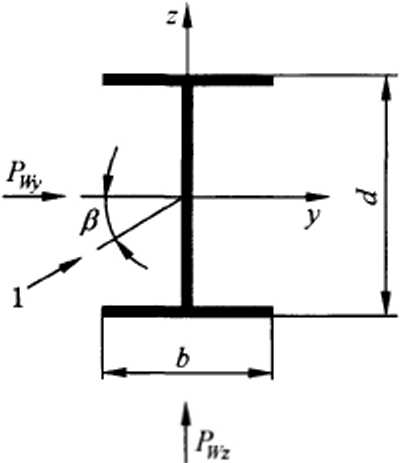
说明:
1——风向。
图B.4风向角P及相应的风载荷的定义 表B.3直边单根构件的空气动力系数C。,、Gh
|
序号 |
构件的形状与位置 |
特征面积A |
COy |
COt | |||
|
构件 |
截面尺寸比值 |
风向角F | |||||
|
1 |
J |
P |
b/dWO.l |
0° |
d・I |
2.0 |
O |
|
±45° |
1.3 |
±0.13 | |||||
|
90o |
O |
0.1 | |||||
|
2 |
ð |
b∣d = 1 |
Oo |
d・Z |
1.65 |
O | |
|
土 45° |
2.2 |
±1.0 | |||||
|
±90° |
1.3 |
2.1 | |||||
|
3 |
b/d = 1 |
Oo |
d・I |
2.0 |
O | ||
|
±45° |
1.15 |
土 0.8 | |||||
|
±90° |
—1.3 |
2.1 | |||||
|
4 |
b/d = 0.5 |
0ξ |
d・I |
2.0 |
1.0 | ||
|
J |
I |
+ 45° |
1.8 |
0.8 | |||
|
B | |||||||
|
≡4? |
1.3 |
—0.2 | |||||
|
90° |
1.75 |
1.25 | |||||
|
5 |
1 |
bld = 0.5 |
θɔ |
d • / |
2.0 |
-0.1 | |
|
+ 45° - |
1.55 |
0.7 | |||||
|
— 45。 |
1.55 |
—0.8 | |||||
|
90° |
-0.25 |
0.8 | |||||
|
6 |
4 |
b/d = 1 |
OZ |
d・Z |
1.8 |
2.0 | |
|
÷45o |
1.8 |
1.8 | |||||
|
90° |
2.0 |
1.8 | |||||
|
7 |
b/d = 1 |
0° |
d ∙ I |
1.9 |
-0.2 | ||
|
÷45β |
1.4 |
1.4 | |||||
|
-45° |
0.7 |
-1.8 | |||||
|
90° |
-0.2 |
1.9 | |||||
表B.3 (续)
序号
构件
构件的形状与位置
截面尺寸比值
O0
bid = 0.9
8
b/d = 0.9
9
10
11
12
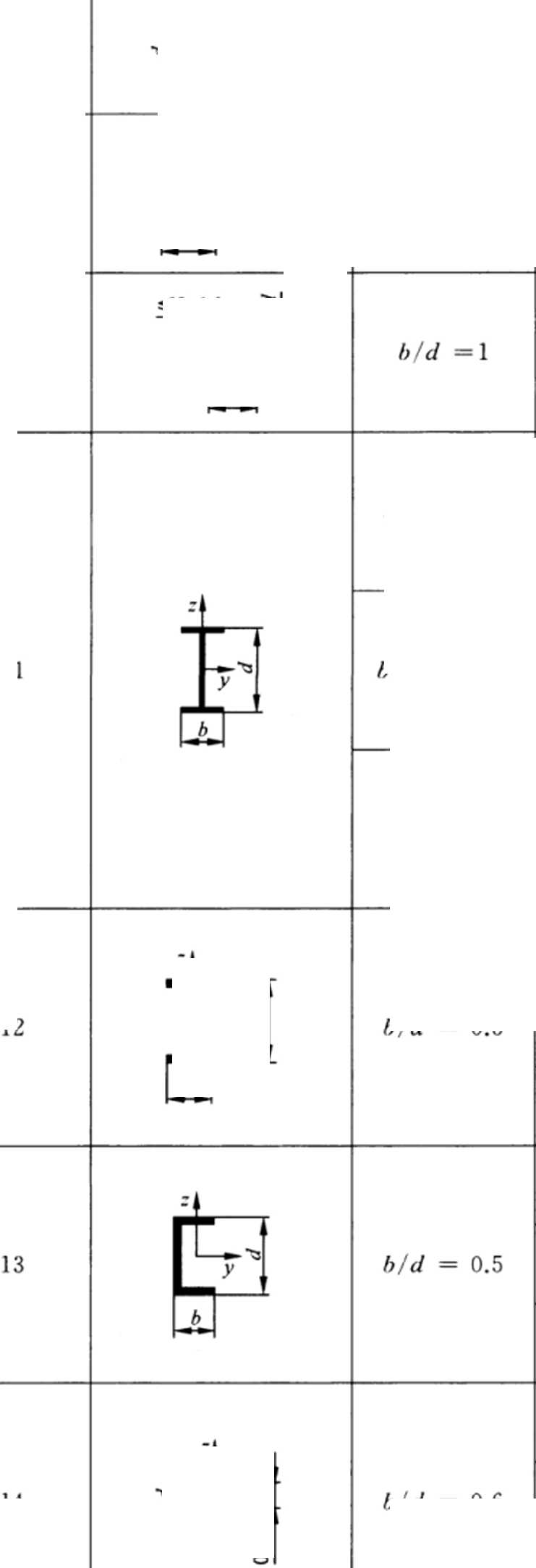
b/d = 0.5
b/d = 0.66
b/d = 1
b/d = 0.6
14
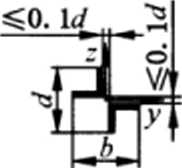
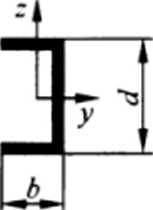
b/d = 0.5
±45°
±90°
±45°
±90°
±45°
90
0°
±45°
±90°
±45°
±90°
±45°
±90°
±45
±90°
±45
±90°
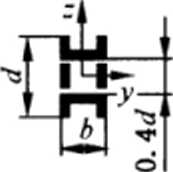
±45°
±90°
特征面积A
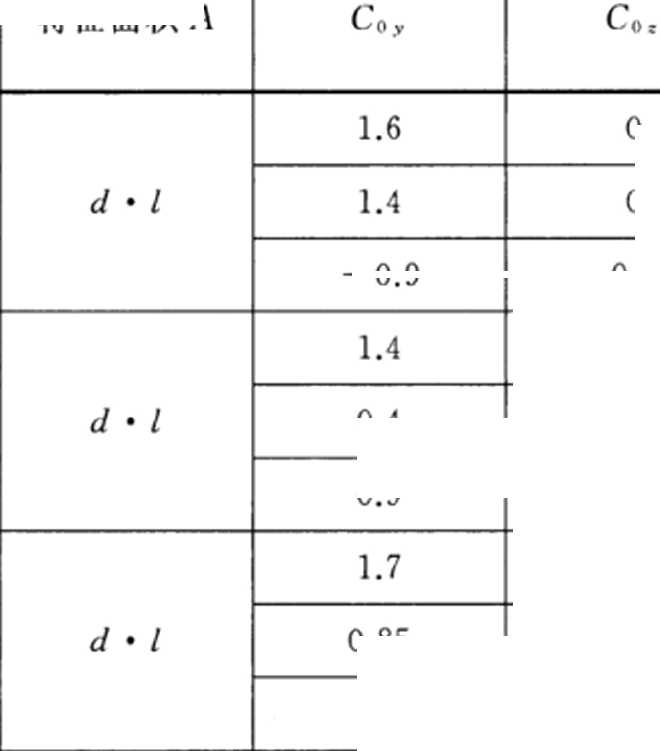
-0.9
0
0
0
±1.0
0
0.85
±0.85
0
0.4
0.9
2.0
1.85
1.5
÷0.6
0.8
±1.0
±1.5
O
d ∙ I
±0.6
C:'
[■)
O
1.8
注:表83给出的风力系数和C∖与结构件截面的y轴和Z轴有关,还与0角所确定的风向有关。
风载荷Pwy.Pwz根据4.3.3.1和434∙2给出Pw∣、PWN的算式计算。见图B.4o
表B.4三角形和矩形空心截面单根构件的空气动力系数Co
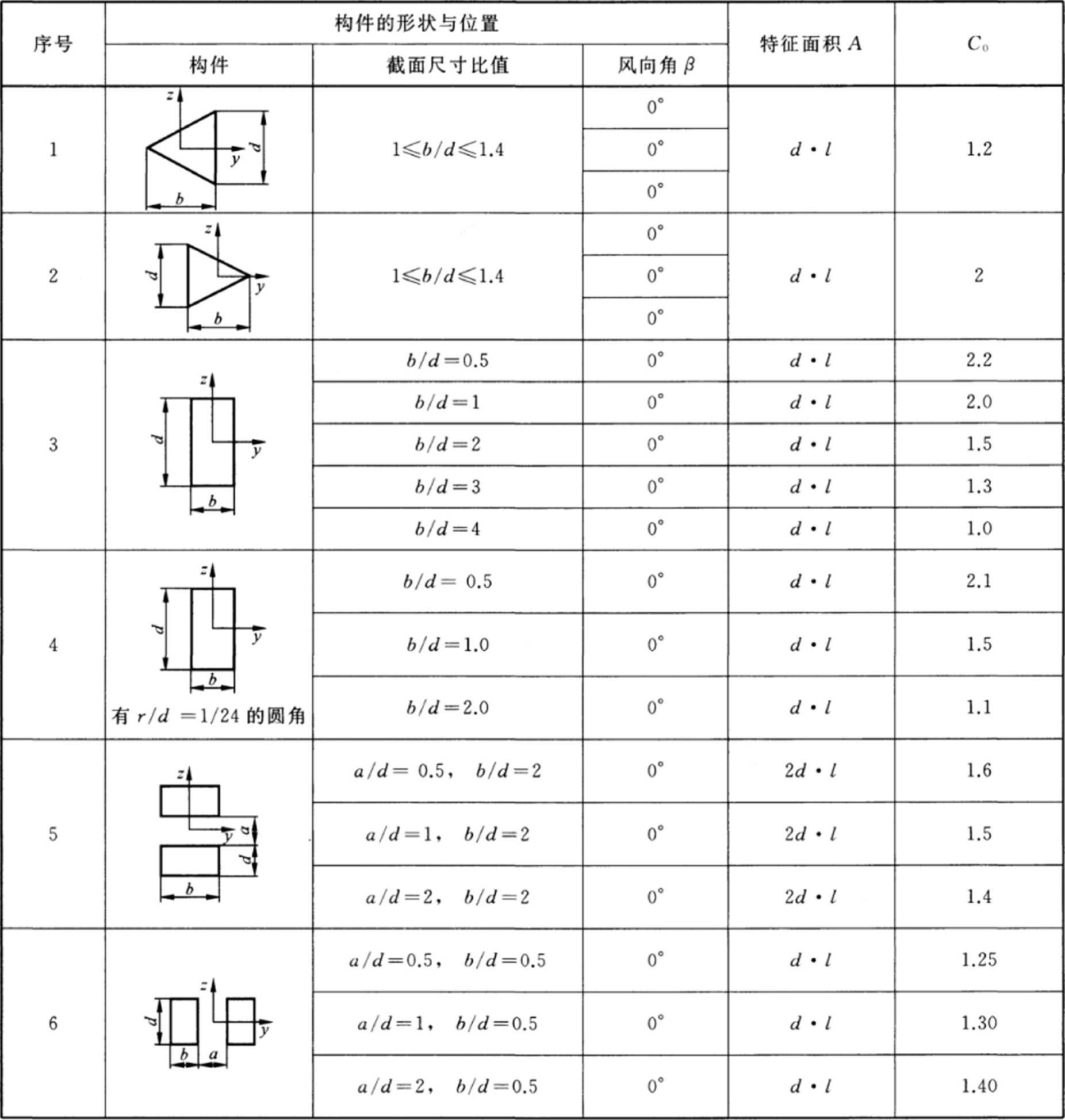
B.3平面和空间格构式构件
本章给出了下列图表:
——表B.5:平面和空间格构式构件的特征面积A和空气动力系数C。;
——图B.5:单根构件为圆形和非圆形的平面格构式构件,其空气动力系数C。与φ的关系;
—图B.6:单根构件为圆形和非圆形的空间格构式构件,其空气动力系数C。与φ的关系;
——图B.7:单根构件为圆形的平面格构式构件,其空气动力系数C。与Re和用的关系;
——图B.8:单根构件为圆形、截面为三角形和正方形的格构式构件,其空气动力系数C。与Re和W 的关系。
表B∙5平面和空间格构式构件的特征面积A和空气动力系数CO
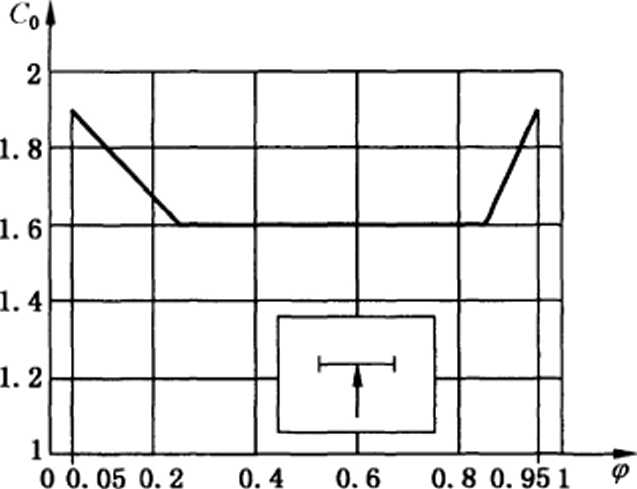
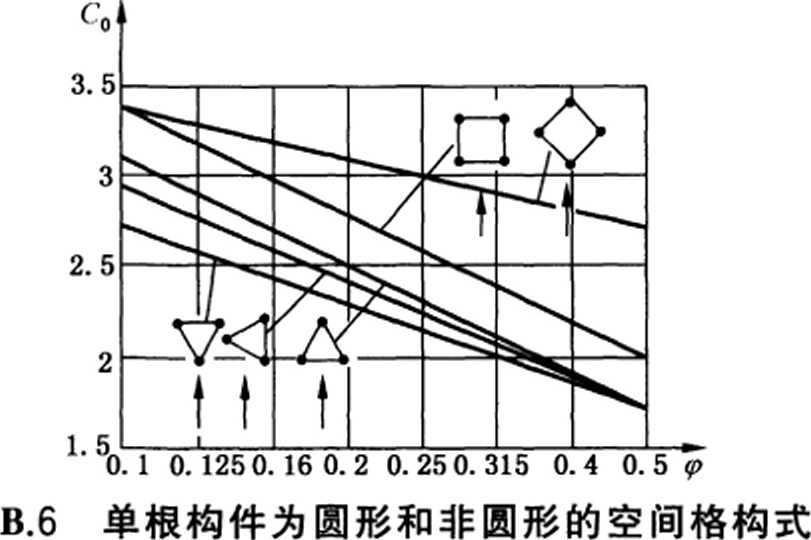
构件,其空气动力系数CO与9的关系
|
序号 |
构件的形状与位置 |
特征面积A |
CO | |
|
1 |
8 |
单根构件:非圆形 |
A = "A,, 0 = j⅜7 ∑A,--个面以)所有单根构件和节 i 点板在其平面上的投影面积 总和 |
平面构件见图B.5, 空间构件见图B.6 |
|
2 |
E |
单根构件:圆形和非圆形 |
A="A,, Ψ = ⅛7 ∑Az —面积总和,同序号1 i |
平面构件见图B.5; 空间构件见图B.6 |
|
3 |
单根构件:圆形(无节点连接板) WI |
A= ∑Ai, = ʌ ∑A,--个面(d)所有单根构件在其 i 平面上的投影面积总和。 Re= 0.667 ∙ IO5 ∙ v ∙ J∣ (见 B. 1.4) |
平面构件见图B.7; 空间三角形构件见图B.8a); 空间正方形构件见图B.8b) | |
|
注 |
:对于单个平面/空间格构式构件,本表给出的A是最终面积,不需再按B.4计算并列布置的结构件的特征 面积。___________________________________________________________ | |||
图B.5单根构件为圆形和非圆形的平面格构式 构件,其空气动力系数Co与Ψ的关系
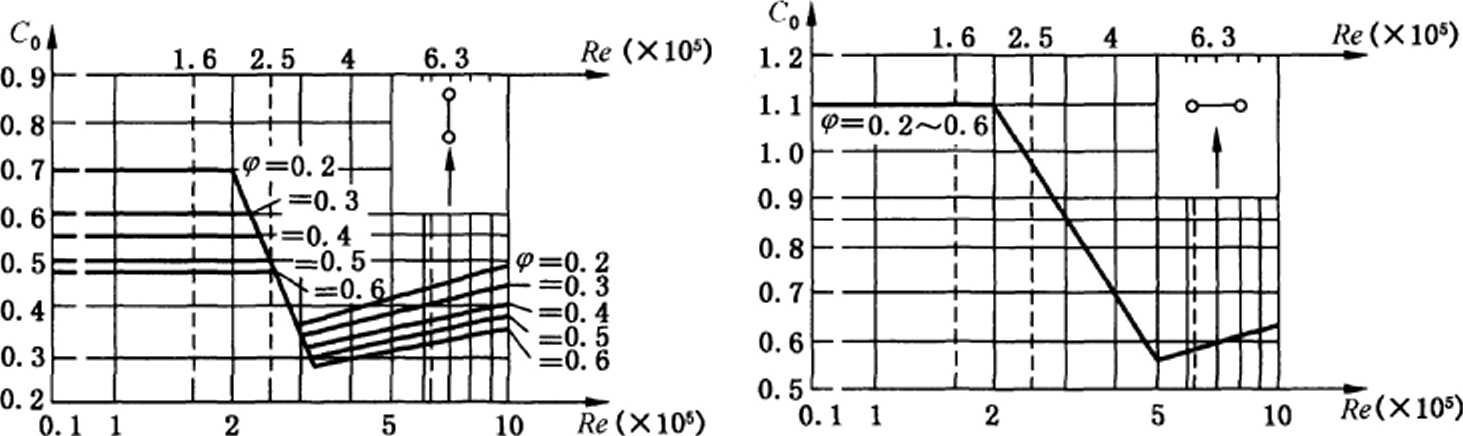
图B.7单根构件为圆形的平面格构式构件,其空气动力系数CO与Re和租的关系
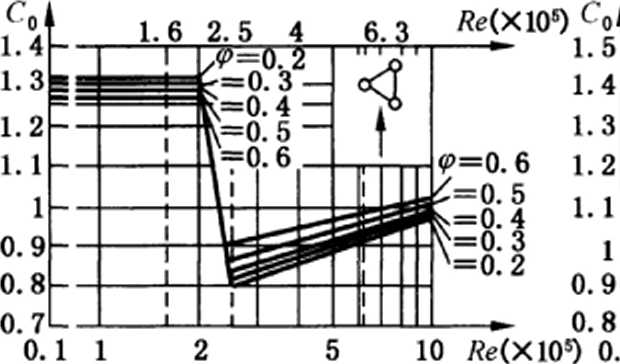
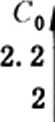
1.8
1.6
1.4
1.2
1
0.8
O.

1.6 2.5 4 6.3 Re(Xlo5)
a)三角形截面
Re(XIO5)
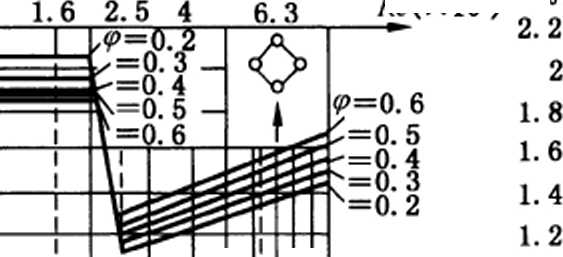
10 Λe(×10δ)
0.8
0.






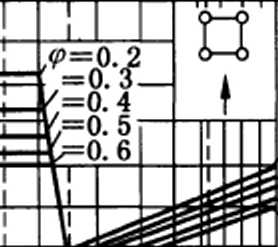
.234 56 =O.0.0.0.0.
2 ====
2 5 10 Re(Xlo5)
b)正方形截面
图B.8单根构件为圆形的空间格构式构件,其空气动力系数Co与Re和<p的关系
B.4并列布置的结构件
本章给出了下列图表:
—表B.6:并列布置的结构件的特征面积A和空气动力系数C。;
——图B.9:并列布置的结构件的挡风系数ηo
表B.6并列布置的结构件的特征面积A和空气动力系数G)
构件的形状与位置
特征面积A
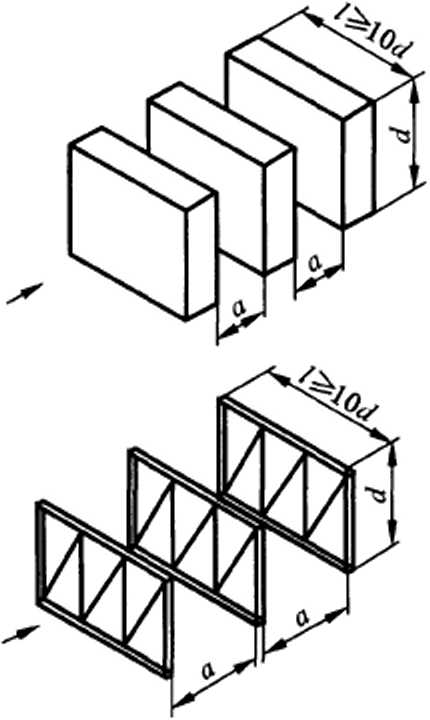
心—平行排列并相同的构件数
如 l≤n≡≤9:
A =-⅛Λ.
如心>9:
A= ɪ+(心一9)rf AI
Ll-V J
此时"20.10。
式中:
Al--个构件的特征面积;
η —挡风系数,取决于结构充实率饥并 与构件间隔与高度之比。/Q有关, 按图B.9取值
一个构件的空气动力系数
下列情况也可使用上述公式:
a) 风速方向偏离垂直于构件表面的方向达到R=5°;
b) 构件的形式不相同,可取其最大特征面积AJmex;
C)构件之间的距离不等,可取其最大距离αmaχo
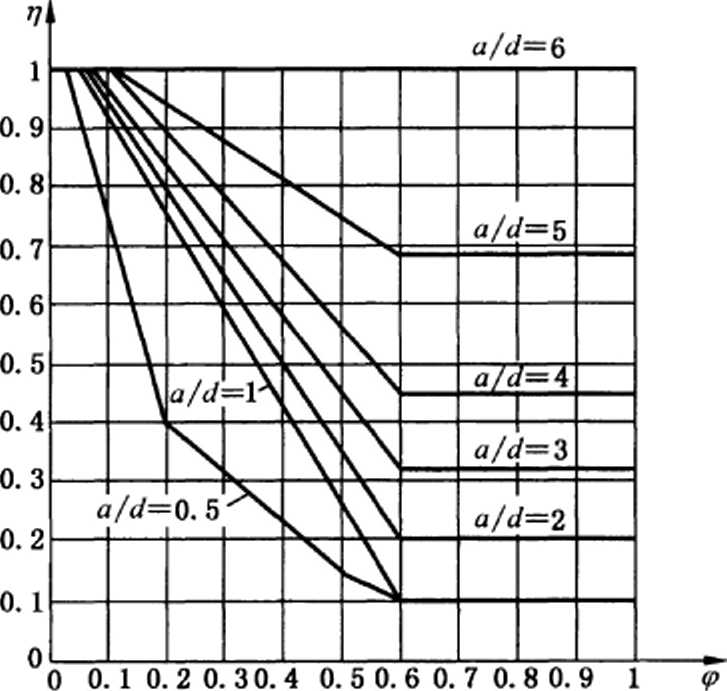
图B∙9并列布置的结构件的挡风系数〃
附录C
(资料性附录) 偏斜运行引起的载荷
C.1通则
本附录适用于估算釆用车轮轮缘导向时偏斜运行引起的水平侧向载荷。
C.2水平側向载荷PS
在实际设计中,偏斜运行时的水平侧向载荷Ps可按式(C.1)作简化计算。
Ps==∑P .义
........................(C.1 )
式中:
PS ——偏斜运行时的水平侧向载荷,单位为牛顿(N);
∑P——承受侧向载荷一侧的端梁上与有效轴距有关的相应车轮经常出现的最大轮压之和[与小 车位置有关,见图C.la)、图C.lb)及图C.3],单位为牛顿(N),不考虑各种动力系数们;
M ——水平侧向载荷系数,与起重机跨度S和起重机基距B(或有效轴距Q)的比值S∕B(S∕a)
有关,按图C.2确定。
注:因为许多起重机在起吊额定载荷时小车并不位于桥架端部的极限位置,因此用“最大轮压"来计算偏斜运行侧 向载荷比较合理、简明、符合实际情况。此外,用于计算偏斜运行水平侧向载荷的“最大轮压”是“静轮压”,不考
虑动力效应。
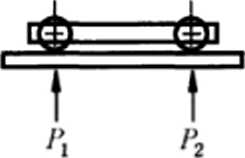
4=*(4+佐以
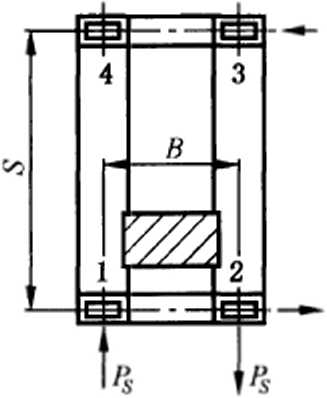
a)
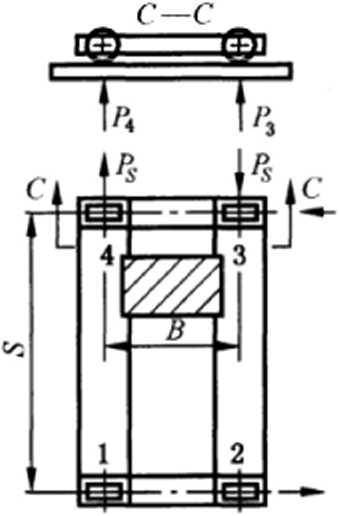
b)
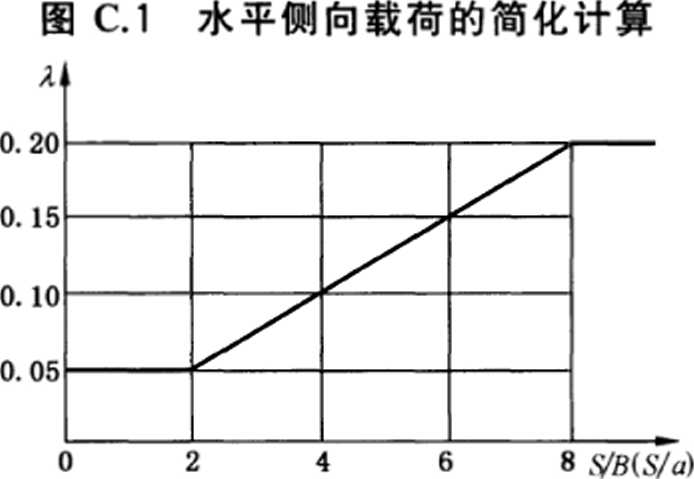
图C2水平侧向载荷系数人
C. 3多车轮系统的有效轴距
在多车轮的起重机中,用起重机有效轴距。代替起重机的基距B进行水平侧向力的计算更为合 理,此有效轴距〃按下述原则确定:
a) 一侧端梁上装有两个或四个车轮时,有效轴距取端梁两端最外边车轮轴的间距见图C.3a)、 图 C.3b);
b) 一侧端梁上的车轮不超过八个时,有效轴距取两端最外边两个车轮中心线的间距见图C.3c)、 图 C.3d);
C) 一侧端梁上的车轮超过八个车轮时,有效轴距取端梁两端最外边三个车轮中心线的间距见图
C.3e);
d)端梁上是用球皎链接的多车轮台车时,有效轴距为两钗链点的间距(水平偏斜侧向载荷按一 侧全部车轮最大轮压之和计算)。
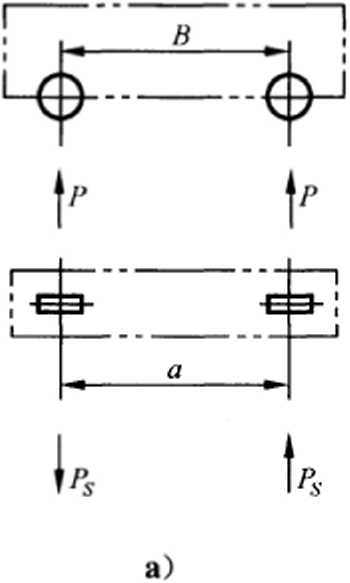
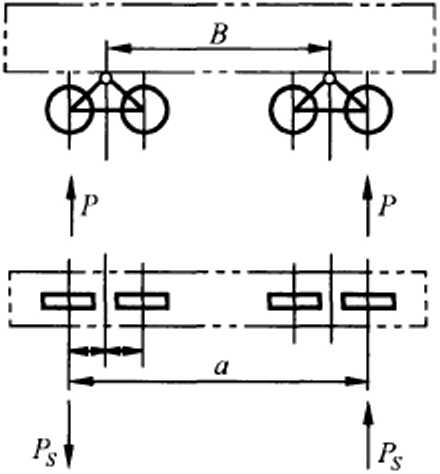
b)
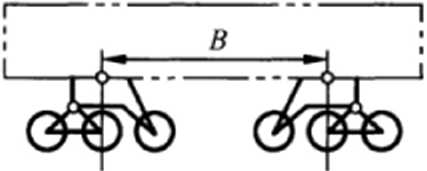
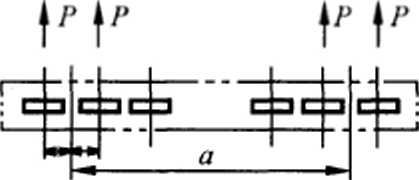
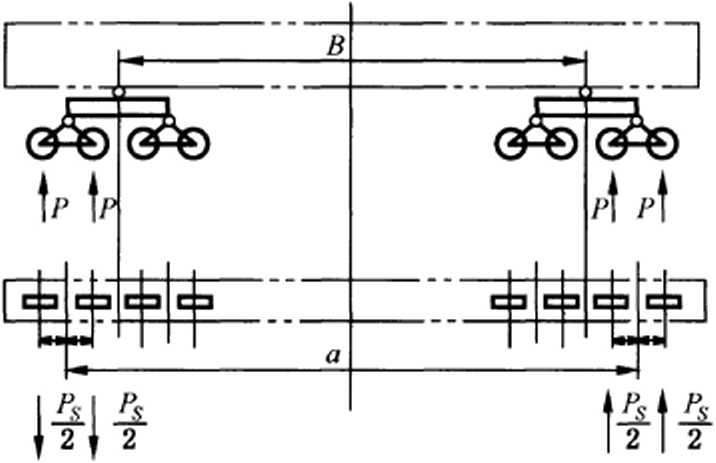
d)
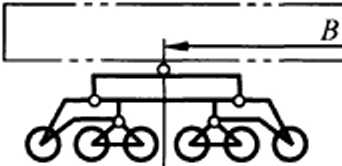
-■」 P ----
IF ∖p ∖p p∖ p∖ Ff
一 U
m⅜ι⅜ ⅜⅛⅛t
图C.3有效轴距及相应车轮轮压
附录D (资料性附录) 影响脆性破坏因素评价和钢材质■组别的选择
在本标准中已规定了抗屈服、抗失稳、抗疲劳的结构设计计算方法,但在某些情况下,仅有这些计算 还不足以说明结构材料已具有了抗脆性破坏的安全性。本附录对影响脆性破坏因素进行评价,并对钢 材质量组别进行选择,以保证起重机结构材料抗脆性破坏的安全性。
D.1对影响脆性破坏因素的评价
在塔式起重机金属结构中,导致构件材料发生脆性破坏的重要影响因素是:
——纵向残余拉伸内应力与自重载荷引起的纵向拉伸应力的联合作用;
——构件材料的厚度;
——工作环境的温度。
D.1.1纵向残余拉伸应力与自重载荷引起的纵向拉伸应力的联合作用的影响
以自重载荷引起的纵向拉伸应力"和焊接纵向残余拉伸应力的联合作用,见图D.1所示。
3 评价系数Zz4
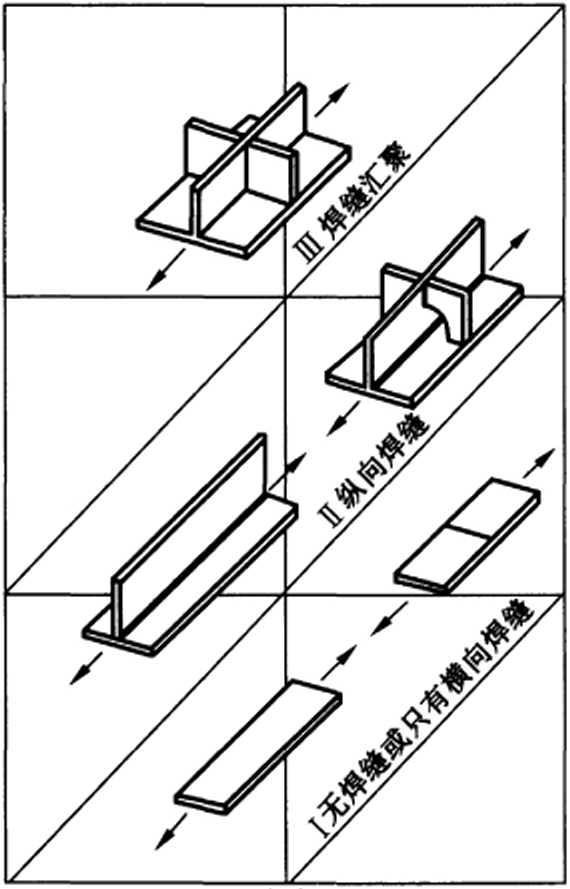
0.3
图D.1焊缝类型
0.6
I类焊缝:无焊缝或只有横向焊缝,脆性破坏的危险性小。当起重机自重等永久载荷(厶取1)引起 的结构构件纵向拉伸应力”与其钢材的屈服点S之比σG∕σ,>O.3时,才考虑此因素对脆性破坏的影 响。评价系数ZA按式(D.1)计算。
(D.1 )
式中:
ZA——(钢材质量组别选择的)残余应力影响评价系数;
结构构件纵向拉伸应力,单位为牛顿每平方毫米(N∕mm2);
σ,—钢材的屈服点。当钢材无明显的屈服点时,取¾2⅛σ,(σ0.2为钢材标准拉力试验残余应变 达0.2%时的试验应力),单位为牛顿每平方毫米(N∕mm2)o
II类焊缝:只有纵向焊缝的结构,脆性破坏的危险性增加。评价系数ZA按式(D.2)计算。
ZA =
0如
(D.2 )
式中符号同式(D.l)o
Hl类焊缝:焊缝汇集,高度应力集中,脆性破坏的危险性最大。评价系数ZA按式(D.3)计算。
σG ——+ 1 0.3σ, T
(D.3 )
式中符号同式(D.l)o
在有条件时,宜对In类焊缝进行消除残余应力的热处理(温度宜为600 eC〜650 °C),处理后可视为 I类焊缝选取钢材组别。
当钢材的屈强比σ,∕σA>0.7,式(D.1)〜式(D.3)中的X以(0.5σt ÷0.35σ6)代之。
D∙1∙2构件材料厚度的影响
构件材料的厚度越大,脆性破坏危险性也越大。当5 mm≤∕≤20 mm时,评价系数ZB按式(D.4) 计算,当20 mm<z≤100 mm时评价系数ZH按式(D.5)计算。
Zli =2 500
(D.4 )
ZB =0.650 - 14∙81 -0∙05
(D.5 )
式中:
ZB —(钢材质量组别选择的)材料厚度影响评价系数;
t——构件材料厚度,单位为毫米(mm)。
对轧制型材和矩形截面用假想厚度广来进行评价,z'按下列规定确定:
对轧制型材:
D对圆截面∕ = 1⅜,其中d为圆截面直径;
1.0
a)
b)
2)对方截面/ = c,其中t为方截面边长; l.o
对截面长边为6、短边为d的矩形截面:
1) 当两边之比⅛≤1.8时,√ = τ⅛;
a 1.0
2) 当两边之比⅜>1.8时,t' = d°
a
D.1.3
工作环境温度的影响
起重机的结构的工作环境温度取为塔式起重机使用地点的年最低日平均温度。当塔式起重机的结 构工作环境温度在O C以下时,随着温度的降低,材料脆性破坏的危险性越来越大。不低于一30 °C时, 评价系数ZC按式(D.6)计算,低于一30 °C、高于一55笆时,评价系数ZC按式(D.7)计算。
ZC ≈-^-T2
1 600
7 -2.25T-33.75
ZC= 77
(D.6 )
10
(D.7 )
式中:
Ze —(钢材质量组别选择的)工作环境温度影响评价系数;
T —起重机结构的工作环境温度,单位为摄氏度(笔)。
D.2钢材质■组别的选择
对钢材质量组别的选择采用综合评价法。将评价系数Za、Zb、Z(・相加,得到总评价系数Z,由表
D.1査岀所要求钢材质量组别。表D.2给出了各组对应的钢材牌号及相应的冲击韧性值。
表D.1与总评价系数有关的钢材质■组别的划分
|
总评价系数EZ = ZA+Z°+Zc |
与表D.2对应的钢材质量:组别 |
|
≤2 |
1 |
|
≤4 |
2 |
|
≤8 |
3 |
|
≤16 |
4 |
表D.2钢材质■组别及钢材牌号
|
钢材的质量组别 |
冲击韧性AKV _______________J |
冲击韧性的试验温度丁 ______________aC______________ |
钢材牌号 |
国家标准 |
|
1 |
— |
— |
Q235A |
GB/T 700 |
|
Q345B ______Q390B______ |
GB/T 1591 | |||
|
2 |
≥27 |
+ 20 |
Q235B |
GB/T 700 |
|
≥34 |
Q345B ______Q390B |
GB/T 1591 | ||
|
3 |
≥27 |
O |
Q235C |
GB/T 700 |
|
234 |
~~Q345C、Q390C、~ Q420C、Q460C |
GB/T 1591 | ||
|
4 |
227 |
-20 |
Q235D |
GB/T 700 |
|
≥34 |
~~Q345D、Q390D、~ Q420D、Q460D |
GB/T 1591 |
注1:如果板材要进行弯曲半径与板厚比小于IO的冷弯加丁.,其钢材需符合弯折或冷压折边的要求。
注2:除明确规定不允许采用沸腾钢的情况(见5.2.1.1.1)外,可适当选用沸腾钢。
附录E
(规范性附录)
管件焊接接头的承载能力
E.1通则
E.1.1本附录给出了塔式起重机常见管件焊接接头的极限承载能力验算规则,极限承载能力以接头腹 杆的设计轴向抗力的形式给出。
本附录给出的规则适用于材料的屈服点不大于460 N∕mm2的接头,当接头材料的屈服点大于 355 N∕mm2时,接头的设计轴向抗力需乘以0.9的系数。
E.1.2假定腹杆所受弯矩很小,计算中只考虑轴向力。如果腹杆受较大弯矩,应对接头进行加强。
E.1.3典型的管件焊接接头形式及其尺寸和内力定义见图E.lo
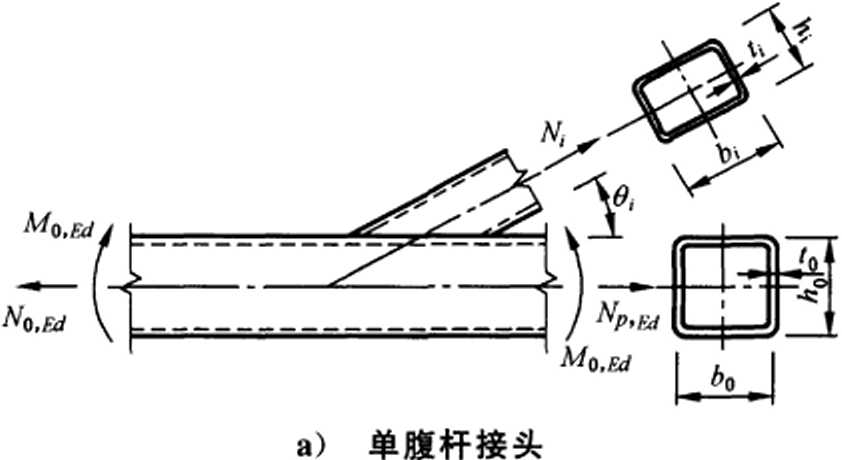
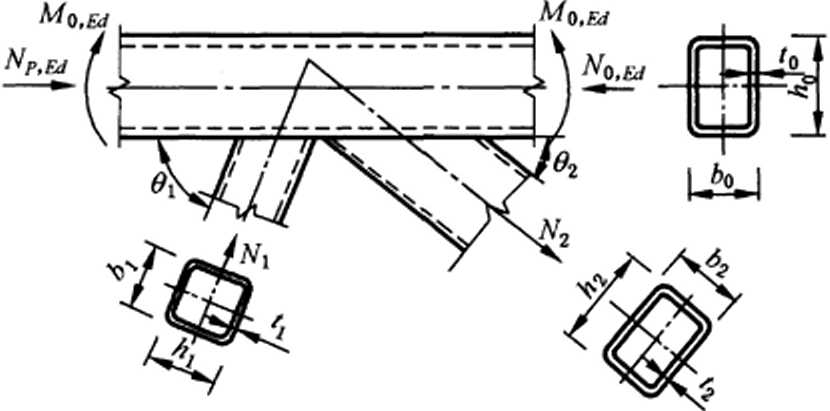
b)两腹杆间隙型接头
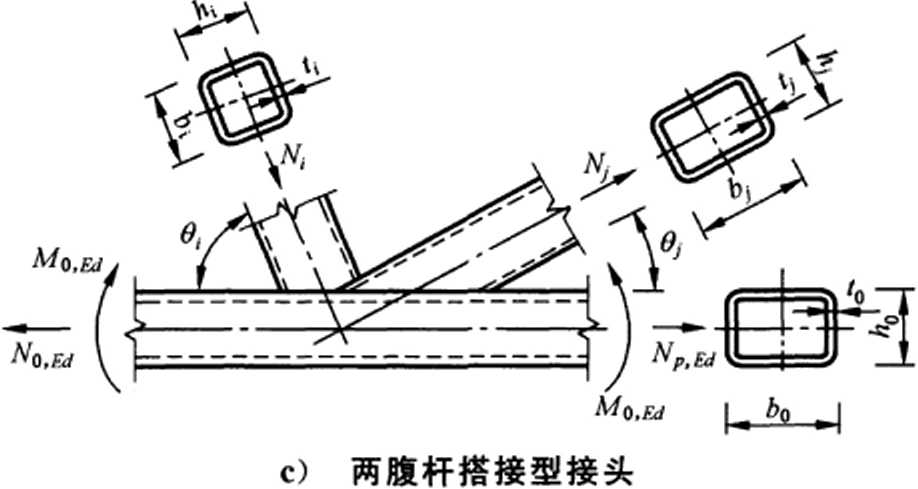
图E.1管件焊接接头及其尺寸、内力定义
E.2管件接头类型
本附录的规则仅限于图E.2所示的接头类型,且满足下列要求:
—管件的公称壁厚不应小于2.5 mm,并且除非采取特别措施确保材料厚度方向性能是足够的, 否则壁厚也不应大于25 mm;
—支管不应穿入或穿过主管;
—腹杆和弦杆的连接焊缝应沿全周连续焊接并平滑过渡;
—在节点汇集的杆件端部,其横截面形状不应改变,例如不包括端部压扁的连接;
— 由不同截面或不同强度等级的腹杆搭接,应遵循承载能力小的杆件搭接于承载能力大的杆件、 壁厚较薄的杆件搭接于壁厚较厚的杆件和宽度较窄的杆件搭接于宽度较宽的杆件的原则;
—弦杆和腹杆之间以及相邻的腹杆之间的夹角^≥30o(见图E.1);
—在间隙型接头中,为确保形成满意焊缝的充足间距,腹杆之间的间隙g应满足≡g≥z. +如[见 图 E.lb)和图 E.3];
——在搭接型接头中,搭接应足够大,以确保腹杆充分相连而使剪力足以从一个腹杆传递到其他腹 杆,搭接率琴应满足:λw = ⅜×100⅜≥25% [见图E.lc)和图E.3]o
P
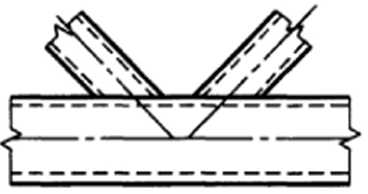
K型接头
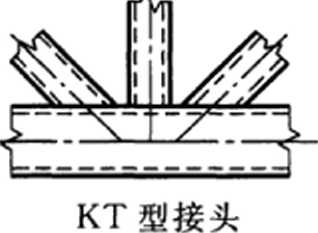
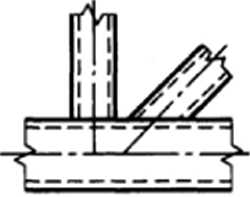
N型接头

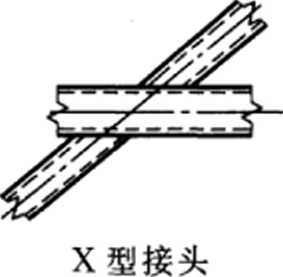

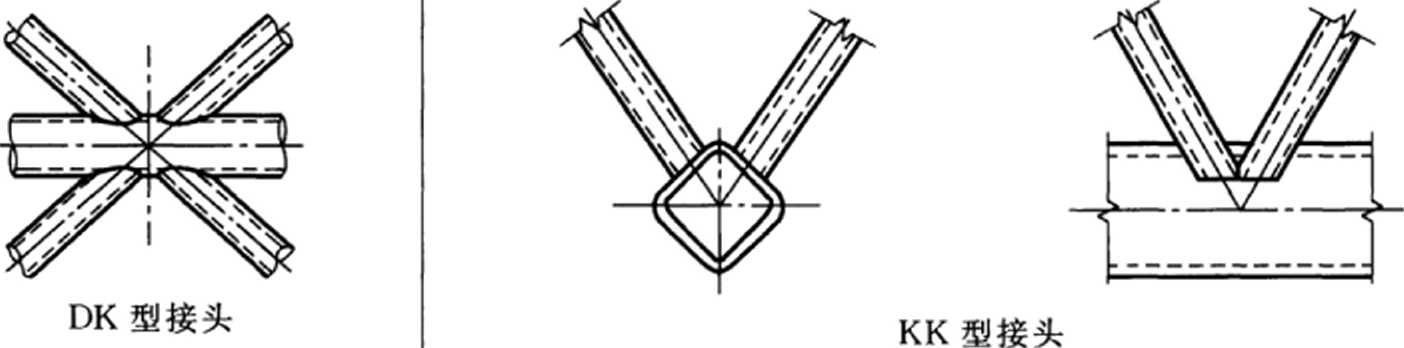

X型接头
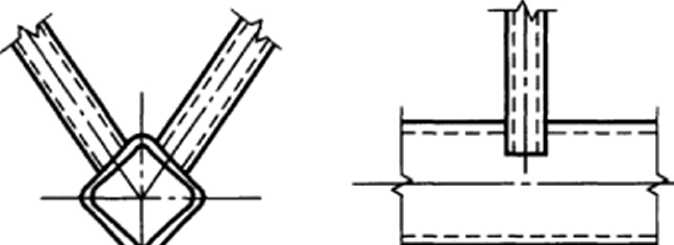
TT型接头
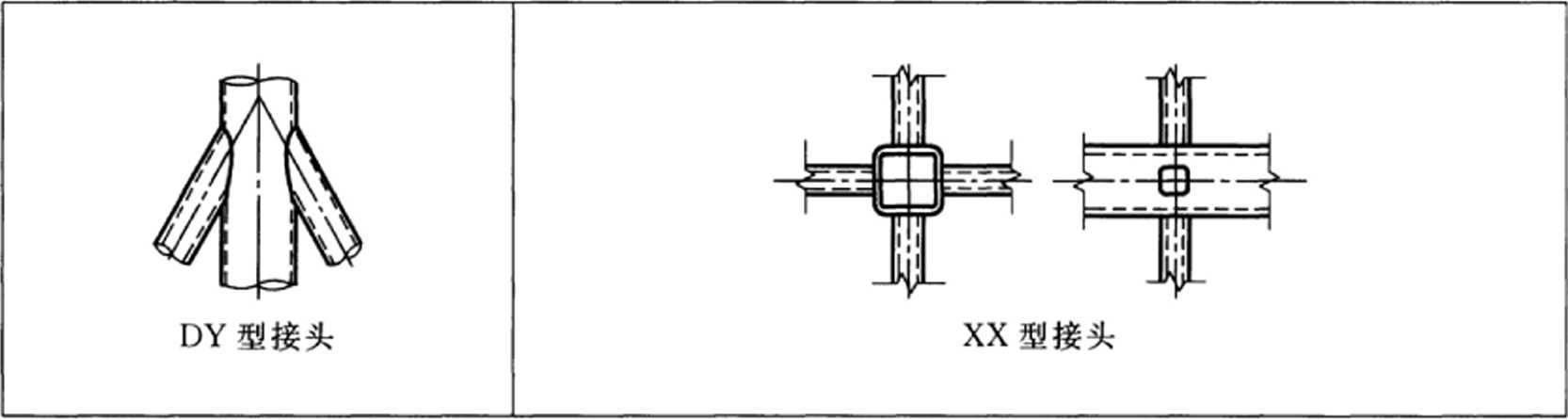
图E.2 (续)
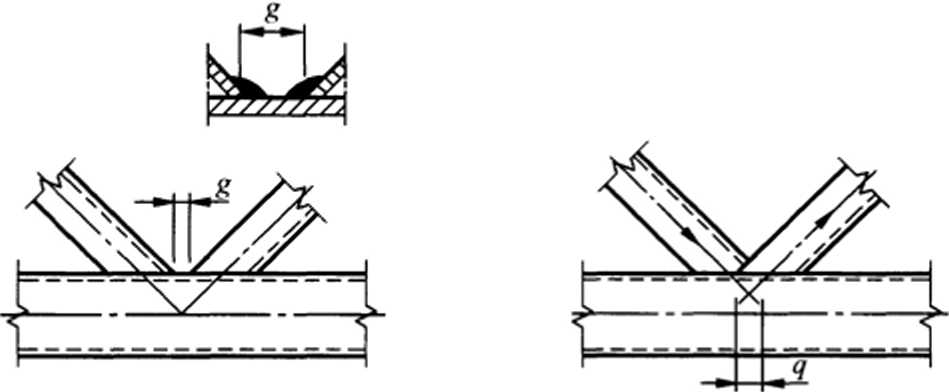
图E.3间隙和搭接尺寸的定义
E.3圆管之间的焊接接头
E.3.1圆管之间焊接接头的几何尺寸
验算承载能力时,圆管腹杆和圆管弦杆之间焊接接头几何尺寸的有效范围,除应符合E.2的要求 外,还应符合表E.1。
表E.1圆管腹杆和圆管弦杆之间焊接接头几何尺寸的有效范围
|
有效范围 |
说明 |
|
0.2≤c∕√Jo≤1.0 | |
|
10≤do∕ ro≤50,但对 X 型接头 s10≤c∕o/ ro≤40 |
di —腹杆直径J do——弦杆直径;/o —弦杆壁厚; /.——腹杆壁厚。参见图E.1 |
|
10≤c∕f ∕ ∕f ≤50 |
E.3.2圆管之间焊接接头的失效模式
对于接头几何尺寸的有效范围符合E.3.1的圆管腹杆和圆管弦杆之间焊接接头,仅考虑弦杆正面 失效和冲剪失效两种模式:
a) 失效模式a:弦杆正面失效,包括(弦杆正面的塑性失效)或弦杆塑性化(弦杆横截面塑性 失效);
b) 失效模式b:冲剪失效,空心管件弦杆壁的冲剪失效(萌生裂纹导致腹杆从弦杆裂开)。
图E.4给出了圆管腹杆和弦杆之间接头失效模式的示例。
失效模式
轴向载荷
a(弦杆正面失效)
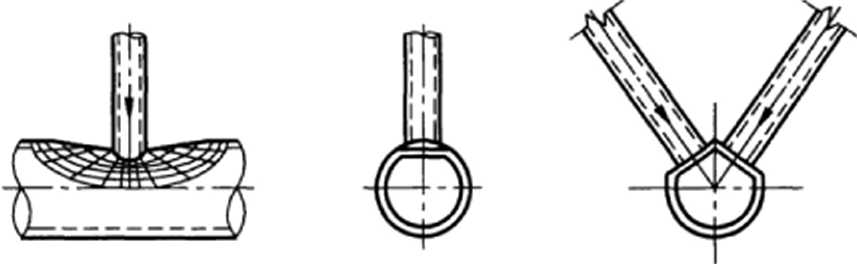
b(冲剪失效)
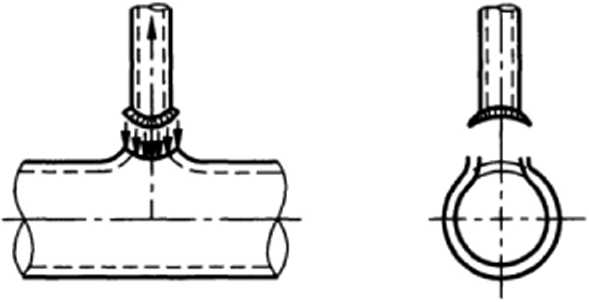
图E.4圆管腹杆和弦杆之间接头失效模式
E.3.3圆管之间焊接接头极限承载能力
对于同平面焊接接头,接头的设计轴向内力N,®不应大于接头的设计轴向抗力N,.曲,设计轴向抗 力由表E.2算得。设计抗力应取为所用适用失效模式中的最小值。表E.3给出了圆管腹杆和圆管弦杆 之间特殊类型焊接接头设计标准。
当接头为多平面接头时,其每一相关平面内的设计抗力乘以表E.4给出的折减系数〃后均应满足 上述的设计标准。
表E.2圆管腹杆和圆管弦杆之间焊接接头的设计轴向抗力
失效模式a:弦杆正面失效——T和Y接头
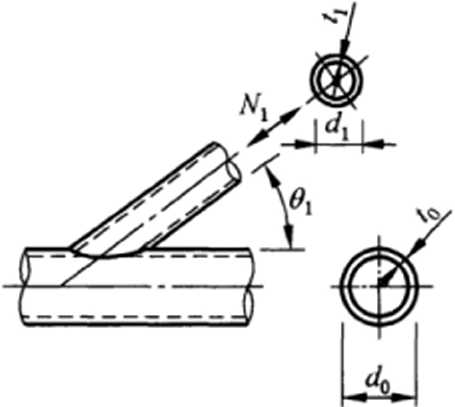
NW = L 切絆(2.8 +14.2伏)/" sιnt∕l
式中:y = √0∕2∕0 J β=d↑∕do I
∕m□ = 1.0? --弦杆材料的屈服点
失效模式a:弦杆正面失效—— X接头
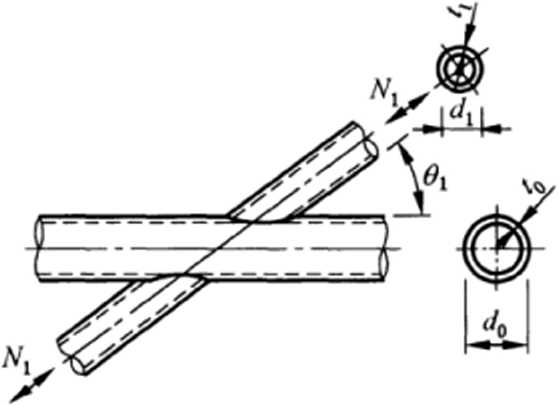
Ng =诙T(1-0.8IP) / M
表E∙2(续)
失效模式a:弦杆正面失效一K和N间隙型或搭接型接头
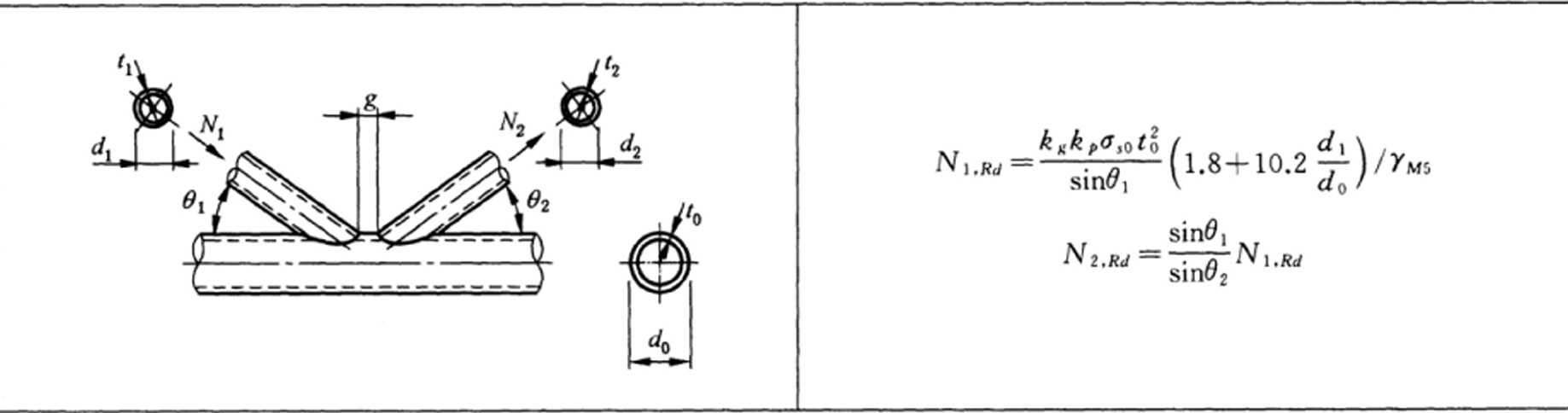
失效模式b:冲剪失效——K、N和KT间隙型接头和所有的T、Y、X接头,口 = 1、2或3]
当/"。一払时,Ng=絳5/ √3
1 + sin 仇 2sin2^Γ
//MS
系数妇和如
七=/2(1+ _ )(见图E.5),对于搭接型接头,g = -q°
∖ l + exp(0.5g∕ro-1.33) /
对受压弦杆:Ap = 1 —0.3np (1 +WA ) ι∏fi = I N pg ∣ /(σ10A0∕MS); AO---弦杆截面积。
对受拉弦杆M, = l∙0
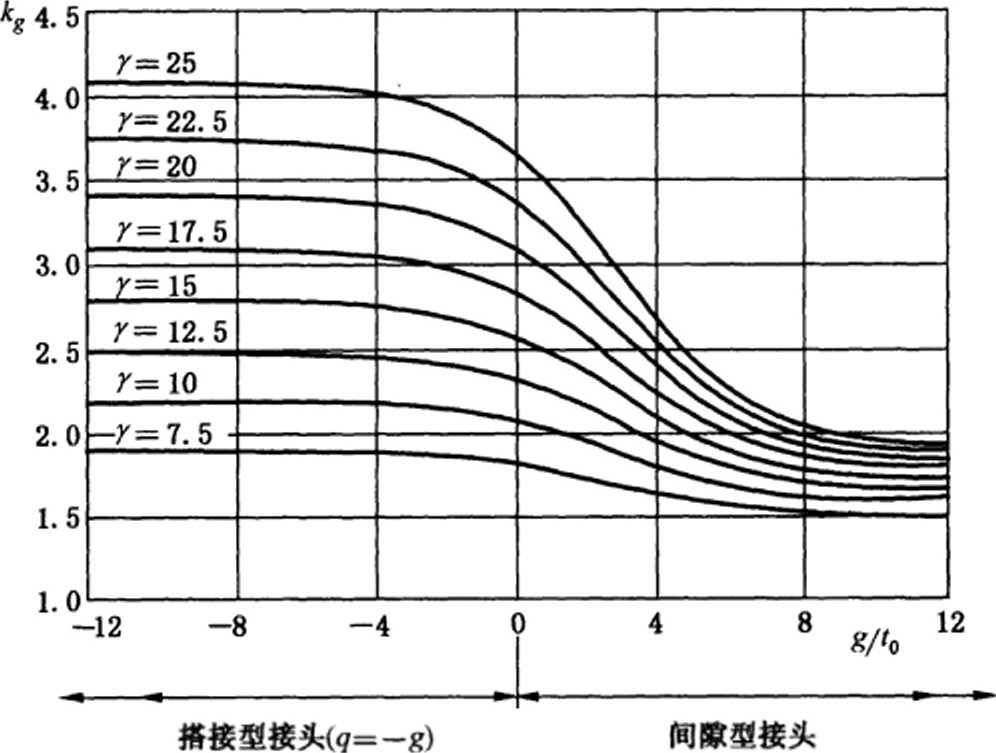
说明:
/——系数,见表E.2;
搭接型接头中腹杆之间的措接长度,见图E.3;
间隙型接头中腹杆之间的间隙,见图E.3、表E.2; 弦杆壁厚,见表E.2。
图E.5用于表E.2的系数虹值
表E.3圆管腹杆和圆管弦杆之间特殊类型焊接接头验算准则
接头类型
设计标准
两腹杆同时受拉或同时受压

N l,K4∣VN “Rd 式中:M应——表E.2中X接头的NIm值
腹杆1始终受压,腹杆2始终受拉
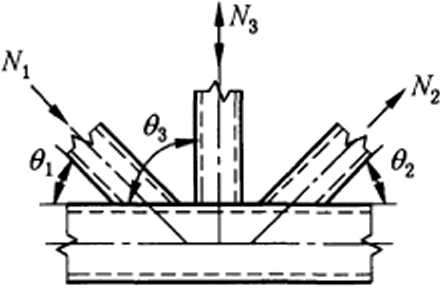
Ni." SinS + N3.ω sinʤ ≤NI.Rd Sln^l
M∙田 sin/WNι∙∣w sin。]
式中:Mm — 表E.2中K接头的N函值,但dl∕d0用 (小+土+心)/34。代替0、dz、d3分别为 三根腹杆的直径
所有腹杆应始终都受拉或都受压

NESins+M心 sin∕<N-RdSinex
式中 N,Rd—表E.2中X接头的N∣.w值,N,.r(ZSin们为 I Nj.R<∕ Sin^l I 和 I N2.Rd sin^2 | 中的大者
腹杆1始终受压.腹杆2始终受拉
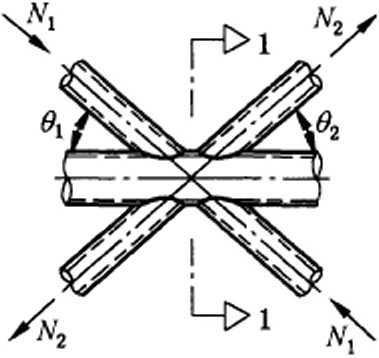
N ,∙kzWzN Zd
式中:Nj.Rd——表E.2中K接头的N函值 对间隙型接头,还需验算弦杆的1一1截面的强度
表E.4多平面接头的减小系数
接头类型
减小系数〃
TT 接头 60o≤≠≤90o
腹杆1可受拉或受压
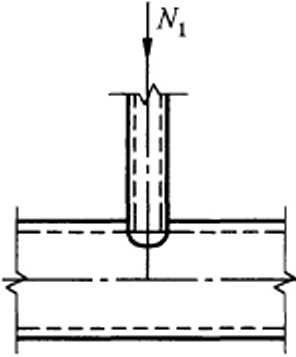
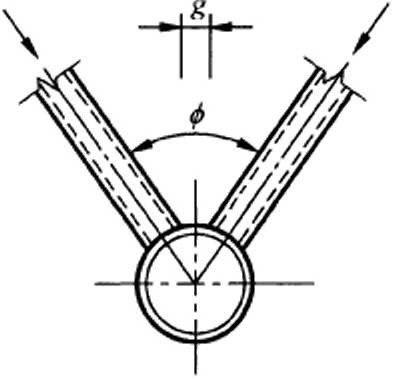
XX接头
腹杆1和2可受拉或受压。如果一个杆受拉另一个杆 受压,则N 2.田/ NIJʌ/为负的
rɪ
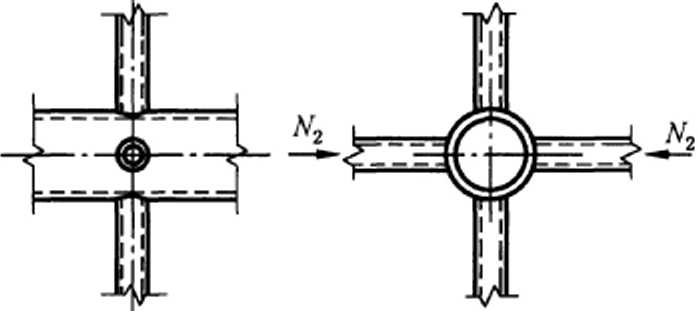
M UI
兴= l+0∙33N?.加/M.W
考虑NHd和N2.w的符号∙∣N2.EJ I ≤ I N ∣.E<∕ I
KK接头
腹杆1始终受压.腹杆2始终受拉
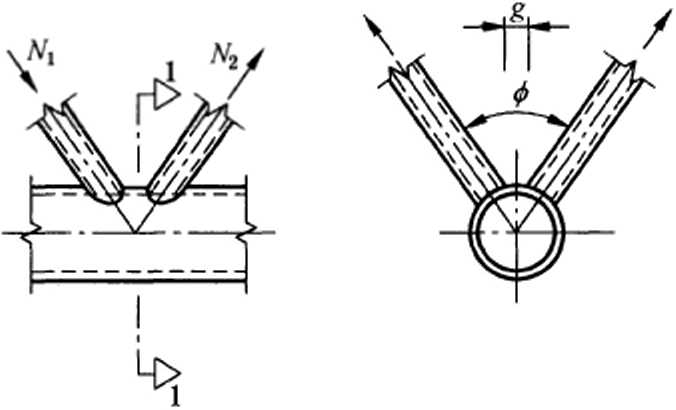
X = O.9 对间隙型接头,还需验算弦杆的1一1截面的强度
E.4矩形(含方形)截面管之间及其与圆管腹杆的焊接接头
E.4.1焊接接头的几何尺寸
验算接头承载能力时,圆管或矩形截面管腹杆和矩形截面管弦杆之间焊接接头几何尺寸的有效范 围,除应符合E.2的要求外,还应符合表E.5o
表E.5圆管腹杆或矩形截面管腹杆和矩形截面管弦杆之间焊接接头几何尺寸的有效范围
|
接头类型 |
接头参数Lr = I或2√ =被搭接的腹杆] | |||||
|
bjbo 或 dt ∕b0 |
b,∕ti 和 hiIti 或 djt, |
Λ 0/bo 和 h,/b, |
bo/to和 ho /Io |
间隙或搭接型 bi∕bi | ||
|
受压 |
受拉 | |||||
|
T、Y 或 X |
6,/加 >0.25 |
",<35 且 Λ.Λ.≤35 |
6.∕C≤35 且 A,Λ,≤35 |
20.5 但 ≤2.0 |
≤35 |
....... |
|
-K间隙型- N间隙型 |
~"/S0.35 且-20.1+0.01Mo |
≤35 |
-O.5(l-∕5)≤g∕6o≤1.5(l-^) a _______且一矛丨+,2________ | |||
|
K搭接⅜!~ N搭接型 |
b JbM. 25 |
25⅝≤λ,,v≤100⅝ b _______且加/如20.75_______ | ||||
|
圆管腹杆 |
0.4≤J,∕6o≤0.8 |
50 |
同上,但用d,取代"、匕取代如 | |||
|
注:。一一腹杆与弦杆平均直径或宽度之比;在K和N接头中,腹杆为圆管的F=(小+刈)/2知,腹杆为矩形 管的 R= (6∣÷Λ2+A,÷Λ2)∕4Z>o; λ,n.——搭接型接头搭接率,见E.2和图E.3; g —间隙型接头中腹杆之间的间隙,见图E.3、表E.7〜表E.9; 其他尺寸参数符号见图E.1、表E.2、表E.7〜表E.9。 | ||||||
|
•如果g/儿>1.5(I-B)且g>L+A,则视该接头为两个独立的T或Y接头。 b搭接部分可增加,以使被搭接的腹杆的趾部焊接到弦杆。 | ||||||
E.4.2焊接接头的失效模式
对于接头几何尺寸的有效范围符合E.4.1的圆管腹杆或矩形截面管腹杆和矩形截面管弦杆之间焊 接接头,考虑下列失效模式:
a) 失效模式a:弦杆正面失效,包括弦杆正面失效(弦杆正面的塑性失效)或弦杆塑性化(弦杆横 截面塑性失效);
b) 失效模式b:冲剪失效,空心管件弦杆壁的冲剪失效(萌生裂纹导致腹杆从弦杆裂开);
C)失效模式c:弦杆剪切失效;
d) 失效模式d:弦杆侧壁失效,在腹杆组成部分的压缩下而屈服、压溃或失稳(弦杆侧壁屈折或屈 曲)的弦杆侧壁失效;在腹杆受压的情况下,由于屈服、压服或失稳(弦杆侧壁或弦杆腹板屈折 或屈曲)而引起弦杆侧壁失效(或弦杆腹板失效);
e) 失效模式e:腹杆失效,有效宽度减小(焊缝或腹杆组成部分开裂)的腹杆失效;
图E.6给出了矩形截面管腹杆和矩形截面管弦杆之间接头失效模式的示例。
a(弦杆正面失效)
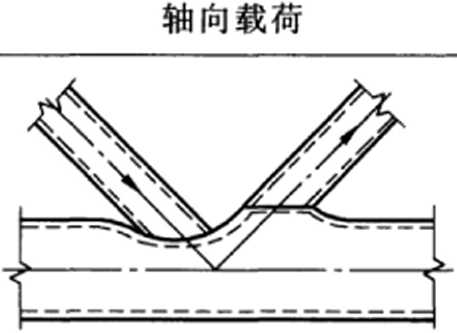
b(冲剪失效)

c(弦杆剪切失效)
d(弦杆侧壁失效)
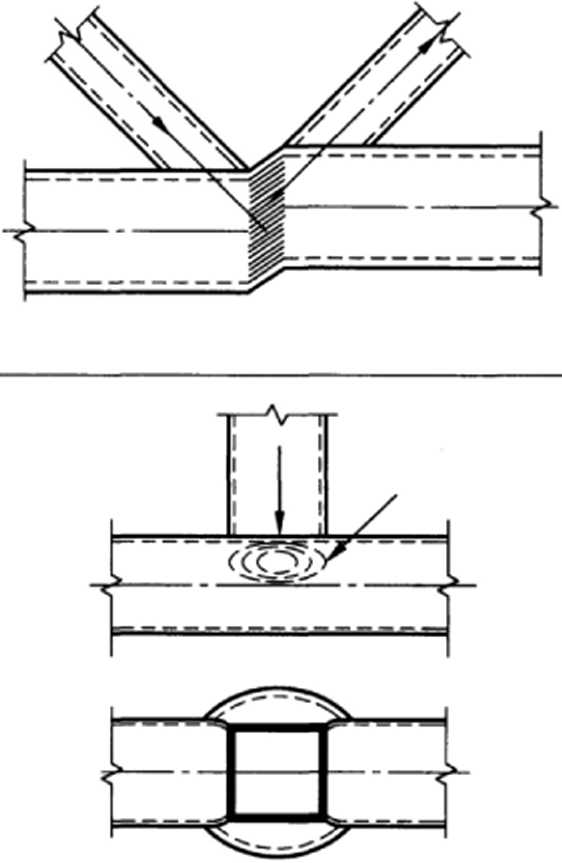
c(腹杆失效)
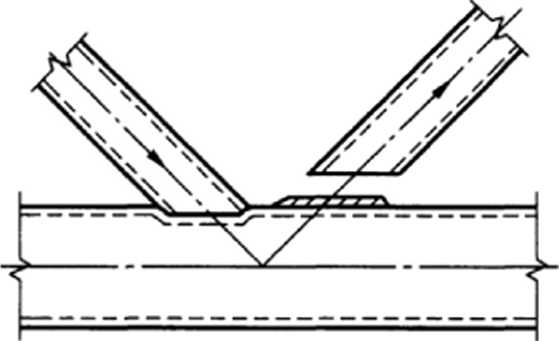
图E.6矩形截面管腹杆和矩形截面管弦杆之间接头失效模式
E.4.3焊接接头极限承载能力
对于同平面接头:
—圆管或矩形截面管腹杆和矩形截面管弦杆之间焊接接头的设计轴向抗力,可由表E.7〜表E.9 得到;验算时只考虑表中所列的失效模式,设计抗力应取为所有适用失效模式的最小值;
—对于圆管或方形截面腹杆和方形截面弦杆之间的焊接接头,如果接头的几何尺寸还满足表E. 6 列出的附加条件,只有弦杆正面失效和腹杆失效两种失效模式需要考虑,其设计轴向抗力可由 表E.7给出的公式确定;
—焊接接头的设计轴向内力N,m不应大于设计轴向抗力N,.w;
—表E.10给出了某些常用的特殊类型焊接接头应满足的设计标准。
当接头为多平面接头时,每一相关平面内的设计抗力乘以表E.U给岀的折减系数〃后均应满足上 述设计标准。
表E.6表E.7用的附加条件
|
腹杆类型 |
接头类型 |
接头参数 | |
|
方形截面管 |
T、Y 或 X |
β = ∕λ∕60≤ 0.85 |
6oΛo≥ 10 |
|
K间隙型或N间隙型 |
0.6≤(61+ b2)/ 26l≤1.3 |
Λo /to N 15 | |
|
圆管 |
T、Y 或 X |
bo/1 a 2 10 | |
|
K间隙型或N间隙型 |
0.β≤(√∣÷ √2)/ 2√1≤1.3 |
b Q,t o N 15 | |
表E.7方形截面管或圆管之间焊接接头的设计轴向抗力
接头类型
设计抗力言=1或2√ =被搭接的腹杆]
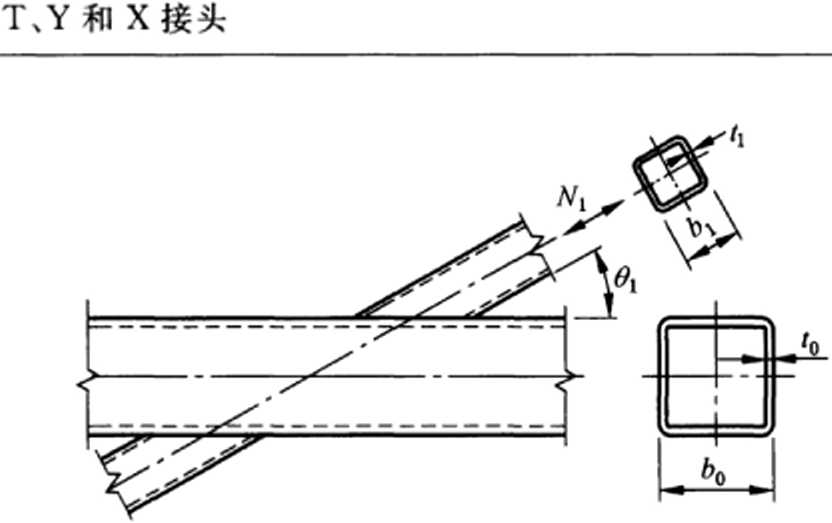
弦杆正面失效^≤0.85
Nm = (T⅛編(豔+ 4 ZM5
K和N间隙型接头
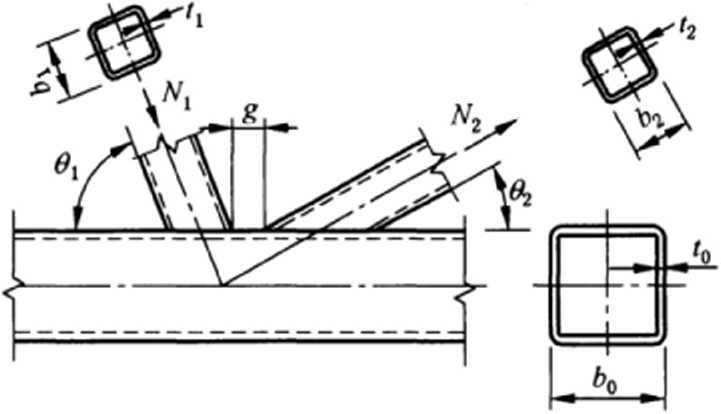
弦杆正面失效^≤1.0
8.9^,,σlθZo yF [b∖ ÷62 \ .
E = ―—— -”
接头类型
K和N搭接型接头,
设计抗力U = I或2,j =被搭接的腹杆]
腹杆失效25%WLV50%
腹杆i或,可受拉或受压,但应一个受拉另一个受压
N “Rd =^,1∕ i (brff -∖~br,ov + ~,(2Al —4/,)) /∕m.->
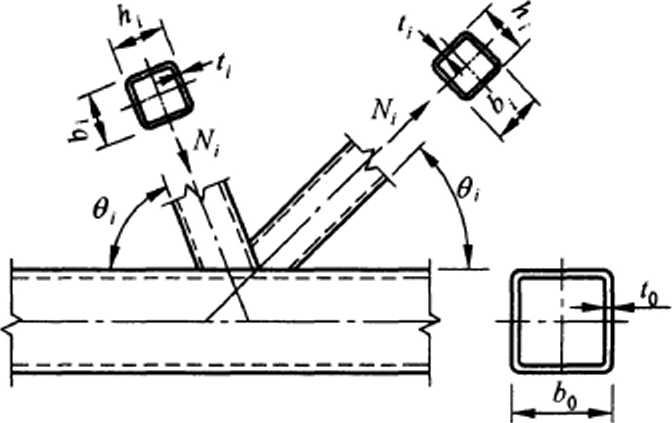
腹杆失效50%≤λrn < 80%
NLRd =“£ (6√∕+^r.ov÷2Af —4∕l )∕∕m5
腹杆失效λ..≥ 80⅝
NLRd =0Uti (b, ÷^e.ov÷2λi —4Zi )∕∕m5
参数"4和如
妇=广1?财常,但妇心 对受压弦杆血=1.3 — 0.4”/為但如<1.0,
ðθ/Otiti I I
---------------------------------------------------------n = I Now I /(σ,0 A0 Zms)
i = rɪθ (^Lbl ,但bS 对受拉弦杆:如=1.0
对于岡管腹杆,用π∕4乘以上述的抗力,用d∣取代们和丄,用丄取代处和心。
注:β ——腹杆与弦杆平均直径或宽度之比'在T、Y和X接头中,腹杆为圆管的∕? = d∖∕"腹杆为矩形
截面管的夕=bjb.χ在K和N接头中,腹杆为圆管的B=(d\+d2)/2b。,腹杆为矩形截面管的 ^=(6,+62+A1+Λ2)∕46o;
λw ——搭接型接头搭接率,见E.2和图E.3;
6, 9)—分别为腹杆i和丿材料的屈服点。
α只验算搭接腹杆。
表E.8矩形截面管或圆管腹杆和矩形截面管弦杆之间T、X和Y焊接接头的设计轴向抗力
接头类型
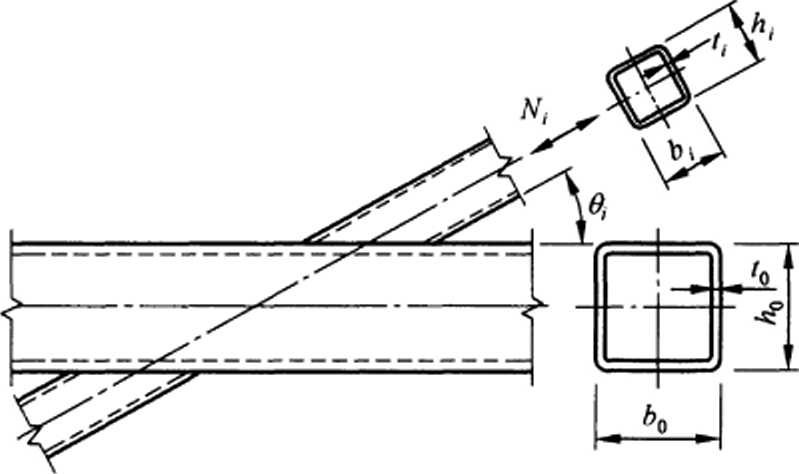
设计抗力[i = l]
弦杆正面失效RW0.85
K F ʃo 2h i Z ɪ I
Ni.Rd = T: 々\ ・ Q "~Γ-λ" + 4 y∕∖ -β /7M (1—0) SmSLDoSinS J
弦杆侧壁屈曲∙ P=l.ob

腹杆失效 F20∙85
N “Rd —(Jiiti (2如〃 Ψ2Λf -Ati )//ms
冲剪 0.85≤^≤(l-l∕/)
Ni,RtJ= ,°t° (-τ⅛- + 26r.^ V/.W5
√3sin(91 ∖s∏A Pf
|
接头类型 |
设计抗力[i = l] |
|
对于圆管腹杆,用π∕4乘以上述的抗力,用&取代们和如,用丄取代S和方2 | |
|
对受拉:σft=σ4θ 对受压:σ6=φσ,0(T和Y接头) U=O.8伊,osinQ(X 接头) 其中低为轴心受压构件的稳定系数(见附录H) .其所对应 的长细比义由下式确定: λ=3∙46(77-2)√ζJ |
10 σ>oto ZH / 妇'=E商加'但如〃 <缶___________ |
|
如洗Λ'但知g___________ | |
|
对受压弦杆:如=1.3—0.4”/偽但如W1.0, V = I No.£«/ I /(b,oA%5) 对受拉弦杆:如=LO | |
|
注淤——腹杆与弦杆平均直径或宽度之比;在T、Y和X接头中,腹杆为圆管的夕=d\/b。、腹杆为矩形截面管的 β = b∖∕bot> | |
|
"对于。V 90°的X接头,使用该值和表E.9中对K和N间隙型接头给出的弦杆侧壁设计剪切抗力中较小 的值。 b对于O.85≤∕J≤1.O,在Q=0.85时的弦杆正面失效的值和B=I. 0时的弦杆侧壁失效(侧壁屈曲或弦杆受剪)的 控制值之间用插入法得出。 | |
表E.9矩形截面管或圆管腹杆和矩形截面管弦杆之间K和N焊接接头的设计轴向抗力
接头类型
K和N间隙型接头
设计抗力[i = l或2]
弦杆表面失效
弦杆剪切失效
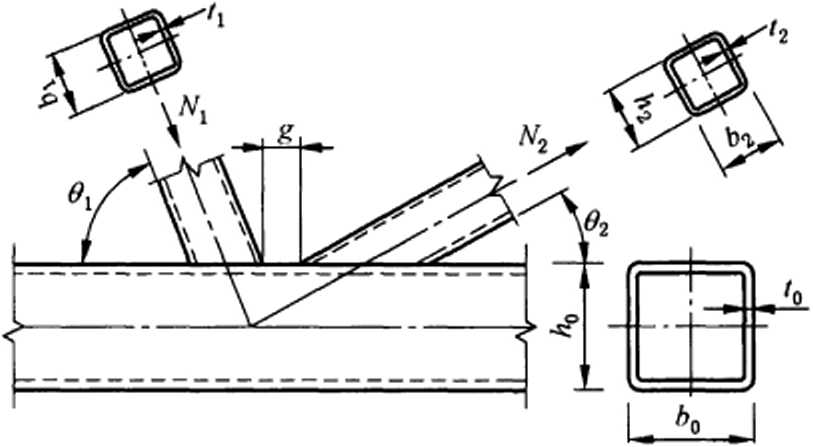
N ,.Rd — ~ //M3
√3sin^
Nθ.Rd =
[(Ao-Aυ)σ,o+Al.σ,0 √1 - )2 ]/M
式中:
AV —弦杆的受剪面积;
AO ——弦杆的面积;
Vw —弦杆所受剪力,
VMR——弦杆材料的乾切极限承载力
腹杆失效
Nd =(JUti (bl +丄〃 +2方,一4七)/∕m∙i
冲剪失效 ∕J≤(1-1∕/)
Jo,。/ 2hi \ .
NLRd =T= ~ A + 们 +b,∙p ) //M3
√3sin^r 'sm们 Pl
|
接头类型 |
设计抗力H = I或2] |
|
K和N搭接型接头 |
同表E.7 |
|
对于圆管腹杆,用π∕4乘以上述的抗力,用小取代加和加,用少取代缶和人2 | |
|
Av = (2Λ0÷α6o)∕o 对方形或矩形截面管腹杆: 其中K为间隙型接头中腹杆之间的间隙,见图E.3、 表E.7〜表E.9等。 对圆管腹杆:。=0 |
厂岑-誓如,但M<b. Oo/to (JUti |
|
%=&"但如心, | |
|
对受压弦杆MIt = I.3 — 0.4〃//?.但 Λw≤1.0 〃 =I No.E<∕ I /(0,0 Ao 7m5) 对受拉弦杆:上=1.0 | |
|
注:F——腹杆与弦杆平均直径或宽度之比;在K和N接头中,腹杆为圆管的β = (√1 ÷√2)∕26o,腹杆为矩形管 _________的夕=(们+么+如+方2)/"。°_________________________________________ | |
表EJO矩形截面管腹杆和矩形截面管弦杆之间特殊类型焊接接头的验算准则
接头类型
设计标准
腹杆可以受拉或受压,但对两腹杆都应作用在同一方向
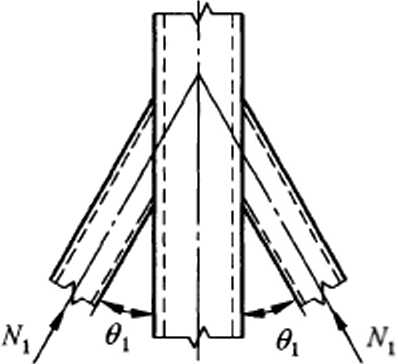
N I ,以 < N 1∙ Rd
式中:
NLW —表E.8中X接头的NLR值
腹杆1始终受压.腹杆2始终受拉

Nl \
务
IrZq
NE Sin^l + N3tE</ sin^3≤ NLRdSin8】
Nz.ec∕ sin^2≤ N I. κd SinS
式中:
N1.RJ——表E.9中K接头的N∣.w值,但(Al÷½+Λ1÷ Λ2)∕46<i用(们 + 缶 + ∂3 ÷Λl +Λ2 +Λ3)∕66o 代替
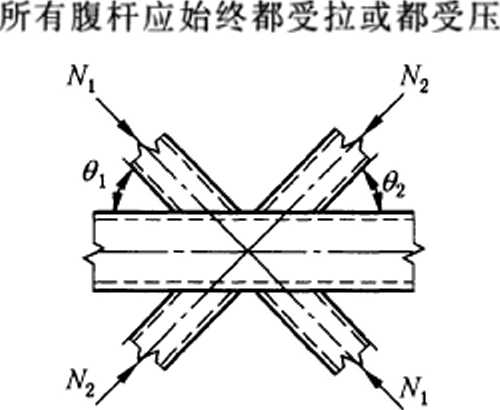
Nι.βz SinS+ N2.ej SirAW NlJU Sinor
式中:
N.Rd—表E 8中X接头的Ng值,N,,W SirA 为
I Ni.r√Sin^l I 和 I M.;WSin^2 I 中的大者
|
接头类型 |
设计标准 |
|
• 腹杆1始终受压,腹杆2始终受拉 Nl M ∈≡≡ |
Nl.κc∕≤ N,.Rd 式中: N,.w —表E.9中K接头的Ni.Rd值。 对间隙型接头,还需验算弦杆的1一1截面的强度 |
表EJI多平面接头的减小系数
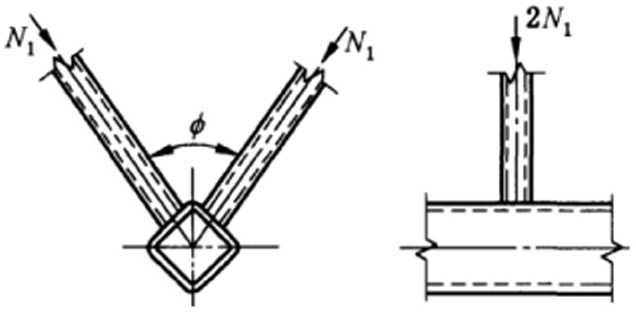
μ=O.9
|
接头类型 |
减小系数“ |
|
TT 接头 60o≤φ≤ 90° | |
|
腹杆1可受拉或受压 | |
XX接头
腹杆1和2可受拉或受压。如果一个杆受拉另一个杆受 压,则田/M.田为负的
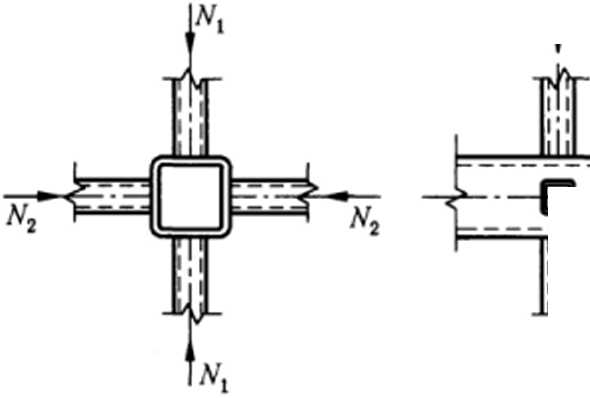
∖n,
" = 0∙9(l+0∙33N2∙s/NL疝)
考虑N∖.Ed 和 M.舟的符号 » I N2.Ed I ≤ I NE
KK接头
腹杆1始终受压,腹杆2始终受拉
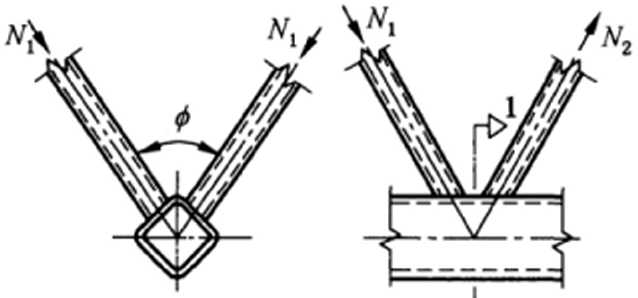
μ = Q.9
对间隙型接头,还需验算弦杆的1一1截面的强度
⅛>1 附录F (资料性附录) 受有均布载荷的结构件的折算轴向力
在图F.1所示的长度为L的结构件上,作用有均布载荷g,g与结构件纵轴线间的夹角为们 则结 构件可等效为受有均布横向载荷qsinθ和端部集中载荷 H=告CoS。,如图F.2所示;其中KN为 与结构件支承方式有关的系数,当结构件为两端简支支承时,Kn取为2;结构件悬臂时,K.、,取为3。
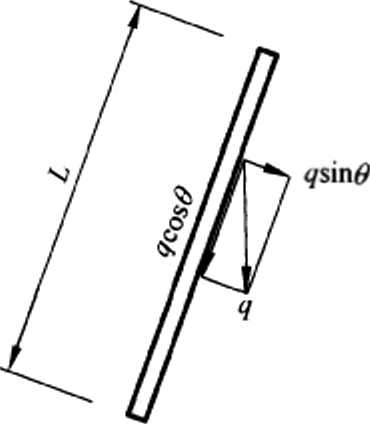
圏F.1结构件承受均布载荷
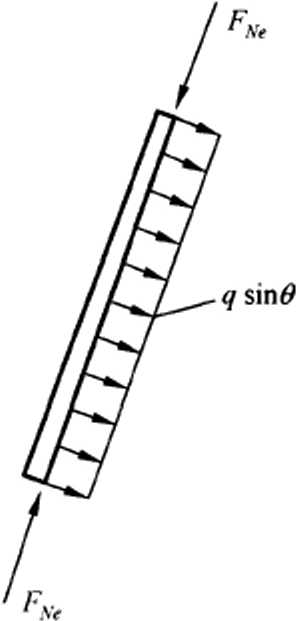
图F.2等效计算载荷
附录G (规范性附录)
受压构件的计算长度和格构式构件的换算长细比
G.1受压构件的计算长度/c
G.1.1受压构件计算长度L的计算
受压构件的计算长度Ir ,按式(G.1)计算。
Ir =“/2/3/4, ........................( G.1 )
式中:
IC——受压构件的计算长度,单位为毫米(mm);
L ——构件的实际几何长度,单位为毫米(mm);
3——与构件支承方式有关的计算长度系数(在两个相互垂直的平面内不一定相同),见G.1.2;
μ2—变截面构件的计算长度系数,见G.1.3;等截面时取zz2 = l;
卩3—对于端部或中间部位有拉索(钢丝绳或拉杆)的构件,考虑拉索非保向力作用的受压构件的 计算长度系数,见G.1.4;
印——考虑双轴向力作用的受压结构件的计算长度系数,见G.1.5o
G.1.2与构件支承方式有关的计算长度系数凸
G.1.2.1符合表G.1所示支承情况且附着支撑的变形可以忽略的构件,其计算长度系数m∣值可按表 G.1査取。
表G.1计算长度系数%值
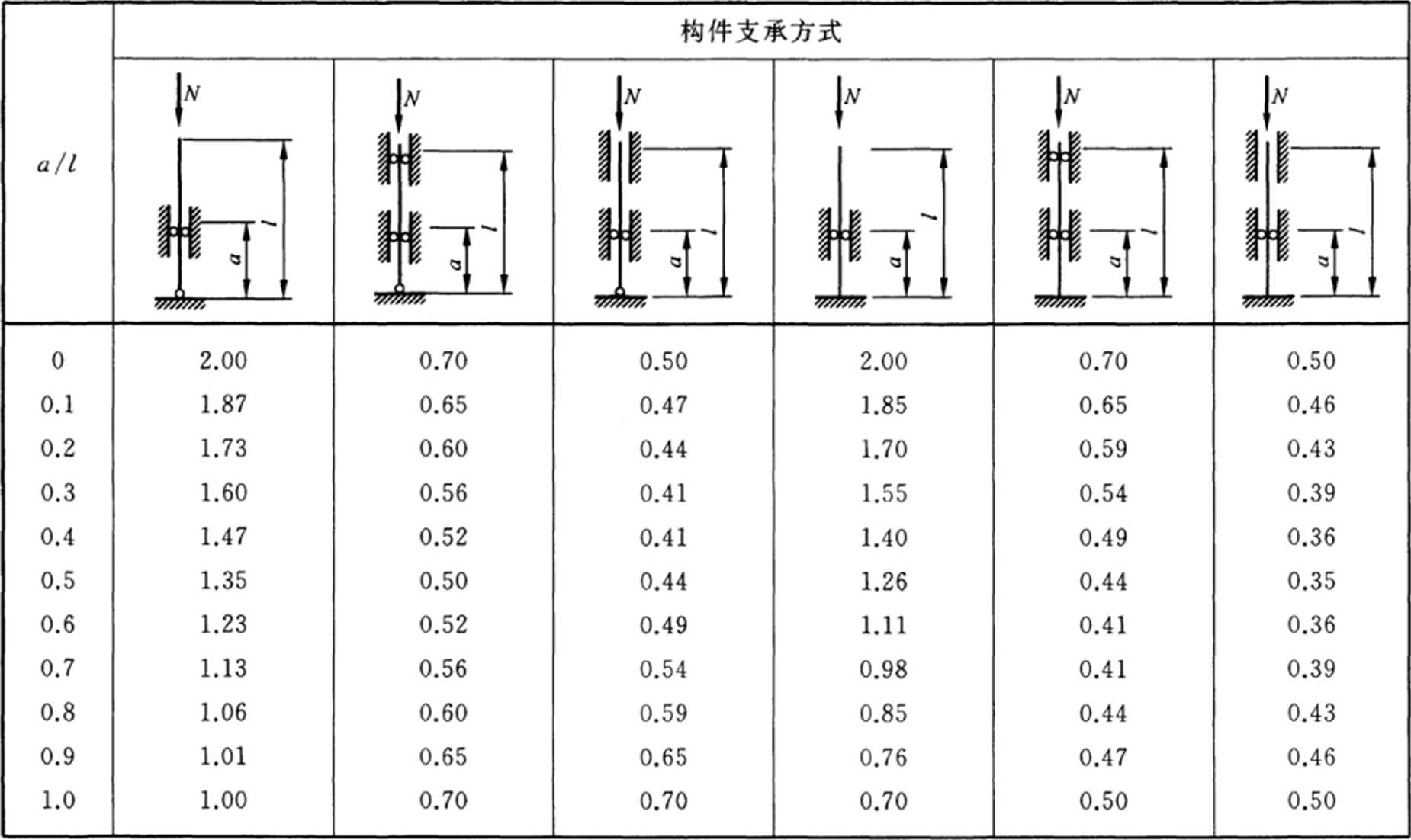
G.l.2.2对于具有两道、三道及四道以上附着支撑的塔身,取其最上面的悬臂段I为结构几何长度时,
其计算长度系数灼,可根据塔身的抗弯刚度EIa^Ela^附着支撑的柔度Ca及各部分长度的比例关系, 按表G.2査取,表G.2中的K,按式(G.2)计算。
K,=
6EZulQ
~il-
........................(G.2 )
式中:
Kt——表示塔身及附着支撑特性的无量纲系数;
ZO —附着点之间或附着点与基础或附着点与底座之间的距离,单位为毫米(mm);
/uɪ —塔身Zo段截面按某轴的抗弯截面惯性矩,单位为四次方毫米(mm4);
E ——钢材的弹性模量,E = 2.06×105N∕mm2,同式(53);
C6——在所计算的平面内附着支撑的柔度,一般可不计锚固附着支撑的建筑物或结构物本身的柔 度,只计算附着支撑本身及其附属部件的柔度,单位为毫米每牛顿(mm∕N)O常见附着支 撑的柔度(不计锚固附着支撑的建筑物或结构物本身的柔度)按式(G.3)〜式(G.8)计算。
a)单侧三杆式附着支撑(见图G.1)的柔度按式(G.3)、式(G.4)计算。
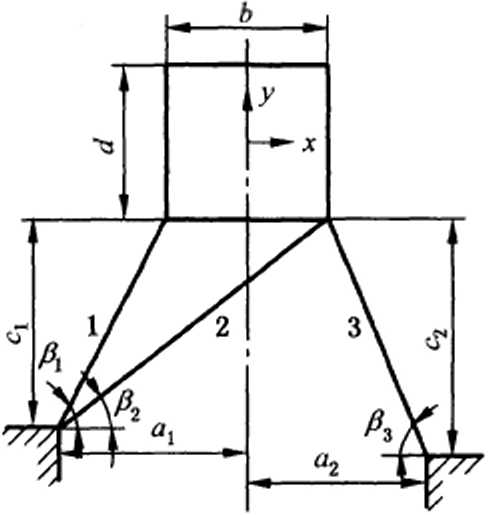
图GJ 单侧三杆式附着支撑
]方向的柔度:
(2cι + d) ASinft — dR \ 2 Iz X T=Ti * EA2
2bR Sin^2
2R / ×⅛ ""S)
2cι +Q
R — 2αl sɪnft \ 2 人 /ɑɪʌ 2
I EAI十[京丿 EA
2R sin/?
I3
(G.4 )
式中:
A,
杆i的截面积,单位为平方毫米(mm2);
杆i的长度,单位为毫米(mm),可表示为=√c5 + (α1-6/2)2 ,Z2 =
√d + (αι+6/2)2 J3 =√ci + (sT∕2)2 .
βf
杆i的角度,见图G.1,也可表示为:& = arctan
α1→∕2)^2=arctan
(—4T7?),03 = arctan (— );
I ÷o∕2, 2 —o∕Z,
R ----R = (Ql+5/2)Sing3+cιcos03;
S、Q2、b、C32、d —几何尺寸,见图G.1,单位为毫米(mm);
E ——钢材的弹性模量,E = 2.O6×1O5 N∕mm2,同式(53) O
b)单侧对称四杆式附着支撑(见图G∙2)的柔度按式(G・5)、式(G∙6)计算。
A
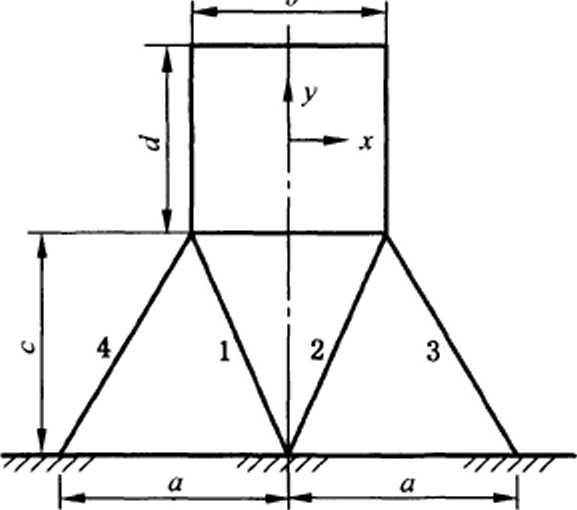
图G.2单侧对称四杆式附着支撑
ʃ方向的柔度:
P _ ∕≤ _ 2c+d \ 2 I ∕2cJ-√ \ 2 K .........
(G.5 )
齢—板 MI X 2c2EAx 十 ∖ 2α)X 2c2EA3
y方向的柔度:
()2 仃 (財 3 V ......
(G.6 )
3y~∖^A3+HA1/ λ2c2EAI 十 ∖l↑A3+HAi∣ ʌ 2c2EA3
式中:
A, —杆3的截面积,单位为平方毫米(mm2),且A∣ = A?,A:, = A.,;
Ii ---杆 i 的长度,单位为毫米(mm),且 ZJ =∕2=√c2+62∕4 d3=h =Vc2+ (a —6/2)2 ;
Q、b、c、d —几何尺寸,见图G.2,单位为毫米(mm);
E ——钢材的弹性模量,E = 2.0β×105N∕mm2,同式(53)0
C)双侧对称四杆式附着支撑(见图G.3)的柔度按式(G.7)、式(G.8)计算。
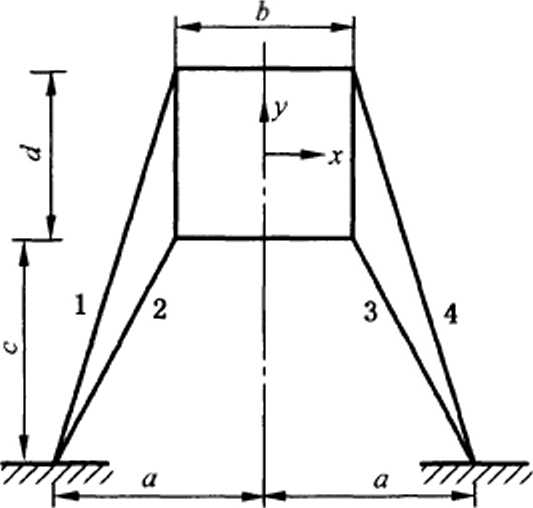
图G.3双侧对称四杆式附着支撑
ɪ方向的柔度:
/ 2bc \2_ ∕? (2b(c+d) \2 ʊ ZI
.........(G.7 )
aτ = ∖d(2a -b) ~ ɪ / X 8α⅛A1 + ∖d{2a-b} + ɪ / X Sa2EA2
y方向的柔度:
V 2E(c2l^A2 + (c+d)2HAl) 式中:
A, —杆,的截面积,单位为平方毫米(mπ√),且AI= Λl,A2= A3;
II ——杆i的长度,单位为毫米(mm),且ll=l4 =V(C+d)2+ (a-b∕2)2 ,
Iz=I 3= √V +(• —-/2)2 ;
Q、b、c、d ——几何尺寸,见图G.3,单位为毫米(mm);
E ——钢材的弹性模量,E = 2.06×105N∕mm2,同式(53)0
表G.2柔性附着塔身计算长度系数円值
|
KI |
0.00 |
().01 |
0.05 |
0.25 |
1.00 | |
|
G∕∕β2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 | |
|
附着道数n =1 | ||||||
|
//Zo |
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 |
4.90 4.69 4.51 3.85 3.70 3.58
3.06 2.97 2.89 2.87 2.79 2.73 2.74 2.67 2.62 2.64 2.59 2.54 2.57 2.52 2.48 2∙51 2.46 2.43 2.46 2.42 2.39 2.42 2.38 2.35 2.39 2.35 2.33
|
4.92 4.71 4.53 3.86 3.72 3.59 3.36 3.25 3.15 3.07 2.98 2.90 2.88 2.80 2.74 2.75 2.68 2.63 2.65 2.59 2.55 2.58 2.53 2.48 2.52 2.47 2.43 2.47 2.43 2.39 2.43 2.39 2.36 2.40 2.36 2.33 2∙37 2.33 2.31 |
5.01 4.80 4.61 3.94 3.79 3.66
3.12 3.03 2.95 2.92 2.85 2.78 2.79 2.72 2.66 2.69 2.63 2.57 2.61 2.55 2.51 2.55 2.50 2.46 2.49 2.45 2.41 2.45 2.41 2.38
2.39 2.35 2.32 |
4.33 4.16 4.01 3.73 3.59 3.47 3.37 3.26 3.16 3.14 3.04 2.96 2.97 2.89 2.82 2.85 2.77 2.71 2.75 2.68 2.63 2.67 2.61 2.57 2.61 2.56 2.51
2.52 2.47 2.43 2.48 2.44 2.40 |
5.57 5.32 5.11 4.64 4.45 4.28 4.09 3.93 3.79 3.73 3.59 3.47
3.28 3.18 3.09 3.14 3.04 2.96 3.02 2.93 2.86 2.92 2.85 2.78 2.85 2.77 2.71 2.78 2.71 2.65 2.72 2.66 2.61 |
|
____________________________附着道数〃 =2____________________________ | ||||||
|
//Zo |
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 |
5.54 5.30 5.09 4.22 4.05 3.90 3.60 3.47 3.36 3.25 3.14 3.05 3.02 2.93 2.86 2.86 2.79 2.72 2.75 2.68 2.63 2.66 2.60 2.55 2.59 2.54 2.49 2.53 2.49 2.45 2.49 2.44 2.41 2.45 2.41 2.37 2.42 2.38 2.35 |
5.58 5.34 5.12 4.25 4.08 3.93 3.63 3.50 3.38 3.27 3.16 3.07 3.04 2.95 2.88 2.88 2.80 2.74 2.76 2.70 2.64 2.67 2.61 2.56 2.60 2.55 2.50 2.55 2.50 2.46 2.50 2.45 2.42 2.46 2.42 2.38 2.43 2.39 2.36 |
5.75 5.49 5.27 4.39 4.21 4.05 3.74 3.60 3.48 3.36 3.25 3.16 3.12 3.03 2.95 2.95 2.87 2.80 2.83 2.76 2.69 2.73 2.67 2.61 2.66 2.60 2.55 2.59 2.54 2.50 2.54 2.49 2.45 2.50 2.46 2.42 2.46 2.42 2.39 |
4.97 4.76 4.58 4.19 4.02 3.88 3.73 3.59 3.48 3.43 3.31 3.21 3.21 3.11 3.03 3.06 2.97 2.89 2.94 2.86 2.79 2.84 2.77 2.71 2.76 2.69 2.64 2.70 2.63 2.58 2.64 2.58 2.54
|
8.20 7.82 7.50 6.04 5.77 5.54 4.98 4.77 4.59 4.36 4.18 4.03
3.66 3.53 3.41 3.44 3.32 3.23 3.28 3.17 3.08 3.14 3.05 2.97 3.04 2.95 2.87
2.87 2.80 2.73 2.81 2.74 2.68 |
表G.2 (续)
|
KI |
0.00 |
0.01 |
0.05 |
0.25 |
1.00 | |
|
ɪɑl /<«2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 |
1.0 1.1 1.2 | |
|
附着道数fi =3 | ||||||
|
//Zo |
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 |
4.28 4.11 3.96 3.63 3.50 3.39 3.27 3.16 3.07 3.03 2.95 2.87 2.87 2.80 2.73 2.76 2.69 2.63
2.60 2.54 2.50 2.54 2.49 2.45 2.49 2.45 2.41 2.45 2.41 2.38 2.42 2.38 2.35 |
5.71 5.45 5.23 4.31 4.13 3.98 3.66 3.52 3.41 3.29 3.18 3.09 3.06 2.96 2.89 2.89 2.81 2.75 2.77 2.70 2.65 2.68 2.62 2.57 2.61 2.56 2.51 2.55 2.50 2.46 2.50 2.46 2.42 2.46 2.42 2.39 2.43 2.39 2.36 |
5.85 5.59 5.36 4.43 4.25 4.09 3.76 3.62 3.50 3.38 3.26 3.17 3.13 3.04 2.95 2.96 2.88 2.81 2.83 2.76 2.70 2.74 2.67 2.62 2.66 2.60 2.55 2.60 2.54 2.50 2.55 2.50 2.46 2∙50 2.46 2.42 2.47 2.42 2.39 |
6.61 6.31 6∙O5 4.98 4.77 4.59 4.20 4.03 3.89 3.73 3.60 3.48 3.43 3.32 3.22 3.22 3.12 3.03 3.06 2.97 2.89 2.94 2.86 2.79 2.84 2.77 2.71 2.76 2.70 2.64 2.70 2.64 2.59 2.64 2.59 2.51 2.60 2.54 2.50 |
8.76 8.36 8.01 6.39 6.10 5.85
4.09 3.93 3.80 3.78 3.64 3.52
3.37 3.26 3.16
3.11 3.02 2.94 3.01 2.93 2.85 2.93 2.85 2.79 2.86 2.79 2.73 |
|
附看道数”24 | ||||||
|
//Z0 |
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 |
5.70 5.45 5.23 4.29 4.12 3.96 3.64 3.50 3.39 3.27 3J6 3.07 3.04 2.95 2.87 2.88 2∙80 2.73 2.76 2.69 2.63 2.67 2.61 2.56 2.60 2.54 2.50 2.54 2.49 2.45 2.49 2.45 2.41 2.45 2.41 2.38 2.42 2.38 2.35 |
5.73 5.48 5.26 4.32 4.14 3.99 3.66 3.53 3.41 3.29 3.18 3.09 3.06 2.97 2.89 2.89 2.82 2.75 2.77 2.71 2.65 2.68 2.62 2.57 2.61 2.56 2.51 2.55 2.50 2.46 2.50 2.46 2.42 2.46 2.42 2.39 2.43 2.39 2.36 |
5.86 5.60 5.37 4.43 4.25 4.09 3.76 3.62 3.50 3.38 3.27 3.17 3.13 3.04 2.95 2.96 2.88 2.81 2.83 2.76 2.70 2.74 2.67 2.62 2.66 2.60 2.55 2.60 2.54 2.50 2.55 2.50 2.46 2.50 2.46 2.42 2.47 2.42 2.39 |
6.62 6.32 6.06 4.99 4.78 4.60 4.20 4.03 3.89 3.74 3.60 3∙48 3.43 3.32 3.22 3.22 3.12 3.03 3.06 2.97 2.90 2.94 2.86 2.79 2.84 2.77 2.71 2.76 2.70 2.64 2.70 2.64 2.59 2.64 2.59 2.54 2.60 2.54 2.50 |
6.40 6.11 5.86
3.37 3.26 3.16
3.02 2.93 2.86 2.94 2.86 2.79 2.87 2.79 2.73 |
示例:
具有3道附着支撑的塔机(见图G.4)∙上部悬臂段长度为/.对应的截面抗弯惯性矩为.其下的塔身附着间距为
/・对应的塔身截面抗弯惯性矩为Lle已知U ∕o=0.7√tt,/ /.2 = 1.1,塔身及附着架的无量纲柔度系数KZ=O.05.
/ FI
则査表得计算K度系数"=2∙88,则悬臂段/的计算长度为2.88/.即其欧拉临界力可表示为 N"]点
V Z.oo< )
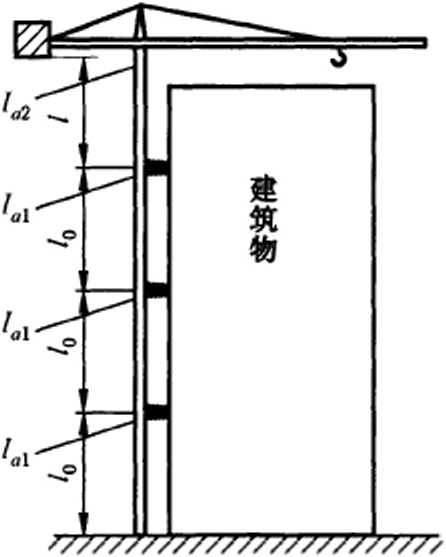
图G∙4附着塔身及其有关参数示意图
G.1∙3变截面结构件的计算长度系数〃 2
变截面结构件的计算长度系数μ2 ,可按截面惯性矩变化形式,从表G.3、表G.4、表G.5中插值选取,此 时取该变截面构件的最大截面惯性矩IgX作为计算用的截面惯性矩。计算等截面构件时取为Io
表G.3变截面构件计算长度系数〃2值
|
变截面形式 |
I mιn / ʃ m∙x |
卩2 |
变截面形式 |
ʃ min / ʃ max | ||
|
0.01 |
1.30/1.61 |
r<Al |
0.01 |
1.92/2.40 | ||
|
0.05 |
1.26/1.52 |
0.05 |
1.46/1.88 | |||
|
0.1 |
1.23/1.45 |
0.1 |
1.35/1.66 | |||
|
0.2 |
1.19/1.35 |
I呈抛物线变化 |
0.2 |
1.25/1.45 | ||
|
I______________________________________I I呈线性变化 |
0.4 |
1.12/1.21 |
0.4 |
1.14/1.24 | ||
|
0.6 |
1.07/1.13 |
0.6 |
1.08/1.13 | |||
|
0.8 |
1.03/1.06 |
0.8 |
1.03/1.05 | |||
|
0.01 |
1.95/2.83 |
0.01 |
2.14/3.16 | |||
|
0.05 |
1.55/2.01 |
0.05 |
1.61/2.11 | |||
|
f=r— |
L |
0.1 |
1.40/1.73 |
0.1 |
1.43/1.78 | |
|
0.2 |
1.27/1.48 |
0.2 |
1.28/1.50 | |||
|
I呈三次变化 |
0.4 |
1.15/1.25 |
I呈四次变化 |
0.4 |
1.15/1.26 | |
|
0.6 |
1.08/1.13 |
0.6 |
1.08/1.14 | |||
|
0.8 |
1.03/1.06 |
0.8 |
1.03/1.06 | |||
|
注:对悬臂支撑构件(∕gX端固定,Lm端自由,外=2),取分子值;对两端钗支的构件(灼=1),取分母值。 | ||||||
表G∙4两端钗支对称变截面构件计算长度系数“2值
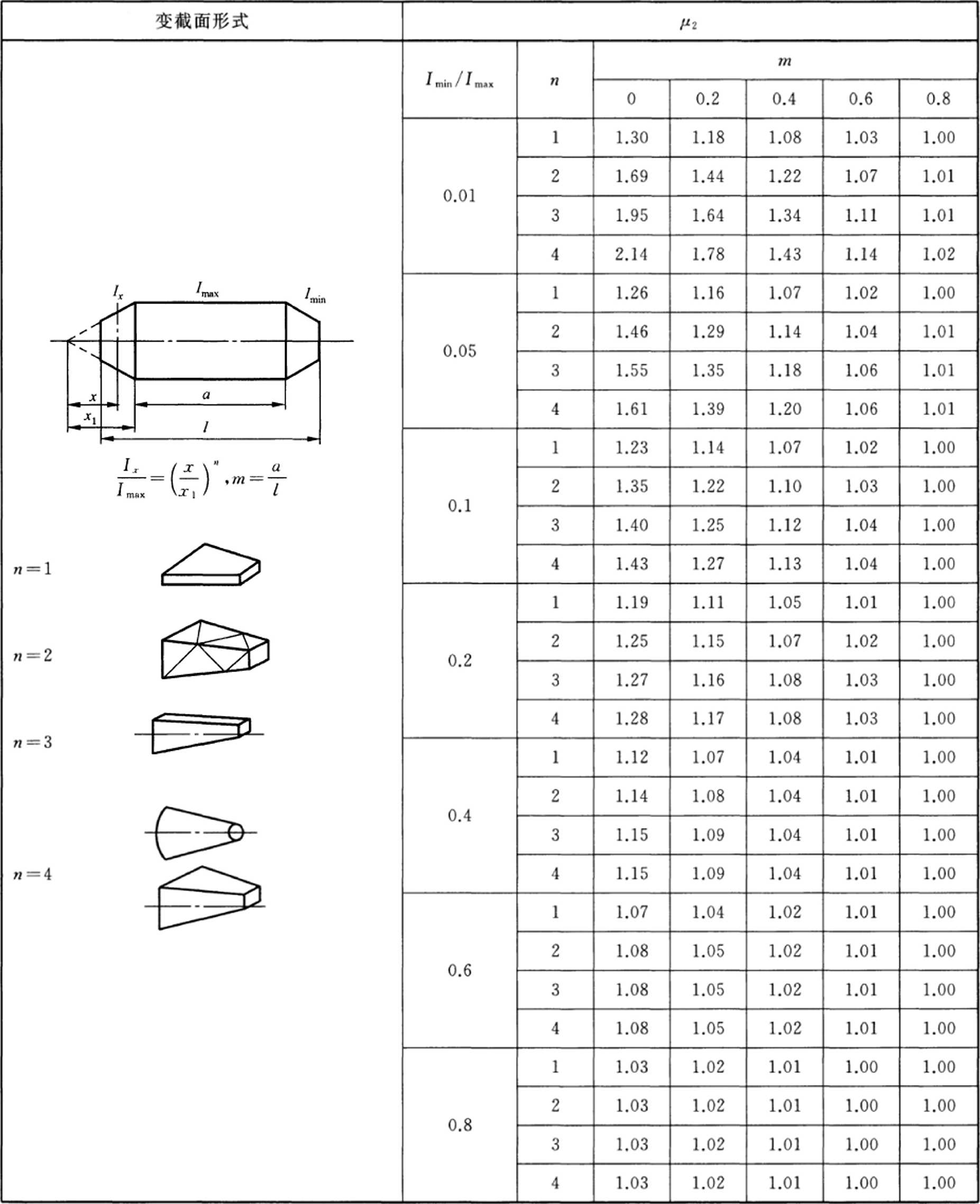
表G∙5阶梯变截面构件计算长度系数值
|
all |
Ll∕∕-2 | |||||||||
|
2.5 |
2.25 |
2.00 |
1.75 |
1.50 |
1.25 |
1.00 | ||||
|
0.01 |
1.58/1.58 |
1.50/1.50 |
1.41/1.41 |
1.32/1.32 |
1.22/1.22 |
1.12/1.12 |
1.00/1.00 | |||
|
——ɪ- |
0.10 |
1.49/1.58 |
1.42/1.50 |
1.34/1.41 |
E27/1.32 |
1.18/1.22 |
1.10/1.12 |
1.00/1.00 | ||
|
<* |
0.20 |
1.39/1.56 |
1.33/1.48 |
1.27/1.40 |
1.21/1.31 |
1.14/1.22 |
1.07/1.11 |
1.00/1.00 | ||
|
B |
0.30 |
1.30/1.52 |
1.26/1.44 |
1.21/1.36 |
1.16/1.28 |
1.11/1.20 |
1.05/1.10 |
1.00/1.00 | ||
|
0.40 |
1.22/1.45 |
1.18/1.38 |
1.15/1.31 |
1.11/1.24 |
1.07/1.16 |
1.04/1.08 |
l.OO/LOO | |||
|
/ |
0.50 |
1.14/1.35 |
1.12/1.30 |
1.09/1.24 |
1.07/1.18 |
1.05/1.12 |
1.02/1.06 |
1.00/1.00 | ||
|
I |
0.60 |
1.08/1.24 |
1.06/1.20 |
1.05/1.16 |
1.04/1.12 |
1.02/1.08 |
1.01/1.04 |
1.00/1.00 | ||
|
Y - |
0.70 |
1.03/1.13 |
1.03/1.10 |
1.02/1.08 |
1.02/1.06 |
1.01/1.04 |
1.01/1.02 |
1.00/1.00 | ||
|
0.80 |
1.01/1.04 |
1.01/1.03 |
1.01/1.03 |
1.00/1.02 |
1.00/1.01 |
1.00/1.01 |
1.00/1.00 | |||
|
0.90 |
1.00/1.01 |
1.00/1.00 |
1.00/1.00 |
1.00/1.00 |
1.00/1.00 |
1.00/1.00 |
1.00/1.00 | |||
|
1.00 |
1.00/1.00 |
1.00/1.00 |
1.00/1.00 |
LOO/1.00 |
1.00/1.00 |
1.00/1.00 |
1.00/1.00 | |||
注1:对悬臂支撑构件(九:端固定、九2端自由,灼=2),取分子值;对两端钗支的构件(同=1),取分母值。
注2:对多阶梯变截面构件可用相同的方法反复运用,每次减少一个截面数量:,最终得到一个等效的等截面 构件。
示例1:
三节阶梯变截面悬臂支撑构件计算长度系数按下列方法确定: 已知 /1 , Zz , Z3 = 4 S 3 S 3t∕α]∕∕βj = Illt/1β3 = 1.5β
先对图a)上部臂节2和3子结构求计算长度系数。由L2〃. 3 = L5,Q∕∕ = ∕2∕(∕2+∕3) = O.5,査表G.5分子值得 μ2 = l.O5β
再对等效二节阶梯变截面构件图b)求计算长度系数。由毕■ = 1.5,斗=7~H "— K= 山
Ilt2 I Ii +a<2(∕∣ ÷∕2) 4÷l.O5× (3 + 3)
0.388,査表G.5分子值得 以= 1.077。
最后得三节阶梯变載面悬臂构件的计算长度系数:
μ2≈μ2 ・[Z∣+∕4 ・(/?+厶)]∕(L+L+L) = l∙077X[4+1.05X(3 + 3)]∕(4 + 3 + 3) = l.ll
Tt? FJ Jr- Irr
即对应的欧拉临界力为:NY = - — v > X2 = Fnyl IlVf/ J-/ J-/ yil2
(灼 XrX/) L2X 1.11 ×+Z2÷∕3)J
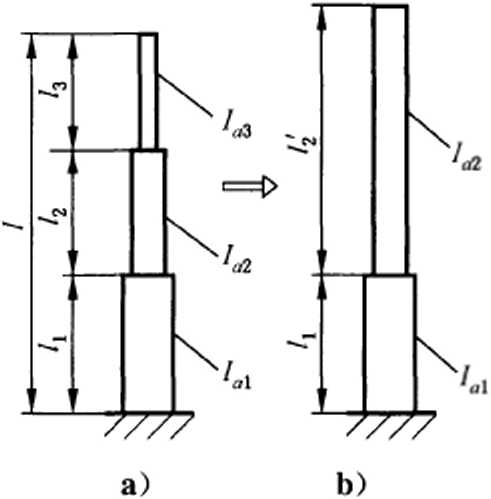
示例2:
三节阶梯变截面两端钗支构件计算K度系数按下列方法确定:
假定构件几何参数同上,先对上部臂节2和3子结构査表G.5分母值得
对所得的等效二节阶梯变截面构件查表G.5分母值得计算长度系数:房= 1.174。
最后得三节阶梯变截面两端钗支柱的计算长度系数:
μ2=μi ・[/.+^2 ・(Z2÷Z3)]∕(Z1÷Z2+Z3) = 1.17×[4÷1.12×(3 + 3)]∕(4÷3 + 3) = 1.26
2 T 2 EW r
对应的欧拉临界力为:NE =- — 八)=rlv1 9βκxz∕ I / 1 / ∖∏2
(/Z1 ×μ2 ×∕)∙ Ll × 1.26X (Zl + Z2+/3)J
表G.5以外的二节阶梯变載面结构欧拉临界力及计算K度系数,可由求解下列失稳特征方程获得:
悬臂支撑二阶梯变截面结构失稳特征方程:
Sin(^l ×Z∣ )sin(^2 × h)—^2COS(^I ×∕1 )cos(^2 ×Z2)=0
两端钗支二阶梯变截面结构失稳特征方程:
龙ICoS(Al ×∕ι )sin(Λ2 X/2)÷^2sin(Λι XZl )cos(Λ2 XZ2)=0
式中 ik.≈ /(EIul)
解上述失稳特征方程,可得结构欧拉临界力NE ≈k^Elaι ,对应的计算长度系数为:
π IEl 八 "=∕"=7^√W7
G.1.4受有非保向力的受压构件的计算长度系数〃 3
G.1.4.1 通则
计算起重臂在回转平面内的稳定性时,如果起重臂拉索(包括动臂变幅起重臂端部的起升或变幅拉 臂钢丝绳)具有一定的侧向刚度,一般应考虑拉索非保向力的有利影响(即考虑拉索非保向力对起重臂 在回转平面内变形的阻碍作用);当不计起重臂支座的弹性影响时,考虑拉索非保向力有利影响的受压 构件的计算长度系数#3可按G.1.4.2、G.1.4.3确定。
对于所受外力为保向力的受压构件,或虽受有非保向力但可忽略其有利影响的受压构件,乂3取为I0
G.1.4.2动臂变幅或小车变幅单吊点起重臂的计算长度系数
对于动臂变幅起重臂或小车变幅单吊点起重臂,如果取OC段的长度为构件的几何长度(见图G.5 和图G.6),且取μi=2时,“3可按式(G.9)计算。
“3 = I- *^ ........................( G.9 )
乙I Ii
式中:
IA——动臂变幅起重臂或小车变幅单吊点起重臂的Oe段的长度,单位为毫米(mm),见图G.5和 图 0.6 ;
IB——动臂变幅起重臂或小车变幅单吊点起重臂的相关尺寸,单位为毫米(mm),见图G.5和 图 G.6。
图G.5动臂变幅起重臂
图G.6小车变幅单吊点起重臂
G.1.4.3小车变幅双吊点起重臂的计算长度系数%
G.1.4.3.1小车变幅双吊点起重臂计算长度系数〃 3的确定
对于小车变幅双吊点起重臂(见图G.7)和臂架中间部位有絞点的小车变幅双单吊点起重臂(见 图G.8),同时考虑两根起重臂拉索非保向力的影响,如果取OA段长度(即 ')为结构几何长度,内可取 表G.6〜表G.12中的分子值;如果取AB段长度(即W)为结构件几何长度”3可取表G.6〜表G.12中 的分母值。表G.6〜表G.12已考虑了起重臂的变截面和双拉索作用的影响,所以釆用了这些表格中的 后,应取卩 ∖ =/2=/4 = 1。
A点起重胥拉索力分解
B点起重冒拉索力分解
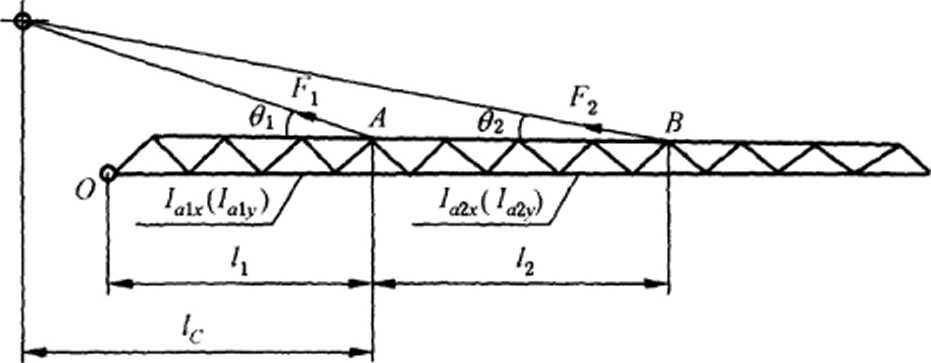
y
y
图G.7小车变幅双吊点起重臂(臂架中间部位无钗点)

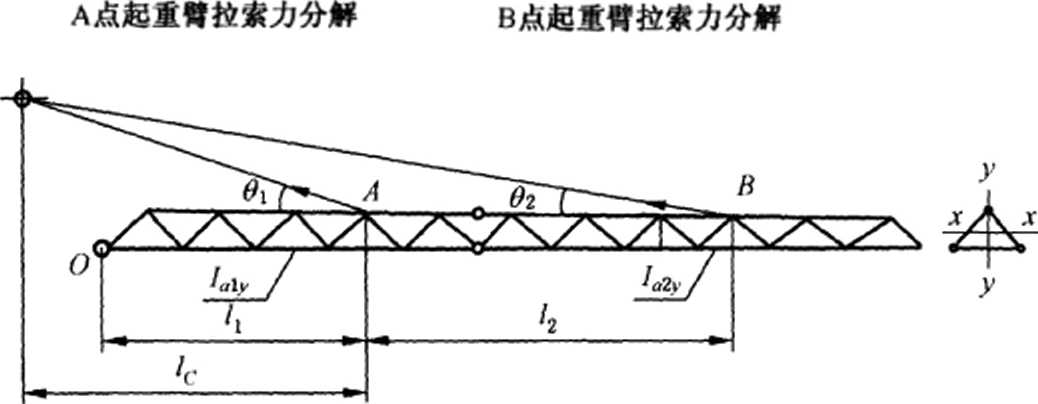
图G.8小车变幅双吊点起重臂(臂架中间部位有钗点)
图G.7、图G.8和表G.6〜表G.12中的各符号的含义如下:
l∣ J2 —分别为OA段起重臂和AB段起重臂的长度,单位为毫米(mm);
IC ——为拉索1(靠近起重臂根部饺点的拉索)在起重臂上的固定点与其上部固定点之间的
水平距离,单位为毫米(mm);
——分别为OA段起重臂和AB段起重臂截面对通过其截面形心的水平轴(即ʃ-ʃ轴)的 截面惯性矩,单位为四次方毫米(mm,);
2y——分别为OA段起重臂和AB段起重臂截面对通过其截面形心的垂直轴(即 W 轴)的 截面惯性矩,单位为四次方毫米(mπ√);
F\、Fu—分别为起重臂拉索力Fl和巳在水平方向上的分力,单位为牛顿(N), Flx=FI ∙ COSOl ,F2x =F2 ∙ cos02 J
们.O2 ——分别为起重臂拉索1和拉索2与起重臂截面形心连线之间的夹角;
F1 .F2 ——所计算工况下的起重臂拉索力(内力),单位为牛顿(N),见G.1.4.3.2、图G.9o
对格构式三角形起重臂的截面惯性矩,应根据折算长细比按式(G.10)进行惯性矩折算。
L=I忌),Lf (⅛) ........................( G-IO)
式中:
KJy —起重臂分别对虚轴7-1和yv的截面惯性矩;
It., Jhy——起重臂分别对虚轴I-Z和 W 的折算截面惯性矩;
Md-V ——起重臂分别对虚轴『7和才3的长细比;
摭八如,——起重臂分别对虚轴LZ和的折算长细比。
G.1.4.3.2双吊点起重臀拉索力的计算
G.1.4.3.2.1双吊点起重臂拉索力的计算模型见图G.9,起重臂拉索力已、FZ分别按式(G.11)和 式(G.12)计算。
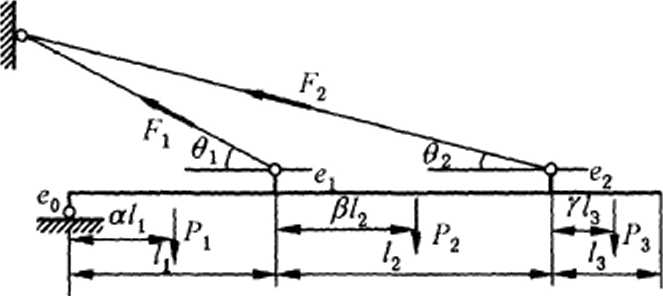

厶P 奇"
(G.ll )
Fl =-F2N2 + Np ........................( G.12 )
式中:
Δp ——力法广义荷载位移,按式(G.13)计算;
8 —力法位移系数,按式(G.14)计算;
N2 —拉索力巳为单位力时引起的拉索力Fl的内力,按式(G.15)计算;
Np 亠一载荷(吊重)P,和自重0引起的拉索力Fl的内力,按式(G.16)计算;
Fi^F2——起重臂拉索力(内力),单位为牛顿(N)。
.."∞S^1 (COS•— N2COi=β∖ ) ∕V21 Z2 ( nr Z
△p= NP ―!——m~~-_ 一/ - ɪ X e2 cos^2 × [3P3 (Z2 + 27l 3) + 3P2l2β2
. ʌ Ol ʌ ɪ J 2 《
3q?此 +q3∕3(8∕2 +6Z3)] }
+ (,2 +,3)+02,;]+ Ii Sillff2 X Ps (2』2 + 37/3 ) + P」2 件(3 —B)+
+ ⅛
(CoM2 — N2c0M] ) X Np (2βo — e↑) cos^i + P3 (Z2 +7/3)+ P2β^2 + Pιθ∕ι(3^ — 2 — a2)
+ <∕3(4Z2Z3+2Z∣) + ⅝2^-g1Zfη
—(e2cos^2 + l2s∖nθ2 — N2ei X COs^I)X Np(e0 -2ei)× COMI
+ 2P3 (l2 +/Z3) + 2P2βl2 一 P M S _ 尸)+ 録3(&2+4厶.+ 饥片一4/] I
...............(G.13 )
+
cos2 + (COS— McosS )2
Ko2
+ 3e2z2∞s^2sin^2] +
⅛-{C(e0
OxS 1 i I
—β2)cos02 — (。0 — C )McosS —。Sine2〕2
+ e0 (COS^2 — NZCoSeI) X (e2cos02 + /2Sine2 —。】N2cos^∣)
(G.14 )
N2
(/ɪ +』2)Sine2 + (e0 +Gcos/
ZISin+ (e0 +e↑ )eosðI
(G.15 )
P `all + 卩2(/丨 +位2)+「3(1】+,2 + )+91 負/2 + q2,2(,l + /2/2)+^3/3(/1 +,2 +A/2)
/i SinS + (e0 +ex )cosθ↑
........................(G.16 )
E2A2 U EAOl
-∈ ,K 01 =
I ,Ko2 =
EA 02
(G.17
式中:
八匕、,3、。,、仪2、〃3——各相关尺寸,单位为毫米(mm),见图G.9;
pɪʃzʃɜ ——载荷(吊重),单位为牛顿(N),见图G.9;
5、<72、S —起重臂单位长度自重,单位为牛顿每毫米(N/mm);
ʃi J2 —分别为起重臂Z1J2臂段的截面惯性矩,单位为四次方毫米(mm4);
AOl、Ao2 —分别为起重臂∕1、厶臂段的截面积,单位为平方毫米(mm2);
Ko1 .K02 —分别为起重臂L、厶的轴向刚度,单位为牛顿每毫米(N/mm);
E ——钢材的弹性模量,E = 2.06×105N∕mm2,同式(53);
K1>K2 —分别为拉索1和拉索2的拉伸刚度,单位为牛顿每毫米(N/mm);
S..S2 ——分别为拉索1和拉索2的长度,单位为毫米(mm);
Ei>E2 ——分别为拉索1和拉索2材料的弹性模量,单位为牛顿每平方毫米
(N∕mm2);
A1.A2 ——分别为拉索1和拉索2的截面积,单位为平方臺米(mm2);
e0 ——起重臂根部钗接点到起重臂截面形心连线的垂直距离,单位为毫米
(mm),见图 G.9;
e1 g ―分别为拉索1和拉索2在起重臂上的固定点到起重臂截面形心连线的垂
直距离,单位为毫米(mm),见图G.9;
―分别为拉索1和拉索2与起重臂截面形心连线的夹角,单位为度(°),见 图 G.9;
式中其他符号同式(G.1D和式(G.12)。
G.1.4.3.2.2大多数情况下,双吊点起重臂拉索力可采用图G.10所示的简化模型计算,图中尺寸Z1. ,2、厶以及S\、S?为拉索1和拉索2的延长线与起重臂截面形心连线相交后得到的相应尺寸。起重臂拉 索力FI .F2仍按式(G.11)和式(G.12)计算,但厶P按式(G.18)计算,8按式(G.19)计算,M按式(G.20) 计算,Np按式(G.21)计算;而式(G.18)和式(G.19)中的Kl.K2仍按式(G.17)计算,但式(G.17)的S1. S2分别取为拉索1和拉索2的延长线与起重臂截面形心连线的交点到拉索上部固定点的距离,单位为 毫米(mm) O
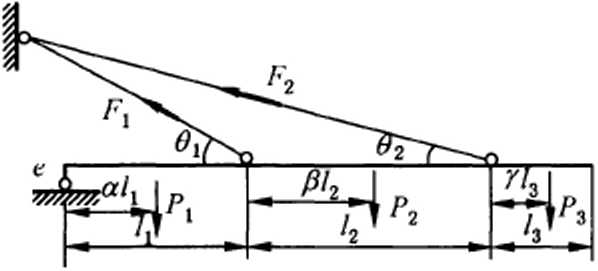
图G.10双吊点起重臂拉索力的简化计算模型图
A r., N2 Zhin
+丄
十6E'
O C 3q2ll ψg3Z3(8∕2 +6∕3)∏ P3(2Z2 ÷3∕∕3) ÷ P2l2β2(3-β) ÷ H2 2
€ ( COSe2 — N2 COSS) P3(+ "3)+ P?段2 + P 1I( 3。— 2 —
I 03(妲2,3 + 2厶 2 ) + 2饥/; — Ql 髯 cZJ 1 1 ∙ ZJ、,「Nr O
H--:--2eNpcosσ1 — Z2Sinσ2 X e∕Vrcosα1
OD Z , I λz> X IonQJ D I Z 3 ∖ I 93,3(&2 + 4』3)+ 4q∕ — g∣ [ + 2P3(l2 + /Z3) + 2P2βl2 -PJI (。一。‘)--;------------Jl
・...(
G.18 )
I Nl Iz SinT2 0 ----- -T- — 一 -4- ■■ ■
K2^ K. SEI2
3E∕1
{[e(cos^2 — N2cos^i ) — Z2sin^2]2 + 以2sin。?(cos/ — N2cosθ↑)}
∙∙∙( G.19 )
(ZI +/2)Sine 2 + ecos^2
(G.20 )
∕ι Sin^l + ecos0∣
N _ PIaZI + P2(∕1 + 禺 2)+ P3(∕1 +,2 + 〃3)+ qMf/2 + q2,2(/i + 厶/2) + sLUi + '2 + 厶/2)
P 11 Sin^I + eeos^ɪ
........................(G.21 )
式中:
厶、/2、厶、成1、仪2、咒3——各相关尺寸,单位为毫米(mm),其中Z1 J2 J3⅛拉索1和拉索2的延长 线与起重臂截面形心连线相交后得到的尺寸,见图G.10;
K1.K2 —仍按式(G.17)计算,但其中的Si、S2分别取为拉索1和拉索2的延长线
与起重臂截面形心连线的交点到拉索上部固定点的距离,单位为毫米 (mm),见图 G.10;
e ―起重臂根部饺接点到起重臂截面形心连线的垂直距离,单位为毫米
(mm),见图 G.10;
式中的其他符号同式(G.11)〜式(G.17)。
G.1.5考虑具有双轴向力作用的受压构件的计算长度系数H,
计算如图G.7、图G.8所示的小车变幅双吊点起重臂在起升平面内的稳定性时,一般应考虑起重臂 的整体性和双拉索力沿起重臂截面形心连线分力同时起作用的影响。对于考虑该影响的计算长度系数 內,如果取OA段长度(即I】)为结构件几何长度”,可取表G.13中的分子值;如果取AB段长度(即 厶)为结构件几何长度",可取表G.13中的分母值。表G.13已考虑了起重臂的变截面影响,所以采用 了表G.13中的#4后,应取“2 = 1。
表G.13中的符号同G.1.4.3.1o
对于不属于上述情况的受压构件,久可取为1或其他合理的值。
G.2等截面格构式构件的换算长细比如
等截面格构式构件的换算长细比摭见表G.14o
表G.6双吊点起重臂回转平面内计算长度系数〃 3(此时μ,=A2=M4 = D
|
∣<ιZy /L】y |
F2∕F2,+F ") |
〃2 | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.12/2.24 |
1.15/2.07 |
1.19/1.91 |
1.25/1.75 |
1.34/1.61 |
1.49/1.49 |
1.72/1.38 | |
|
1.0 |
0.50 |
1.41/2.00 |
1.48/1.88 |
1.57/1.77 |
1.68/1.67 |
1.84/1.56 |
2.07/1.46 |
2.42∕1∙37 |
|
0.75 |
1.68/1.94 |
1.77/1.84 |
L88/1.74 |
2.04/1.65 |
2.24/1.55 |
2.52/1.46 |
2.96/1.36 | |
|
LOO |
1.91/1.91 |
2.02/1.82 |
2.16/1.73 |
2.34/1.64 |
2.58/1.55 |
2.91/1.45 |
3.41/1.36 | |
|
0.25 |
1.14/2.10 |
1.18/L95 |
1.23/1.81 |
1.31/1.68 |
1.42/1.57 |
1.58/1.46 |
1.85/1.36 | |
|
0.85 |
0.50 |
1.47/1.91 |
1.54/1.81 |
1.65/1.72 |
1.78/1.62 |
1.96/1.53 |
2.21/1.44 |
2.60/1.36 |
|
0.75 |
1.75/1.86 |
1.86/1.78 |
1.99/1.69 |
2.16/1.61 |
2.39/1.52 |
2.70/1.44 |
3.18/1.35 | |
|
1.00 |
2.00/1.85 |
2.13/1.76 |
2.28/1.68 |
2.48/1.60 |
2.75/1.52 |
3.12/1.44 |
3.67/1.35 | |
表G∙6 (续)
|
Ft√(Fh+FG |
,/,2 | |||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.18/1.97 |
1.22/1.84 |
1.29/1.73 |
1.38/1.62 |
1.52/1.52 |
1.71/1.43 |
2.01/1.35 | |
|
0.70 |
0.50 |
1.54/1.83 |
1.64/1.74 |
1.76/1.66 |
1.91/1.58 |
2.12/1.50 |
2.41/1.42 |
2.84/1.34 |
|
0.75 |
1.86/1.80 |
1.98/1.72 |
2.13/1.65 |
2.33/1.57 |
2.58/1.50 |
2.94/1.42 |
3.47/1.34 | |
|
1.00 |
2.13/1.78 |
2.27/1.71 |
2.45/1.64 |
2.68/1.57 |
2.98/1.50 |
3.39/1.42 |
4.01/1.34 | |
|
0.25 |
1.24/1.84 |
1.30/1.74 |
1.39/1.65 |
1.51/1.57 |
1.67/1.49 |
1.90/1.41 |
2.25/1.34 | |
|
0.55 |
0.50 |
1.67/1.75 |
1.78/1.68 |
1.92/1.61 |
2.10/1.54 |
2.35/1.48 |
2.68/1.41 |
3.18/1.33 |
|
0.75 |
2.02/1.73 |
2.16/1.67 |
2.34/1.60 |
2.57/1.54 |
2.87/1.47 |
3.28/1.40 |
3.89/1.33 | |
|
1.00 |
2.32/1.72 |
2.49/1.66 |
2.70/1.60 |
2.96/1.54 |
3.31/1.47 |
3.78/1.40 |
4.49/1.33 | |
注:本表为Zι∕∕c = l. 1时求得O ZlJC见图G.7、图G.8。
表G.7双吊点起重臂回转平面内计算长度系数〃3(此时μ1=M2=μ4 = D
|
1山/Lb |
F2√(F2χ+Fu) |
IXIlI | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.16/2.32 |
1.19/2.14 |
1.23/1.97 |
1.29/1.80 |
1.38/1.65 |
1.52/1.52 |
1.75/1.40 | |
|
1.0 |
0.50 |
1.45/2.05 |
1.52/1.93 |
1.60/1.81 |
1.72/1.70 |
1.88/1.59 |
2.10/1.49 |
2.45/1.39 |
|
0.75 |
1.72/1.98 |
1.81/1.88 |
1.92/1.78 |
2.07/1.68 |
2.28/1.58 |
2.56/1.48 |
2.99/1.38 | |
|
1.00 |
1.95/1.95 |
2.06/1.86 |
2.20/1.76 |
2.38/1.67 |
2.62/1.57 |
2.95/1.48 |
3.45/1.38 | |
|
0.25 |
1.18/2.17 |
1.21/2.02 |
1.26/1.87 |
1.34/1.73 |
1.45/1.60 |
1.61/1.48 |
1.87/1.38 | |
|
0.85 |
0.50 |
1.50/1.96 |
1.58/1.85 |
1.68/1.75 |
1.81/1.65 |
1.99/1.56 |
2.25/1.46 |
2.63/1.37 |
|
0.75 |
1.79/1.91 |
1.89/1.82 |
2.03/1.73 |
2.20/1.64 |
2.42/1.55 |
2.74/1.46 |
3.22/1.37 | |
|
1.00 |
2.04/1.88 |
2.17/1.80 |
2.32/1.71 |
2.52/1.63 |
2.79/1.54 |
3.16/1.46 |
3.71/1.37 | |
|
0.25 |
1.21/2.03 |
1.26/1.89 |
1.32/1.77 |
1.41/1.66 |
1.55/1.55 |
1.74/1.46 |
2.04/1.36 | |
|
0.70 |
0.50 |
1.58/1.87 |
1.67/1.78 |
1.79/1.69 |
1.94/1.61 |
2.15/1.53 |
2.44/1.44 |
2.87/1.36 |
|
0.75 |
1.89/1.83 |
2.02/1.75 |
2.17/1.68 |
2.36/1.60 |
2.62/1.52 |
2.98/1.44 |
3.51/1.36 | |
|
1.00 |
2.17/1.81 |
2.31/1.74 |
2.49/1.67 |
2.72/1.59 |
3.02/1.52 |
3.44/1.44 |
4.06/1.36 | |
|
0.25 |
1.27/1.88 |
1.33/1.78 |
1.42/1.68 |
1.54/1.59 |
1.70/1.51 |
1.93/1.43 |
2.28/1.35 | |
|
0.55 |
0.50 |
1.70/1.78 |
1.81/1.71 |
1.95/1.64 |
2.13/1.57 |
2.38/1.50 |
2.71/1.42 |
3.21/1.35 |
|
0.75 |
2.05/1.76 |
2.20/1.69 |
2.38/1.63 |
2.60/1.56 |
2.90/1.49 |
3.32/1.42 |
3.93/1.35 | |
|
1.00 |
2.36/1.75 |
2.53/1.69 |
2.73/1.62 |
3.00/1.56 |
3.35/1.49 |
3.83/1.42 |
4.54/1.35 | |
注:本表为Zi/Zc = 1.05时求得O ZlJc见图G∙7、图G.&
表G∙8双吊点起重臂回转平面内计算长度系数出(此时Ml=M2=M4 = 1)
|
ʃeɛɔr /ʃɑIy |
FL/Fh ÷Fιx) |
Z∣∕∕2 | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0?25 |
1.20/2.41 |
1.23/2.22 |
1.27/2.03 |
1.33/1.86 |
1.41/1.69 |
1.55/1.55 |
1.78/1.42 | |
|
1 ∩ |
0.50 |
1.49/2.11 |
1.56/1.98 |
1.64/1.86 |
1.76/1.74 |
1.91/1.62 |
2.14/1.51 |
2.48/1.41 |
|
1 ∙U |
0.75 |
1.76/2.03 |
1.85/1.93 |
1.97/1.82 |
2.12/1.71 |
2.32/1.61 |
2.60/1.50 |
3.03/1.40 |
|
1.00 |
2.00/2.00 |
2.11/1.90 |
2.25/1.80 |
2.43/1.70 |
2.67/1.60 |
3.00/1.50 |
3.50/1.40 | |
|
0?25 |
1.22/2.25 |
1.26/2.09 |
1.30/1.92 |
1.37/1.77 |
1.48/1.64 |
1.64/1.51 |
1.90/1.40 | |
|
A Qc |
0.50 |
1.54/2.01 |
1.62/1.90 |
1.72/1.79 |
1.85/1.69 |
2.03/1.59 |
2.28/1.49 |
2.67/1.39 |
|
V.O0 |
0.75 |
1.83/1.95 |
1.94/1.86 |
2.07/1.76 |
2.24/1.67 |
2.46/1.57 |
2.78/1.48 |
3.26/1.39 |
|
1.00 |
2.09/1.93 |
2.21/1.84 |
2.37/1,75 |
2.57/1.66 |
2.84/1.57 |
3.21/1.48 |
3.76/1.39 | |
|
025 |
1.25/2.09 |
1.30/1.95 |
1.36/1.82 |
1.45/1.69 |
1.58/1.58 |
1.77/1.48 |
2.07/1.38 | |
|
Λ 7∩ |
0.50 |
1.62/1.91 |
1.71/1.82 |
1.82/1.73 |
1.98/1.64 |
2.18/1.55 |
2.47/1.46 |
2.91/1.38 |
|
V. / U |
0.75 |
1.93/1.87 |
2.06/1.79 |
2.21/1.71 |
2.40/1.62 |
2.66/1.54 |
3.02/1.46 |
3.56/1.37 |
|
1.00 |
2.21/1.85 |
2.36/1.77 |
2.54/1.70 |
2.76/1.62 |
3.07/1.54 |
3.48/1.46 |
4.10/1.37 | |
|
0?25 |
1.31/1.94 |
1.37/1.82 |
1.45/1.72 |
1.56/1.62 |
1.72/1.53 |
1.95/1.45 |
2.30/1.37 | |
|
Λ CC |
0.50 |
1.73/1.82 |
1.84/1.74 |
1.99/1.67 |
2.17/1.59 |
2.41/1.52 |
2.75/1.44 |
3.25/1.36 |
|
UeOO |
0.75 |
2.09/1.79 |
2.23/1.72 |
2.41/1.65 |
2.64/1.58 |
2.94/1.51 |
3.36/1.44 |
3.97/1.36 |
|
1.00 |
2.40/1.78 |
2.57/1.71 |
2.78/1.65 |
3.04/1.58 |
3.39/1.51 |
3.88/1.44 |
4.59/1.36 | |
注:本表为Z】/表=LO时求得o ZIJC见图G.7、图G.8。
表G.9双吊点起重臂回转平面内计算长度系数〃3(此时"l="2="4 = 1)
|
1 f /1 z |
Flr∕(Fz/+FG |
∕∣∕Z2 | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.25/2.51 |
1.28/2.31 |
1.31/2.11 |
1.37/1.92 |
1.45/1.74 |
1.59/1.59 |
1.81/1.45 | |
|
1.0 |
0.50 0.75 |
1.54/2.18 1.81/2.09 |
1.61/2.04 1.90/1.98 |
1.69/1.91 2.02/1.86 |
1.80/1.78 2.17/1.75 |
1.96/1.66 2.37/1.64 |
2.18/1.54 2.65/1.53 |
2.52/1.43 3.08/1.42 |
|
1.00 |
2.05/2.05 |
2.16/1.95 |
2.30/1.84 |
2.48/1.74 |
2.72/1.63 |
3.05/1.53 |
3.55/1.42 | |
|
0.25 |
1.27/2.34 |
1.30/2.16 |
1.35/1.99 |
1.42/1.83 |
1.52/1.68 |
1.67/1.54 |
1.93/1.42 | |
|
0.85 |
0.50 0.75 |
1.59/2.07 1.88/2.00 |
1.66/1.95 1.98/1.90 |
1.76/1.84 2.11/1.80 |
1.89/1.73 2.28/1.70 |
2.07/1.62 2.51/1.60 |
2.32/1.51 2.83/1.51 |
2.70/1.41 3.31/1.41 |
|
1.00 |
2.14/1.97 |
2.26/1.88 |
2.42/1.79 |
2.62/1.69 |
2.80/1.60 |
3.26/1.50 |
3.81/1.41 | |
|
0.25 |
1.30/2.17 |
1.34/2.02 |
1.40/1.87 |
1.48/1.74 |
1.61/1.62 |
1.80/1.51 |
2.09/1.40 | |
|
0.70 |
0.50 0.75 |
1.66/1.96 1.98/1.91 |
1.75/1.86 2.10/1.83 |
1.86/1.77 2.25/1.74 |
2.02/1.67 2.45/1.65 |
2.22/1.58 2.71/1.57 |
2.51/1.49 3.07/1.48 |
2.95/1.39 3.60/1.39 |
|
1.00 |
2.26/1.89 |
2.40/1.81 |
2.58/1.73 |
2.81/1.65 |
3.12/1.56 |
3.54/1.48 |
4.16/1.39 | |
|
0.25 |
1.35/2.00 |
1.41/1.88 |
1.49/1.76 |
1.60/1.66 |
1.76/1.56 |
1.98/1.47 |
2.33/1.38 | |
|
0.55 |
0.50 0.75 |
1.77/1.86 2.13/1.83 |
1.88/1.78 2.28/1.75 |
2.02/1.70 2.46/1.68 |
2.21/1.62 2.69/1.61 |
2.45/1.54 2.99/1.54 |
2.79/1.46 3.41/1.46 |
3.29/1.38 4.02/1.38 |
|
1.00 |
2.44/1.81 |
2.61/1.74 |
2.82/1.68 |
3.09/1.61 |
3.44/1.53 |
3.93/1.46 |
4.64/1.38 | |
注:本表为∕>∕ Zc =0.95时求得o ZIJC见图G∙7、图G.8o
表GJO双吊点起重臂回转平面内计算长度系数〃 3(此时Fi=M2=M4 = D
|
ʃι2y /ʃɑljr |
F2x/(F2x+Fj,) |
__Illll______________________________________________ | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.31/2.62 |
1.34/2.40 |
1.37/2.19 |
1.42/1.99 |
1.50/1.80 |
1.63/1.63 |
1.84/1.47 | |
|
1.0 |
0.50 0.75 |
1.59/2.25 1.87/2.15 |
1.66/2.11 1.96/2.03 |
1.74/1.97 2.07/1.91 |
1.85/1.83 2.22/1.79 |
2.00/1.70 2.42/1.68 |
2.23/1.57 2.70/1.56 |
2.57/1.45 3.13/1.45 |
|
1.00 |
2.11/2.11 |
2.22/2.00 |
2.36/1.89 |
2.54/1.78 |
2.78/1.67 |
3.11/1.56 |
3.61/1.44 | |
|
0.25 |
1.33/2.44 |
1.36/2.25 |
1.40/2.06 |
1.46/1.89 |
1.56/1.72 |
1.71/1.58 |
1.96/1.45 | |
|
0.85 |
0.50 0.75 |
1.64/2.14 1.93/2.06 |
1.71/2.01 2.04/1.95 |
1.81/1.89 2.17/1.84 |
1.94/1.77 2.33/1.74 |
2.11/1.65 2.56/1.64 |
2.36/1.54 2.88/1.53 |
2.75/1.43 3.36/1.43 |
|
1.00 |
2.19/2.02 |
2.32/1.92 |
2.48/1.83 |
2.68/1.73 |
2.94/1.63 |
3.32/1.53 |
3.87/1.43 | |
|
0.25 |
1.35/2.26 |
1.39/2.09 |
1.45/1.93 |
1.53/1.79 |
1.65/1.65 |
1.83/1.53 |
2.13/1.42 | |
|
0.70 |
0.50 0.75 |
1.71/2.02 2,03/1.96 |
1.79/1.91 2.15/1.87 |
1.91/1.81 2.30/1.78 |
2.06/1.71 2.50/1.69 |
2.27/1.61 2.76/1.60 |
2.55/1.51 3.12/1.51 |
2.99/1.41 3.65/1.41 |
|
1.00 |
2.31/1.94 |
2.46/1.85 |
2.64/1.77 |
2.87/1.68 |
3.17/1.59 |
3.59/1.50 |
4.22/1.41 | |
|
0.25 |
1.39/2.07 |
1.45/1.93 |
1.53/1.81 |
1.63/1.70 |
1.79/1.59 |
2.02/1.50 |
2.36/1.40 | |
|
0.55 |
0.50 0.75 |
1.81/1.90 2.18/1.87 |
1.92/1.82 2.32/1.79 |
2.06/1.73 2.50/1.71 |
2.25/1.65 2.73/1.64 |
2.49/1.57 3.04/1.56 |
2.83/1.48 3.46/1.48 |
3.33/1.40 4.08/1.40 |
|
1.00 |
2.49/1.85 |
2.66/1.78 |
2.88/1.71 |
3.15/1.63 |
3.50/1.56 |
3.99/1.48 |
4.70/1.40 | |
|
注:本表为Zi/ ZC=O.9 |
时求得1、 |
ZC见图 G.7、图 G.8β | ||||||
表GJl双吊点起重臂回转平面内计算长度系数〃 3(此时Mι=μ2=M4 = D
|
∕β2,r/ʃɑIy |
F2χ∕(F2χ÷F1,) |
∕ι∕Z2 __ | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.37/2.74 |
1.39/2.51 |
1.43/2.28 |
1.48/2.07 |
1.55/1.86 |
1.67/1.67 |
1.88/1.51 | |
|
1.0 |
0.50 0.75 |
1.65/2.33 1.92/2.22 |
1.71/2.18 2.01/2.09 |
1.79/2.03 2.13/1.97 |
1.90/1.88 2.28/1.84 |
2.06/1.74 2.48/1.72 |
2.28/1.61 2.76/1.59 |
2.62/1.48 3.19/1.47 |
|
1.00 |
2.17/2.17 |
2.28/2.06 |
2.42/1.94 |
2.60/1.82 |
2.84/1.70 |
3.17/1.59 |
3.68/1.47 | |
|
0.25 |
1.38/2.55 |
1.41/2.34 |
1.45/2.14 |
1.51/1.95 |
1.61/1.78 |
1.75/1.62 |
2.00/1.48 | |
|
0.85 |
0.50 0.75 |
1.69/2.21 1.99/2.12 |
1.77/2.07 2.09/2.00 |
1.86/1.94 2.22/1.89 |
1.99/1.81 2.39/1.78 |
2.16/1.69 2.62/1.67 |
2.41/1.57 2.94/1.56 |
2.80/1.46 3.41/1.45 |
|
1.00 |
2.25/2.08 |
2.38/1.97 |
2.54/1.87 |
2.74/1.77 |
3.01/1.66 |
3.38/1.56 |
3.93/1.45 | |
|
0.25 |
1.40/2.35 |
1.44/2.17 |
1.50/2.00 |
1.57/1.84 |
1.69/1.70 |
1.87/1.57 |
2.16/1.45 | |
|
0.70 |
0.50 0.75 |
1.76/2.08 2.08/2.01 |
1.84/1.96 2.20/1.92 |
1.96/1.85 2.35/1.82 |
2.11/1.75 2.55/1.72 |
2.31/1.64 2.81/1.63 |
2.60/1.54 3.17/1.53 |
3.04/1.44 3.71/1.43 |
|
1.00 |
2.37/1.98 |
2.52/1.89 |
2.70/1.80 |
2.93/1.71 |
3.23/1.62 |
3.66/1.53 |
4.28/1.43 | |
|
0?25 |
L45/2.14 |
1.50/2.00 |
1.57/1.86 |
1.68/1.74 |
1.83/1.63 |
2.05/152 |
2.40/1.42 | |
|
∩ cς |
0.50 |
1.86/1.95 |
1.97/1.86 |
2.11/1.77 |
2.29/1.68 |
2.54/1.60 |
2.88/1.51 |
3.38/1.42 |
|
v∙ ɔɔ |
0.75 |
2.23/1.91 |
2.37/1.83 |
2.55/1.75 |
2.78/1.67 |
3.09/1.59 |
3.51/1.50 |
4.13/1.42 |
|
1.00 |
2.55/1.89 |
2.72/1.82 |
2.93/1.74 |
3.20/1.66 |
3.56/1.58 |
4.05/1.50 |
4.77/1.42 | |
注:本表为Z1/Zc = 0.85时求得O ZluC见图G∙7、图G∙8°
表G∙12双吊点起重臂回转平面内计算长度系数〃3(此时μ1=μ2=μ4 = 1)
|
/«Z.y/ ʃɑɪ^ |
Fz,∕(F2,+F1x) |
___________________________________________IXlit___________________________________________ | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
1.43/2.86 |
1.45/2.62 |
1.49/2.38 |
1.54/2.15 |
1.61/1.93 |
1.72/1.72 |
1.93/1.54 | |
|
1.0 |
0.50 0.75 |
1.71/2.42 1.99/2.30 |
1.77/2.26 2.08/2.16 |
1.85/2.10 2.19/2.03 |
1.96/1.94 2.34/1.89 |
2.11/1.79 2.54/1.76 |
2.33/1.65 2.82/1.63 |
2.67/1.51 3.25/1.50 |
|
1.00 |
2.24/2.24 |
2.35/2.12 |
2.49/1.99 |
2.67/1.87 |
2.91/1.75 |
3.25/1.62 |
3.75/1.50 | |
|
0.25 |
1.44/2.66 |
1.47/2.44 |
1.51/2.23 |
1.57/2.03 |
1.66/1.84 |
1.80/1.66 |
2.05/1.51 | |
|
0.85 |
0.50 0.75 |
1.75/2.28 2.05/2.18 |
1.82/2.14 2.15/2.06 |
1.92/2.00 2.28/1.94 |
2.04/1.87 2.45/1.83 |
2.22/1.73 2.68/1.71 |
2.47/1.61 3.00/1.60 |
2.85/1.49 3.48/1.48 |
|
1.00 |
2.32/2.14 |
2.45/2.03 |
2.60/1.92 |
2.81/1.81 |
3.07/1.70 |
3.45/1.59 |
4.01/1.48 | |
|
0.25 |
1.46/2.45 |
1.50/2.26 |
1.55/2.08 |
1.63/1.90 |
1.74/1.75 |
1.92/1.60 |
2.21/1.48 | |
|
0.70 |
0.50 0.75 |
1.81/2.15 2.14/2.07 |
1.90/2.02 2.26/1.97 |
2.01/1.90 2.41/1.86 |
2.16/1.79 2.61/1.76 |
2.36/1.68 2.87/1.66 |
2.65/1.57 3.23/1.56 |
3.09/1.46 3.77/1.46 |
|
1.00 |
2.43/2.04 |
2.58/1.94 |
2.76/1.85 |
2.99/1.75 |
3.30/1.66 |
3.72/1.56 |
4.35/1.46 | |
|
0.25 |
1.50/2.22 |
1.55/2.07 |
1.62/1.92 |
1.72/1.79 |
1.87/1.67 |
2.10/1.55 |
2.44/1.45 | |
|
0.55 |
0.50 0.75 |
1.91/2.01 2.28/1.96 |
2.02/1.91 2.43/1.87 |
2.16/1.81 2.61/1.79 |
2.34/1.72 2.84/1.70 |
2.58/1.63 3.15/1.62 |
2.93/1.53 3.57/1.53 |
3.43/1.44 4.20/1.44 |
|
1.00 |
2.61/1.93 |
2.78/1.85 |
2.99/1.78 |
3.27/1.70 |
3.62/1.61 |
4.12/1.53 |
4.84/1.44 | |
注:本表为IJ ZC=O.8时求得O ZIjC见图G.7、图G∙8°
表G.13双吊点起重臂起升平面内计算长度系数〃 H此时F2 = D
|
ʃu2jt /ʃulʃ |
F"Fz,+Fj) |
______________________________________Ijl2______________________________________ | ||||||
|
1.0 |
0.9 |
0.8 |
0.7 |
0.6 |
0.5 |
0.4 | ||
|
0.25 |
0.87/1.73 |
0.88/1.58 |
0.90/1.43 |
0.92/1.29 |
0.95/1.14 |
1.00/1.00 |
1.10/0.88 | |
|
1.0 |
0.50 |
0.90/1.27 |
0.92/1.17 |
0.96/1.08 |
1.00/0.99 |
1.08/0.92 |
1.21/0.86 |
1.43/0.81 |
|
0.75 |
0.94/1.09 |
0.98/1.02 |
1.04/0.96 |
1.12/0.91 |
1.25/0.86 |
1.43/0.83 |
1.72/0.80 | |
|
0.25 |
0.88/1.63 |
0.90/1.49 |
0.91/1.35 |
0.94/1.21 |
0.97/1.07 |
1.03/0.95 |
1.15/0.84 | |
|
0.85 |
0.50 |
0.92/1.20 |
0.95/1.11 |
0.98/1.03 |
1.04/0.95 |
1.13/0.88 |
1.27/0.83 |
1.52/0.79 |
|
0.75 |
0.97/1.04 |
1.02/0.98 |
1.08/0.92 |
1.18/0.88 |
1.31/0.84 |
1.52/0.81 |
1.84/0.78 | |
|
0.25 |
0.90/1.51 |
0.92/1.38 |
0.94/1.25 |
0.96/1.13 |
1.00/1.00 |
1.07/0.89 |
1.21/0.81 | |
|
0.70 |
0.50 |
0.95/1.12 |
0.98/1.04 |
1.02/0.97 |
1.09/0.90 |
1.19/0.85 |
1.36/0.81 |
1.64/0.77 |
|
0.75 |
1.02/0.98 |
1.07/0.93 |
1.14/0.88 |
1.25/0.85 |
1.41/0.81 |
1.63/0.79 |
1.99/0.77 | |
|
0.25 |
0.92/1.37 |
0.94/1.26 |
0.96/1.14 |
0.99/1.03 |
1.04/0.92 |
1.13/0.84 |
1.31/0.78 | |
|
0.55 |
0.50 |
0.98/1.03 |
1.02/0.96 |
1.08/0.90 |
1.16/0.85 |
1.29/0.81 |
1.49/0.78 |
1.81/0.76 |
|
0.75 |
1.07/0.92 |
1.14/0.88 |
1.23/0.84 |
1.36/0.81 |
1.54/0.79 |
1.80/0.77 |
2.20/0.75 | |
表G∙14等截面格构式构件的换算长细比如
|
构件截面形式 |
缀材类别 |
计算公式_____ |
符号意义 |
|
» |
綴板 |
Xhy= + 財 |
Av——整个构件对虚轴W的长细比; 义;——单肢对1-1轴的长细比,其计算长度 取綴板间的净距离 |
|
缀条 |
M=M+27 需 |
AR ——构件横截面所截各弦杆(主肢)的毛 截面面积之和; ARl—构件横截面所截各斜缀条的毛截面 面积之和 | |
|
綴板 |
义“ =+居 扁=√∑ΓW |
A r、人y--整个构件分别对虚轴ɪ-ɪ或y-y 的长细比; λ?—单肢对最小刚度轴的长细比,其 计算长度取缀板间的净距离 | |
|
缀条 |
^=7λ5+4o⅛ A=JM+4。击 |
AHj—构件横截面所截垂直于ɪ-ʃ轴的 平面内各斜缀条的毛截面面积 之和; ARl——构件横截面所截垂直于轴的 平面内各斜綴条的毛截面面积 之和 | |
|
Iy ɪ |
綴条 |
λ - K I 42Ar 七寸+Ags% λ = k I 42Ar 一 "lλ∕八十A幻(1.5-CoSW) |
人八七一整个构件分别对虚轴ɪ-ɪ或 W 的长细比3 AR —构件横截面所截各弦杆(主肢)的 毛截面面积之和; ARl ―-构件横截面所截各斜綴条的毛載 面面积之和$ 俨 一-缀条所在平面与丁轴的夹角 |
.綴板组合构件的单肢长细比"不应大于40。缀板尺寸应符合下列规定:綴板沿肢件轴线方向的宽度不应小 于肢件轴线间距离的2/3,厚度不应小于该距离的1/40,且不小于6 mmO
h斜缀条轴线与组合构件的轴线间的夹角应保持在40°〜70。范围之内。
附录H
(规范性附录)
轴心受压构件的稳定系数
a类、b类、C类、d类截面(见表35)轴心受压构件的稳定系数甲的选择见表H.1〜表H.4o
表H.1〜表H.4中的用值由式(H.1)算出。
当 λn =^√^7E ≤ 0.215 时成=l-α1λj
π
> ∙∙∙( H.1 )
当摭 > 0.215 时:甲=[(。2 +。3 义” + ʌn ) — J(s +。3 九 + 人— 4脂]
式中:
九 一正则长细比;
λ —构件长细比,见5∙4∙1∙4;
—系数,根据表35的截面分类,由表H.5査取;
E ——钢材的弹性模量,E = 2.06×105N∕mm2,同式(53);
σ, ——构件材料的屈服点,单位为牛顿每平方毫米(N∕mm2)o
注:当构件假想长细比λp=λ√^7235的值超出表H.1〜表H.4的范围时,中值按式(H.1)计算。
表H.1 a类截面轴心受压构件的稳定系数φ
|
λ7⅛ |
O |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
O |
1.000 |
1.000 |
1.000 |
1.000 |
0.999 |
0.999 |
0.998 |
0.998 |
0.997 |
0.996 |
|
10 |
0.995 |
0.994 |
0.993 |
0.992 |
0.991 |
0.989 |
0.988 |
0.986 |
0.985 |
0.983 |
|
20 |
0.981 |
0.979 |
0.977 |
0.976 |
0.974 |
0.972 |
0.970 |
0.968 |
0.966 |
0.964 |
|
30 |
0.963 |
0.961 |
0.959 |
0.957 |
0.955 |
0.952 |
0.950 |
0.948 |
0.946 |
0.944 |
|
40 |
0.941 |
0.939 |
0.937 |
0.934 |
0.932 |
0.929 |
0.927 |
0.924 |
0.921 |
0.919 |
|
50 |
0.916 |
0.913 |
0.910 |
0.907 |
0.904 |
0.900 |
0.897 |
0.894 |
0.890 |
0.886 |
|
60 |
0.883 |
0.879 |
0.875 |
0.871 |
0.867 |
0.863 |
0.858 |
0.854 |
0.849 |
0.844 |
|
70 |
0.839 |
0.834 |
0.829 |
0.824 |
0.818 |
0.813 |
0.807 |
0.801 |
0.795 |
0.789 |
|
80 |
0∙783 |
0.776 |
0.770 |
0.763 |
0.757 |
0.750 |
0.743 |
0.736 |
0.728 |
0.721 |
|
90 |
0.714 |
0.706 |
0.699 |
0.691 |
0.684 |
0.676 |
0.668 |
0.661 |
0.653 |
0.645 |
|
IOO |
0.638 |
0.630 |
0.622 |
0.615 |
0.607 |
0.600 |
0.592 |
0.585 |
0.577 |
0.570 |
|
IlO |
0.563 |
0.555 |
0.548 |
0.541 |
0.534 |
0.527 |
0.520 |
0.514 |
0.507 |
0.500 |
|
120 |
0.494 |
0.488 |
0.481 |
0.475 |
0.469 |
0.463 |
0.457 |
0.451 |
0.445 |
0.440 |
|
130 |
0.434 |
0.429 |
0.423 |
0.418 |
0.412 |
0.407 |
0.402 |
0.397 |
0.392 |
0.387 |
|
140 |
0.383 |
0.378 |
0.373 |
0.369 |
0.364 |
0.360 |
0.356 |
0.351 |
0.347 |
0.343 |
|
150 |
0.339 |
0.335 |
0.331 |
0.327 |
0.323 |
0.320 |
0.316 |
0.312 |
0.309 |
0.305 |
|
160 |
0.302 |
0.298 |
0.295 |
0.292 |
0.289 |
0.285 |
0.282 |
0.279 |
0.276 |
0.273 |
表H.1 (续)
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
170 |
0.270 |
0.267 |
0.264 |
0.262 |
0.259 |
0.256 |
0.253 |
0.251 |
0.248 |
0.246 |
|
180 |
0.243 |
0.241 |
0.238 |
0.236 |
0.233 |
0.231 |
0.229 |
0.226 |
0.224 |
0.222 |
|
190 |
0.220 |
0.218 |
0.215 |
0.213 |
0.211 |
0.209 |
0.207 |
0.205 |
0.203 |
0.201 |
|
200 |
0.199 |
0.198 |
0.196 |
0.194 |
0.192 |
0.190 |
0.189 |
0.187 |
0.185 |
0.183 |
|
210 |
0.182 |
0.180 |
0.179 |
0.177 |
0.175 |
0.174 |
0.172 |
0.171 |
0.169 |
0.168 |
|
220 |
0.166 |
0.165 |
0.164 |
0.162 |
0.161 |
0.159 |
0.158 |
0.157 |
0.155 |
0.154 |
|
230 |
0.153 |
0.152 |
0.150 |
0.149 |
0.148 |
0.147 |
0.146 |
0.144 |
0.143 |
0.142 |
|
240 |
0.141 |
0.140 |
0.139 |
0.138 |
0.136 |
0.135 |
0.134 |
0.133 |
0.132 |
0.131 |
|
250 |
0.130 |
— |
— |
— |
— |
-— |
— |
— |
—— |
表H∙2 b类截面轴心受压构件的稳定系数枢
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
0 |
1.000 |
1.000 |
1.000 |
0.999 |
0.999 |
0.998 |
0.997 |
0.996 |
0.995 |
0.994 |
|
10 |
0.992 |
0.991 |
0.989 |
0.987 |
0.985 |
0.983 |
0.981 |
0.978 |
0.976 |
0.973 |
|
20 |
0.970 |
0.967 |
0.963 |
0.960 |
0.957 |
0.953 |
0.950 |
0.946 |
0.943 |
0.939 |
|
30 |
0.936 |
0.932 |
0.929 |
0.925 |
0.922 |
0.918 |
0.914 |
0.910 |
0.906 |
0.903 |
|
40 |
0.899 |
0.895 |
0.891 |
0.887 |
0.882 |
0.878 |
0.874 |
0.870 |
0.865 |
0.861 |
|
50 |
0.856 |
0.852 |
0.847 |
0.842 |
0.838 |
0.833 |
0.828 |
0.823 |
0.818 |
0.813 |
|
60 |
0.807 |
0.802 |
0.797 |
0.791 |
0.786 |
0.780 |
0.774 |
0.769 |
0.763 |
0.757 |
|
70 |
0.751 |
0.745 |
0.739 |
0.732 |
0.726 |
0.720 |
0.714 |
0.707 |
0.701 |
O∙694 |
|
80 |
0.688 |
0.681 |
0.675 |
0.668 |
0.661 |
0.655 |
0.648 |
0.641 |
0.635 |
0.628 |
|
90 |
0.621 |
0.614 |
0.608 |
0.601 |
0.594 |
0.588 |
0.581 |
0.575 |
0.568 |
0.561 |
|
100 |
0.555 |
0.549 |
0.542 |
0.536 |
0.529 |
0.523 |
0.517 |
0.511 |
0.505 |
0.499 |
|
110 |
0.493 |
0.487 |
0.481 |
0.475 |
0.470 |
0.464 |
0.458 |
0.453 |
0.447 |
0.442 |
|
120 |
0.437 |
0.432 |
0.426 |
0.421 |
0.416 |
0.411 |
0.406 |
0.402 |
0.397 |
0.392 |
|
130 |
0.387 |
0.383 |
0.378 |
0.374 |
0.370 |
0.365 |
0.361 |
0.357 |
0.353 |
0.349 |
|
140 |
0.345 |
0.341 |
0.337 |
0.333 |
0.329 |
0.326 |
0.322 |
0.318 |
0.315 |
0.311 |
|
150 |
0.308 |
0.304 |
0.301 |
0.298 |
0.295 |
0.291 |
0.288 |
0.285 |
0.282 |
0.279 |
|
160 |
0.276 |
0.273 |
0.270 |
0.267 |
0.265 |
0.262 |
0.259 |
0.256 |
0.254 |
0.251 |
|
170 |
0.249 |
0.246 |
0.244 |
0.241 |
0.239 |
0.236 |
0.234 |
0.232 |
0.229 |
0.227 |
|
180 |
0.225 |
0.223 |
0.220 |
0.218 |
0.216 |
0.214 |
0.212 |
0.210 |
0.208 |
0.206 |
|
190 |
0.204 |
0.202 |
0.200 |
0.198 |
0.197 |
0.195 |
0.193 |
0.191 |
0.190 |
0.188 |
|
200 |
0.186 |
0.184 |
0.183 |
0.181 |
0.180 |
0.178 |
0.176 |
0.175 |
0.173 |
0.172 |
表H∙2 (续)
|
λ届 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
210 |
0.170 |
0.169 |
0.167 |
0.166 |
0.165 |
0.163 |
0.162 |
0.160 |
0.159 |
0.158 |
|
220 |
0.156 |
0.155 |
0.154 |
0.153 |
0.151 |
0.150 |
0.149 |
0.148 |
0.146 |
0.145 |
|
230 |
0.144 |
0.143 |
0.142 |
0.141 |
0.140 |
0∙138 |
0.137 |
0.136 |
0.135 |
0.134 |
|
240 |
0.133 |
0.132 |
0.131 |
0.130 |
0.129 |
0.128 |
0.127 |
0.126 |
0.125 |
0.124 |
|
250 |
0.123 |
— |
表H∙3 C类截面轴心受压构件的稳定系数0
|
O |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
O |
1.000 |
1.000 |
1.000 |
0.999 |
0.999 |
0.998 |
0.997 |
0.996 |
0.995 |
0.993 |
|
10 |
0.992 |
0.990 |
0.988 |
0.986 |
0.983 |
0.981 |
0.978 |
0.976 |
0.973 |
0.970 |
|
20 |
0.966 |
0.959 |
0∙953 |
0.947 |
0∙940 |
0.934 |
0.928 |
0.921 |
0.915 |
0.909 |
|
30 |
0.902 |
0.896 |
0.890 |
0.884 |
0.877 |
0.871 |
0.865 |
0.858 |
0.852 |
0.846 |
|
40 |
0.839 |
0.833 |
0.826 |
0.820 |
0.814 |
0.807 |
0.801 |
0.794 |
0.788 |
0.781 |
|
50 |
0.775 |
0.768 |
0.762 |
0.755 |
0.748 |
0.742 |
0.735 |
0.729 |
0.722 |
0.715 |
|
60 |
0.709 |
0.702 |
0.695 |
0.689 |
0.682 |
0.676 |
0.669 |
0.662 |
0.656 |
0.649 |
|
70 |
0.643 |
0.636 |
0.629 |
0.623 |
0.616 |
0.610 |
0.604 |
0.597 |
0.591 |
0.584 |
|
80 |
0.578 |
0.572 |
0.566 |
0.559 |
0.553 |
0.547 |
0.541 |
0.535 |
0∙529 |
0.523 |
|
90 |
0.517 |
0.511 |
0.505 |
0.500 |
0.494 |
0.488 |
0.483 |
0.477 |
0.472 |
0.467 |
|
IOO |
0.463 |
0.458 |
0.454 |
0.449 |
0.445 |
0.441 |
0.436 |
0.432 |
0.428 |
0.423 |
|
IlO |
0.419 |
0.415 |
0.411 |
0.407 |
0.403 |
0.399 |
0.395 |
0.391 |
0.387 |
0.383 |
|
120 |
0.379 |
0.375 |
0.371 |
0.367 |
0.364 |
0.360 |
0.356 |
0.353 |
0.349 |
0.346 |
|
130 |
0.342 |
0.339 |
0.335 |
0.332 |
0.328 |
0.325 |
0.322 |
0.319 |
0.315 |
0.312 |
|
140 |
0.309 |
0.306 |
0.303 |
0.300 |
0.297 |
0.294 |
0.291 |
0.288 |
0.285 |
0.282 |
|
150 |
0.280 |
0.277 |
0.274 |
0.271 |
0.269 |
0.266 |
0.264 |
0.261 |
0.258 |
0.256 |
|
160 |
0∙254 |
0.251 |
0.249 |
0.246 |
0.244 |
0.242 |
0.239 |
0.237 |
0.235 |
0.233 |
|
170 |
0.230 |
0.228 |
0.226 |
0.224 |
0.222 |
0.220 |
0.218 |
0.216 |
0.214 |
0.212 |
|
180 |
0.210 |
0.208 |
0.206 |
0.205 |
0.203 |
0.201 |
0.199 |
0.197 |
0.196 |
0.194 |
|
190 |
0.192 |
0.190 |
0.189 |
0.187 |
0.186 |
0.184 |
0.182 |
0.181 |
0J79 |
0.178 |
|
200 |
0.176 |
0.175 |
0.173 |
0.172 |
0.170 |
0.169 |
0.168 |
0.166 |
0.165 |
0.163 |
|
210 |
0.162 |
0.161 |
0.159 |
0.158 |
0.157 |
0.156 |
0.154 |
0.153 |
0.152 |
0.151 |
|
220 |
0.150 |
0.148 |
0.147 |
0.146 |
0.145 |
0.144 |
0.143 |
0.142 |
0.140 |
0.139 |
|
230 |
0.138 |
0.137 |
0.136 |
0.135 |
0.134 |
0.133 |
0.132 |
0.131 |
0.130 |
0.129 |
|
240 |
0.128 |
0.127 |
0.126 |
0.125 |
0.124 |
0.124 |
0.123 |
0.122 |
0.121 |
0.120 |
|
250 |
0.119 |
■— |
— |
— |
— |
— |
— |
— |
— |
表H.4 d类截面轴心受压构件的稳定系数少
|
λ7⅛ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
O |
1.000 |
LOOO |
0.999 |
0.999 |
0.998 |
0.996 |
0.994 |
0.992 |
0.990 |
0.987 |
|
IO |
0.984 |
0.981 |
0.978 |
0.974 |
0.969 |
0.965 |
0.960 |
0.955 |
0.949 |
0.944 |
|
20 |
0.937 |
0.927 |
0.918 |
0.909 |
0.900 |
0.891 |
0.883 |
0.874 |
0.865 |
0.857 |
|
30 |
0.848 |
0.840 |
0.831 |
0.823 |
0.815 |
0.807 |
0.799 |
0.790 |
0.782 |
0.774 |
|
40 |
0.766 |
0.759 |
0.751 |
0.743 |
0.735 |
0.728 |
0.720 |
0.712 |
0.705 |
0.697 |
|
50 |
0.690 |
0.683 |
0.675 |
0.668 |
0.661 |
0.654 |
0.646 |
0.639 |
0.632 |
0.625 |
|
60 |
0.618 |
0.612 |
0.605 |
0.598 |
0.591 |
0.585 |
0.578 |
0.572 |
0.565 |
0.559 |
|
70 |
0.552 |
0.546 |
0.540 |
0.534 |
0.528 |
0.522 |
0.516 |
0.510 |
0.504 |
0.498 |
|
80 |
0.493 |
0.487 |
0.481 |
0.476 |
0.470 |
0.465 |
0.460 |
0.454 |
0.449 |
0.444 |
|
90 |
0.439 |
0.434 |
0.429 |
0.424 |
0.419 |
0.414 |
0.410 |
0.405 |
0.401 |
0.397 |
|
100 |
0.394 |
0.390 |
0.387 |
0.383 |
0.380 |
0.376 |
0.373 |
0.370 |
0.366 |
0.363 |
|
110 |
0.359 |
0.356 |
0.353 |
0.350 |
0.346 |
0.343 |
0.340 |
0.337 |
0.334 |
0.331 |
|
120 |
0.328 |
0.325 |
0∙322 |
0.319 |
0.316 |
0.313 |
0.310 |
0.307 |
0.304 |
0.301 |
|
130 |
0.299 |
0.296 |
0.293 |
0.290 |
0.288 |
0.285 |
0.282 |
0.280 |
0.277 |
0.275 |
|
140 |
0.272 |
0.270 |
0.267 |
0.265 |
0.262 |
0.260 |
0.258 |
0.255 |
0.253 |
0.251 |
|
150 |
0.248 |
0.246 |
0.244 |
0.242 |
0.240 |
0.237 |
0.235 |
0.233 |
0.231 |
0.229 |
|
160 |
0.227 |
0.225 |
0.223 |
0.221 |
0.219 |
0.217 |
0.215 |
0.213 |
0.212 |
0.210 |
|
170 |
0.208 |
0.206 |
0.204 |
0.203 |
0.201 |
0.199 |
0.197 |
0.196 |
0.194 |
0.192 |
|
180 |
0.191 |
0.189 |
0.188 |
0.186 |
0.184 |
0.183 |
0.181 |
0.180 |
0.178 |
0.177 |
|
190 |
0.176 |
0.174 |
0J73 |
0.171 |
0.170 |
0.168 |
0.167 |
0.166 |
0.164 |
0.163 |
|
200 |
0.162 |
— |
|
截面类别 |
Ol |
% | ||
|
a类 |
0.41 |
0.986 |
0.152 | |
|
b类 |
0.65 |
0.965 |
0.300 | |
|
C类 |
λw≤1.05 |
0.73 |
0.906 |
0.595 |
|
λβ>1.05 |
1.216 |
0.302 | ||
|
d类 |
λw≤1.05 |
1.35 |
0.868 |
0.915 |
|
λ.>1.05 |
1.375 |
0.432 | ||
附录I
(规范性附录)
受弯梁构件侧向屈曲稳定系数(整体稳定系数)饥
Ll承受端弯矩和横向载荷时的等截面焊接工字形组合截面和轧制H型钢构件简支梁的侧向屈曲稳
定系数物按式(Ll)计算:
4 320 ɪ
Ah
×uΓ×
235
X —
...............(1.1 )
式中:
物一侧向屈曲稳定系数(整体稳定系数);
队——简支梁受横向载荷的等效临界弯矩系数,见表L1;
λ, ——受弯构件(梁)截面对弱轴3轴)的长细比,由式(47)算得;
A ——构件毛截面面积,单位为平方毫米(mm2);
h —构件截面的全高,单位为毫米(mm);
J —构件受压翼缘厚度,单位为毫米(mm);
Wl——按受压最大纤维确定的截面对强轴(%轴)的抗弯模量,单位为三次方毫米(mm3);
k —截面对称系数,对双轴对称截面取为1,对单轴对称截面取为0.8;
m -一受压翼缘对弱轴3轴)的惯性矩与全截面对弱轴3轴)的惯性矩之比,双轴对称为0.5;
久一构件材料的屈服点,单位为牛顿每平方毫米(N∕mm2);当材料的屈服点孔与抗拉强度门, 的比值大于0.7时,式中久用0.5σt+0.35σA代替。
表1.1 H型钢和等截面工字形简支梁的整体稳定等效临界弯矩系数φb
|
项次 |
侧向支承 |
载荷 |
^≤2.0 |
S>2.0 |
适用范围 | |
|
1 |
跨中无侧向支承 |
均布载荷 作用在 |
上翼缘 |
0.69 + 0.13S |
0.95 |
双轴对称焊接工字形截面、加强 受压翼缘的单轴对称焊接工字 形截面、轧制H型钢截面 |
|
2 |
下翼缘 |
1.73 — 0.20£ |
1.33 | |||
|
3 |
集中载荷 作用在 |
上翼缘 |
0.73 + 0.18$ |
1.09 | ||
|
4 |
下翼缘 |
2.23-0.28$ |
1.67 | |||
|
5 |
跨度中点有一个 侧向支承点 |
均布载荷 作用在 |
上翼缘 |
1.15 |
双轴对称焊接工字形截面、加强 受压翼缘的单轴对称焊接工字 形截面、加强受拉翼缘的单轴对 称焊接工字形截面、轧制H型钢 截面 | |
|
6 |
下其缘 |
1.40 | ||||
|
7 |
集中载荷作用在截面 高度上任意位置 |
1.75 | ||||
|
8 |
跨中有不少于两个 等距离侧向支承点 |
任意载荷 作用在 |
上翼缘 |
1.20 | ||
|
9 |
下翼缘 |
1.40 | ||||
|
IO |
梁端有弯矩,但跨中无载荷作用 |
1.75一 1.05 (曾)+0.3 (普), 但 ≤2.3 | ||||
|
注13=吾,其中L为跨度或受压翼缘的计算(自由)长度,们和1为受压翼缘的宽度和厚度。 注2: M1 .M2为梁的端弯矩,使梁产生同向曲率时和ʌʤ取同号.产生反向曲率时取异号JM,∣≥∣M2L 注3:表中项次3、4和7的集中载荷是指一个或少数几个集中载荷位于跨中附近的情况,对其他情况的集中载 荷,按表中项次1、2、5、6内的数值采用。 注4:表中项次8、9的凡,当集中载荷作用在侧向支承点处时,取Λ = 1.20β 注5:载荷作用在上翼缘系指作用点在上翼缘表面,方向指向截面形心;载荷作用在下翼缘,系指作用在下翼缘 表面,方向背向截面形心。 注和I2分别为工字形截面受压翼缘和受拉翼缘对V轴的惯性矩,对w = r⅛->0.8的加强受压翼缘工 ɪ I ɪ ɪ 2 字形截面,下列项次算岀的④值需乘以相应的系数: 项次1:当e ≤1.0时,乘以0.95; 项次3:当e ≤0.5时,乘以0.90;当0.5<e ≤1.0时,乘以0.95。 | ||||||
1.2两端简支的轧制普通工字钢受弯构件,其物值按表1.2査取。
表L2两端简支的轧制普通工字钢梁构件的饥值
|
载荷情况 |
工字钢型号 |
自由长度/ m | ||||||||||
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 | ||||
|
跨中无侧向 支承点 的构件 |
集中载荷 作用于 |
上翼缘 |
10 〜20 |
2.00 |
1.30 |
0.99 |
0.80 |
0.68 |
0.58 |
0.53 |
0.48 |
0.43 |
|
22 〜32 |
2.40 |
1.48 |
1.09 |
0.86 |
0.72 |
0.62 |
0.54 |
0.49 |
0.45 | |||
|
36 〜63 |
2.80 |
L60 |
1.07 |
0.83 |
0.68 |
0.56 |
0.50 |
0.45 |
0.40 | |||
|
下翼缘 |
10 〜20 |
3.10 |
1.95 |
1.34 |
1.01 |
0.82 |
0.69 |
0.63 |
0.57 |
0.52 | ||
|
22 〜40 |
5.50 |
2.80 |
1.84 |
1.37 |
1.07 |
0.86 |
0.73 |
0.64 |
0.56 | |||
|
45 〜63 |
7.30 |
3.60 |
2.30 |
1.62 |
1.20 |
0.96 |
0.80 |
0.69 |
0.60 | |||
|
均布载荷 作用于 |
上翼缘 |
10 〜20 |
1.70 |
1.12 |
0.84 |
0.68 |
0.57 |
0.50 |
0.45 |
0.41 |
0.37 | |
|
22 〜40 |
2.10 |
1.30 |
0.93 |
0.73 |
0.60 |
0.51 |
0.45 |
0.40 |
0.36 | |||
|
45 〜63 |
2.60 |
1.45 |
0.97 |
0.73 |
0.59 |
0.50 |
0.44 |
0.38 |
0.35 | |||
|
F翼缘 |
10 〜20 |
2.50 |
1.55 |
1.08 |
0.83 |
0.68 |
0.56 |
0.52 |
0.47 |
0.42 | ||
|
22 〜40 |
4.00 |
2.20 |
1.45 |
1.10 |
0.85 |
0.70 |
0.60 |
0.52 |
0.46 | |||
|
45 〜63 |
5.60 |
2.80 |
1.80 |
1.25 |
0.95 |
0.78 |
0.65 |
0.55 |
0.49 | |||
|
跨中有侧向支承点的构件 (不论载荷作用点在 截面高度上的位置) |
10 〜20 |
2.20 |
1.39 |
1.01 |
0.79 |
0.66 |
0.57 |
0.52 |
0.47 |
0.42 | ||
|
22 〜40 |
3.00 |
1.80 |
1.24 |
0.96 |
0.76 |
0.65 |
0.56 |
0.49 |
0.43 | |||
|
45 〜63 |
4.00 |
2.20 |
1.38 |
1.01 |
0.80 |
0.66 |
0.56 |
0.49 |
0.43 | |||
|
注1:集中载荷指一个或少数几个集中载荷位于跨中附近的情况,对其他情况的载荷均按均布载荷考虑。 注2:载荷作用在上翼缘系指作用点在翼缘表面,方向指向截面形心;载荷作用在下翼缘也系指作用在翼缘表 面,方向背向截面形心。 注3:物适用于Q235号钢,当用其他钢号时,査得的φh需乘以235/”。 注4: φh不小于2.5时不需再验算其侧向屈曲稳定性;表中大于2.5的例值,为其他钢号换算査用。 | ||||||||||||
L3当算出或査出的物值大于0.8时,应用按式(1.2)计算的或用从表1.3中査取的修正值说代替物。
, 晚
(1.2 )
°” =晚+0.16
式中:
夙一稳定系数修正值;
ψh---同式(ɪ-ɪ)o
表1.3稳定系数修正值妍
|
(Pb |
0.80 |
0.85 |
0.90 |
0.95 |
1.00 |
1.05 |
1.10 |
1.15 |
1.20 |
1.25 |
1.30 |
|
0.800 |
0.818 |
0.835 |
0.850 |
0.862 |
0.874 |
0.883 |
0.892 |
0.901 |
0.908 |
0.913 | |
|
Vb |
1.35 |
1.40 |
1.45 |
1.50 |
1.55 |
1.60 |
1.80 |
2.00 |
2.20 |
2.40 |
22.50 |
|
(Pb |
0.919 |
0.925 |
0.930 |
0.934 |
0.938 |
0.941 |
0.953 |
0.961 |
0.968 |
0.973 |
LOOO |
14简支的轧制槽钢梁构件,不论载荷的形式和作用的位置,其物值按式(1.3)计算,大于1者取Ie
57Qbtb VZ 235
φb =—— X — ........................( 1.3)
Lh (Jt
式中:
φh——简支的轧制槽钢梁构件的侧向屈曲稳定系数;
b —受压翼缘的宽度,单位为毫米(mm);
h ——槽钢构件截面的全高,单位为毫米(mm);
L ——构件受压翼缘的平均厚度,单位为毫米(mm);
I ——受压翼缘的计算(自由)长度,单位为毫米(mm);
σ,——构件材料的屈服点,单位为牛顿每平方臺米(N∕mm2);当材料的屈服点J与抗拉强度3,的 比值大于0.7时,式中久用0.5ι+ 0.35σA代替。
附录J
(资料性附录) 压弯构件整体稳定性验算
本方法适用于在两个相互垂宜的平面内约束条件相同、在弹性工作阶段的等截面构件。
J.1双向压弯构件的整体稳定性验算
J.1.1受有轴向压力以及绕强轴α轴)的弯矩和绕弱轴3轴)的弯矩的构件,应按式(J.1)验算其弯曲 屈曲的整体稳定性,按式(J.2)验算其侧向弯扭屈曲的整体稳定性。可取多个危险截面分别进行验算。
ICarMoi + CHyMHy .. XlIK
≤ IImσ ・••( J.1 )
1 A-N/NEy -CarMOr + CHJM Ll-N∕Nχ
φtlWr
—≤ Iirnσ
(J.2 )
式中:
N
A
(PΨ
(P
ψ
N&、N
Wr、Wy
——构件的轴向压力,单位为牛顿(N);
——构件毛截面面积,单位为平方毫米(mm2);
——同式(54)轴心受压稳定系数φ和其修正系数。的乘积,有仁叼和R0〉.之分,取其 中的小值;
——同式(52)的轴心受压稳定系数,有对Z轴的孔和对y轴的代之分;
―轴心受压稳定系数的修正系数,有对工轴的们和对了轴的久之分,按式(55)计算;
——同式(52);
——构件计算截面对强轴(工轴)和对弱轴3轴)的抗弯模量,单位为三次方毫米 (mm3);
—构件的端部弯矩,单位为牛顿毫米(N・mm);
MQX My
MHJHy — 由横向载荷在构件中引起的最大弯矩,单位为牛顿毫米(N・mm);当MH与MO方 向相反,且ICHMHI <2C0M。时,取MH为零;若抗弯模量W上下(或左右)不同, 有W大、W小之分,且MH在W小侧产生压力,则当ICHMHIX (W大/W小)V2 CO MO 时,取MH为零;
—端部弯矩不等的折减系数,按式(J.3)计算的计算值均应不小于0.4,否则 取其为0.4;
——横向载荷弯矩系数,可按式(J∙4)计算。系数CH的精确计算见J∙5;
——受弯构件侧向弯扭屈曲稳定性系数,按附录I选取。
C Hr、C HV
物
符合5.4.2.2.1规定的构件,不必验算其侧向弯扭屈曲的整体稳定性。
Cihr =0.6 + 0.4(M'°]/MM)
CQy =O.β÷O.4(M,o√Mop
(J.3 )
式中:
AoM。八 /M”
结构件两端的端部弯矩比值,其绝对值不大于1;两个端弯矩使构件轴线 产生同向挠曲时,其比值为正(+),反向挠曲时,其比值为负(一)。
CH =ITN/Ne ........................( J.4 )
式中:
b --系数,按表J.1取值;
NE——分为与CHX XHy相对应的Ne-Ne,,见式(53)o
表J.1未提供的其他情况,取CH = IO
表J.1系数士的取值
|
序号 |
载荷和支承情况 |
k |
|
1 |
当横向载荷为集中力,且两端简支或一端固接一端自由时 |
0.2 |
|
2 |
当为多个集中载荷或分布载荷,且两端简支时 |
0 |
|
3 |
当为多个集中载荷或分布载荷,一端固接一端自由时 |
0.3 |
|
4 |
无论何种载荷,一端固接一端简支时 |
0.3 |
|
5 |
无论何种载荷,两端固接时 |
0.4 |
若式(J.1)中第2项和第3项之和(即弯矩所引起的应力)与第1项(即轴力引起的应力)之比小于 或等于(≠-D时,也就是式(J.5)成立时,则双向压弯构件应按轴压公式(46)验算其整体稳定性。
|
■ |
1 「 |
COerMox + C HXM Hr |
「 1 ~ |
C(XrMOr +C HyM Hy |
|
ʃɪ |
一 一 W, + |
.1-N∕NeJ |
Wy |
N Aφψ
≤≠-l ……(J.5
式中符号同式(J∙l)和式(J∙2)°
J.1.2对空间格构式构件还应将其受压弦杆及受压腹杆视为轴心压杆,以验算其单肢稳定性。
12单向压弯构件的整体稳定性验算
J.2.1单向压弯构件,弯矩绕强轴α轴)作用时,其整体稳定性按式(J.2)验算。
J.2.2单向压弯构件,弯矩绕弱轴3轴)作用时,其整体稳定性按式(J.6)验算。
当式(J.7)成立时,则应按轴压公式(46)验算其整体稳定性。
COyMoy +C HyM
Ll-N/NE
—≤ Iirnσ
(J.6 )
WY
|
Γ 1 ■ |
COyMoy 4- CHyMHy |
|
.1-N∕Ne 八 | |
|
N | |
|
Aφψ |
≤≠-l
(J.7 )
式中符号同式(J∙l)和式(j.2)o
J.3对两端在两个相互垂直平面内支承方式不同的等截面或变截面构件整体稳定性验算
对两端在两个相互垂直平面内支承方式不同的等截面或变截面构件整体稳定性计算仍可用式 (J.1)和式(J.2),但应取两个以上危险截面进行验算。
J.4计算压弯构件整体稳定性时对制造误差的考虑
当计算压弯构件时,可将构件的制造误差引起的初始变形人或使用后由于磨损产生的间隙引起的 位移兀所形成的附加弯矩Nfo或NI加到式(J.1)的y±-o此时式中的第一项中的 神取
为Io
J.5横向载荷弯矩系数CH的计算公式
横向载荷弯矩系数CH是一个等效换算系数,用其将由于横向载荷引起的最大弯矩换算成式 (J.8)中的等效杆端弯矩1。,即Mn = CHMHO因此,计算时可以不考虑材料的抗力系数。在有轴向 压力的情况下,任何横向载荷引起的弯矩以及变形引起的附加弯矩之和应与端弯矩引起的最终弯矩 相等,即:
(1-N∕n"o =M- 」 (1 一 N∕Nf)n-h ........................( J・8 >
式中: N ——构件的轴向压力,单位为牛顿(N),同式(J.1); NE——同式(52);
MO ―构件的端部弯矩,单位为牛顿毫米(N ∙ mm);
MH —横向载荷在构件中引起的弯矩,单位为牛顿毫米(N・mm);
△ h——横向载荷引起的变形,单位为毫米(mm)。
将CHMH=MO带人式(J.8),即可写出CH的表达式(J.9)o
…f洗
= MKHa
式中:
KH——系数,随△ H、MH和NE而变,见式(J.10);
式中其他符号同式(J.8)β
K宀—护=M辭X弟
MH MH (μl)
(J.9 )
(J.10 )
式中符号同式(J.8)、式(J.9)。
在计算KH时,构件已转化为一根等截面的假想构件,其计算长度le=μl也已经由长度系数"頒
="/2)转换(见附录G,附录G中未提供的其他情况可按能量法自行推导)。如果在计算时使用当 量惯性矩则式(J.10)可改写成:
(J.11 )
对图J.1所示的一端自由一端固接的压弯构件,可得到:
qli 应 EL 2 π2
KH = I •。一点 XwX∕=F = °∙38
N N
代入式(J∙9),则CH = I-0.38云。但为方便计算.取CH = I— 0.4 κr,即为表J∙l中序号3。
N E Iyi E
图J.1 一端自由一端固接的压弯构件
表J.2横向载荷弯矩系数CH
序号

支承和受力情况
N
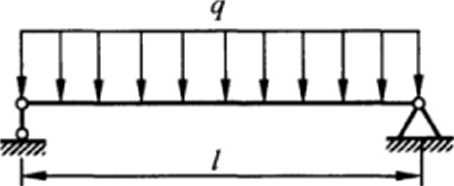
备注
MH =-I2
O
NE = WV
N

1^0∙3⅛
MH=yZ2
NE = δ⅛⅛⅛
, N
1-0∙4^
MH=岑 U
z /EL
NF =-:---
4 (卩」)
N
4
al
5
6
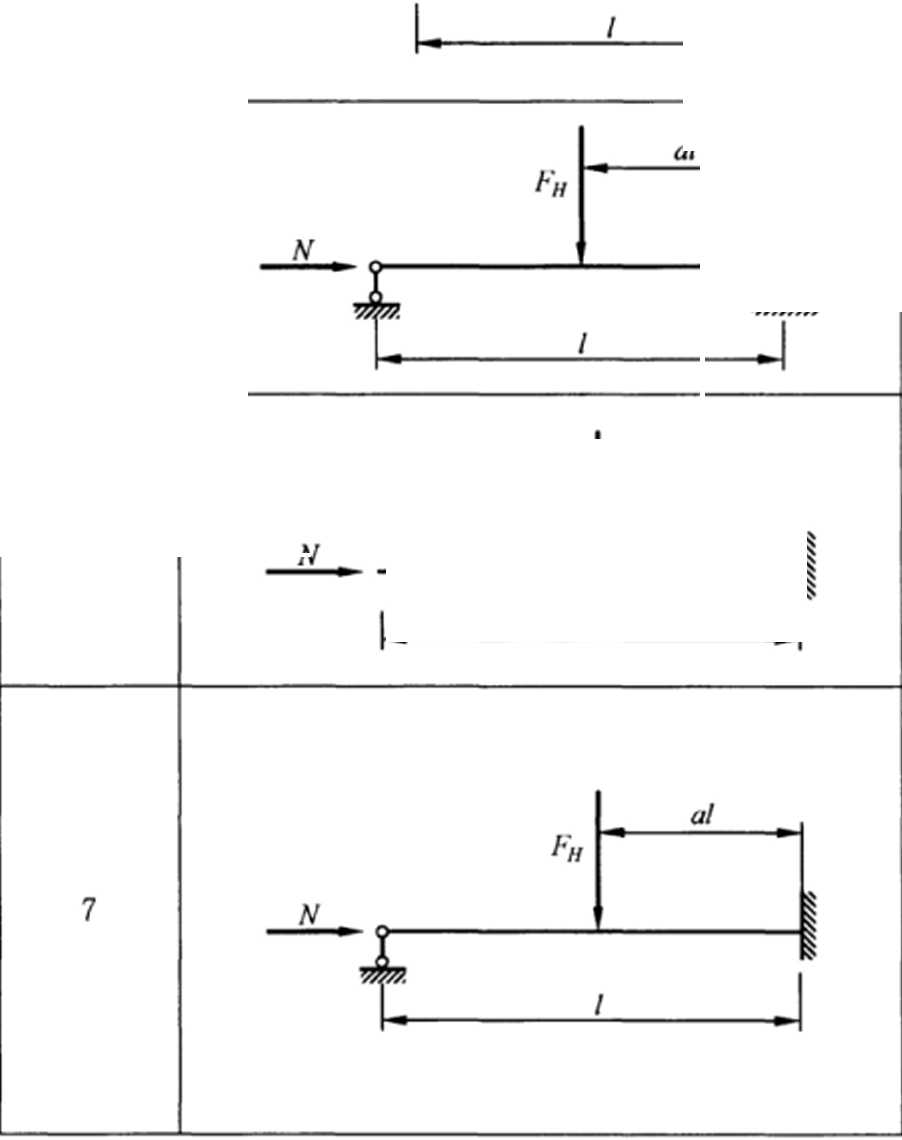
ʌ
C N 1-0.2 —
NE
Mf
NE=O⅛⅛7
MH =FHell (1 —a )
N "EL NE =布
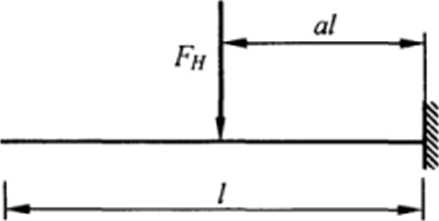
N
1 — [1 ~0.4(3α ~fl2 )]τπ"
N E
MH=FHal π2EZa NE = Γwv
, N
1—0.4 ʒʒ-NE
O乙
2 应EL
E-0.49 (.μ2l)2
表J∙2 (续)
|
序号 |
支承和受力情况 |
C H |
备注 | ||||
|
8 |
FH N _ ____________ |
一 出 … |
I |
1-0.6 ɪ NE |
MH=2FHla2 (.l-a)2 Kr π2E∕u | ||
|
^7777 L——, 」 |
N r = ■ ・■' E 0.25 (μ2l)2 | ||||||
|
9 |
6/1 |
FHZ |
_ |
1.0 |
MH 取 Mrn“ M π2E∕u | ||
|
七----/——W |
NE =祠 | ||||||
附录K
(规范性附录)
用于结构疲劳计算的构件连接应力集中情况等级和构件接头型式
K.1构件可以用螺栓或焊缝进行连接。
起重机常用的焊接型式有对接焊、双面坡口对接焊(K形焊)和角焊,焊接质址分为普通质量(O.Q) 和特殊质量(S.Q)两类,如表K.1所示。
在表K.1中还对某些型式的焊接接头给出了焊接检验的规定。
K.2表K.2给出了构件连接的应力集中情况等级和构件接头型式,其中所列各种不同的连接方法是 按其所产生的应力集中情况的大小来进行分类的。
对一条给定的焊缝来说,其应力集中情况随接头所受的载荷型式而变。
例如:对一个角焊缝接头进行纵向拉伸、压缩(0.31)或纵向剪切(0.51)时,应力集中情况等级划归 为K。类;进行横向拉伸或压缩(3.2或4.4)时,其应力集中情况等级则划归为L或K」类。
表K.1焊接质量
|
焊接型式 |
焊接质量 |
焊接方式 |
代号 |
焊接检验 |
代号 |
|
全深范围内 的对接焊 |
特殊质量 (S.Q) |
在封焊之前,焊根要刮光 (或修光);焊缝在平行于受 力方向与被连接板磨平.无 端头焊口 |
0 , X |
焊缝全长(100%)进 行检验(例如用X射 线) |
PIOO |
|
普通质量 (O.Q) |
在封焊之前,焊根要刮光 (或修光)3无端头焊口 |
X |
如果计算应力大于 0.8倍许用应力,焊 缝全长进行检验 |
PIOO | |
|
否则,至少抽检焊缝 长度的10⅜ |
PIO | ||||
|
在两连接件 所形成的角落 中进行的K形 焊。其中一个 连接件在焊缝 处开有坡口 |
特殊质量 (S.Q) |
在另一侧焊接前.焊根要刮 光(或修光);焊缝边缘无咬 边,必要时打磨;完全焊透 |
进行拉伸检验.垂直 于受力方向的钢板 在拉伸载荷下不发 生层状撕裂 |
D | |
|
普通质量 (O.Q) |
两条焊缝间未熔透的宽度 ≤3 mm mm |
ɪ | |||
|
在两连接件 所形成的角落 中进行的角焊 |
特殊质量 (S.Q) |
焊接的边缘无咬边,必要时 打磨 |
进行拉伸检验.垂直 于受力方向的钢板 在拉伸载荷下不发 生层状撕裂 |
D | |
|
普通质量 (O.Q) |
表K.2构件连接的应力集中情况等级和构件接头型式
|
1——非焊接件 _____应力集中情况等级Wo________________________ | |||||
|
构件接头型式的标号 |
说明 |
图 |
代号 | ||
|
Wo |
母材均匀.零件表面无接缝或不需连接 (实体杆),无切口应力集中效应,除非后 者可以计算 |
一口一 | |||
|
应力集中情况等级Wl | |||||
|
构件接头型式的标号 |
说明 |
图 |
代号 | ||
|
Wl |
钻孔零件■用于螺栓连接的钻孔零件,其 中的螺栓承载可高达许用值的20%;用于 高强度螺栓连接的钻孔零件,其中高强度 螺栓的最大承载可高达许用值的】00% |
I - I I I |
白心由& ©侦 TT-H T-tι | ||
|
应力集中情况等级W2 | |||||
|
构件接头型式的标号 |
说明 |
图 |
代号 | ||
|
W2., |
用于螺栓连接的钻孔零件,其中的螺栓承 受复剪 |
■ | |||
|
WM |
用于螺栓连接的钻孔零件,其中的螺栓承 受单剪(考虑偏心承载)。零件没有支承 |
■ | |||
|
W23 |
用螺栓装配的钻孔零件,其中的螺栓承受 单剪,零件作支承或导向用 |
-剧寸 | |||
|
2—焊接件 应力集中情况等级Ko—轻度应力集中 | |||||
|
构件接头型式的标号 |
说明 |
图 |
代号 | ||
|
0.1 |
焊缝垂直于力的方向,用对接焊缝(S.Q) 连接的零件 |
二 |
苛 PlOO X | ||
|
0.11 |
焊缝垂直于力的方向,用对接焊缝(S.Q) 连接不同厚度的零件。不对称斜度1/4 至1/5(或对称斜度1/3) |
1/4-1/5 ΞΞ2⅛=j. -史 |
PlOO X | ||
|
0.12 |
腹板横向接头对接焊(S.Q) |
ɪ PIoO X | |||
|
C∖ I I.亶—I | |||||
|
-・ ■ ・ ⅜ | |||||
应力集中情况等级K(I—轻度应力集中(续)
构件接头型式的标号
说明
代号
0.13
焊缝垂直于力的方向,用对接焊缝(SQ) 镶焊的角撑板
0.3
焊缝平行于力的方向,用对接焊缝(O.Q) 连接的零件

PIOO ⅛ PIO X
0.31
焊缝平行于力的方向,用角焊缝(O∙Q)连 接的零件(力沿连接零件的纵向作用)
0.32
梁的翼缘型钢和腹板之间的对接焊(O.Q)
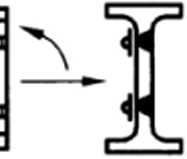
PlOO ⅛
PIO
X
0.33
梁的翼缘和腹板之间的K形焊或角焊(().
Q),梁按复合应力计算(见5.4.1.3)

0.5 纵向剪切情况下的对接焊(O.Q)

0.51
纵向剪切情况下的角焊(()・Q)或K形焊 (O.Q)
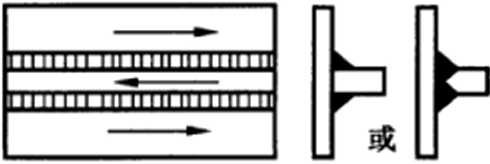
PIoo 或 PIO X
乂
应力集中情况等级KI—适度应力集中
构件接头型式的标号 说明 图
代号
1.11
焊缝垂直于力的方向,用对接焊缝(().Q) 连接的零件

PIOO 或 PIO
X
焊缝垂直于力的方向,用对接焊缝(O.Q) 连接不同厚度的零件。不对称斜度1/4 至1/5(或对称斜度1/3)
PIOO 或 PIO X
应力集中情况等级Kl—适度应力集中(续)
构件接头型式的标号
说明
代号
1.12 腹板横向接头对接焊(O.Q)

1.2
1.21
1.3
焊缝垂直于力的方向,用对接焊缝(O.Q) 连接的撑板
焊缝垂直于力的方向,连续K形焊缝(S.
Q)将零件连接到连续的主构件上
焊缝垂直于力的方向,用角焊缝(SQ)将 加强筋连接到腹板上,焊缝包过腹板加强 筋的各角
焊缝平行于力的方向,用对接焊缝连接的 零件(不检査焊缝)
1.31 弧形翼缘板和腹板之间的K形焊缝(SQ)
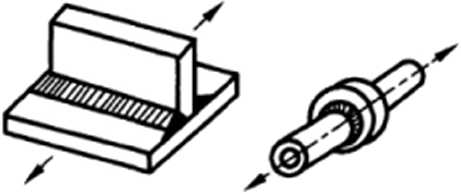
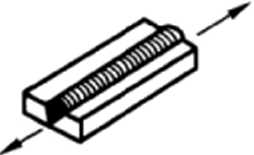
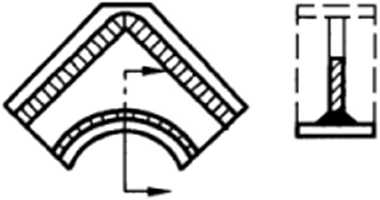

应力集中情况等级K2——中等应力集中
|
构件接头型式的标号 |
说明 |
图 |
代号 | ||||
|
2.1 |
焊缝垂直于力的方向,用对接焊缝(O.Q) 连接不同摩度的零件。不对称斜度1/3 (或对称斜度1/2) |
___/3 "⅛: ʌrr -÷- |
片一 PIOo 矗 X | ||||
|
2.11 |
焊缝垂直于力的方向,用对接焊缝(S.Q) 连接的型钢 |
ɪ PIOO X | |||||
|
2.12 |
焊缝垂直于力的方向,用对接焊缝(S.Q) 连接节点板与型钢 |
■ |
PlOO X | ||||
|
2.13 |
焊有辅助角撑板、各扁钢的交叉处.为焊 缱垂直于力的方向的对接焊(S.Q),焊缝 端部经打磨以防止出现应力集中 |
I 一 , |
Ir PlOO X | ||||
应力集中情况等级K2 — 中等应力集中(续)
构件接头型式的标号
说明
代号
2.2
焊缝垂直于力的方向,用角焊缝(SQ)将 横隔板、腹板加强筋、圆环或套筒连接到 主构件上

2.21
用角焊缝(SQ)将切角的横向加劲肋焊在 腹板上•焊缝不包角
2.22
用角焊缝(SQ)焊接的带切角的横隔板, 焊缝不包角

2.3
焊缝平行于力的方向,用对接焊缝(SQ) 将零件焊接到连续的主构件的边缘上,这 些零件的端部有斜度或圆角,焊缝端头经 打磨以防止出现应力集中
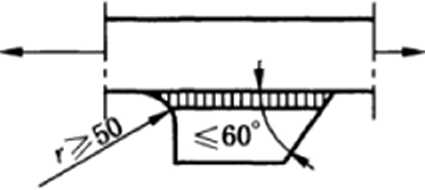
2.31
焊缝平行于力的方向,将零件焊接到连续 的主构件上,这些零件的端部有斜度或圆 角,在焊缝端头相当于10倍厚度的K度 上为K形焊(S.Q),焊缝端头经打磨以防 止出现应力集中
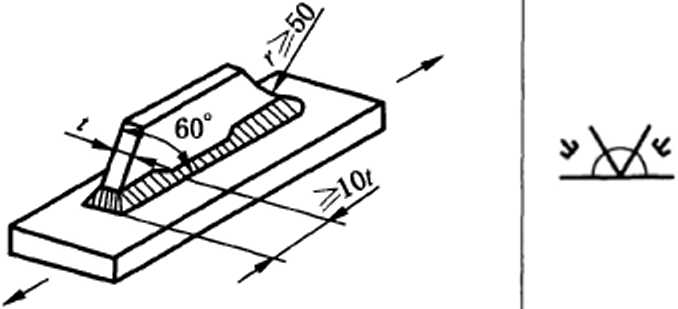
2.33
用角焊缝(SQ)将扁钢(坡口斜度1/3)连 接到连续的构件上,角焊在ʃ区域上进 行∙h t = 0.5/
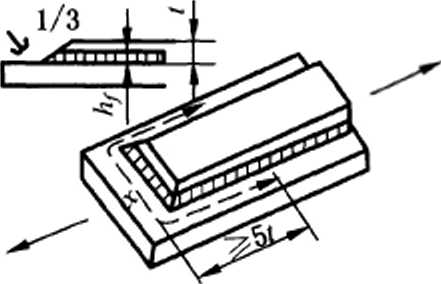
2.34
弧形翼缘板和腹板之间的K形焊 缝(O.Q)
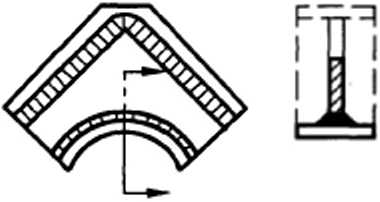

2.4
2.41
焊缝垂直于力的方向,用K形焊缝(SQ) 连接的十字形接头
翼缘板和腹板之间的K形焊(S.Q)。集中 载荷垂直于焊缝,作用在腹板平面内
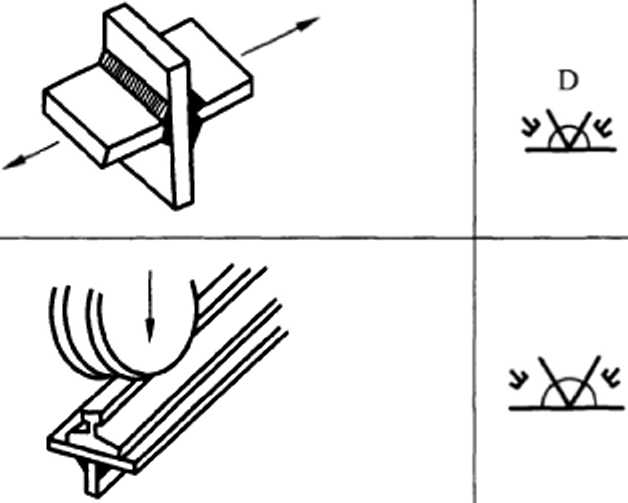
应力集中情况等级K2——中等应力集中(续)
构件接头型式的标号
说明
代号
用K形焊缝(S.Q)连接承受弯曲或剪切应 力的零件

应力集中情况等级K3—严雨应力集中
构件接头型式的标号
说明
代号
3.1
焊缝垂直于力的方向,用对接焊缝(O.Q) 连接不同厚度的零件。不对称斜度1/2.
或对称无斜度
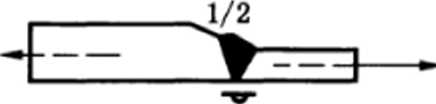


3.11
有背面垫板而无封底焊缝的对接焊,背面 垫板用间断的定位搭焊缝固定

3.12
管件对接焊,对焊根部用背面垫件支承, 但无封底焊缝
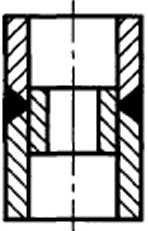
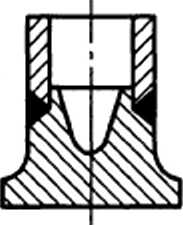
焊有辅助角撑板.各扁钢的交叉处对接焊
3.13 (O.Q),焊缝端头经打磨以防止出现应力
集中
3.2
焊缝垂直于力的方向,用角焊缝(O.Q)将 零件焊接到连续的主构件上,这些零件仅 承受主构件所传递的小部分载荷
>ploo或><

用连续角焊缝(O.Q)连接腹板,加强筋或 横隔板
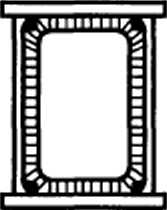
3.31
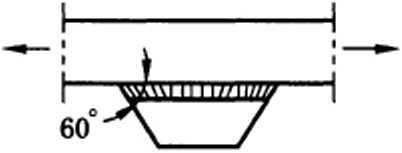
焊缝平行于力的方向,用对接焊缝(()∙Q) 将零件焊接到连续构件的边缘上,这些零 件的端部有斜度,焊缝端头经打磨.以避 免岀现应力集中 焊缝平行于力的方向,将零件焊接到连续 构件上。这些零件的端部有斜度或圆角。 焊缝端头相当于IO倍厚度的长度上为角 焊(S.Q),焊缝端头经打磨以避免出现应 力集中
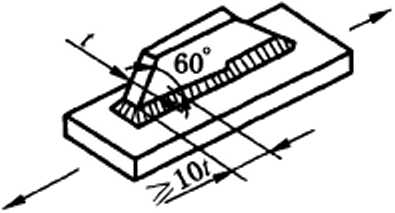
应力集中情况等级K3——-严重应力集中(续)
构件接头型式的标号
说明
代号
3∙32
穿过连续构件伸岀一块板,板端沿力的方 向有斜度或圆角,在相当于IO倍厚度的 长度上用K形焊缝(O.Q)固定
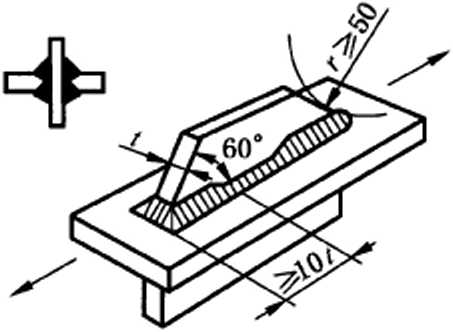
3∙34
3.35
3.36
3.4
3.41
焊缝平行于力的方向,用指定范围内的角 焊缝(S.Q)将扁钢焊接到连续构件上。其 中 Zi<1.5z2
在构件端部用角焊缝(SQ)固定连接板, 其中∕1<∕2β在单面连接板情况下,应考 虑偏心载荷
焊缝平行于力的方向,将加强筋焊接到连 续构件上,焊缝端头相等于io倍厚度的 长度上为角焊(S.Q),且经打磨以避免出 现应力集中
焊缝平行于力的方向,用间断角焊缝 (O.Q)或用焊在缺口间的角焊缝(O.Q)将 加劲肋固定到连续构件上
焊缝垂直于力的方向,用K形焊缝(O.Q) 作成的十字形接头
翼缘板和腹板之间的K形焊缝(().Q)φ 集中载荷垂直于焊缝,作用在腹板平面内
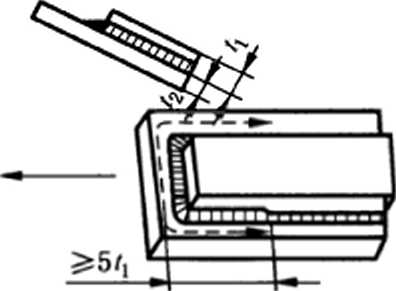
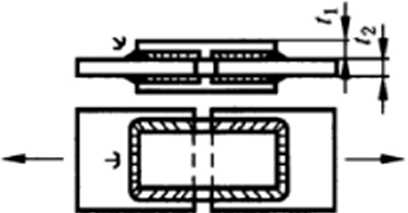

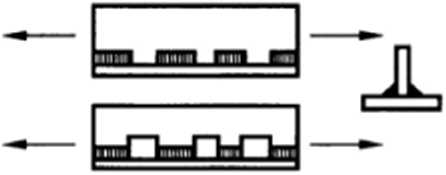
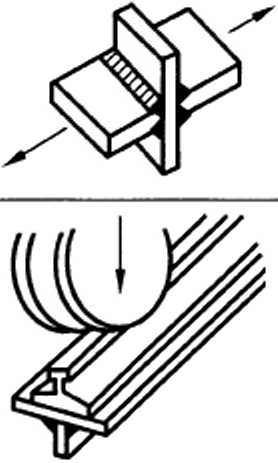

用K形焊缝(O.Q)连接承受弯曲应力和 剪切应力的零件

3.7
用角焊缝(SQ)将型钢或管子焊到连续构 件上
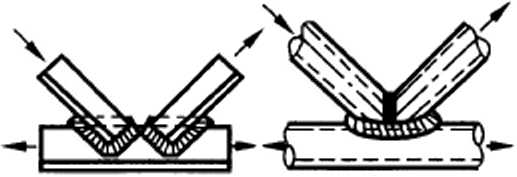
应力集中情况等级K4—非常严重的应力集中
构件接头型式的标号
说明
4.1
焊缝垂直于力的方向,用对接焊缝(O.Q) 连接不同厚度的零件。不对称无斜度

在扁钢交叉处焊缝垂直于力的方向的对 接焊(O.Q)(无辅助角撑)
在相交零件间(十字形接头)焊缝垂直于 力的方向的单边坡口焊
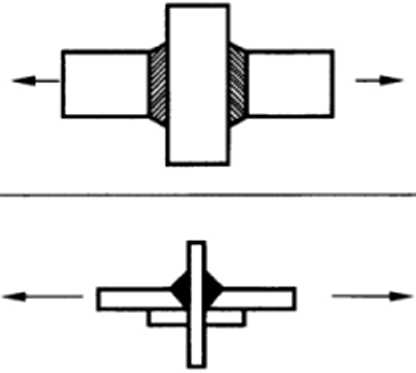
代号
X
X
4.3
焊缝平行于力的方向,将端部呈直角的零 件焊接到连续构件的侧面
/Iff1
4.31
焊缝平行于力的方向,用角焊缝(O.Q)将 端部呈直角的零件焊到连续主构件上。 零件承受由主构件传递来的大部分载荷
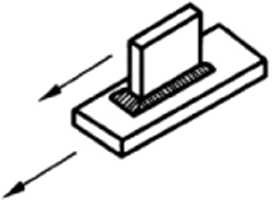

4.32
穿过主构件伸出一块端部呈直角的平板, 且用角焊缝(()・Q)固定
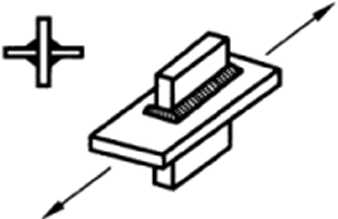
4.33
焊缝平行于力的方向,用角焊缝(().Q)将 扁钢焊接到连续构件上
4.34
用角焊缝(()∙Q)固定连接板(八=如),在 单面连接板的情况下,应考虑了偏心载荷
4.35
在槽内或孔内,用角焊缝(O.Q)将一个零 件焊接到另一个上
4.36
用角焊缝(O.Q)或者对接焊缝(().Q)将连 接板固定在两连续的主构件之间
|
应力集中情况等级KI——非常严重的应力集中(续) | |||
|
构件接头型式的标号 |
说明 |
图 |
代号 |
|
4.4 |
焊缝垂直于力的方向,用角焊缝(0.Q)作 成的十字接头 |
D A | |
|
4.41 |
翼缘板和腹板之间的角焊(().Q)o集中载 荷垂直于焊缝,作用在腹板平面内 |
æ | |
|
4.5 |
用角焊缝(().Q)连接承受弯曲和剪切应力 的零件 |
D A | |
|
4.6 |
用角焊缝(()∙Q)将型钢或管子焊接到连续 构件上 |
K | |
附录L
(规范性附录)
塔式起重机各机构电动机的初选
L.1电动机的型式
L.1.1塔式起重机的主要机构一般选用起重冶金用系列异步电动机、直流电动机,或适合于塔式起重 机使用特点的其他电动机。
L.1.2在具有爆炸性气体的危险场合使用的塔式起重机,应选防爆系列起重用电动机。
L.2电动机功率的初选方法
L.2.1稳态计算功率法
L.2.1.1起升机构
L.2.1.1.1稳态起升功率
稳态起升功率PN按式(Ll)计算。
式中:
PN —电动机的稳态起升功率,单位为千瓦(kW);
PQ—同式(67);
Ptl —一起升速度,单位为米每秒(m/s);
η —起升机构传动装置和绳轮系统总效率。
L.2.1J.2 电动机初选
对未能提供JC值、CZ值及相应计算数据的电动机,可以用式(L.1)的计算结果,并考虑该机构实 际的接电持续率(参见附录M),直接从电动机样本上初选出所需要的电动机。
L.2.1.2 运行机构
L.2.1.2.1 稳态运行功率
稳态运行功率PN按式(L.2)计算。
PN =]亲3 ........................( L∙2 )
1 OooW?
式中:
PN — 电动机的稳态运行功率,单位为千瓦(kW);
P)—同式(79);
Py —运行速度,单位为米每秒(m/s);
η —-运行机构的总传动效率;
m——运行机构电动机台数。
L.2.1.2.2 电动机初选
用式(L.2)计算所得的结果乘以一个大于1的系数,从电动机样本上初选所需的电动机。对塔式起 重机,此系数为1.1〜1.3,运行速度高者取大值。
L.2.1.3小车变幅机构
L.2.1.3.1稳定变幅功率
小车变幅机构,如果卷筒上的转矩为M,电动机稳定变幅功率P、,,可以按式(L.3)计算。
MX-
N =9 550? 式中:
PN——电动机的稳态变幅功率,单位为千瓦(kW);
M——卷筒的转矩,单位为牛顿米(N・m); n 卷筒的转速,单位为转每分(r∕min) J η —变幅机构总传动效率。
........................(L.3 )
L.2.1.3.2 电动机初选
用式(L.3)计算所得的结果从电动机样本上初选所需的电动机。
L.2.2等效功率法
L.2.2.1回转机构
L.2.2.1.1等效功率已
等效功率P,按式(L.4)计算。
P _ M~ X 〃 '=9 5501?
式中:
Pf —回转机构电动机的等效回转功率,单位为千瓦(kW);
(L.4 )
Mfg——等效回转稳态阻力矩,单位为牛顿米(N・m); n —回转速度,单位为转每分(r/min); η——回转机构的总传动效率。
L.2.2.1.2 电动机初选
用式(L.4)计算所得的结果从电动机样本上初选所需的电动机。当惯性力较大时,应将惯性力与等 效阻力相加,以考虑惯性力的影响。
L.2.2.2动臂变幅机构
L.2.2.2.1动臂变幅机构电动机的等效变幅功率
动臂变幅机构电动机的等效变幅功率由式(L.5)计算。
P PH XPb ,=1 OOOi
........................(L.5 )
式中:
Pf 一一动臂变幅机构电动机的等效变幅功率,单位为千瓦(kW);
PIll—同式(91);
S——变幅动滑轮组的移动速度,单位为米每秒(m/s); η —变幅机构及绳轮系统总传动效率。
L.2.2.2.2 电动机初选
用式(L.5)计算所得的结果从电动机样本上初选所需的电动机。
L.2.3稳态负载系数法
稳态负载系数法适用于各机构中能给出有关资料的绕线转子异步电动机。
L.2.3.1所选电动机的功率
所选电动机的功率按式(L. 6)或式(L.7)计算。
P,,≥GPN ........................( L.6 )
Pn ≥ GPt ........................( L.7 )
式中:
P,l ―所选电动机在相应的CZ值和实际接电持续率JC值下的功率,单位为千瓦(kW);
G——稳态负载平均系数;
PN——电动机的稳态功率,见式(L.1)〜式(L.3);
Pr——电动机的等效功率,见式(L.4)〜式(L .5)。
各种塔式起重机各机构的接电持续率JC,稳态负载平均系数G,均应根据实际的载荷情况计算。 如在设计时,无法获得其详细资料,则可参照附录M中的JC、CZ、G值选取。
L.2.3.2电动机的初选
用式(L .6)、式(L. 7)计算所得的结果从电动机样本上初选所需的电动机。
L.2.4等效接电持续率经验法(用于起升机构)
L.2.4.1等效接电持续率JC'
与机构工作级别对应的初选电动机用的等效接电持续率JC',见表L.1。
表L.1机构工作级别与等效接电持续率JC'
|
起升机构工作级别 |
电动机等效接电持续率JC' % |
|
Ml 〜M3 |
15 〜25 |
|
M4 〜M5 |
25 |
|
M6 |
40 |
L.2.4.2初选电动机
根据式(L.1)计算的结果,按照起升机构工作级别,由表L.1査出等效接电持续率JC'后,从电动机
样本上可初选岀所需的电动机。
L∙2∙5等效平均功率法
L.2.5.1等效平均功率法的计算
得到电动机的负荷图(见图L.1)后,便可计算岀等效平均阻力矩M,“和等效平均功率P*,并初 选岀所需的电动机。
带载提升
带载下降
空载提升
空載下擘
Λ∕]2
起升运动
M2
Ms
tI
水平运动
Ml
‘I 1 &
M9 MIO
带载逆风
带载顺风
循环1
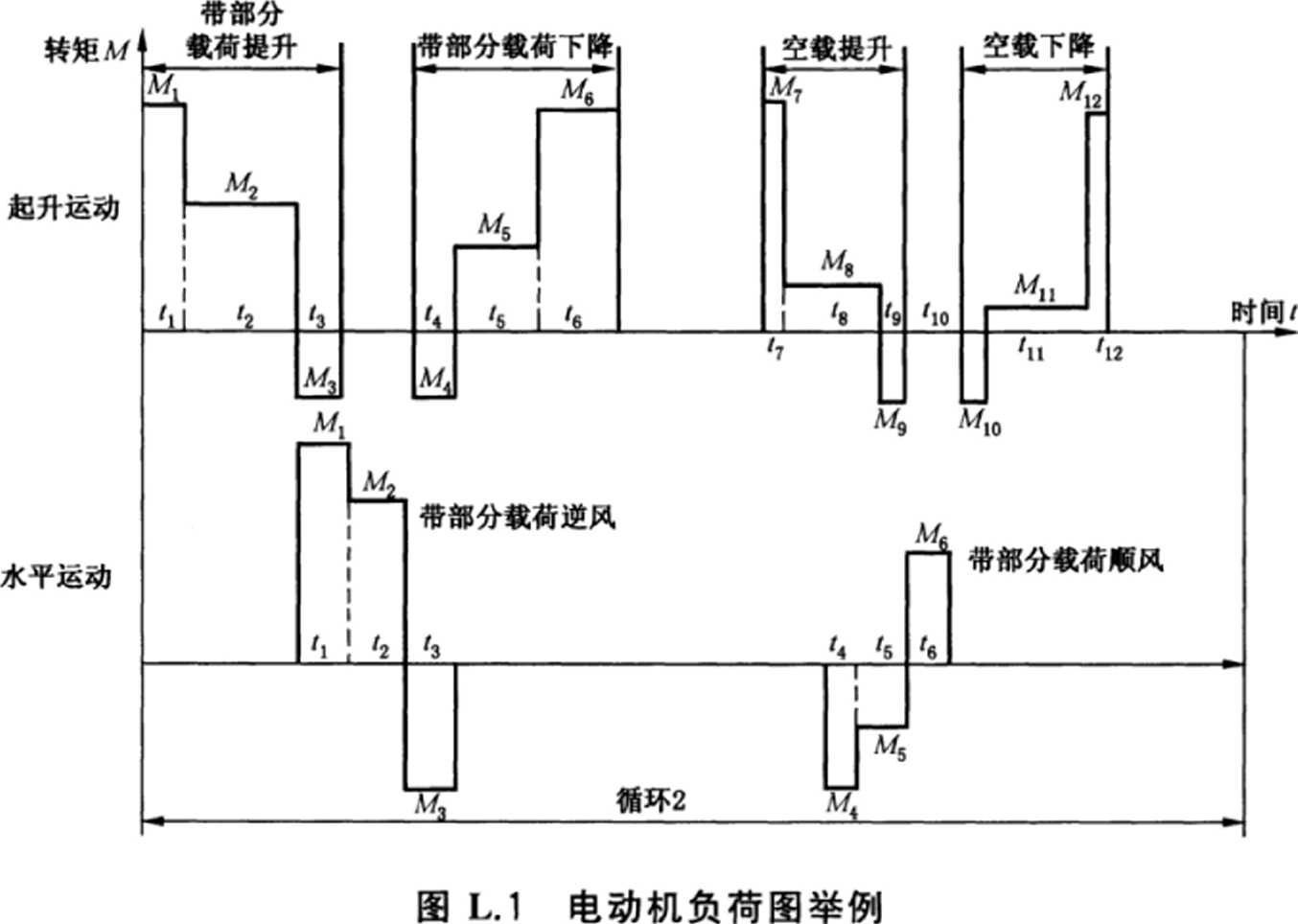
等效平均阻力矩按式(L∙8)计算。
Mf/. +…+M"rt
(L.8 )
式中:
Mm
等效平均阻力矩,单位为牛顿米(N・m); 发生不同转矩的时间段,静止时间不计入;
、…、MN——为包括电动机转动及移动质量全部惯性力在内的各个阶段的转矩值。 在变载荷情况下,至少取IO个连续工作循环中载荷最大的一个循环 计算。
等效平均功率按式(L.9)计算。
P _ MM 皿=9 5507
........................(L.9 )
式中:
PS——等效平均功率,单位为千瓦(kW);
MmfJ——同式(L.8);
n --电动机转速,单位为转每分(r/min);
η —机构传动装置和绳轮系统的总效率。
L.2.5.2电动机的初选
如果电动机的一次负载运行时间不超过10 min,按式(L.9)计算结果从电动机样本上选出的S3工 作制的电动机即为所要求的电动机。
附录M (资料性附录) 塔式起重机机构电动机容■选择计算中的JCXZ.G值
塔式起重机每个机构的接电持续率JC值、惯量增加率C与折合的每小时全起动次数Z的乘积 CZ值以及稳态负载平均系数G值,应根据实际载荷及控制情况计算,如设计时无法获取其详细资料, 则可参考表M.1选取。
表M.1机构的JC、CZ、G值
|
塔式起重 机类型 |
用途 |
起升机构 |
回转机构 |
运行机构 |
小车变幅机构 |
动臂变幅机构 | ||||||||||
|
JC% |
CZ |
G |
JC⅛ |
CZ |
G |
JC⅝ |
CZ |
G |
JC% |
CZ |
G |
JC% |
CZ |
G | ||
|
1 |
不经常使用 |
25 |
150 |
G2 |
25 |
150 |
G2 |
15 |
150 |
Gl |
25 |
150 |
G2 |
15 |
150 |
G2 |
|
货场用 |
25 |
150 |
G2 |
25 |
150 |
Gz |
15 |
150 |
Gl |
25 |
150 |
Gz |
15 |
150 |
G2 | |
|
钻井平台维修用 |
25 |
300 |
G2 |
25 |
300 |
G2 |
15 |
150 |
Gl |
25 |
300 |
G2 |
15 |
300 |
G2 | |
|
船舶修理厂用 |
40 |
300 |
Gz |
40 |
300 |
G2 |
15 |
150 |
Gl |
25 |
300 |
G2 |
15,25 |
300 |
G2 | |
|
2 |
建设用自行架设式 |
25,40 |
300 |
G2 |
25,40 |
300 600 |
G2 |
15,25 |
150 300 |
Gl G2 |
25,40 |
300 |
G2 |
15,25 |
300 |
G2 |
|
建设用组装式 |
40,60 |
300 600 |
G2 G3 |
40 |
600 |
G2 |
15 25 |
150 300 |
Gl G2 |
25,40 |
300 |
G2 |
25 |
300 |
G2 | |
|
3 |
造船厂舷装用 |
40 |
300 600 |
G? |
40 |
600 |
Gz |
25 |
300 |
G2 |
25 |
300 |
GZ |
25 |
300 |
G2 |
|
港口集装箱装卸用 |
40 |
300 600 |
G2 |
40 |
600 |
G2 |
25 |
300 |
G2 |
25 |
300 |
Gt |
25 |
300 |
G2 | |
|
造船用 |
40,60 |
300 |
G2 G3 |
40,60 |
300 600 |
G2 |
15 25 |
150 300 |
Gl Gz |
40 |
300 |
Gt |
25 |
300 |
G2 | |
|
使用抓斗工作 |
40,60 |
300 |
G2 G3 |
40,60 |
300 600 |
G2 |
15 25 |
150 300 |
Gl G2 |
40 |
300 |
G2 |
25 |
300 |
G2 | |
注1:电动机的接电持续率JC值,在一个工作循环时间小于10 min时,按式(127)计算;在一个工作循环时间大
于10 min时,需与电动机生产厂家联系。
注2: G的具体数值见表M.2β
表M.2 G的具体数值
|
G |
起升机构 |
运行机构 |
回转机构 |
变幅机构 |
|
Gl |
0.70 |
0.75 |
0.50 |
0.70 |
|
G2 |
0.80 |
0.80 |
0.60 |
0.75 |
|
G3 |
0.90 |
0.85 |
0.70 |
0.80 |
|
Gi |
1.00 |
0.90 |
0.80 |
0.85 |
附录N
(规范性附录) 电动机的过载校验
N.1起升机构电动机
起升机构电动机按式(N∙l)进行过载校验计算。
P > H PQpU
(N.1 )
N λm 1 OOO7
式中:
PN——电动机的额定功率,单位为千瓦(kW);
PQ---同式(67);
S —额定起升速度,单位为米每秒(m/s);
η —起升物品时起升机构传动装置和滑轮组的总效率;
' —相对于PN时的电动机最大转矩倍数(电动机制造厂提供),对于直接全压起动的笼型电动 机,堵转转矩倍数λw≥2.2;
H —系数,按有电压损失(交流电动机一15%,直流电动机和变频电动机不考虑)、最大转矩或堵 转转矩有容差(绕线转子异步电动机一10%,笼型异步电动机一15%,直流电动机和变频电 动机不考虑)、起升额定载荷等条件确定,绕线转子异步电动机和笼型异步电动机取H = 2.0〜2.5,变频异步电动机取H = 2.2,直流电动机取H = I.4;
m --电动机台数。
N.2运行机构和小车变幅机构电动机过载校验
运行机构电动机过载校验按式(N.2)计算。
rp Z 丄 、丄 D "1 Py I ΣJ X 〃 [P 好+~)+Pw2]ττ间+恭疝;
...............(N.2 )
式中:
PN —电动机的额定功率,单位为千瓦(kW);
m --电动机台数;
AAS —相对于Pn的平均起动转矩倍数,其值应根据所选电动机的义,”值及其控制系统方案确定, 通常情况下可参考下列取值;绕线转子异步电动机取1.7,采用频敏变阻器时取1,笼型异 步电动机取0.9λw(相对于PN时的电动机最大转矩倍数,由电动机制造商提供),串励直 流电动机取L9,复励直流电动机取1.8,他励直流电动机取1.7,对变频调速电动机取1.7; PV —运动部分所有质量的重力,包括吊运物品和起重机或小车等质量的重力,单位为牛顿(N); ω —运行摩擦阻力系数,对车轮为滑动轴承W= 0.015;对车轮为滚动轴承W= 0. 006; ∕nu —坡道阻力系数,小车变幅机构按2%,运行机构按0.5%,或按出现的实际坡度计算坡道 载荷;
Pw2 —工作状态风载荷,按4.3.3.1确定,单位为牛顿(N);风载荷按最不利的水平方向作用的静 力载荷;
yy --运行速度,单位为米每秒(m/s);
η —机构总传动效率;
ΣJ —机构对电动机轴的总惯量,即包含直线运动质量和传动机构的全部质量的惯性折算到电 动机轴上的转动惯量和电动机轴上自身的转动惯量之和,单位为千克平方米(kg∙ m2);
n --电动机的额定转速,单位为转每分(r/min);
tq —运行机构起动时间,单位为秒(s)。
N.3回转机构电动机过载校验
回转机构电动机过载校验按式(N.3)计算。
P > H (Mwt + MamaX + MW + Mcι∕ ) ”
........................(N.3)
V —応 X 9 550辺
式中:
PN —电动机的额定功率,单位为千瓦(kW);
H —系数,绕线转子异步电动机取H = L55,笼型异步电动机取H = 1.6,直流电动机取H=I;
m --电动机台数;
* 一同式(N.1);
Mm ——回转摩擦阻力矩,主要是回转支承装置的摩擦阻力矩,单位为牛顿米(N・m);
MamaX—回转最大坡道阻力矩,单位为牛顿米(N ∙ m);
MW —由Pw2〔见式(10)]引起的最大风阻力矩,单位为牛顿米(N・m);
MaI ——由钢丝绳正常偏摆角勾计算的回转水平阻力矩,单位为牛顿米(N・m);
i —回转机构总传动比;
7 ——回转机构总传动效率;
n --电动机的额定转速,单位为转每分(r/min) 0
N.4动臂变幅机构电动机过载校验
动臂变幅机构电动机过载校验按式(N.4)进行。
P > H Σ F max %
N " mλ,n X 1 000"
........................(N.4 )
式中:
PN ——电动机的额定功率,单位为千瓦(kW);
H ——同式(N.3);
m --电动机台数;
Aw, ——同式(N.1);
∑Fmax—包括臂架及平衡系统的自重载荷、总起升载荷、风载荷P*[见式(IO)L由起重绳正常 偏角S计算的水平力及臂架系统各转动饺点的摩擦力在变幅动滑轮组上的分力和,在 各变幅位置时所有值中取其最大变幅力,单位为牛顿(N);
S ―变幅动滑轮组的移动速度,单位为米每秒(m/s);
η —变幅机构总传动效率。
附录O
(规范性附录) 电动机的发热校验
0.1直接起动方式下笼型异步电动机发热校验
0.1.1直接起动方式下笼型异步电动机发热校验应满足式(0.1)的要求。
/ I / × W2 × ]0一3 \
Ck(I — 7IN)P si T >(1 一 )P,"n + (PSl XT^X ‘E--⅛7----) ......( 0∙l)
X IeV 1OU ,
式中:
Ck —与电动机类型有关的修正系数,由制造厂商提供,如未提及,则对于4极或4极以上的电 动机取C4 = I;
7.v——电动机在PsI时的效率;
PSl—一连续工作制(SI)时电动机的额定功率,单位为千瓦(kW);
T--个工作循环的总时间,单位为秒(S),按式(().2)计算;
ηm——电动机在功率P,,,时的效率;
Pln--个循环期内恒速工作时电动机的平均功率,单位为千瓦(kW),按式(0.3)计算;
g--个循环期内恒速工作的时间,单位为秒(s);
ID ——电动机的起动电流,单位为安培(A);
IN —电动机的额定工作电流,单位为安培(A);
捉--个循环期内起动制动的等效时间,单位为秒(s),按式(().4)计算;
n,n --电动机在P,”时的转速,单位为转每分(r∕min);
J —所有运动质最换算到电动机轴上的总转动惯量,单位为千克二次方米(kg・m2)0
T=ZN+ Ze+,s ........................(。・2 )
式中:
IS--个循环期内停止的时间,单位为秒(s);
式中其他符号同式(O.l)o
式中:
MW——不考虑起制动阶段的电动机平均阻转矩,单位为牛顿米(N・m);
式中其他符号同式(O.l)o
tE = 3oQ X (d< -I- 0.5(Ji + 3/) ........................(().4 )
式中:
dr —每小时全起动次数;
di ―每小时点动或不完全起动次数;
/ —每小时电气制动次数;
Me—电动机平均加速转矩,单位为牛顿米(N・m),按式(0.5)计算;
式中其他符号同式(O.l)o
MU = Mdtl — Mlll
(0.5 )
式中:
Mdq — 同式(72),电动机平均起动转矩,单位为牛顿米(N・m);
Mm—不考虑起制动阶段的电动机平均阻转矩,单位为牛顿米(N∙ m);
式中其他符号同式(O.4)o
0.1.2当缺少电动机相关数据而无法进行上述发热校验时,可按式(0.6)进行近似计算,或通过对机构 的模拟实验进行校验。
式中:
PN — 电动机额定功率,其工作制为S3,接电持续率JC⅛与实际机构的值相同,单位为千瓦
(kW);
Mrt—最不利工作循环的等效平均阻力转矩,单位为牛顿米(N・m),按式(0.7)计算;
nm --电动机转速,单位为转每分(r/min);
KZ —系数,按()丄3确定。
Mre =
∕∑AO7
√^∑Γ^
........................(0.7 )
式中:
Mri—工作时间L内相应的电动机阻力转矩,包括启、制动转矩,单位为牛顿米(N・m);
Ii —机构工作循环中各运转时间,不包括停机时间,单位为秒(s)。
当式(0.7)中的数据不能确定时,可按式(0.8)取近似值。
Mre =Mr X KG ........................( ().8 )
式中:
Mr — 电动机静阻力转矩,单位为牛顿米(N・m);
KG—系数,对起升、变幅、运行机构取KG=O.67〜0.79;对回转机构取KG=O.79。
0.1.3系数KZ按式(0.9)计算。
........................(0.9 )
式中:
KZ——同式(0.6);
Z ——电动机每小时折算全起动次数,按式(0.10)计算。
Z =de + gdi + rf
........................(0.10 )
式中:
Z ---同式(0.9);
dc —每小时全起动次数;
di —每小时点动或不完全起动次数;
f ——每小时电制动次数;
g、厂——折算系数,由生产厂给定,一般可按表0.1确定。
当缺少实际数据时,可按表()・2确定Z值。
对于釆用S4、S5工作制电动机的情况,只需根据相应的JC%值和Z值确定功率P”,此时KZ取 为Ie
表0.1 g、r值
|
电动机类型 |
g |
r |
|
绕线异步电动机 |
0.25 |
0.80 |
|
笼型异步电动机 |
0.50 |
3.00 |
表0.2电动机每小时折算全起动次数Z值
|
塔式 起重机 类别 |
用途说明 |
起升机构 |
回转机构 |
运行机构 |
小车变幅机构 |
动臂变幅机构 | |||||
|
JC⅛ |
Z |
JC% |
Z |
JC⅛ |
Z |
JC⅛ |
Z |
JC% |
Z | ||
|
1 |
不经常使用 |
25 |
60 |
25 |
60 |
15 |
60 |
25 |
60 |
15 |
60 |
|
货场用 |
25 |
60 |
25 |
60 |
15 |
60 |
25 |
60 |
15 |
60 | |
|
钻井平台维修用 |
25 |
150 |
25 |
150 |
15 |
60 |
25 |
150 |
15 |
150 | |
|
船舶修理厂用 |
40 |
150 |
40 |
150 |
15 |
60 |
25 |
150 |
15 25 |
150 | |
|
2 |
建设用自行架设式 |
25 40 |
150 |
25 40 |
150 300 |
15 25 |
60 150 |
25 40 |
150 |
15 25 |
150 |
|
建设用组装式 |
40 60 |
150 300 |
40 |
300 |
15 25 |
60 150 |
25 40 |
150 |
25 |
150 | |
|
3 |
造船厂艄装用 |
40 |
150 300 |
40 |
300 |
25 |
150 |
25 |
150 |
25 |
150 |
|
港口集装箱装卸用 |
40 |
150 300 |
40 |
300 |
25 |
150 |
25 |
150 |
25 |
150 | |
|
造船用 |
40 60 |
150 |
40 60 |
150 300 |
15 25 |
60 150 |
40 |
150 |
25 |
150 | |
|
使用抓斗工作 |
40 60 |
150 |
40 60 |
150 300 |
15 25 |
60 150 |
40 |
150 |
25 |
150 | |
0.2绕线转子异步电动机及变频控制笼型电动机的发热验算
0.2.1按照G值、JC值、CZ值选用电动机的发热校验
0.2.1.1起升机构电动机的发热校验
0.2.1.1.1稳态平均功率,按式(0.11)计算:
PS =G X
PQS
1 OOO ŋ
(().11 )
式中:
PS—稳态平均功率,单位为千瓦(kW);
G —稳态负载平均系数,参见附录M的表M.1,同式(L.6);
PQ — 同式(67),总起升载荷,单位为牛顿(N);
Pq ——物品起升速度,单位为米每秒(m/s);
η——起升物品时起升机构传动装置和绳轮系统的总效率。
0.2.1.1.2 JC值参见附录M。
0.2.1.1.3 CZ值按下列规定计算:
a) 折合的全起动次数Z按式(0.10)计算;
b) 惯量增加率C按式(0.12)计算;
C=LL+ L ........................( ().12 )
J d
式中:
C —惯性增加率;
JtI — 电动机转动惯量,单位为千克二次方米(kg・m2);
J,——电动机以外,运动质量折算到电动机轴上的转动惯量,单位为千克二次方米(kg∙ m2)o
C)惯量增加率C与折合的每小时全起动次数Z乘积CZ是起制动影响电动机发热的重要参数。 CZ值的常用值为150.300350和600。
0.2.1.1.4根据按().2.1.1.1〜().2.1.1.3确定的PSJC及CZ值进行发热校验。所选用的电动机在相 应CZ值、JC值下,如其输出功率P满足式(0.13)的要求,则电动机发热校验合格。
P ≥ Ps ........................( ().13 )
O.2.1.2运行机构和小车变幅机构的发热校验
0.2.1.2.1稳态平均功率PS按式(0.14)计算。
PS=G[P* +叽) + Pw3]X 湯面 ........................(().14)
式中:
PS——稳态平均功率,单位为千瓦(kW);
G —稳态负载平均系数,参见表M.1,同式(L.6);
Pς —运动部分所有质量的重力,包括吊运物品和起重机或小车等质量的重力,单位为牛顿 (N);
ω —运行摩擦阻力系数,对车轮为滑动轴承g = 0.015;对车轮为滚动轴承,3 = 0.006;
叽—坡道阻力系数;对运行机构,按0.005选取;对小车变幅机构,按1%选取;
Pw3—风阻力,单位为牛顿(N),见式(10);
% ―起重机或小车运行速度,单位为米每秒(m/s);
m——电动机台数;
η —运行机构总传动效率。
0.2.1.2.2 根据按O.2.1.2.1确定的Ps,按().2.1.1.2〜().2.1.1.4进行发热校验。
O.2.1.3回转机构的发热校验
O.2.1.3.1稳态平均功率按式(0.15)计算。
P _r (MM + Ma + MW) n
(0.15 )
尸 S=GX A rcn :
9 550τZnV
式中:
PS——稳态平均功率,单位为千瓦(kW);
G ―稳态负载平均系数,参见表M.1,同式(L.6);
Mm ——回转摩擦阻力矩,主要是回转支承装置的摩擦阻力矩,单位为牛顿米(N・m);
Ma ——等效坡道阻力矩,按坡道阻力矩0.7倍计算,单位为牛顿米(N・m);
MW——由Pw3〔见式(IO)Bl起的风阻力矩,单位为牛顿米(N・m);
m --电动机台数;
i ——回转机构总传动比;
η ——回转机构总传动效率。
0.2.1.3.2根据按O.2.1.3.1确定的PS ,按().2.1.1.2〜().2.1.1.4进行发热校验。
O.2.1.4动臂变幅机构电动机发热验算
O.2.1.4.1稳态平均功率按式(0.16)计算。
PS =GVb X
1 OoO 叫
........................(0.16 )
式中:
PS—稳态平均功率,单位为千瓦(kW);
G ——稳态负载平均系数,参见表M.1,同式(L.6);
Pb ―额定变幅速度,单位为米每秒(m/s);
Pli——在第i个变幅位置,由包括臂架及平衡系统自重、总起升载荷、风载荷PW3、由起重绳偏摆 角。J计算的水平力及臂架系统各转动皎点的摩擦力等产生的在变幅动滑轮组上的分力之 和,单位为牛顿(N);
Ii —一每一变幅位置间隔所需要时间,单位为秒(s);可由变幅动滑轮组行程/及移动速度瓦按式 (0.17)算出;
m --电动机台数;
η——变幅机构总传动效率。
Pb
式中:
It —变幅动滑轮组在变幅位置i处的行程,单位为米(m);
Z.÷.——变幅动滑轮组在变幅位置/ + 1处的行程,单位为米(m);
Pb ——变幅动滑轮组的移动速度,单位为米每秒(m/s)。
O.2.1.4.2根据按O.2.1.4.1确定的Ps,按().2.1.1.2〜().2.1.1.4进行发热校验。
0.2.2按机构工作级别及其等效接电持续率进行电动机的发热校验
0.2.2.1起升机构电动机的发热校验
0.2.2.1.1起升机构电动机的静功率按式(0.18)校验。
P = PQPq
(OJ 8 )
N 1 0007
式中:
PN—起升机构电动机的静功率,单位为千瓦(kW);
PQ---同式(67);
Pq —物品起升速度,单位为米每秒(m/s) O
O.2.2.1.2机构工作级别与电动机等效接电持续率JC'值的关系见附录L的表L.l0
O.2.2.1.3电动机的发热校验按表M.1査出机构所需的电动机等效接电持续率,并采用式(0.18)算出 起升机构电动机所需的电动机静功率,电动机在相应接电持续率下的输岀功率应大于或等于静功率,则 电动机的发热校验通过。
O.2.2.2运行机构和小车变幅机构的发热校验
O.2.2.2.1运行机构电动机发热计算
运行机构电动机发热计算功率按式(0.19)计算。
Ps=fx 忡邮+ 叽)+Pw3]Xr⅛ + 1⅛⅛⅛)............(。・】9)
式中:
PS —运行机构电动机发热计算功率,单位为千瓦(kW);
m --电动机台数;
PE —运动部分所有质量的重力,包括吊运物品和起重机或小车等质量的重力,单位为牛顿 (N);
ω——运行摩擦阻力系数,对车轮为滑动轴承,3 = 0.015;对车轮为滚动轴承,3 = 0.006;
7丄一一坡道阻力系数;对运行机构,按0.5%选取;对小车变幅机构,按1%选取;
Pw3—正常工作状态下的风阻力,单位为牛顿(N),见式(10);
Py —起重机或小车运行速度,单位为米每秒(m/s);
7 —运行机构总传动效率;
ΣJ—机构对电动机轴的总惯量,即包含直线运动质量和传动机构的全部质量的惯性折算到电 动机轴E的转动惯量和电动机轴上自身的转动惯量之和,单位为千克二次方米(kg・ m2) J
” ——电动机的额定转速,单位为转每分(r/min);
Zq —机构起动时间,单位为秒(s)。
O.2.2.2.2 电动机发热校验
按表L.1査出机构所需的电动机等效接电持续率,并采用式(0.15)算出运行/小车变幅机构所需的 电动机发热计算功率,电动机在相应接电持续率下的输出功率应大于或等于发热计算功率,则电动机的 发热校验通过。
0.2.3按平均损耗法验算电动机发热
按()・2.1方法验算的电动机发热,仅对塔式起重机采用YZR系列交流异步绕线转子电动机最为适 合,而对其他型式的电动机,其他工况与控制方式差别较大的塔式起重机,特别是对采用涡流制动器、晶 闸管定子调压调速系统的电动机,可采用推荐的平均损耗法进行发热校验。
按平均损耗法验算电动机发热的基本步骤是:
a) 确定该电动机在塔式起重机工作机构中的典型负载图;
b) 考虑各运行时段的电动机数据,如停机时散热条件恶化等冷却系数标么值,固定损耗与可变
损耗的比值等,计算出电动机运行后的温升与连续定额时温升的比率Rn ; C)当电动机为断续定额基准时,求出断续定额与连续定额的损耗比PE d)按式(0.20)求出运行后的温升与断续定额时的温升比率Rnξo
R忒=PERft ..........
(().20 )
式中:
R*—运行后的温升与断续定额时温升的比率;
Pξ——电动机断续定额与连续定额的损耗比;
Rn —电动机运行后的温升与连续定额时温升的比率。
当R酒VI,则认为电动机发热校验合格。
附录P
(资料性附录) 液压油缸稳定性校验
油缸的稳定性可按式(P・l)校核。
F FNWSL ........................( P∙l)
ʌ nh
式中:
FN ——油缸的轴向载荷,单位为牛顿(N),爬升系统油缸按6.5.2特别是6.5.2.1.1确定,其他用途
的油缸按4.3和4.4或系统最大压力确定;按4.3和4.4确定时,分项载荷系数取为1;
Fer ——油缸的临界载荷,按式(P.2)计算,单位为牛顿(N);
KtIh―安全系数,Km=2.5〜3.5。
式中:
ki——支撑条件系数,按表P.1确定;
E —材料的弹性模量,E = 2.06×105N∕mm∖同式(53);
Ia—活塞杆横截面惯性矩,单位为四次方毫米(mπ√);
I ——油缸计算长度,按表P.1确定,单位为毫米(mm)O
表P.1油缸支撑条件系数灯和计算长度,
|
支撑方式和计算长度/ |
说明 |
h、 | |||
|
/ / / Z Z √ |
] / _ |
一端固定,一端自由 |
0.25 | ||
|
I |
两端皎接 |
1 | |||
|
■ / 颤] |
0 |
一端固定,一端钗接 |
2 | ||
|
=3 | |||||
|
V7⅛ | |||||
|
«------C |
两端固定 |
4 | |||
附录Q (规范性附录)
形状系数K,、尺寸系数K.、表面情况系数K“、腐蚀系数KC的确定
抛光试件的疲劳极限是一个试验数据,实际使用中的零件从来达不到这个数值。许多因素[如形 状、尺寸、表面情况(机加工质量)和可能的腐蚀]引起不连续性,造成“切口效应”,使零件按常规材料力 学等方法计算的许用应力值降低。分别用大于或等于1的系数K,、K八K “、K,除以抛光试件的疲劳极 限来考虑这些因素的影响。
Q l形状系数K的确定方法
形状系数K、表示有圆弧过渡的截面变化、环形槽、横向孔及轮毂固定方法等造成的应力集中。
图Q.1和图Q.2给出了适用于直径D = IO mm的形状系数K,值,其是金属材料抗拉强度的函数。
图Q.1给出的系数K,用于D∕d = 2的阶梯轴,对于其他的D/d值,K,可参用表Q.1的修正系数 求得。图Q.2给岀了一些用于孔、环形槽和键槽的K,值。
直径超过10 mm时应要引入尺寸系数KdO
图Q.1
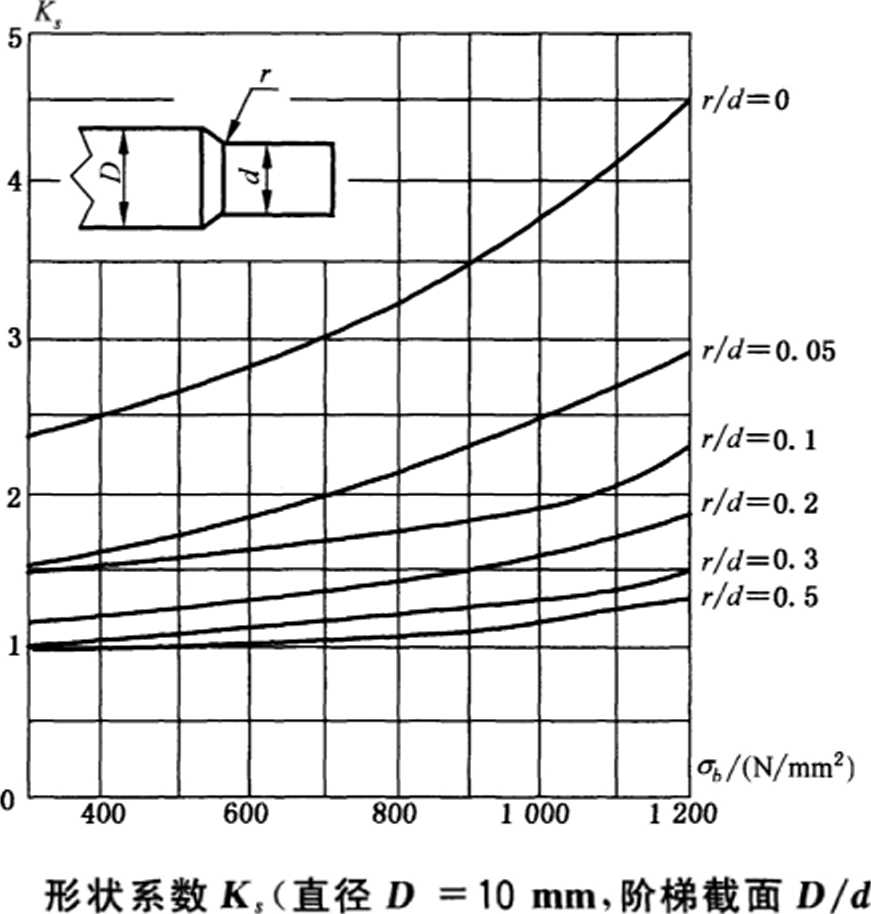
=2)
对其他的Djd值,由曲线(r∕d)+ q求得K,,表Q.1列出了修正系数q值。
表Q.1 D∕J≤2时修正系数q值
|
D/d |
1.05 |
1.1 |
1.2 |
1.3 |
1.4 |
1.6 |
2 |
|
q |
0.13 |
0.1 |
0.07 |
0.052 |
0.04 |
0.022 |
0 |
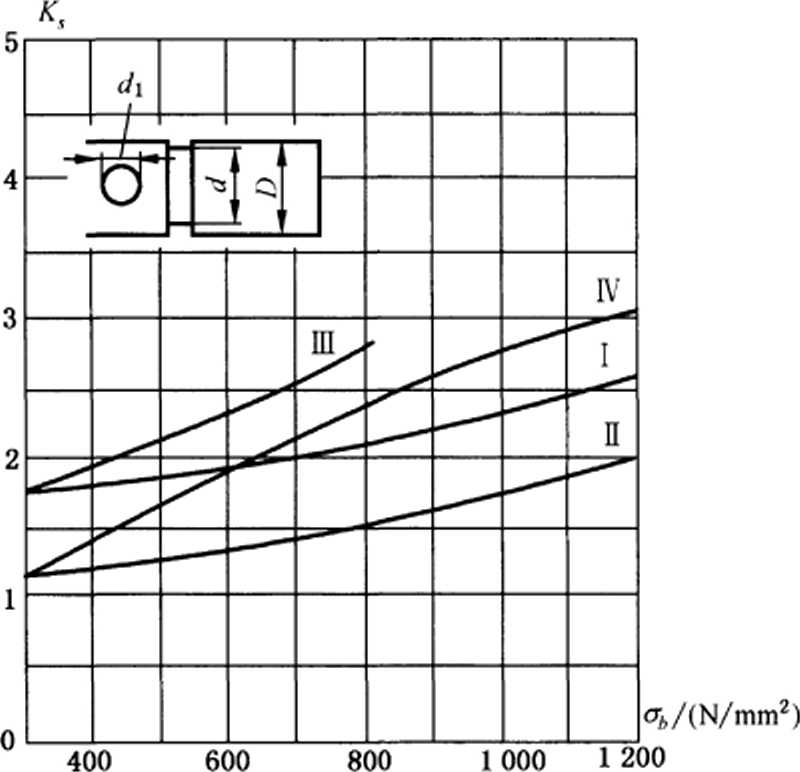
说明:
曲线I—横向孔Jl=O.175J;
曲线U—环形槽:深1 mm;
曲线[∏- 用键与轮毂相连;
曲线IV—用压配合与轮毂相连。
图Q.2形状系数KJ直径D = IO mm.孔,环型槽,键槽)
Q.2尺寸系数Kd的确定方法
直径大于10 mm时,应力集中效应增加,引入尺寸效应系数K」来加以考虑。
表Q.2给出了 d为10 mm~400 mm的系数Ktz值。
表Q.2 Kd值
|
d/mm |
IO |
20 |
30 |
50 |
IOO |
200 |
400 |
|
KtI |
1 |
1.1 |
1∙25 |
1.45 |
1.65 |
1.75 |
1.8 |
Q.3表面情况(机加工方法)系数KII的确定
经验表明,表面粗加工零件的疲劳极限比精细抛光的零件低。
用图Q.3给出的表面情况(机加工方法)系数K“来考虑这一因素,其分别是相对于磨削或用金刚 砂精细抛光的表面及粗加工的表面。
Q.4腐蚀系数Kr的确定
腐蚀对钢材的疲劳极限有非常明显的影响,用系数K,来加以考虑。
图Q.3还对淡水和海水腐蚀的两种情况给出了系数K「值。
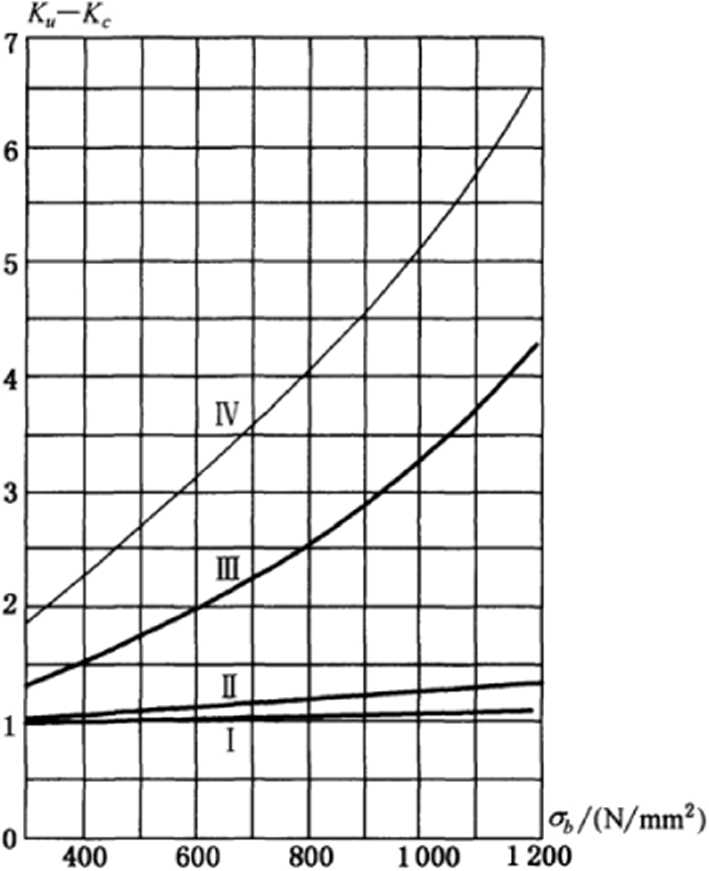
说明:
K■值一曲线I .表面磨削或精细抛光; 曲线口,表面粗加T。
K「值一曲线DI・表面受淡水腐蚀;
曲线IV,表面受海水腐蚀。
图Q.3加工系数K八腐蚀系数KC
附录R
(资料性附录)
卷筒壁和侧板厚度的计算方法
Rj 总则
本方法适用于容绳宽度B不大于三倍卷筒直径的卷筒。但对于D<∕≥l 200 mm、B>2S的卷 筒,还应进行卷筒壁的稳定性验算。
对于容绳宽度B大于三倍卷筒直径DtZ的卷筒,还应考虑弯曲和扭转的影响。
R.2焊接卷筒
R.2.1通则
本方法适用于单层和多层卷绕的钢板焊接卷筒。
R.2.2卷筒壁厚计算
对于卷筒容绳宽度不大于三倍卷筒直径的卷筒,由受力分析可知卷筒壁所受弯曲、扭转应力较小, 故按钢丝绳绕出处的压应力和局部弯曲应力计算。
R.2.2.1钢丝绳绕出处卷筒壁的压应力久按式(R.1)计算。
式中:
七一钢丝绳绕出处卷筒壁的压应力,单位为牛顿每平方毫米(N∕mm2);
S ——钢丝绳最大工作静拉力,单位为牛顿(N);
8——卷筒壁厚,单位为毫米(mm);
Pti——钢丝绳沿卷筒轴向卷绕的节距,单位为毫米(mm);对槽面卷筒,取ptl = p,其中P为卷筒 绳槽节距,单位为臺米(mm);对光面卷筒,取Pd = LOld,其中d为钢丝绳直径,单位为毫 米(mm) O
R.2.2.2钢丝绳绕出处卷筒壁的局部弯曲应力以按式(R.2)计算。
S
ObC = 0.96 X ” , . ........................( R.2 )
式中:
n ——钢丝绳绕岀处卷筒壁局部弯曲应力,单位为牛顿每平方毫米(N∕mm2);
S0——同式(R.1);
DJ ―卷筒直径,对槽面卷筒为钢丝绳槽底直径,单位为毫米(mm),见图R. 1。

图R.1侧板厚度计算示意图
R.2.2.3卷筒壁强度应满足式(R.3)β
5 +心 ≤ [σ~∖ ........................( R.3 )
式中:
、Om---同式(R∙ 1)、式(R.2);
[σ] —材料的许用应力,单位为牛顿每平方毫米(N∕mm2),按式(R.4)计算。
"]=茶........................( R.4)
式中:
農]——同式(R.3);
久 ——材料的屈服点,单位为牛顿每平方毫米(N∕mm2);
Kit——根据机构工作级别选定的系数,按表R.1选取;
K,,―安全系数,取Kn=2.0o
表R l与机构工作级别有关的系数Kd
|
机构工作级别 |
M1~M4 |
M5 |
M6 |
M7 〜M8 |
|
Kd |
1 |
1.12 |
1.25 |
1.40 |
R.2.3卷筒侧板厚度计算
σ⅛ = 1∙44 × (1 — X W) X ɪ ≤ B] ........................(
式中:
儿 —卷筒侧板弯曲应力,单位为牛顿每平方毫米(N∕mm2);
FN —计算轴向力,单位为牛顿(N), 一般取FN=O・1S,S同式(R.1);
[。] ---同式(R.3);
D,n、Dg—卷筒几何尺寸,见图R.1,单位为毫米(mm)0
R.3铸造卷筒
R.3.1卷筒壁厚计算
卷筒壁厚按式(R∙6)或式(R.7)验算。
A〃S“「η 应C
........................(R.6 )
........................(R.7 )
式中:
8 —卷筒壁厚,单位为毫米(mm);
A,, —多层卷绕系数,按表R.2选取;
[匕]——材料许用压应力,单位为牛顿每平方毫米(N∕mm2),对铸铁材料HT2OO,取[∕] = 150 N/mn?;对铸钢材料按式(R.8)计算;
S、Pd---同式(R.l)o
........................(R.8 )
式中:
[匕]----同式(R.6)、式(R. 7);
们,一铸钢材料的抗拉强度,单位为牛顿每平方毫米(N/mm2);
Kni —安全系数,取Kλ1=2.8;
Kd ——同式(R.4),按表R.1选取。
表R.2多层卷绕系数A”
|
卷绕层数 |
1 |
2 |
3 |
4 |
≥5 |
|
多层卷绕系数A“ |
0.65 |
1.15 |
1.45 |
1.55 |
1.60 |
R.3.2卷筒侧板板厚计算
卷筒侧板板厚按式(R.9)或式(R.10)验算。
BU
(R.9 )
(R.10 )
式中:
& —侧板根部板厚(不计圆角部分),单位为毫米(mm);
Bn —综合影响系数,铸铁卷简按表R.3选取,铸钢卷筒按表R.4选取;
S ---同式(R.1);
[七]—铸造材料许用应力,单位为牛顿每平方毫米(N∕mm2)o对铸钢材料,取[∕] = O,],[><] 按式(R.8)计算;对铸铁材料按式(R.11)计算。
(R.11 )
式中:
[匕]---同式(R.9)、式(R.10);
•铸铁材料的抗拉强度,单位为牛顿每平方毫米(N/mm2);
KZt —铸铁卷筒侧板的安全系数,根据机构的工作级别在3〜5中选取。
表R.3铸铁卷筒综合影响系数Bn
|
D/d |
_____________________卷绕层数_____________________ | |||||
|
1 |
2 |
3 |
4 |
5 |
6 | |
|
13 |
0.051 9 |
0.148 4 |
0.306 5 |
0.587 5 |
0.899 1 |
1.289 6 |
|
14 |
0.047 2 |
0.142 3 |
0.291 9 |
0.554 3 |
0.856 3 |
1.228 2 |
|
15 |
0.043 7 |
0.135 5 |
0.278 0 |
0.523 8 |
0.815 5 |
1.158 7 |
|
16 |
0.040 8 |
0.129 0 |
0.264 8 |
0.513 7 |
0.776 7 |
1.093 1 |
|
17 |
0.038 5 |
0.122 9 |
0.252 3 |
0.484 7 |
0.739 7 |
1.041 1 |
|
18 |
0.036 7 |
0.117 0 |
0.240 2 |
0.461 5 |
0.704 5 |
0.991 5 |
|
19 |
0.034 8 |
0.111 2 |
0.228 7 |
0.440 1 |
0.672 7 |
0.947 7 |
|
20 |
0.033 7 |
0.106 0 |
0.218 3 |
0.420 5 |
0.643 6 |
0.907 6 |
|
21 |
0.031 6 |
OJOI 2 |
0.208 8 |
0.402 7 |
0.618 9 |
0.870 7 |
|
22 |
0.030 1 |
0.096 8 |
0.200 0 |
0.386 2 |
0.592 3 |
0.836 6 |
|
23 |
0.028 9 |
0.092 8 |
0.192 0 |
0.372 2 |
0.569 5 |
0.805 0 |
|
24 |
0.027 7 |
0.089 1 |
0.184 5 |
0.357 0 |
0.548 4 |
0.775 7 |
|
25 |
0.026 6 |
0.085 7 |
0.177 7 |
0.344 0 |
0.528 8 |
0.748 5 |
|
26 |
0.025 6 |
0.082 6 |
0.171 3 |
0.331 9 |
0.510 5 |
0.723 0 |
|
27 |
0.024 6 |
0.079 6 |
0.165 3 |
0.320 6 |
0.493 4 |
0.699 2 |
注:表中D为卷筒节径(即第一层钢丝绳中心圆直径)』为钢丝绳公称直径,二者的单位均为毫米(mm)。对于
表中未列出的D/d值和卷绕层数.其所对应的综合系数B八可用插入法求得。
表R∙4铸钢卷筒综合影响系数Bfl
|
D/d |
卷绕层数 | |||||
|
1 |
2 |
3 |
4 |
5 |
6 | |
|
13 |
0.079 4 |
0.284 6 |
0.454 5 |
0.852 3 |
1.253 2 |
1.699 8 |
|
14 |
0.075 6 |
0.271 1 |
0.432 9 |
0.812 8 |
1.193 5 |
1.634 4 |
|
15 |
0.072 0 |
0.258 2 |
0.412 3 |
0.775 1 |
1.136 7 |
1.571 5 |
|
16 |
0.068 6 |
0.245 9 |
0.401 6 |
0.738 2 |
1.082 6 |
1.511 1 |
|
17 |
0.065 3 |
0.234 2 |
0.382 5 |
0.704 0 |
1.033 7 |
1.442 4 |
|
18 |
0.062 2 |
0.223 0 |
0.364 3 |
0.670 5 |
0.987 0 |
1.378 1 |
|
19 |
0.059 0 |
0.211 9 |
0.346 9 |
0.639 4 |
0.942 4 |
1.317 2 |
|
20 |
0.056 1 |
0.201 9 |
0.331 0 |
0.611 1 |
0.901 6 |
1.261 5 |
|
21 |
0.053 5 |
0.192 8 |
0.316 6 |
0.585 1 |
0.864 1 |
1.210 2 |
|
22 |
0.051 1 |
0.184 5 |
0.303 3 |
0.561 2 |
0.829 7 |
1.162 8 |
|
23 |
0.048 9 |
0.176 9 |
0.291 1 |
0.540 8 |
0.797 7 |
1.118 9 |
|
24 |
0.046 9 |
0.169 8 |
0.279 8 |
0.518 8 |
0.768 2 |
1.078 2 |
|
25 |
0.045 1 |
0.163 3 |
0.269 4 |
0.482 2 |
0.715 1 |
1.004 9 |
|
26 |
0.043 4 |
0.157 3 |
0.259 7 |
0.474 0 |
0.703 2 |
0.988 3 |
|
27 |
0.041 8 |
0.151 7 |
0.250 7 |
0.465 8 |
0.691 2 |
0.971 8 |
注:表中。为卷筒节径(即第一层钢丝绳中心圆直径)∙d为钢丝绳公称直径,二者的单位均为毫米(mm)o对于
表中未列出的D/d值和卷绕层数•其所对应的综合系数可用插入法求得。
附录S
(资料性附录)
回转支承选型及其安装螺栓的相关计算
S.1回转支承当置外载荷的计算
回转支承的当量外载荷根据回转支承结构的型式分别按式(Sl)〜式(S.3)计算:
|
a) |
单排及双排球式回转支承: | ||
|
L 4.37M | |||
|
F^=FV+ -^— + 3.44FA … |
....................(S.1 ) | ||
|
b) |
单排交叉滚柱式回转支承: | ||
|
Frg=FV + 2.5FA ・.・・‘ |
....................(S.2 ) | ||
|
C) |
三排柱式回转支承: | ||
|
厂 厂 4.5M | |||
|
FLFV+ k … |
....................(S.3 ) |
式中:
Fg — 回转支承当量外载荷,单位为牛顿(N),同式(125);
FV—作用在回转支承中心的轴向力,单位为牛顿(N);
Fh —作用在回转支承中心的水平力,单位为牛顿(N);
M ——作用在回转支承中心的倾覆力矩,单位为牛顿米(N・m);
Do—滚动体中心圆直径,单位为米(m),对于双排球式及三排柱式回转支承,D。均为下排滚动体 中心圆直径。
S.2回转支承当■静容■的计算
回转支承的当量静容量根据回转支承结构的型式分别按式(S.4)〜式(S.7)计算:
|
a)单排球式: | ||
|
FO = fodlZosιnθ ・・・ |
.....................(S.4 ) | |
|
b)单排交叉滚柱式: | ||
|
7 Fo = fodUo -~s∖nθ … |
.....................(S.5 ) | |
|
C)双排球式: | ||
|
F0=f0dlZ0 … |
.....................(S.6 ) | |
|
d)三排柱式: | ||
|
FO=r<)do∕ OZo |
.....................(S.7 ) |
式中:
FO — 回转支承当量静容量,单位为牛顿(N),同式(125);
do—钢球或滚柱直径,对圆锥形滚柱d。为中径,单位为毫米(mm);
θ —公称接触角,对单排球式0为50°;对交叉滚柱式Θ为45°;
fQ—-静容量系数,由滚道表面硬度决定,按表S.1选取,单位为牛顿每毫米(N/mm);
ZO ——滚柱的接触长度,对单排交叉滚柱式,滚柱为圆柱形取为O.75d。;对三排柱式或采用圆 锥滚柱、腰鼓形滚柱的交叉滚柱式,厶取为0.85赤,单位均为毫米(mm);
Zo—钢球或滚柱个数,对双排球式或三排柱式,Z。为上排滚动体个数,Z。按式(S.8)计算。
πD°l OOo — do da+b
........................(S. 8 )
式中:
DO——上排滚动体中心圆直径。按上式计算的Zo值,对单排球式及双排球式应圆整至较小的整 数;对单排交叉滚柱式及三排柱式应圆整至较小的偶数,单位为米(m)。
b ——隔离块有效隔离宽度,按表S.2选取,单位为毫米(mm)。
do——同式(S.4)〜式(S .7)。
表S.1静容■系数/o
|
滚道表面硬度 HRC |
60 |
59 |
58 |
57 |
56 |
55 |
53 |
51 |
50 |
48 |
46 | |
|
静容量系数 N∕mm2 |
单排及双排球式 |
58 |
53 |
49 |
44 |
40 |
38 |
31 |
25 |
22 |
16 |
10 |
|
交叉滚柱及三排柱式 |
116 |
106 |
98 |
88 |
80 |
76 |
62 |
50 |
44 |
32 |
20 | |
表S.2隔离块有效隔离宽度b
单位为毫米
|
钢球或滚柱直径 |
16 |
20 |
25 |
32 |
40 |
50 |
60 |
|
隔离块有效隔离宽度b |
3 |
3 |
4 |
4 |
5 |
5 |
6 |
S.3安装螺栓的静强度验算和最小拧入深度
S.3.1安装螺栓的静强度验算
回转支承安装螺栓的静强度应满足式(S.9)o
(S.9 )
FSP FPmaX
式中:
FiP ―螺栓应力达到螺栓材料屈服点90%时的最大允许载荷,按表S.3选取,单位为牛顿(N);
FPmaX——螺栓实际最大载荷,单位为牛顿(N),按式(SlO)计算。
(S.10
FPmaX =FI + KfFv
式中:
Fl —螺栓初始预紧力,单位为牛顿(N),按式(S. 11)计算;
Kt —载荷叠加系数,K,取为0.25;
FN—工作载荷,单位为牛顿(N),按式(S.12)计算。
Fl =(0.6 〜0.7)σiAs
(S.11
(S.12
式中:
σ,—螺栓材料的屈服点,单位为牛顿每平方毫米(N∕mm2);
As—螺纹有效截面积,标准螺栓的AS值可按表S.3选取,单位为平方毫米(mm2)O
匚 KiiM FV FN =
式中:
KM——载荷分配系数,对单排球式及双排球式,Kχ= 4.37;对交叉滚柱式及三排柱式,K∣= 4.10; n——回转支承内圏安装螺栓数;
Di——回转支承内圈安装螺栓孔分布圆直径.单位为米(m);
M ----同式(S. 1);
FV----同式(S. 1) o
表S.3螺栓最大允许载荷和预紧力矩(摩擦系数μ = 0.14)
|
螺栓性能等级 |
8.8 |
10.9 |
12.9 | ||||||||
|
螺栓材料屈服点 |
640 N∕mm2 |
900 N/mm |
2 |
1 080 N∕mm2 | |||||||
|
螺纹 规格 |
螺纹有效 截面积 AS mm2 |
螺纹最小 截面积 Adl mm2 |
最大允 许载荷 N |
理论预 紧力矩 N ∙ m |
实际使用 预紧力矩 M, N ∙ m |
最大允 许载荷 F” N |
理论预 紧力矩 N ∙ m |
实际使用 预紧力矩 MP N ∙ m |
最大允 许载荷 FW N |
理论预 紧力矩 M” N ∙ m |
实际使用 預紧力矩 N ∙ m |
|
M5 |
14.2 |
12.7 |
6 350 |
6 |
5.5 |
8 950 |
8.5 |
7.5 |
10 700 |
10 |
9 |
|
M6 |
20.1 |
17.9 |
9 000 |
10 |
9.0 |
12 600 |
14 |
12.5 |
15 100 |
17 |
15 |
|
M8 |
36.6 |
32.8 |
16 500 |
25 |
22.5 |
23 200 |
35 |
• 31∙5 |
27 900 |
41 |
36 |
|
MIO |
58.0 |
53.3 |
26 200 |
49 |
44 |
36 900 |
69 |
62 |
44 300 |
83 |
75 |
|
M12 |
84.3 |
76.2 |
38 300 |
86 |
77.5 |
54 000 |
120 |
110 |
64 500 |
145 |
130 |
|
M14 |
115 |
105 |
52 500 |
135 |
120 |
74 000 |
190 |
170 |
88 500 |
230 |
210 |
|
M16 |
157 |
144 |
73 000 |
210 |
190 |
102 000 |
295 |
265 |
123 000 |
355 |
320 |
|
M18 |
192 |
175 |
88 000 |
290 |
260 |
124 000 |
405 |
365 |
148 000 |
485 |
435 |
|
M20 |
245 |
225 |
114 000 |
410 |
370 |
160 000 |
580 |
520 |
192 000 |
690 |
620 |
|
M22 |
303 |
282 |
141 000 |
550 |
500 |
199 000 |
780 |
700 |
239 000 |
930 |
840 |
|
M24 |
353 |
324 |
164 000 |
710 |
640 |
230 000 |
1 000 |
900 |
276 000 |
1 200 |
1 080 |
|
M27 |
459 |
427 |
215 000 |
1 050 |
950 |
302 000 |
1 500 |
1 350 |
363 000 |
1 800 |
1 620 |
|
M30 |
561 |
519 |
262 000 |
1 450 |
1 300 |
368 000 |
2 000 |
1 800 |
442 000 |
2 400 |
2 160 |
|
M33 |
694 |
647 |
326 000 |
458 000 |
550 000 | ||||||
|
M36 |
817 |
759 |
382 000 |
538 000 |
645 000 | ||||||
|
M39 |
976 |
913 |
460 000 |
646 000 |
776 000 | ||||||
|
M42 |
1 120 |
1 045 |
526 000 |
739 000 |
887 000 | ||||||
|
M45 |
1 300 |
1 224 |
614 000 |
由实验决定 |
863 000 |
由实验决定 |
1 035 000 |
由实验决定 | |||
|
M48 |
1 470 |
1 377 |
692 000 |
973 000 |
1 167 000 | ||||||
|
M52 |
1 760 |
1 652 |
833 000 |
1 171 000 |
1 406 000 | ||||||
|
M56 |
2 030 |
1 905 |
959 000 |
1 349 000 |
1 619 000 | ||||||
|
M60 |
2 360 |
2 227 |
1 120 000 |
1 576 000 |
1 801 000 | ||||||
|
注: |
MP =0.9o | ||||||||||
S.3.2螺栓最小拧入深度
当回转支承与其相连接的上下支座采用螺纹孔安装时,螺栓在上下支座上的最小拧入深度应符合 表S.4的规定。
表S.4上下支座上的最小拧入螺纹深度
|
螺纹性能等级 |
8.8 |
8.8 |
10.9 |
10.9 |
12.9 |
12.9 | |
|
螺纹直径d与螺距P之比(d∕p) |
<9 |
≥9 |
<9 |
29 |
<9 |
K | |
|
上下支座材料的 屈服点久 |
≥28O N∕mm2 |
1.0 J |
1.25J |
1.4J |
1.6d | ||
|
≥500 N∕mm' |
0.9J |
1.0Od |
V2d |
1.4d | |||
|
≥900 N/mm2 |
0.8J |
0.9OJ |
LOd |
1.1J | |||
注:当螺纹规格不大于M3O时取d"V9,大于或等于M33时取J∕p≥90
附录T
(资料性附录)
导线的载流量
导线载流量按式(T.1)计算。
IZ=KKKjIK ........................( T.1 )
式中:
IZ —导线的载流量,单位为安培(A);
Ka——电缆或穿管电线多根并列敷设校正系数,一般对穿钢管电线取0.9,对电缆取0.8;
Kl —环境温度校正系数,常用值见表T.1,K,值也可按式(T.2)计算;
KJ —重复短时工作制的接电持续率校正系数,工作循环时间取为10 min,常用值见表T.2,K∕ 值也可按式(T.3)计算;
九一电线电缆载流量的基准值,由电缆制造商提供,单位为安培(A)。
K'=JBM ........................(T.2)
式中:
L―线芯最高工作温度,单位为摄氏度(°C);
——工作环境温度,单位为摄氏度(笆);
IZ—额定工作环境温度,25 °C(或45 OC)O
6<X)
1 — e一丁
1 — C ~
(T.3 )
Kj =
式中:
JC——接电持续率;
t —导线发热时间常数,由电缆制造商提供,单位为秒(s)。
表T.1导线载流量的温度校正系数KI
|
额定工作 环境温度 |
线芯最高 工作温度 r |
工作环境温度 1C | ||||||||||
|
+ 25 |
÷30 |
+ 35 |
+ 40 |
÷45 |
÷50 |
+ 55 |
+ 60 |
÷65 |
+ 70 |
÷75 | ||
|
÷60 |
1.000 |
0.926 |
0.845 |
0.756 |
0.655 |
0.535 |
— |
— | ||||
|
÷25 |
+ 65 |
1.000 |
0.935 |
0.865 |
0.791 |
0.707 |
0.612 |
0.500 |
— | |||
|
÷70 |
1.000 |
0.943 |
0.882 |
0.816 |
0.745 |
0.667 |
0.577 |
().471 | ||||
|
÷65 |
■ ■ |
1.323 |
1.225 |
1.118 |
1.000 |
0.866 |
0.707 |
— |
—— |
— |
— | |
|
÷70 |
— |
1.265 |
1.183 |
1.095 |
1.000 |
0.894 |
0.775 |
0.632 |
— |
■ ■ |
— | |
|
÷45 |
+ 80 |
—— |
1.195 |
1.134 |
1.069 |
1.000 |
0.926 |
0.845 |
0.756 |
0.655 |
0.535 | |
|
+ 85 |
一 . |
1.173 |
1.118 |
1.061 |
1.000 |
0.935 |
0.866 |
0∙791 |
0.707 |
0.612 |
0.500 | |
表T∙2导线的接电持续率校正系数K,
|
导线型号 |
接电 持续 率% |
线芯般面积 mm' | ||||||||||||
|
1.5 |
2.5 |
4 |
6 |
10 |
16 |
25 |
35 |
50 |
70 |
95 |
120 |
150 | ||
|
BX.BX铜芯 |
25 |
1.313 |
1.417 |
1.477 |
1.550 |
1.614 |
1.678 |
1.754 |
1.790 |
1.834 |
1.849 |
1.876 |
1.880 |
1.898 |
|
橡皮线 |
40 |
1.149 |
1.212 |
1.249 |
1.296 |
1.336 |
1.377 |
1.425 |
1.448 |
1.476 |
1.486 |
1.503 |
1.505 |
1.517 |
|
YC ,YCW, CFXFR 单芯电缆 |
25 |
1.250 |
1.304 |
1.324 |
1.398 |
1.461 |
1.520 |
1.604 |
1.645 |
1.701 |
1.742 |
1.784 |
1.807 |
1.830 |
|
40 |
1.111 |
1.143 |
1.155 |
1.200 |
1.240 |
1.277 |
1.330 |
1.356 |
1.391 |
1.417 |
1.444 |
1.459 |
1.473 | |
|
YC, YCW. CFXFR 三芯电缆 |
25 |
1.490 |
1.531 |
1.590 |
1.640 |
1.696 |
1.750 |
1.808 |
1.803 |
1.838 |
1.865 |
1.887 |
1.902 |
1.912 |
|
40 |
1.258 |
1.284 |
1.321 |
1.353 |
1.388 |
1.422 |
1.460 |
1.479 |
1.479 |
1.495 |
1.510 |
1.519 |
1.526 | |
表T∙3导线载流量的基准
|
线芯 截面积 mm2 |
铜芯电缆 |
重型橡套电缆 |
船用电缆 | |||||||||||
|
BX、BXR 铜芯橡皮线 |
BV、BVR 铜芯塑料线 |
发热时间 常数 S |
YC、YCW 单芯电缆 |
YC、YCW 三芯电缆 |
CF、CFR 单芯电缆 |
CF、CFR 三芯电缆 | ||||||||
|
25 iC时载流量 A |
25 V 时载 流量 A |
发热 时间 常数 S |
25 4C 时载 流量 A |
发热 时间 常数 S |
45 r 时载 流量 A |
发热 时间 常数 S |
45 eC 时载 流量 A |
发热 时间 常数 S | ||||||
|
明敷 |
穿管 |
明敷 |
穿管 |
明敷 |
穿管 | |||||||||
|
1.5 |
27 |
18 |
24 |
17 |
86 |
184 |
— |
— |
— |
— |
20 |
152 |
14 |
307 |
|
2.5 |
35 |
25 |
32 |
24 |
116 |
248 |
37 |
179 |
26 |
347 |
26 |
179 |
19 |
347 |
|
4 |
45 |
33 |
42 |
31 |
138 |
295 |
47 |
190 |
34 |
419 |
35 |
190 |
25 |
419 |
|
6 |
58 |
43 |
55 |
41 |
172 |
368 |
52 |
235 |
43 |
497 |
44 |
235 |
32 |
497 |
|
10 |
185 |
60 |
75 |
57 |
212 |
453 |
75 |
282 |
63 |
613 |
61 |
282 |
44 |
613 |
|
16 |
110 |
77 |
105 |
73 |
267 |
571 |
112 |
336 |
84 |
774 |
81 |
336 |
58 |
774 |
|
25 |
145 |
100 |
138 |
95 |
370 |
791 |
148 |
438 |
115 |
1 050 |
105 |
438 |
77 |
1 050 |
|
35 |
180 |
122 |
170 |
115 |
442 |
945 |
183 |
506 |
142 |
1 020 |
135 |
506 |
94 |
1 020 |
|
50 |
230 |
154 |
215 |
146 |
573 |
1 230 |
226 |
626 |
176 |
1 270 |
165 |
626 |
120 |
1 270 |
|
70 |
285 |
193 |
265 |
183 |
641 |
1 370 |
289 |
746 |
224 |
1 540 |
205 |
746 |
145 |
1 540 |
|
95 |
345 |
235 |
325 |
225 |
797 |
1 770 |
353 |
917 |
273 |
1 870 |
250 |
917 |
180 |
1 870 |
|
120 |
400 |
270 |
375 |
260 |
820 |
1 750 |
415 |
1 040 |
316 |
2 180 |
290 |
1 040 |
205 |
2 180 |
|
150 |
470 |
310 |
430 |
300 |
980 |
2 090 |
— |
— |
— |
— |
335 |
1 200 |
240 |
2 450 |
注1:本表数值以长期匚作制(JelOO%).环境温度+ 25 βC(或+ 45 P )时的载流所为基准值。
注2:表中穿管电线载流域以三根单芯电线穿钢管空气中敷设情况为基准。为简化起见,塔式起重机上所用电
线不论其敷设方式.敷设部位.一般按三根单芯电线穿钢管空气中敷设选用截面,当穿管电线根数超过三 根时,选用的截面适当降低载流量。
附录U (规范性附录) 无线控制装置和控制系统的附加要求
U.1总则
当未经授权而使用的措施被激活时,发射器不应发射信号。
U.2控制装置限制器
U.2.1发射器的激活应显示在发射器上,并不应起动起重机的任何动作。
U.2.2只有当其接收的帧包含正确的地址和正确的命令时,接收器才应输岀运行命令到控制系统。
U.2.3只有在至少接收到一个无任何运行命令但包含起动命令的正确的帧的情况下,起重机开关才应 接通动力(即控制在“on”状态)。
U.2.4任何情况造成起重机停机后(如电源故障、更换电池或丢失信号的情况),为避免意外动作,系统 只能在起重机操作者将控制装置回复至“off” 一段适当的时间后,例如接收到至少一个没有任何运行命 令的帧后,才能输出会引起任何起重机动作的运行命令。
U.2.5每当起重机开关断开时,从接收器输岀的有关起重机动作的所有运行命令应停止。
U.3停机
U.3.1执行停机功能的无线控制系统的部分,是GB/T 16855.1-2008的3.1定义的起重机控制系统 的安全相关部件。
U.3.2当在1.0 S内没有正确接收到有效帧时,控制系统应激发停止所有起重机动作的命令。应对预 知的起重机使用情况进行试验,以确保额外的危险不会导致这个时间值延长。
U.3.3除非接收器监测到控制系统状态与接收器的输出状态相符,否则U.3.2中的停机也应断开起重 机开关。如果接收器监测到控制系统状态与接收器的输出状态相符,则起重机开关断开可最多延迟到 5 min0
U.3.4如果GB 5226. 2-2002的9.2.5.4.2要求的0类的紧急停机功能导致任何额外风险,则停机功能 可为1类。
U.4串行数据通信
U.4.1在无线控制装置运行过程中,帧应重复发送。
U.4.2系统应为除以20的一帧中的总位数,提供一个至少为4的汉明距离,以确保传输可靠性,或者 提供其他可以保证同等级别可靠性的措施,从而使通过一个错误帧的概率小于IO"8 O
U.5多人操作的控制站的使用
U.5.1从一个发射器到另一个发射器的控制转移应是不可能的,除非已通过特别为此目的而设计的有 意动作,使第一台发射器无效。
U.5.2应有措施,使几个成对的发射器/接收器能在传输范围内,没有相互有害干扰地运行。
U.5.3 U.5.2中的措施应予以保护,以防止偶然或意外变化。
U.6电池供电的操作人员控制站
(当发射器的电池电压变低,以致不能保证可靠传输时)在警告和GB 5226.2-2002的9.2.7.6要求 的时间后,发射器应自动进入锁定关闭状态(即接收器停止起重机所有动作,起重机开关断开)。
U.7接收器
接收器应能承受GB/T 2423.56-2006中试验Fd的随机宽带振动试验。
U.8 警示
如预计人员有可能在起重机或起重机部件(例如行走起重机、回转平衡重)附近,且有被困住、撞到 等风险,则至少应有下列标志和警告:
a) 起重机入口处:起重机配有无线控制系统的标志;且
b) 下列任选其一:
D无线控制系统工作时,持续的视觉警告;或
2)起重机动作前,自动听觉和/或视觉警告。
附录V
(资料性咐录) 本标准使用的符号和代号
本标准使用的符号和代号见表v.lo
表V.1本标准使用的符号和代号表
|
符号或代号 |
单位 |
含 义 |
备注 |
|
A |
m2 |
所指构件的特征面积 |
式(10)、式(12) |
|
A |
m2 |
总起升载荷在垂直于风向的平面上的投影面积 |
式(10) |
|
A |
m2 |
剩余起升载荷在垂直于风向的平面上的投影面积 |
式(12) |
|
A |
m2 |
假定的剰余起升载荷投影面积 |
式(13) |
|
A |
mm2 |
螺栓螺杆的截面积 |
式(36) |
|
A |
mm2 |
销轴截面积 |
式(43) |
|
A |
mmz |
构件毛截面面积 |
式(46)、式(1.1)、式(J.1)、 式(J.2) |
|
AOl %A 02 |
mm2 |
分别为起重:臂L、曲臂段的截面积 |
式(G.17) |
|
AI、A 2 |
mm2 |
分别为拉索1和拉索2的截面积 |
式(G.17) |
|
A, |
mz |
格构式结构件的轮廓面积 |
式(B.4) |
|
A1 (.A∖ 〜A3) |
mm2 |
杆,的截面积 |
式(G.3)、式(G.4) |
|
A1(A1-A4) |
mm2 |
杆,的截面积,且A】 =A2,A3= A, |
式(G.5)〜式(G.6) |
|
Al(Ai-A4) |
mmz |
杆i的截面积,SA1= A..A2= A3 |
式(G.7)~ 式(G.8) |
|
A,____________ |
mm2 |
所验算截面的净面积 |
式(29)、式(30) |
|
∑A, i |
9 ΠΓ |
单根构件及其节点板在格构式结构件平面上的投影面积 的总和 |
式(B.4) |
|
A, |
mm2 |
螺栓有效计算面积 |
式(39) |
|
A, |
mm2 |
高强度螺栓有效截面积 |
式⑷) |
|
An |
― |
多层卷绕系数 |
式(R.6)、式(RR) |
|
As |
mm2 |
螺纹有效截面积 |
式(S. 11) |
|
a |
m |
合力作用点至基础底面最大压力边缘的距离 |
式(26) |
|
a |
— |
钢丝绳滑轮组的倍率 |
式(67)、式(115) |
|
a、b、c、d |
mm |
几何尺寸 |
式(G.5)〜式(G.6) |
|
a J)、c、d |
mm |
几何尺寸 |
式(G.7)〜式(G.8) |
|
Qi、“2、b、Cl , C2、d |
mm |
几何尺寸 |
式(G.3)〜式(G.4) |
|
|
m∕s2 |
起升机构的起动平均加速度 |
式(75) |
|
Qy |
m∕s2 |
动平均加速度 |
式(85) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
m∕s2 |
制动平均减速度 |
式(78) | |
|
饥 |
— |
综合影响系数 |
式(R.9)、式(R.10) |
|
b |
m |
基础底面边长 |
式(23) |
|
b |
mm |
几何尺寸 |
式(32) |
|
b |
mm |
受压翼缘的宽度 |
式(1.3) |
|
b |
mm |
隔离块有效隔离宽度 |
式(S.8) |
|
hr |
mm |
尺寸 |
式(33) |
|
C |
■— |
幕指数 |
式⑸ |
|
C |
— |
所指构件的空气动力系数 |
式(10)、式(12) |
|
C |
总起升载荷沿风向的空气动力系数 |
式(10) | |
|
C |
—∙ |
剩余起升载荷沿风向的空气动力系数 |
式(12) |
|
C |
威勒曲线斜率 |
式(103)、式(104) | |
|
C |
mm∕N7 |
钢丝绳选择系数 |
式(116) |
|
C |
— |
惯性增加率 |
式(0.12) |
|
Co |
— |
无限长直的等截面构件的空气动力系数 |
式(B.1) |
|
Car、Co.V |
■ ■ |
端部弯矩不等的折减系数 |
式(J.1)、式(J.2) |
|
ɑwʃ、C Hy |
横向载荷弯矩系数,可按式(J.4)计算 |
式(J.1)、式(J.2) | |
|
C/ |
・•・・ |
考虑车轮轮缘与轨顶侧面摩擦或牵引供电电缆及集电器 摩擦等的附加摩擦阻力系数 |
式(80) |
|
Cl |
大小为PQ的净载荷的工•作循环数 |
式(1) | |
|
Ck |
— |
与电动机类型有关的修正系数 |
式(0.1) |
|
CT |
塔式起重机的总工•作循环数 |
式⑴ | |
|
CS |
mm∕N |
在所计算的平面内附着支撑的柔度 |
式(G.2) |
|
C |
mm |
几何尺寸 |
式(32) |
|
D |
m |
按最外层钢丝绳中心计算的卷筒卷绕直径 |
式(67) |
|
D |
mm |
车轮踏面直径 |
式(80)、式(83) |
|
D |
mm |
油缸内腔直径 |
式(92) |
|
D |
mm |
滑轮和卷筒(第一层)钢丝绳中心的卷绕直径 |
式(119) |
|
DO |
m |
滚动体中心圆直径 |
式(S.1)〜式(S.3) |
|
Do |
m |
上排滚动体中心圆直径 |
式(S.8) |
|
DI |
m |
回转支承内圈安装螺栓孔分布圆直径 |
式(S.12) |
|
Dd |
mm |
卷筒直径 |
式(R.2) |
|
mm |
卷筒几何尺寸 |
式(R.5) | |
|
d |
mm |
螺栓公称直径 |
式(37) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
d |
mm |
销轴直径 |
式(44) |
|
d |
mm |
车轮轴径 |
式(80) |
|
d |
Cm |
轴外径 |
式(95) |
|
d |
mm |
钢丝绳公称直径 |
式(119) |
|
d |
m |
构件的特征尺寸 |
式(B.2)、式(B.5) |
|
Cln |
mm |
销孔直径 |
式(32) |
|
L |
mm |
螺栓孔直径 |
式(37) |
|
d0 |
mm |
钢球或滚柱直径,对圆锥形滚柱为中径 |
式(S.4)〜式(S.7) |
|
小 |
Cm |
空心轴的内直径,当为实心轴时,dι=0 |
式(95) |
|
df |
每小时全起动次数 |
式(0.4)、⅛(O.10) | |
|
CJi |
每小时点动或不完全起动次数 |
式(0.4)、式(0.10) | |
|
d ∏tin |
mm |
钢丝绳的最小直径 |
式(116) |
|
E |
N∕mm2 |
钢材的弹性模量 |
式(53) |
|
N/mmz |
分别为拉索1和拉索2材料的弾性模虽 |
式(G.17) | |
|
e |
m |
偏心距(合力作用点至基础中心的距离) |
式(27) |
|
e |
mm |
起重臂根部被接点到起重臂截面形心连线的垂直距离 |
式(G.18)〜式(G.2】) |
|
et) |
mm |
起重皆根部铉接点到起重臂截面形心连线的垂直距离 |
式(G.13)〜式(G.16) |
|
e∖ |
mm |
几何尺寸 |
式(37) |
|
e↑、已 |
mm |
分别为拉索1和拉索2在起重臂上的固定点到起重臂蔽 面形心连线的垂直距离 |
式(G.13)〜式(G.16) |
|
e2 |
mm |
几何尺寸 |
式(38) |
|
F |
N |
作用于螺栓螺杆截面的剪力 |
式(36) |
|
F |
N |
作用于螺栓的剪力 |
式(37) |
|
F |
N |
作用于螺栓的拉力 |
式(39) |
|
F |
N |
作用于销轴截面的乾力 |
式(43) |
|
F |
N |
作用于销轴连接的外力 |
式(44) |
|
F。 |
kN |
钢丝绳整绳最小破断拉力 |
式(118) |
|
F<> |
N |
回转支承当窟静容信 |
式(125) |
|
Fl |
N |
高强度螺栓的预紧力 |
式(40)、式(42) |
|
F1 |
N |
螺栓初始预紧力 |
式(S.10) |
|
F. .F2 |
N |
拉(压)力 |
式(45) |
|
F. .F2 |
N |
起重臂拉索力(内力) |
式(G.1DJG.12) |
|
Ffr |
N |
油缸的临界载荷 |
式(P.1) |
|
N |
回转支承当量外载荷 |
式(125) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
Fh |
N |
作用在冋转支承中心的水平力 |
式(S.1)、式(S.2) |
|
F,、F/ |
初始(i)驱动力和最终(/)驱动力 |
式(9) | |
|
F, |
N |
塔式起重机作用于基础顶的垂直载荷 |
式(23) |
|
∑Fmax |
N |
包括臂架及平衡系统的自重载荷、总起升载荷、风载荷 Pw2、由起重绳正常偏角S计算的水平力及臂架系统各转 动钗点的摩擦力在变幅动滑轮组上的分力和,在各变幅位 置时所有值中取其最大变幅力 |
式(N.4) |
|
FN |
N |
单个高强度螺栓在螺杆轴向所承受的拉力 |
式(42) |
|
FN |
N |
油缸的轴向载荷 |
式(P.1) |
|
FN |
N |
计算轴向力 |
式(R.5) |
|
FN |
N |
工作载荷 |
式(S.10) |
|
FPmaX |
N |
螺栓实际最大载荷 |
式(S.9) |
|
F,p |
N |
螺栓应力达到螺栓材料屈服点90%时的最大允许载荷 |
式(S.9) |
|
FV |
N |
作用在回转支承中心的轴向力 |
式(S.1)〜式(S.3) |
|
FM |
N |
塔式起重机起重臂与基础底面某一边平行时,作用于基础 顶面的水平载荷值 |
式(24)、式(25) |
|
IimF” |
N |
单个高强度螺栓的极限剪切承载能力 |
式(42) |
|
IimFN |
N |
单个高强度螺栓在螺杆轴向所能承受的极限拉力 |
式(41) |
|
IimF,, |
N |
单个高强度螺栓的极限承载能力 |
式(40) |
|
f |
每小时电气制动次数 |
式(().4)、式(().10) | |
|
/o |
N/mm |
静容量系数 |
式(S.5)〜式(S.7) |
|
fa |
N∕m2 |
修正后的地基承载力特征值 |
式(23) |
|
fκ |
mm |
车轮沿轨道的滚动摩擦力臂 |
式(80) |
|
G |
— |
稳态负载平均系数 |
式(L.6)、(L.7) |
|
Gh |
N |
基础及其上土的自重载荷(重力) |
式(23) |
|
g |
m∕s2 |
重力加速度 |
式(73)、式(81) |
|
fζ / |
折算系数 |
式(0.10) | |
|
H |
■ ■ |
系数 |
式(N.1).式(N.3) |
|
h |
m |
离地面或海面的高度 |
式(15) |
|
h |
m |
基础的厚度 |
式(24)、式(25) |
|
h |
mm |
起重臂根部连接处至直接支撑整个塔身的平面的垂直 距离 |
式(66) |
|
h |
— |
卷筒、滑轮和平衡滑轮的卷绕直径与钢丝绳直径之比值 |
式(119) |
|
h |
mm |
构件截面的全高 |
式(1.1) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
h |
mm |
槽钢构件截面的全高 |
式(1.3) |
|
I |
A |
最大工作电流 |
式(128) |
|
∕lJ2 |
mmj |
分别为起重臂ZI、/2臂段的截面惯性矩 |
式(G.13)、式(G.14) |
|
IU |
mm, |
活塞杆横截面惯性矩 |
式(P.2) |
|
mm, |
塔身/。段截面按某轴的抗弯截面惯性矩 |
式(G.2) | |
|
II) |
A |
电动机的起动电流 |
式(0.1) |
|
当虽惯性矩 |
式(J.11) | ||
|
IK________________ |
A |
电线电缆载流员的基准值 |
式(130)、式(T.1) |
|
/ *τ、Ly |
起重臂分别对虚轴h*和Vy的折算截面惯性矩 |
式(G.10) | |
|
ʃ ΠMX |
A |
塔式起重机最大工作电流 |
式(129) |
|
IN |
A |
电动机的额定工作电流 |
式(0.1) |
|
INl、Lw、I.N3 |
A |
三个机构电动机在额定载荷下的额定T∙作电流 |
式(129) |
|
IX |
A |
导线载流量 |
式(130) |
|
KJy |
mml |
构件对通过形心的强轴&轴)或弱轴3轴)的毛截面惯 性矩 |
式(48)、式(66) |
|
LJy |
起重臂分别对虚轴Li和W 的截面惯性矩 |
式(G.10) | |
|
IZ |
A |
导线的载流量 |
式(T.1) |
|
. I |
— |
由电动机轴到卷筒轴的总传动比 |
式(67) |
|
i |
由制动器轴到卷筒轴的总传动比 |
式(71) | |
|
. I |
........ |
由电动机轴到车轮的机构总传动比 |
式(83) |
|
i |
一 ■ |
由制动器轴到车轮的机构总传动比 |
式(86) |
|
i |
— |
从制动器轴到回转支承装置的回转机构总传动比 |
式(89) |
|
. I |
— |
冋转机构总传动比 |
式(N .3)、式(().15) |
|
J |
kg ・ m2 |
所有运动质量换算到电动机轴上的总转动惯量 |
式(0.2) |
|
ΣJ |
kg ∙ m2 |
机构对电动机轴的总惯员.即包含直线运动质虽和传动机 构的全部质量的慣性折算到电动机轴上的转动惯fit和电 动机轴上自身的转动惯址之和 |
式(N .2)、式(0.19) |
|
JC |
接电持续率 |
式(T.3) | |
|
Jl |
kg ∙ m2 |
电动机转子的传动惯址 |
式(72) |
|
J2 |
kg ∙ m2 |
电动机轴上制动轮和联轴器的传动慣虽 |
式(72) |
|
T |
kg ∙ m2 |
作起升运动的物品的惯量折算到电动机轴上的传动惯址 |
式(72) |
|
Jk |
kg ∙ m2 |
作平移运动的全部质量的惯址折算到电动机轴上的转动 惯量 |
式(82) |
|
JJ |
kg ∙ m2 |
电动机转动惯量 |
式(0.12) |
|
J, |
kg ・ m2 |
电动机以外.运动质量折算到电动机轴上的转动惯址 |
式(0.12) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
. J |
机械零件T∙作级别的组别号 |
式(107)、式(108) | |
|
K |
— |
功率修正系数 |
式(126) |
|
K |
— |
功率最大机构电动机的启动电流倍数 |
式(129) |
|
K Ol、K(J2 |
N/mm |
分别为起重臂Z1J2的轴向刚度 |
式(G.13)、式(G.14)、式 (G.17) |
|
KZ |
— |
系数 |
式(0.6) |
|
K” |
铸铁卷筒侧板的安全系数 |
式(R.11) | |
|
k |
— |
其他传动件的转动惯址折算到电动机轴上的影响系数 |
式(72) |
|
k |
系数,与T作级别、联轴器的重要性及所连接的轴有关 |
式(122) | |
|
k |
—— |
电磁离合器的安全系数 |
式(124) |
|
k |
―一 |
截面对称系数____________________ |
式(1.1) |
|
k |
— |
系数 |
式(J.4) |
|
k, |
— |
钢丝绳最小破断拉力系数 |
式(117) |
|
k, |
— |
支撑条件系数 |
式(P.2) |
|
L |
m |
导线有效长度 |
式(128) |
|
La |
mm _一 — _ 一 __ , |
油缸行程 ----- _ — ____ _一 ― _____ 一 _ __ __ _ _ |
式(92) |
|
I |
m |
轴的支点间距 |
式(95) |
|
I |
m |
构件长度_______________________ |
式(B.3) |
|
I |
mm |
构件的实际几何长度 |
式(G.1) |
|
I |
mm |
受压翼缘的计算(自由)长度________________ |
式(1.3) |
|
I |
mm |
油缸计算长度 |
式(P.2) |
|
mm |
附着点之间或附着点与基础或附着点与底座之间的距离 |
式(G.2) | |
|
Zo |
mm |
滚柱的接触长度 |
式(S.5)、式(S.7) |
|
11—3、alI、 仪Z、払 |
mm |
各相关尺寸 |
式(G.13)〜式(G.17) |
|
I!、/2」3、al I、 Sg |
mm |
各相关尺寸,其中Z1J2J3为拉索1和拉索2的延长线与 起重臂截面形心连线相交后得到的尺寸 |
式(G.18)〜式(G.21) |
|
Ia |
m |
构件的空气动力长度 |
式(B.2) |
|
It |
mm |
构件的计算K度 |
式(47) |
|
It |
mm |
受压构件的计算长度 |
式(G.1) |
|
Zl(Zi-Z3) |
mm |
杆i的长度 |
式(G.3)〜式(G.4) |
|
mm |
杆i的长度,且Z1=Z2 J3=Z1 |
式(G.5)〜式(G.6) | |
|
Z4(Zi-Z4) |
mm |
杆i的长度,且Ii=M ,I2=I3 |
式(G.7)〜式(G.8) |
|
It |
m |
变幅动滑轮组在变幅位置i处的行程 |
式(0.17) |
|
符号或代号 |
单位 |
含 义 |
备注_____ |
|
Λ + i |
m |
变幅动滑轮組在变幅位置∣÷1处的行程 |
式(().17) |
|
M |
N ∙ m |
卷筒的转矩 |
式(L.3) |
|
M |
N ∙ m |
作用在回转支承中心的倾覆力矩 |
式(S.1)〜式(S.3) |
|
N ∙ mm |
构件的端部弯矩 |
式(J.8) | |
|
JvfOX M Oy |
N ∙ mm |
构件的端部弯矩 |
式(J.1)、式(J.2) |
|
MO /M”、 MC∕M°, |
结构件两端的端部弯矩比值 |
式(J.3) | |
|
∙∙∙ M n |
N ∙ m |
为包括电动机转动及移动质量全部惯性力在内的各个阶 段的转矩值 |
式(L.8) |
|
MU |
N ∙ m |
等效坡道阻力矩 |
式(87)、式(0.15) |
|
MU |
N ∙ m |
电动机平均加速转矩 |
式(0.4) |
|
M” |
N ∙ m |
由钢丝绳正常偏摆角计算的冋转水平阻力矩 |
式(N.3) |
|
MU mtx |
N ∙ m |
回转最大坡道阻力矩 |
式(N.3) |
|
MC |
N ∙ m |
换算到电动机轴上的等效冋转力矩 |
式(88) |
|
Md |
N ∙ m |
起动时(转速W=O时)电动机轴上具有的转矩 |
式(68) |
|
M., |
N ∙ m |
满载、上坡、迎风时作用于电动机轴上的稳态运行阻力矩 |
式(82) |
|
Mdtt |
N ∙ m |
电动机平均起动转矩 |
式(72) |
|
N ∙ m |
等效回转稳态阻力矩 |
式(87)、式(L.4) | |
|
_ MH |
N ∙ mm |
横向载荷在构件中引起的弯矩 |
式(J.8) |
|
MHZ、MHy |
N ∙ mm |
由横向载荷在构件中引起的最大弯矩 |
式(J.1)、式(J.2) |
|
M;_________ |
N ∙ m |
稳态下降额定载荷时电动机制动轴上的转矩 |
式(76) |
|
Mt |
N ∙ m |
塔式起重机起重臂与基础底面某一边平行时,作用于基础 顶面的力矩值 |
式(24)、式(25) |
|
ML |
N ∙ m |
联轴器的计算转矩 |
式(121) |
|
ML |
N ∙ m |
电磁离合器的计算转矩 |
式(123) |
|
LMLJ |
N ∙ m |
联轴器的许用转矩 |
式(121) |
|
[M1.] |
N ∙ m |
电磁离合器规格参数表中给岀的额定转矩 |
式(123) |
|
Ml |
N ∙ m |
需要联轴器传递的转矩 |
式(122) |
|
ML |
N ∙ m |
电磁离合器的计算基本载荷 |
式(124) |
|
ME |
N ∙ m |
回转摩擦阻力矩,主要是回转支承装置的摩擦阻力矩 |
式(87)、式(N.3)、式((). 15) |
|
Mttt |
N ∙ m |
不考虑起制动阶段的电动机平均阻转矩 |
式(().3)、式(0.5) |
|
Mmrd |
N ∙ m |
等效平均阻力矩 |
式(L.8) |
|
MN |
N ∙ m |
稳态起升总起升载荷的转矩 |
式(67)、式(68) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
N ∙ m |
电动机的额定转矩 |
式(74) | |
|
Mr |
N ∙ m |
电动机静阻力转矩 |
式(0.8) |
|
Mrr |
N ∙ m |
最不利工作循环的等效平均阻力转矩 |
式(0.6) |
|
Mfi |
N・m |
丁.作时间厶内相应的电动机阻力转矩,包括启、制动转矩 |
式(0.7) |
|
MW |
N ∙ m |
正常T作状态下的等效风阻力矩 |
式(87) |
|
MW |
N ∙ m |
由PW3引起的最大风阻力矩 |
式(N.3) |
|
MW |
N ∙ m |
由PW3引起的风阻力矩 |
式(0.15) |
|
Mr |
N ∙ mm |
绕构件强轴(■!•轴)作用的最大弯矩 |
式(57) |
|
Mr、M、. |
N ∙ mm |
构件计算截面上对强轴α轴)和对弱轴3轴)的弯矩 |
式(52)、式(58) |
|
MZ |
N ∙ m |
起升机构制动器轴上所需的制动转矩 |
式(71) |
|
MZ |
N ∙ m |
运行机构制动转矩 |
式(86) |
|
MZ |
N ∙ m |
回转机构的制动转矩 |
式(88) |
|
m |
kg |
塔式起重机的总起升质量 |
式(81) |
|
m |
— |
受压翼缘对弱轴M轴)的惯性矩与全截面对弱轴危轴)的 惯性矩之比 |
式(1.1) |
|
m |
运行机构电动机台数 |
式(L.2) | |
|
m |
电动机台数 |
式(N. 1)〜式(N.4)、式 (().14)、式(().15)、式((). 17)、式(0.19) | |
|
t m |
电动机台数 |
式(82) | |
|
ma |
— |
坡道阻力系数 |
式(N.2)、式(().14)、式 (0.19) |
|
w/f |
kg |
起升载荷质量 |
式(8) |
|
kg |
总起升载荷的质虽 |
式(13) | |
|
∆W H |
kg |
在空中突然卸除的部分起升载荷质员(通常为有效起重量) |
式(8) |
|
∆W∏ |
kg |
非丁•作状态要求从总起升载荷中卸除的起升载荷(通常为 冇效起升载荷或净起升载荷)的质虽 |
式(14) |
|
m |
kg |
塔式起敢机或小乍的质量 |
式(81) |
|
m |
制动器台数 |
式(86) | |
|
N |
N |
作用于连接处的轴向力 |
式(29)、式(31)〜式(33) |
|
N |
、 |
构件的轴向压力 |
式(46)、式(J.1) |
|
N |
N |
塔身与臂架连接处以上塔身顶部所冇垂直力(包括塔身n 更在此处的折算力)的合力 |
式(65) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
N |
作用于连接处的计算轴向力 |
式(30) | |
|
N2 |
拉索力巳为单位力时引起的拉索力已之内力 |
式(G.12) | |
|
-VE |
N |
欧拉临界载荷NK,和N %中的较小者 |
式(65) |
|
NE |
分为与CHt XHy相对应的Ne,、N& |
式(J.4) | |
|
N &、NEy |
N |
分别为构件对强轴(∙r轴)和对弱轴M轴)的名义欧拉临 界力 |
式(52) |
|
NP |
载荷(吊重)P,和自重q,引起的拉索力F"之内力 |
式(G.12) | |
|
n |
结构件一端或对称连接一边的高强度螺栓数 |
式⑶) | |
|
n |
r/min |
电动机额定转速 |
式(72)、式(N.2)、式 (N.3)、式(0.19) |
|
n |
油紅数目 |
式(92) | |
|
n |
— |
钢丝绳最小安全系数 |
式(117) |
|
n |
r/min |
卷筒的转速 |
式(L.3) |
|
n |
r/min |
回转速度 |
式(L.4) |
|
n |
r/ min |
电动机转速 |
式(L.9) |
|
n |
回转支承内圈安装螺栓数 |
式(S.12) | |
|
/ H |
r/min |
满载(额定载荷)下降且制动器投入有效制动转矩时的电 动机转速 |
式(76) |
|
所验算截面处(连接接头的最外列螺栓处)的高强度螺 栓数 |
式⑶) | ||
|
nb |
— |
与钢材的抗拉强度及载荷组合相对应的安全系数 |
式(94) |
|
r/min |
轴的临界转速 |
式(95) | |
|
结构件或机械零件中大小为/的应力的循环数 |
式(5) | ||
|
心 |
r/min |
电动机在P,”时的转速 |
式(0.1) |
|
心 |
r/mɪn |
电动机转速 |
式(0.6) |
|
“ Π⅞AX |
r/min |
轴的实际最大转速 |
式(95) |
|
丄 |
—— |
肆指数 |
式(20) |
|
Mr |
... |
疲劳安全系数 |
式(109)〜式(IlI) |
|
— |
与钢材的屈服点及载荷组合相对应的安全系数 |
式(93) | |
|
结构件或机械零件的总应力循环数 |
式(5) | ||
|
Pl、P"3 |
N |
载荷(吊重) |
式(G.16) |
|
PU |
N |
坡道阻力 |
式(79) |
|
Pa |
N |
行走轨道坡度等引起的变幅阻力 |
式(90) |
|
P. |
N |
变幅过程中臂架系统相对冋转中心线的径向慣性力引起 的变幅阻力______________________ |
式(90) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
PI) |
N |
塔式起重机运行停机减速惯性力 |
式(21) |
|
Pf |
N |
臂架系统在塔式起重机冋转时的离心力引起的变幅阻力 |
式(90) |
|
Pr |
kW |
回转机构电动机的等效网转功率 |
式(L.4) |
|
Pr |
kW |
动臂变幅机构电动机的等效变幅功率 |
式(L.5) |
|
Pf___________ |
N |
塔式起重机运行摩擦阻力 |
式⑵) |
|
PI |
N |
非工作状态下塔式起重机的运行摩擦阻力 |
式(22) |
|
PJ |
N |
臂架铉轴等关节中的摩擦力和补偿滑轮蛆的效率造成的 变幅阻力 |
式(90) |
|
PIJ |
N |
动臂变幅机构等效阻力 |
式(91) |
|
Pli |
N |
臂架从位置i到位置∕÷1幅度区段上两个相邻计算位置 的变幅阻力的平均值 |
式(91) |
|
Pli |
N |
在第i个变幅位置,由包括臂架及平衡系统自重、总起升 载荷、风载荷PW3、由起重绳偏摆角2计算的水平力及臂 架系统各转动钗点的摩擦力等产生的在变幅动滑轮组上 的分力之和 |
式(0.16) |
|
Pl |
N |
机构在工作期限内承受的各个不同载荷的大小 |
式(3) |
|
巳______ |
、 |
稳态运行阻力 |
式(79) |
|
PI |
N |
臂架系统自重未能完全平衡引起的变幅阻力 |
式(90) |
|
Pm |
N |
运行摩擦阻力 |
式(79) |
|
Pnt |
kW |
一个循环期内恒速T作时电动机的平均功率 |
式(0.1) |
|
P: |
N ∙ m |
不考虑轮缘与轨道侧面附加摩擦的摩擦阻力 |
式(86) |
|
Pmm |
N |
机构承受的最大载荷 |
式(3) |
|
P med |
kW |
等效平均功率 |
式(L.9) |
|
Pv |
kW |
未修正的所需电动机的功率 |
式(126) |
|
PN |
kW |
电动机的稳态起升功率 |
式(L.1) |
|
PN |
kW |
电动机的穏态运行功率 |
式(L.2) |
|
PN |
kW |
电动机的稳态变幅功率 |
式(L.3) |
|
PN |
kW |
电动机的额定功率 |
式(N. 1)〜式(N.4)、式 (0.6) |
|
PN |
kW |
起升机构电动机的静功率 |
式(0.18) |
|
P; |
kW |
根据环境温度和海拔修正后用来选用电动机的功率 |
式(126) |
|
P” |
kW |
所选电动机在相应的CZ值和实际接电持续率JC值下的 功率 |
式(L.6)、式(1,7) |
|
P “ |
、 |
变幅时吊运物品非水平位移所引起的变幅阻力 |
式(90) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
PQ |
N |
总起升载荷.即总起重虽的車力,包括额定起重量、吊具及 部分悬垂的钢丝绳等质蛍的重力 |
式(67) |
|
PQ |
、 |
塔式起重机在预期寿命期限内起升的各个不同的净载荷 的大小 |
式(1) |
|
P Q ma* |
N |
塔式起重机的最大净载荷(额定起重Ift的重力) |
式(1) |
|
PS |
N |
偏斜运行时的水平侧向载荷 |
式(C.1) |
|
PS |
kW |
稳态平均功率 |
式(().11)、式(0.14)、式 (0.15) |
|
PS |
kW |
运行机构电动机发热计算功率 |
式(0.19) |
|
PsI |
kW |
连续工作制(Sl)时电动机的额定功率 |
式(0.1) |
|
PM |
N |
作用在吊运物品上的风载荷、塔式起重机冋转时吊运物品 的离心力以及变幅、回转、运行起动或制动时在吊运物品 上造成的水平惯性力等引起的起升滑轮组对铅垂线的偏 角Q造成的变幅阻力 |
式(90) |
|
PW |
N |
作用在臂架系统上的风载荷引起的变幅阻力 |
式(90) |
|
PWI |
N |
验算丁.作状态下塔式起重机结构时,垂直作用在所指构件 纵轴线上的风载荷 |
式(10) |
|
PWI |
N |
工作状态沿风向作用在总起升载荷上的风载荷 |
式(10) |
|
P W2 |
N |
验算工作状态下起动駆动力时,垂直作用在所指构件纵轴 线上的风载荷 |
式(10)、式(N.2) |
|
Fw3 |
N |
验算工作状态下控制运动的駆动力时,垂直作用在所指构 件纵轴线上的风载荷 |
式(10) |
|
PWN |
N |
非工作状态垂直作用在所指构件纵轴线上的风载荷 |
式(⑵ |
|
PWN |
N |
沿风向作用在剩余起升载荷上的风载荷 |
式(12) |
|
PZ |
N |
动臂变幅机构的变幅阻力 |
式(90) |
|
PZX |
N |
运行机构制动器在车轮踏面上产生的制动力 |
式(21) |
|
P 7.2 |
N |
制动器、夹轨器等装置沿轨道方向产生的抗风防滑阻力 |
式(22) |
|
% |
N |
自重载荷沿坡道方向产生的滑行力 |
式(21) |
|
Pg |
N |
额定起升载荷沿坡道方向产生的滑行力 |
式⑵) |
|
P OQI |
N |
剩余起升载荷沿坡度产生的滑行力 |
式(22) |
|
P∑ |
N |
运动部分所有质扯的璽力,包括吊运物品和塔式起重机或 小车等质址的重力 |
式(80 )、式(().14 )、 式(0.19) |
|
Pξ |
— |
电动机断续定额与连续定额的损耗比 |
式(0.20) |
|
∑P |
N |
承受侧向载荷一侧的端梁上与有效轴距有关的相应车轮 经常岀现的最大轮压之和 |
式(C.1)、式(N.2) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
Pl |
mm |
几何尺寸 |
式(38) |
|
Pi |
mm |
几何尺寸 |
式(38) |
|
Pd |
mm |
钢丝绳沿卷筒轴向卷绕的节距 |
式(R.1) |
|
Pk |
N∕m2 |
基础底面处的平均压应力值 |
式(23) |
|
Pkmλk |
Wm2 |
基础底面边缘的最大压应力值 |
式(24) |
|
N∕m2 |
基础底面边缘的最小压应力值 |
式(25) | |
|
Pn |
N∕m2 |
非工作状态计算风速为%时的计算风压 |
式(12)、式(15) |
|
P “(h) |
N∕m- |
髙度h处的非T作状态计算风压 |
式(17) |
|
Pu- |
N∕m2 |
T.作状态计算风速为时的计算风压 |
式(10)、式(11) |
|
(1\、如、心 |
N/mm |
起更臂单位长度r∣重 |
式(G.16) |
|
R |
R = (Ql ÷Λ∕2)sinft + C∣ cosβ3 |
式(G.3)〜式(G.4) | |
|
Rr |
—— |
雷诺数 |
式(B.5) |
|
Rn |
— |
电动机运行后的温升与连续定额时温升的比率 |
式(0.20) |
|
R* |
■ |
运行后的温升与断续定额时温升的比率 |
式(0.20) |
|
r |
mm |
滑轮、卷筒的绳槽半径 |
式(120) |
|
r(rʃ Xry ,rʃJr) |
— |
应力循环特性值 |
式(59) |
|
r,、弓 |
mm |
构件毛截面对通过形心的强轴徐轴)或弱轴(y轴)的回转 半径 |
式(47) |
|
S |
、 |
钢丝绳最大工作静拉力 |
式(116)、式(R.1) |
|
S |
mnr |
导线截面 |
式(128) |
|
■ S____________ |
駆动力引起的载荷效应 |
式(9) | |
|
∆S |
由駆动力变化β ∆F(∆F= Fi-Fj)引起的载荷效应变 化量 |
式(9) | |
|
Sl血 |
mm |
分别为拉索1和拉索2的长度 |
式(G.17) |
|
Sj、Sf |
由F,和F,引起的初始(? )载荷效应和最终(/)载荷效应 |
式(9) | |
|
ʌɪ E |
mm |
被连接件之间的间隙 |
式(45) |
|
T |
βC |
起重机结构的工作环境温度 |
式(D.6)、式(D.7) |
|
T |
S |
一个工.作循环的总时间 |
式(0.1) |
|
t |
mm |
几何尺寸_______________________ |
式(32) |
|
1 |
mm |
螺栓挤压面厚度(不含冇螺纹部分) |
式(37) |
|
1 |
mm |
销轴挤压面厚度 |
式(44) |
|
t |
mm |
构件材料厚度 |
式(D.4)、式(D.5) |
|
t |
S |
导线发热时间常数 |
式(T.3) |
|
f O |
IC |
T.作环境温度 |
式(T.2) |
|
符号或代号 |
单位 |
含 义______________ |
备注 |
|
t∖ |
9C |
线芯最高工作温度 |
式(T.2) |
|
f 1 宀 “3 ♦ ∙∙∙ ∙/Ir |
发生不同转炬的时间段,静止时间不计入 |
式(L.8) | |
|
,I ∙3 |
mm |
妇,3 = max(∕ i ♦),,】、,3为被连接件的厚度 |
式(45) |
|
M |
eC |
额定工作环境温度 |
式(T.2) |
|
M,3 |
mm |
f2,3 = max(fz・),,z、,3为被连接件的厚度 |
式(45) |
|
t b |
mm |
构件受压翼缘厚度 |
式(1.1) |
|
Ib |
mm |
构件受压翼缘的平均厚度 |
式(1.3) |
|
h: |
S |
一个循环期内起动制动的等效时间 |
式(0.1) |
|
t. |
h |
机构承受的大小为P,的载荷的持续时间 |
式(3) |
|
L |
S |
I,的作用时间 |
式(91) |
|
C |
S |
机构工作循环中各运转时间,不包括停机时间 |
式(0.7) |
|
C |
S |
每一变幅位置间隔所需要时间 |
式(0.16) |
|
Z |
S |
一个循环期内恒速工作的时间 |
式(0.1) |
|
tτ |
h |
(机构承受的)所有不同载倚作用的总持续时间 |
式(3) |
|
‘V |
S |
起升机构的起动时间 |
式(72) |
|
G_________ |
S |
运行机构的起动时间 |
式(82)、式(N.2) |
|
G |
S |
机构起动时间 |
式(0.19) |
|
IS |
S |
一个循环期内停止的时间 |
式(0.2) |
|
G |
S |
起升机构的制动时间 |
式(76) |
|
L |
S |
运行机构制动时间 |
式(86〉 |
|
G |
S |
回转机构制动时间 |
式(88) |
|
AU |
V |
导线的电压降 |
式(128) |
|
V |
L |
油箱容积 |
式(92) |
|
V |
m/s |
风速 |
式(B.5) |
|
Vh |
m/s |
50年一遇的IO min时距平均暴风风速 |
式(16) |
|
Vb |
m/s |
变幅动滑轮组的移动速度 |
式(L.5)、式(N.4)、式((). 17) |
|
Vb |
m/s |
额定变幅速度 |
式(0.16) |
|
Vh |
m/s |
稳定起升速度 |
式(7) |
|
Vn |
m/s |
非工作状态计算风速 |
式(⑸ |
|
pl,(h) |
m/s |
高度h处的非工作状态计算风速 |
式(16) |
|
% |
m/s |
起升速度 |
式(75 )、式(L. 1 )、式 (0.11)、式(().18) |
|
% |
m/s |
额定起升速度 |
式(N.1) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
m/s |
满载下降且制动器开始有效制动时的下降速度 |
式(78) | |
|
m/s |
工作状态计算风速 |
式⑴) | |
|
% |
m/s |
塔式起重机的稳定运行速度 |
式(85) |
|
勺 |
m/s |
运行速度 |
式(L.2)、式(N.2) |
|
% |
m/s |
起重机或小车运行速度 |
式(0.14)、式(0.19) |
|
W |
m3 |
基础地面的抵抗矩 |
式(24)、式(25) |
|
W |
mm, |
销轴截面的抗弯模量 |
式(45) |
|
W, |
mm3 |
按受压最大纤维确定的毛截面抗弯模址' |
式(57) |
|
W, |
mm3 |
按受压最大纤维确定的截面对强轴(I轴)的抗弯模量: |
式(LI) |
|
w,、w, |
mm3 |
构件计算截面对强轴(7轴)和对弱轴3轴)的抗弯模量 |
式(52)、式(58) |
|
Wr、W, |
mm3 |
构件计算截面对强轴α轴)和对弱轴3轴)的抗弯模员 |
式(J.1)、式(J.2) |
|
Z |
电动机每小时折算全起动次数 |
式(0.9) | |
|
ZO |
钢球或滚柱个数 |
式(S.4)〜式(S.7) | |
|
ZA |
—■ |
(钢材质量组別选择的)残余应力影响评价系数 |
式(D.1) |
|
ZH |
■ |
(钢材质量组别选择的)材料厚度影响评价系数 |
式(D.4)、式(D.5) |
|
Z( |
— |
(钢材质址组别选择的)工作环境温度影响评价系数 |
式(D.6)、式(D.7) |
|
Z、 |
接头摩擦面数 |
式(40)、式(42) | |
|
a |
系数 |
式(37) | |
|
a |
—-■ |
系数 |
式(44) |
|
a |
(o) |
轨道倾斜的角度 |
式⑻) |
|
a |
相对空气动力长度 |
式(B.3) | |
|
Q1、。2、。3 |
..... |
系数 |
式(H.1) |
|
2_______ |
— |
载荷分配系数 |
式⑷) |
|
β2 |
« |
按起升状态级别设定的系数 |
式(7) |
|
為________ |
— |
(计算突然卸载动力系数们用的)系数 |
式(8) |
|
_A___________ |
■ |
简支梁受横向载荷的等效临界弯矩系数 |
式(LI) |
|
βl (咼〜区) |
杆i的角度 |
式(G.3)〜式(G.4) | |
|
δh |
mm |
横向载荷引起的变形 |
式(J.8) |
|
mm |
塔身中心线处的弯矩M引起的起重臂根部连接处的水平 位移 |
式(65) | |
|
C_____ |
力法广义荷载位移 |
式(G.11) | |
|
丄 |
mm |
起重臂根部连接处的水平静位移 |
式(65) |
|
δ |
— |
力法位移系数 |
式(G.U) |
|
S |
mm |
卷筒壁厚 |
式(R.1)、式(R .6)、式(R. 7) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
mm |
侧板根部板厚(不计圖角部分) |
式(R.9)、式(RlO) | |
|
起动駆动力系数 |
式(IO) | ||
|
—• |
平均駆动力系数 |
式(10) | |
|
枷 |
— |
起升动力系数 |
式(7)、式(18) |
|
φ'2n∖in |
— |
与起升状态级别相对应的起升动力系数的最小值 |
式(7) |
|
03 |
— |
突然卸载动力系数 |
式(8) |
|
驱动机构加减速动力系数 |
式(9) | ||
|
—— |
动态试验载荷动力系数 |
式(18) | |
|
们 |
— |
缓冲器碰撞时,考虑其弹性效应的动力系数 |
式(19) |
|
y |
m∕(Ω ∙ mm)2 |
导线电导率 |
式(128) |
|
— |
抗力系数 |
式(40)〜式(42) | |
|
— |
高危险度系数 |
式(20) | |
|
y. |
— |
考虑开孔对结构件应力的影响系数 |
式(29)、式(33) |
|
■■ |
考虑孔形的影响系数 |
式(40)、式(42) | |
|
7 |
— |
非工作状态下剩余起升载荷的系数 |
式(13)、式(14) |
|
Ii |
— |
起升物品时起升机构传动装置和绳轮系统的总效率 |
式(67)、式(L. 1 )、式 (N.1)、式(().11) |
|
V |
运行机构总传动效率 |
式(82 )、式(L.2 )、式 (().14)、式(().19) | |
|
Ti |
■— |
冋转机构的总传动效率 |
式(89)、式(1,4)、式(N. 3)、式(0.15) |
|
rI |
变幅机构总传动效率 |
式(L.3)、式(N .4)、式((). 17) | |
|
rI |
变幅机构及绳轮系统总传动效率 |
式(L.5) | |
|
— |
机构传动装置和绳轮系统的总效率 |
式(L.9) | |
|
7 |
— |
机构总传动效率 |
式(N.2) |
|
/ rI |
— |
物品下降时起升机构传动装置和绳轮系统的总效率 |
式(71)、式(77) |
|
h |
— |
导向滑轮的效率 |
式(115) |
|
7/ |
■― |
单个滑轮的效率 |
式(115) |
|
■ |
电动机在功率P“,时的效率 |
式(0.1) | |
|
7.v |
— |
电动机在PSI时的效率 |
式(0.1) |
|
如 |
钢丝绳系统的总传动效率 |
式(115) | |
|
(P |
■ |
轴心受压稳定系数 |
式(46) |
|
(P |
■ |
平面格构式构件的充实率 |
式(B.4) |
|
符号或代号「 |
单位 |
含 义 |
备注 |
|
■ |
构件侧向屈曲稳定系数 |
式(56) | |
|
(Pb |
— |
绕构件强轴弯曲所确定的受弯构件侧向屈曲稳定系数 |
式(57) |
|
啊 |
— |
侧向屈曲稳定系数(整体稳定系数) |
式(1.1) |
|
(Pb |
简支的轧制槽钢梁构件的侧向屈曲稳定系数 |
式(1.3) | |
|
(Pb |
...... |
受弯构件侧向弯扭屈曲稳定性系数 |
式(J.2) |
|
Gh |
— |
稳定系数修正值 |
式(1.2) |
|
φψ |
轴心受压稳定系数φ和其修正系数■的乘积,冇孔心和 亿、0、之分 |
式(54) | |
|
tanφ |
威勒曲线斜率 |
式(103)、式(104) | |
|
cosφ |
功率因数 |
式(128) | |
|
A |
实腹式构件的长细比 |
式(49)、式(64) | |
|
A |
— |
构件长细比 |
式(H.1) |
|
A |
— |
空气动力长细比 |
式(B.2) |
|
A |
— |
水平侧向载荷系数 |
式(C.1) |
|
ʌ AS |
— |
电动机平均起动转矩倍数 |
式(74) |
|
ʌ AS |
— |
相对于P、的平均起动转矩倍数 |
式(N.2) |
|
人F |
— |
实腹式构件的假想长细比 |
式(49) |
|
為 |
格构式构件的换算长细比 |
式(50) | |
|
XhF |
■ |
格构式构件的假想换算长细比 |
式(50) |
|
ʌʌʃ AV |
— |
起重臂分别对虚轴ʃʧ和W 的折算长细比 |
式(G.10) |
|
Am. |
— |
相对于PS时的电动机最大转矩倍数 |
式(N.1) |
|
AB |
正则长细比 |
式(H.1) | |
|
L、人 Jr |
■■ |
构件对通过形心的强轴徐轴)或弱轴(y轴)的长细比 |
式(47)、式(53)、式(64) |
|
— |
起重臂分别对虚轴∙r-∙r和Vy的长细比 |
式(G.10) | |
|
AV_______________ |
— |
受穹构件(梁)截面对弱轴(y轴)的长细比 |
式(LI) |
|
IimA |
— |
构件的控制长细比 |
式(64) |
|
μ |
— |
抗滑移系数 |
式(40)、式(42) |
|
卩 |
车轮轴承摩擦阻力系数 |
式(80) | |
|
灼/2 |
—■ M |
构件的计算长度系数 |
式(66) |
|
Pl |
与构件支承方式有关的计算长度系数 |
式(G.1) | |
|
变截面构件的计算长度系数 |
式(G.1) | ||
|
#3 |
— |
对于端部或中间部位冇拉索(钢丝绳或拉杆)的构件,考虑 拉索非保向力作用的受压构件的计算K度系数 |
式(G.1) |
|
—— |
考虑双轴向力作用的受压结构件的计算长度系数 |
式(G.1) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
θ |
(o) |
公称接触角 |
式(S.4)、式(S.5) |
|
(°) |
分别为拉索1和拉索2与起重臂截面形心连线之间的 夹角 |
式(G.13)〜式(G.16) | |
|
σ |
N∕mm2 |
焊缝的拉(压)力应力 |
式(34) |
|
σ.r |
N/mm2 |
最大应力 |
式(101)、式(102) |
|
σ |
N/ mm2 |
最大正应力 |
式(112) |
|
% |
N∕mm2 |
螺栓连接中结构件的抗拉强度 |
式(37) |
|
Ob |
N∕mm2 |
钢材的抗拉强度 |
式(94) |
|
Ob |
N∕mm2 |
铸钢材料的抗拉强度 |
式(R.8) |
|
N∕mm^ |
铸铁材料的抗拉强度 |
式(RJl) | |
|
% |
N∕mm2 |
钢丝绳绕出处卷筒壁局部弯曲应力 |
式(R.2) |
|
/ b M |
N∕mm2 |
卷筒侧板弯曲应力 |
式(R.5) |
|
% |
N/ mm2 |
螺栓材料的抗拉强度 |
式(37) |
|
% |
N/ mm2 |
抛光试件在交变旋转弯曲作用下的疲劳极限值 |
式(96) |
|
¢. |
N∕mm2 |
钢丝绳绕出处卷筒壁的压应力 |
式(R.]) |
|
、/mm2 |
机械零件的疲劳极限 |
式(105) | |
|
OG |
N∕mm2 |
结构构件纵向拉伸应力 |
式(D.1) |
|
结构件或机械零件中在T.作期限内发生的各个不同应力 的大小 |
式(5) | ||
|
^mHX |
为S ,σ2,σ3.∙∙∙,σ.,中的最大者 |
式(5) | |
|
N/mm2 |
机械零件的拉伸或压缩疲劳强度 |
式(107) | |
|
N∕mm2 |
销轴连接中结构件的屈服点 |
式(44) | |
|
N/mm' |
构件材料的屈服点 |
式(49)、式(55)、式(H.1)、 式(1.1)、式(1.3) | |
|
N∕mm2 |
材料的屈服点 |
式(R.4) | |
|
N∕mm2 |
钢材的屈服点 |
式(93)、式(D.1) | |
|
N∕τnm2 |
螺栓材料的屈服点 |
式(S. 11) | |
|
N∕mm2 |
高强度螺栓材料的屈服点 |
式(41) | |
|
% |
N∕mm2 |
销轴材料的屈服点 |
式(44) |
|
巳 |
N∕mm2 |
钢丝的公称抗拉强度 |
式(117) |
|
^UT、ɪ, UT |
N∕mm2 |
零件拉伸、压缩、弯曲和扭转询切的疲劳极限 |
式(98)〜式(IOO) |
|
C e |
N/mm" |
结构件同一验算点上两个垂直方向的正应力 |
式(28) |
|
max、 m*M、r<> nux |
N∕mm2 |
在构件(或连接)疲劳计算点上的绝对值最大的正应力和 绝对值最大的的应力 |
式(59) |
|
符号或代号 |
单位 |
含 义 |
备注 |
|
min、 by min、^ly min |
N/mm? |
应力循环中与σrmBMxσv nwx、r,『ax相对应的同一疲劳计算 点上的一组应力值,其与最大应力值(均各带正负号)之差 的绝对值为最大 |
式(59) |
|
叽 |
N∕mm2 |
与。5“相应的拉伸疲劳强度 |
式(60)〜式(63) |
|
f |
N/mm2 |
与X相应的压缩疲劳强度 |
式(60)〜式(63) |
|
N∕mm2 |
ɪ方向或y方向的最大正应力 |
式(114) | |
|
服、% |
N∕mm2 |
ʃ方向或V方向的正应力疲劳强度 |
式(114) |
|
^yrl |
N/mm? |
与%∙5相应的拉伸疲劳强度 |
式(60)〜式(63) |
|
^yrr |
N∕mm2 |
与Cm相应的压缩疲劳强度 |
式(60)〜式(63) |
|
b" |
N∕mm2 |
与匕5相应的拉伸或压缩疲劳强度 |
式(60)〜式(63) |
|
4, |
N/mm2 |
与相应的拉伸或压缩疲劳强度 |
式(60)〜式(63) |
|
Iimb |
N/mm? |
结构件材料的拉压极限设计应力 |
式(28) |
|
Iimb |
N/mm2 |
构件材料的极限设计应力 |
式(52)、式(57) |
|
Iimbr |
N/mm2 |
螺栓连接中结构件的抗挤压极限设计应力 |
式(37) |
|
Iim匕 |
Wmm2 |
销轴连接中结构件的抗挤压极限设计应力 |
式(44) |
|
IimbW |
N∕mm2 |
焊缝的拉压极限设计应力 |
式(34) |
|
Iimσz |
N/Inm2 |
摞栓的拉伸极限设计应力 |
式(39) |
|
limb' |
N∕mm2 |
销轴的拉伸极限设计应力 |
式(45) |
|
N∕mm2 |
钢材的基本许用应力 |
式(93)、式(94) | |
|
⑶ - |
N∕mm2 |
材料的许用应力 |
式(R.3) |
|
W - |
N/mmɔ |
材料许用压应力 |
式(R.6)、式(RR) |
|
[財 - |
N/mm2 |
铸造材料许用应力 |
式(R.9)、式(R・】0) |
|
成] - |
N∕mm2 |
机械零件拉伸或压缩疲劳许用应力 |
式(110〉、式(112) |
|
ΣJ |
kg ・ m2 |
塔式起取机回转制动时.回转机构及含吊运物品在内的全 部回转运动质量换算到电动机轴(制动器轴)上的机构总 转动惯At |
式(88) |
|
τ |
N∕mm2 |
结构件同一验算点上的苗应力 |
式(28) |
|
r |
N∕mm2 |
焊缝的妁应力 |
式(34) |
|
F |
、/mm2 |
最大乾应力 |
式(113)、式(114) |
|
N/mm2 |
机械零件的剪切疲劳极限 |
式(106) | |
|
τr |
N/Tnm2 |
机械零件的剪切疲劳强度 |
式(108) |
|
W - |
N∕mm2 |
机械零件的剪切疲劳许用应力 |
式(Ill) |
|
Γu∙ |
N∕mm2 |
抛光零件在交变剪切(纯剪切或扭转)作用下的疲劳极限 |
式(96) |
|
C、弓 |
、/mm2 |
同一验算点上两个垂直方向的剪应力 |
式(35) |
|
5 |
N∕mm2 |
与C,gX相应的剪切疲劳强度 |
式(60)〜式(63) |
|
符号或代号 |
单位 |
含 义______________ |
备注 |
|
Iimr |
N∕mm2 |
结构件材料的剪切极限设计应力 |
式(32) |
|
Iimr |
N∕mm2 |
螺栓的剪切极限设计应力 |
式(36) |
|
Iimr |
N/mm2 |
销轴的剪切极限设计应力 |
式(43) |
|
IimTW |
N∕mm2 |
焊缝的剪切极限设计应力 |
式(35) |
|
ω |
—— |
运行摩擦阻力系数 |
式(N.2)、式(().14)、 式(0.19) |
|
£ |
相对缓冲能量: |
式(19) | |
|
Ψ |
— |
轴心受压稳定系数的修正系数,有对X轴的叱和对y轴的 心之分 |
式(54) |
|
Ψ |
— |
折减系数,为适合有限长构件而折减Co |
式(B.1) |
参考文献
[I]
⑵
[4]
[5]
⑹
[7]
[8]
[9]
[10]
[II]
[⑵
GB/T 5277紧固件螺栓和螺钉通孔
GB/T 19418钢的弧焊接头缺陷质量分级指南
GB/T 20304-2006塔式起重机稳定性要求
GB/T 20863.1—2007
GB/T 20863.3—2007
GlVT 22437.1—2008
GB/T 22437.3—2008
GB/T 24809.3—2009
GB/T 24811.1—2009
起重机
起重机
起重机
起重机 起重机
分级第1部分:总则
分级 第3部分:塔式起重机
载荷与载荷组合的设计原则 第1部分:总则
载荷和载荷组合的设计原则 第3部分:塔式起重机
对机构的要求 第3部分:塔式起重机
起重机和起重机械 钢丝绳选择 第1部分:总则
GB 50068-2001建筑结构可靠度设计统一标准
ISO 2394 :1998 General PrinCiPIeS On reliability for StrUCtUreS
ISO 6336-1: 2006 CaICUlatiOn Of IOad CaPaCity Of SPUr and helical gears—Part 1: BaSiC
PrinCiPIeS♦ introduction and general influence factors
Γ13j ISO 6336-2j2006 CaiCUiatiOn Of IOad CaPaCity Of SPUr and helical gears—Part 2: Calculation Of SUrfaCe durability (Pitting)
[14J ISO 6336 — 3:2OO6 CaICUIatiOn Of load CaPaCity Of SPUr and helical gears—Part 3: Calculation Of IOOth bending Strength
L15] ISO 20332:2008 CraneS—PrOOf Of COmPetenCe Of Steel StrUCtUreS
L16j EN 13001-1 :2OO4 +Al :2009 CraneS—General design—Part 1: General PrinCiPIeS and re-quiremcnts
[17] EN 1991-1-4: 2005 EUrOCOde 1: ACtiOnS On StrUCtUreS—Part 1-4: General actions— Winel.actions
[18] EN 1993-1-8:2005 EUrOCOde 3 ∙ DeSign Of Steel StrUCtUreS—Part 1-8: DeSign Of joints
[19] EN 13001 1 :2004 +Al :2009 CraneS一General design—Part 1:Generai PrinCiPIeS and requirements
[20] EN 13001-2j2004÷ A3 :2009 Crane Safety—General design —Part 2: LOad effects
[21] PrEN 13001-3-1 ∙2008 CraneS—GeneraI design—Part 3. 1:Limit StateS and PrOOf Of competence Of Steel StrUCtUreS
[22] EN 14439 :2006 +A2 :2009 CraneS—Safety—TOWer CraneS
[23] FEM 1.001:1998 RUIeS for the design Of hoisting appliances
GB/T 13752-2017
版权专有侵权必究
#
书号:155066 • 1-55018
定价] 12400元